Изобретение относится к космической технике и, в частности, может быть использовано как управляющее средство космических аппаратов B 64 G 1/24, как устройство управления солнечными батареями B 64 G 1/44, как стабилизированная платформа, используемая для навигационных целей G 01 C 9/10.
Для обеспечения функционирования какой-либо космической системы ориентации /КСО/, ей задается привязка к базисным точкам космического пространства. В большинстве случаях, главным ориентиром выбирается Солнце. Известны два основных принципа космической ориентации, использующих Солнце:
- использование Солнца как источник света для датчиков положения навигационного комплекса космического аппарата /КА/, выдающего команды на работу силовых агрегатов ориентации;
- использование излучаемой энергии Солнца конструктивными элементами КА, принимающими оптимальное, пространственно-ориентируемое положение КА в направленном потоке солнечной энергии.
КСО первого типа имеют практические разработки и применяемы на действующих КА. Основные их составляющие: бортовой навигационный комплекс, включающий оптические датчики светил, гироскопические датчики базисных координат КА; силовые исполнительные агрегаты, состоящие из реактивных топливных двигателей или реактивных разгрузочных и корректирующих двигателей /на сжатом газе или быстроиспаряющихся жидкостях/ и/или электроприводных инерционных силовых гироскопов с вращающимися реактивными массами; вычислительный комплекс и автоматики управления работы отдельных блоков и агрегатов и всей системы ориентации. /SU, п. N 1782221, B 64 G 1/24, 15.12.92; RU, п. N 2066287, B 64 G 1/24, 10.09,96/.
КСО второго типа имеют лишь теоретические разработки и рассматриваются как перспективные, для работы в дрейфующем режиме. Конструктивно, эти КСО представляют собой "парусные" или рефлекторные аппараты, использующие исходящую от Солнца энергию в форме "солнечного ветра" и фотонного потока. Принцип работы таких конструкций основан на использовании законов аэродинамики в сильно разреженной среде и отражательной оптики, либо с неизменяемой формой геометрии КА при пассивном способе ориентации /SU, п. N 1655842, B 64 G 1/36, 15.06.91/, либо с изменяемой формой активных поверхностей КА при управляемой ориентации /Фр. , з. N 2704515, B 64 G 1/24, 27/04/93; EPO. п.N 399055, B 64 G 1/40, 27.11.89.
Известны конструкции, комбинирующие элементы первого и второго типов КСО /Фр., з. N 2550757, B 64 G 1/36, 20.03.84/.
К недостаткам первых КСО относится: техническая сложность, многозвенность навигационного комплекса, многоступенчатость в работе блоков и агрегатов его составляющих, необходимость в пополнении расходными материалами /топливом/, в обеспечении надежного электропитания, в дублировании отдельных блоков, в оснащении контрольной телеметрией.
К недостаткам вторых КСО относится: сложность монтажа в условиях открытого космоса конструкций с большими площадями активной поверхности и малой массой, большая инерционность работы таких конструкций, уязвимость и ненадежная работа при попадании в метеоритные потоки, подверженность дезориентирующим воздействиям магнитных, электромагнитных, гравитационных полей и др. космических влияний.
Цель изобретения состоит в создании космической системы ориентации на Солнце относительно простой и компактной конструкции, надежно работающей в автономном режиме и функционирующей за счет непосредственного использования солнечной энергии.
Поставленная задача решается применением в конструкции КСО термочувствительных элементов /ТЧЭ/, работающих и как датчики направленного солнечного излучения, и как исполнительные механизмы, использующие энергию Солнца. При этом ТЧЭ сгруппированы и скомпонованы вокруг осей ориентации КСО в отдельные механизмы ориентации /МО/, в которых механическими устройствами осуществляется процесс симметричного, термофизического, сбалансированного состояния между ТЧЭ и восстановления ориентируемого положения оси каждого МО относительно Солнца под действием реактивных моментов вращения масс деталей и узлов системы, возникающих при дезориентации КСО.
Преимущества такой космической термомеханической системы ориентации на Солнце /КТСОС/ заключается в том, что она технически выполнима при существующем уровне техники и применима для работы как в "ближнем", так и "дальнем" космосе /околосолнечного пространства/, работает в автономном и автоматическом режиме, используя солнечную энергию путем ее термомеханического преобразования. Для непосредственной работы КТСОС не требуются расходные материалы и электроэнергия, отсутствуют сложные оптические или электронные датчики Солнца, не применяются электроприводные гироскопические установки, электронно-вычислительные и контролирующие устройства.
Аналогами могут быть изобретениями: RU N 2066287; B 64 G 1/24; 10.09.96; FR N 2704515; B 64 G 1/24; 27.04.93. В качестве прототипа может быть выбрано изобретение по патенту RU N 2090777; F 03 G 6/00; 20.09.97.
Указанный технический результат достигается тем, что конструкция КТСОС состоит по меньшей мере из двух идентичных механизмов ориентации, содержащих ТЧЭ, и по меньшей мере одного базис-модуля, посредством которого МО соединены своими ориентируемыми осями таким образом, что их продольные геометрические оси, являясь осями ориентации КТСОС, лежат в плоскости перпендикулярно ориентируемой потоку солнечных лучей и направлены под определенным углом друг к другу, /в зависимости от количества МО/. При этом каждый МО снабжен диском перекоса и устройством отслеживания максимального угла перекоса упомянутого диска, включающим в себя по меньшей мере один ролик качения по дорожке качения перекоса со средством обеспечения прижима ролика к диску, кинематически связанного через ось-водило с ориентируемой осью МО, причем ТЧЭ сопряжены по схеме люфтового соединения с диском перекоса каждого МО с шагом по его окружности и прикреплены к соответствующему основанию МО. Основание каждого МО расположенного строго перпендикулярно ориентируемой оси и сопряжено с ней в своей центральной части, посредством подшипника/ов/. На каждом основании установлена светоэкранирующая конструкция, расположенная за ТЧЭ соосно ориентируемой оси и имеющая центрирующее колесо, сопряженное с ориентируемой осью по ступице через подшипник.
В зависимости от технических целей или технологических задач КА, конструктивной компоновки механизмов ориентации - базис-модуль КТСОС может представлять собой либо монолитную деталь с элементами крепления, либо шарнирную конструкцию с возможностью фиксации сочленений, для габарито-оптимального транспортирования с последующим развертыванием МО относительно друг друга, кроме того, базис-модуль может представлять собой многопролетную рамочную конструкцию, либо объемный каркас из фермовых конструкций. К базис-модулю так же крепятся технологический гелиоэлемент/ы/: либо в фиксированном положении, либо шарнирно, с возможностью изменения положения относительно базис-модуля. На базис-модуле устанавливаются, по необходимости двигатели коррекции траектории полета /орбиты/, преобразователи и накопители энергии от гелиоэлементов, излучатель/и/ энергии с системой точного наведения на приемник, радиоаппаратура, научные приборы, стыковочные узлы для крепления пилотируемых и безпилотных КА для совместной работы.
В другом варианте, КТСОС состоит более чем из двух МО, при этом их оси ориентации так же лежат в одной плоскости и крепятся к базис-модулю симметрично общему центру: либо по схеме правильного многоугольника, либо симметричной "звезды"; либо в центральной части КТСОС, либо по периферии и, возможно, в разных частях КА посредством индивидуальных базис-модулей.
Для обеспечения надежной работы каждого МО КТСОС, при разных вариантах и степени наклона диска перекоса, средство обеспечения прижима ролика качения к диску может иметь конструкцию шарнирного параллелограмма, снабженного по меньшей мере одной пружиной.
Для повышения чувствительности устройства отслеживания максимального угла перекоса диска перекоса, дорожка качения имеет конусообразную полированную поверхность.
Как вариант повышения чувствительности устройства отслеживания, оно включает два ролика качения, оси-водила которых составляют острый угол между собой, сопрягаясь с ориентируемой осью.
При значительной дезориентации КТСОС относительно Солнца с возможным образованием излишне больших вращающих моментов и реактивных скоростей вращения, возможно создание ограничительных сил трения посредством применения разгрузочных роликов качения или тормозных колодок по диску перекоса, либо по ориентируемой оси, работающих от центробежного механизма.
С целью уменьшения инерционности работы КТСОС посредством ускорения процесса теплообмена каждого ТЧЭ, экранирующая конструкция каждого МО состоит из сегментов параболообразного профиля с зеркально отражающими вогнутыми поверхностями.
С целью полезного использования объема полых деталей в конструкции КТСОС, ориентируемая ось каждого МО выполнена герметичной и, кроме того, может иметь увеличенный диаметр в пределах экранирующей конструкции, для использования в качестве полезной емкости.
Кроме того, каждый ТЧЭ может быть выполнен в виде полосы из твердого материала с большим удельным коэффициентом температурного удлинения, имеющей плоскую, зачерненную рабочую поверхность. При этом для предотвращения боковых и поперечных деформаций, ТЧЭ удерживается с возможностью продольного перемещения по меньшей мере одним направляющим поясом на экранирующей конструкции.
Как вариант, каждый ТЧЭ может состоять из нескольких полос твердого материала, соединенных продольными стержнями из материала с минимальным или отрицательными температурным коэффициентом, по телескопической схеме, образующих компактный ТЧЭ пакетного типа.
Как вариант, каждый ТЧЭ представляет собой конструкцию с термообъемным расширением рабочего тела, выполненную в виде герметичной панели с плоской зачерненной рабочей поверхностью, с внутренними сообщающимися полостями, заполненными рабочими газом /газовой смесью/. Внутренний объем панели сообщается соединительной трубкой с исполнительным механизмом в виде сильфона.
На фиг. 1 - общий вид в аксонометрии космической термомеханической системы ориентации на Солнце, состоящей из двух механизмов ориентации, работающих относительно осей X и Y, монолитного базис-модуля и жестко закрепленного на нем технологического гелиоэлемента в виде панели солнечных батарей в ориентируемой плоскости X-Y, перпендикулярной оси Z, и направленной на центр солнечного диска.
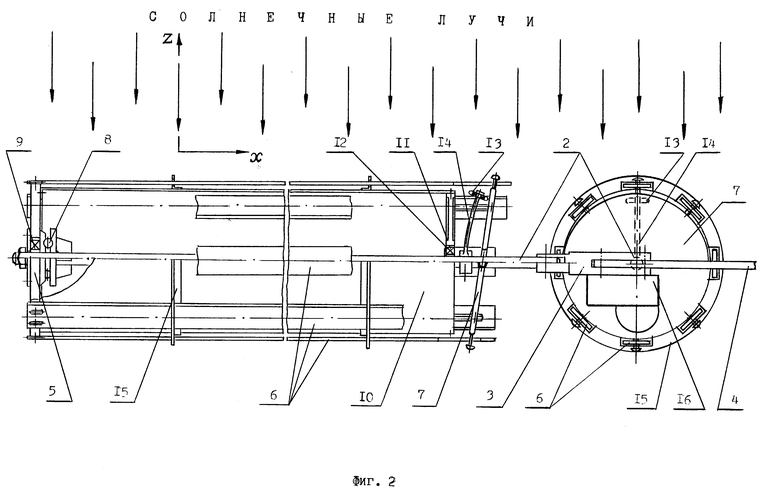
На фиг. 2 - проекция КТСОС на плоскость X-Y с разрезом механизма ориентации с осью X.
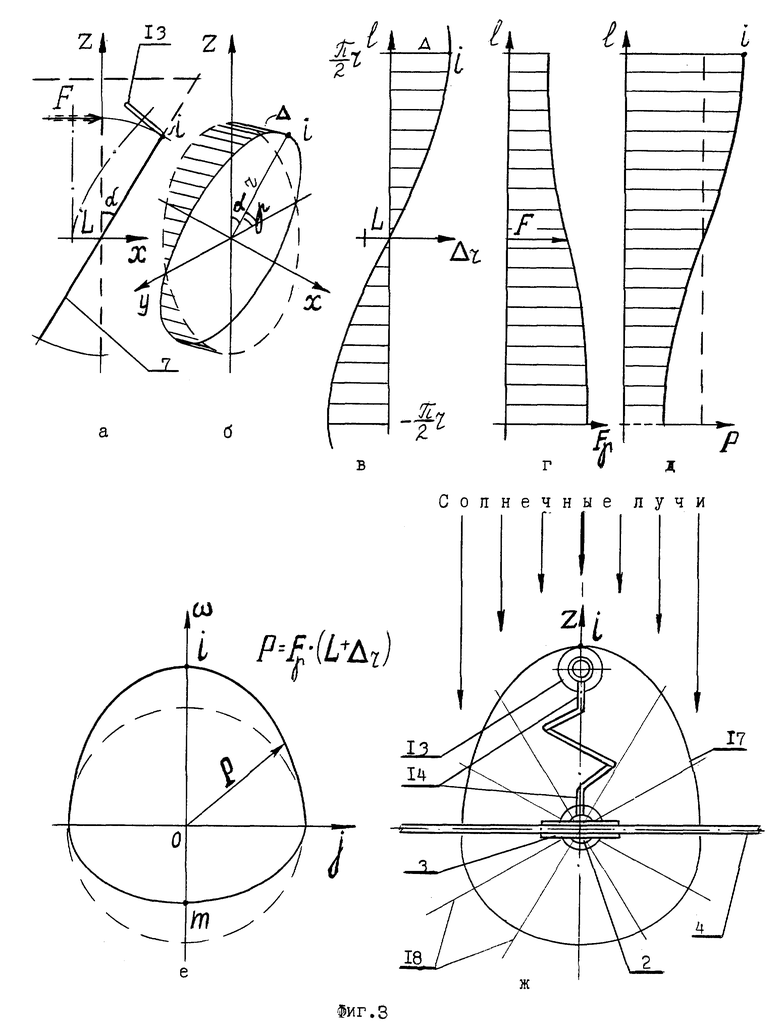
На фиг. 3 - схема преобразования объемной конструкции МО в гипотетическую, эквивалентную плоскую модель с термочувствительным ободом.
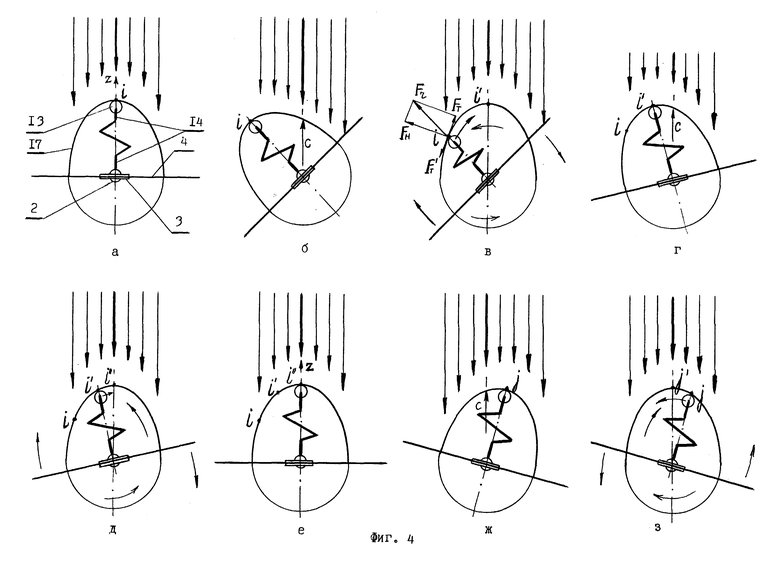
На фиг. 4 - поэтапные схемы, поясняющие работу гипотетической модели с термочувствительным ободом по ориентации на Солнце.
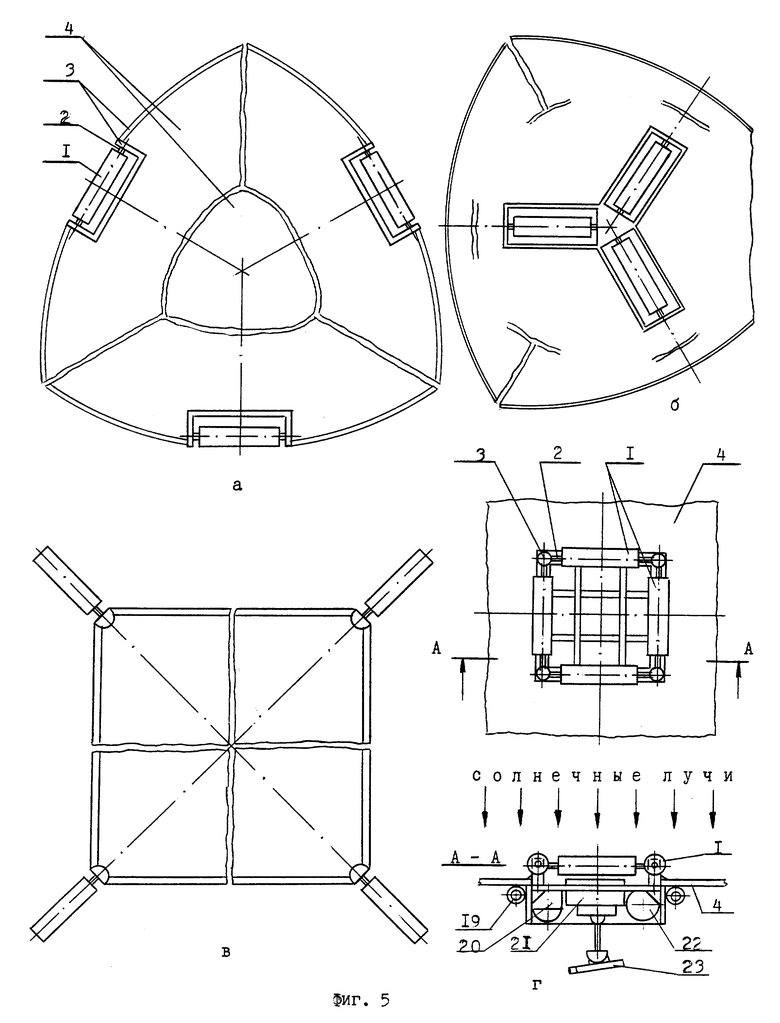
На фиг. 5 - варианты схем КТСОС, состоящих более чем из двух механизмов ориентации.
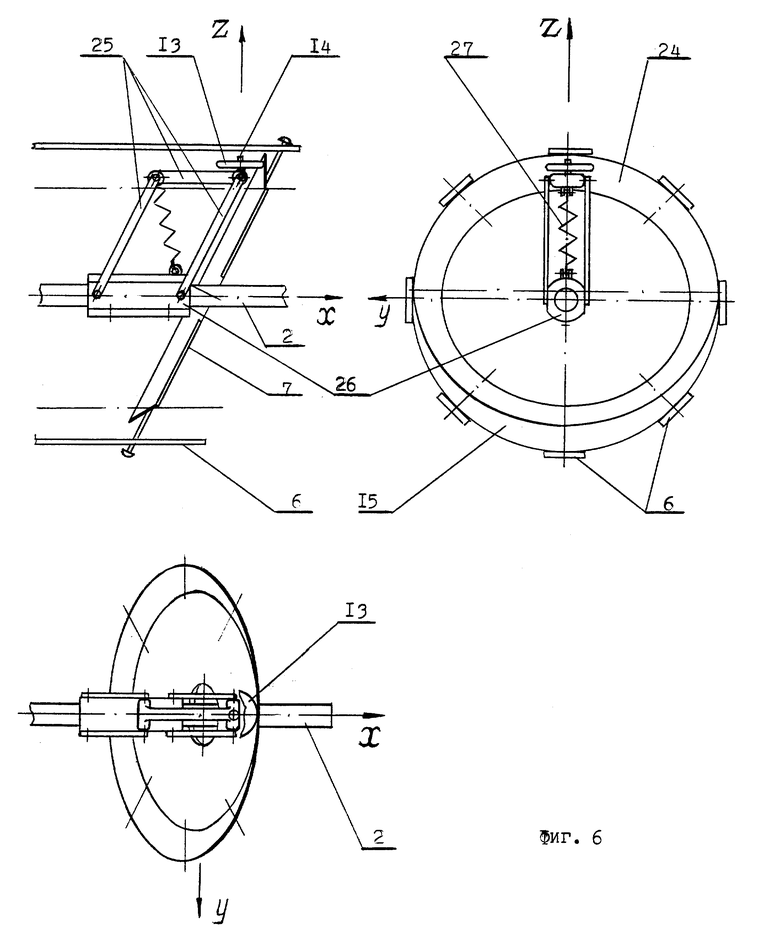
На фиг. 6 - три проекции устройства отслеживания максимального угла перекоса диска перекоса с конусной поверхностью дорожки качения и со средством обеспечения прижима ролика к диску, имеющего конструкцию шарнирного параллелограмма.
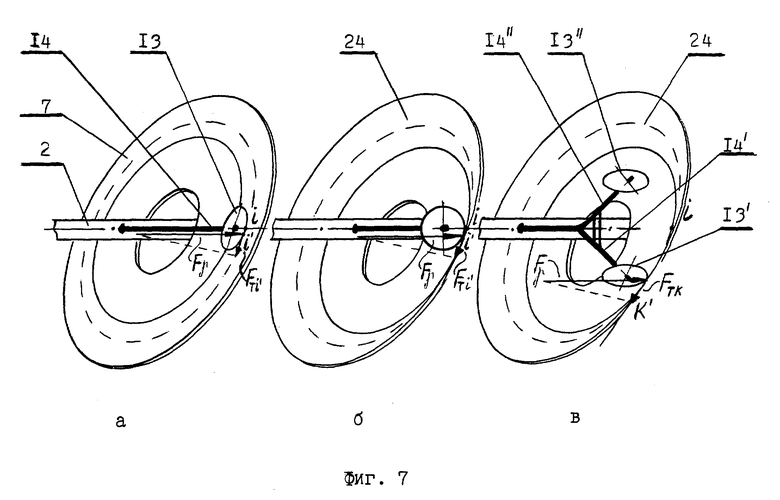
На фиг. 7 - схемы конструкций для сравнения работы устройств отслеживания угла перекоса с одним и двумя роликами качения.
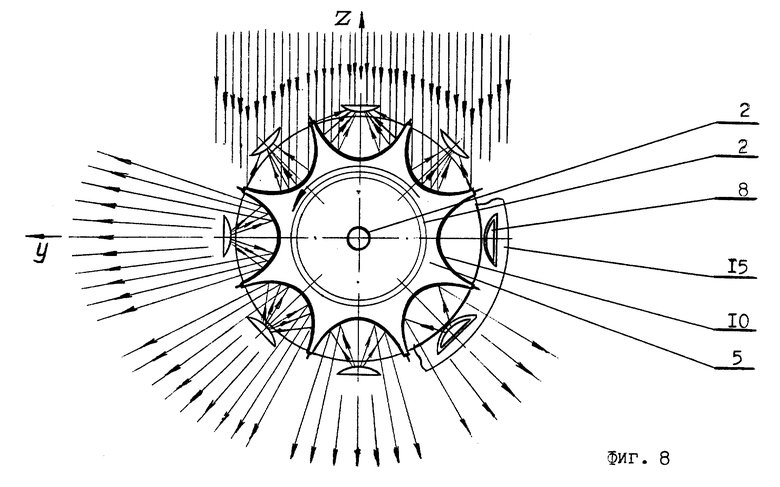
На фиг. 8 - схема и принцип работы экранирующей конструкции из зеркально отражающих сегментов параболического профиля.
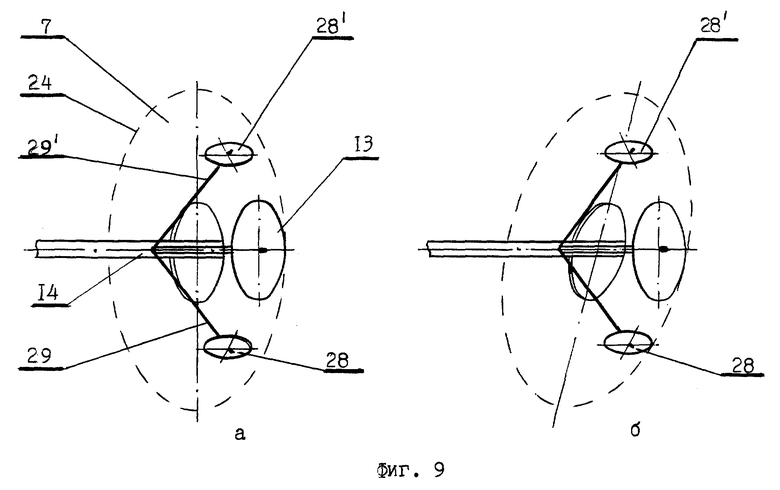
На фиг. 9 - схема устройства отслеживания максимального угла перекоса диска перекоса, оснащенного разгрузочными роликами качения.
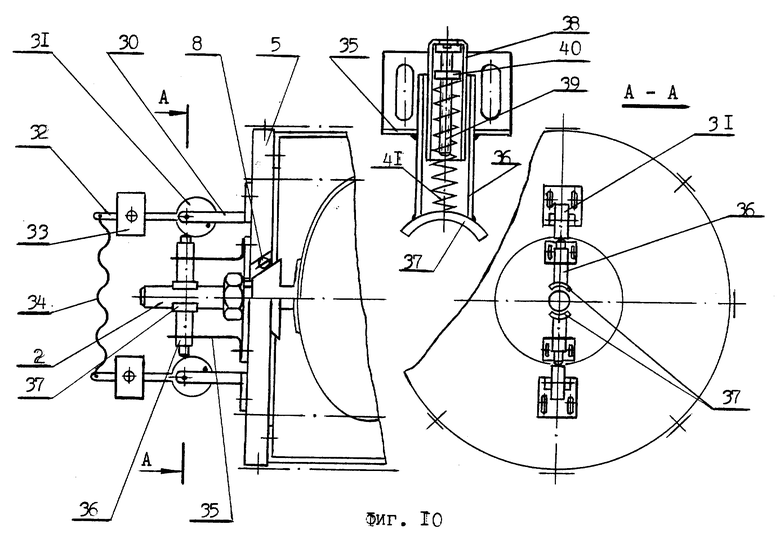
На фиг. 10 - схема разгрузочного устройства с тормозными колодками, работающими от центробежного механизма.
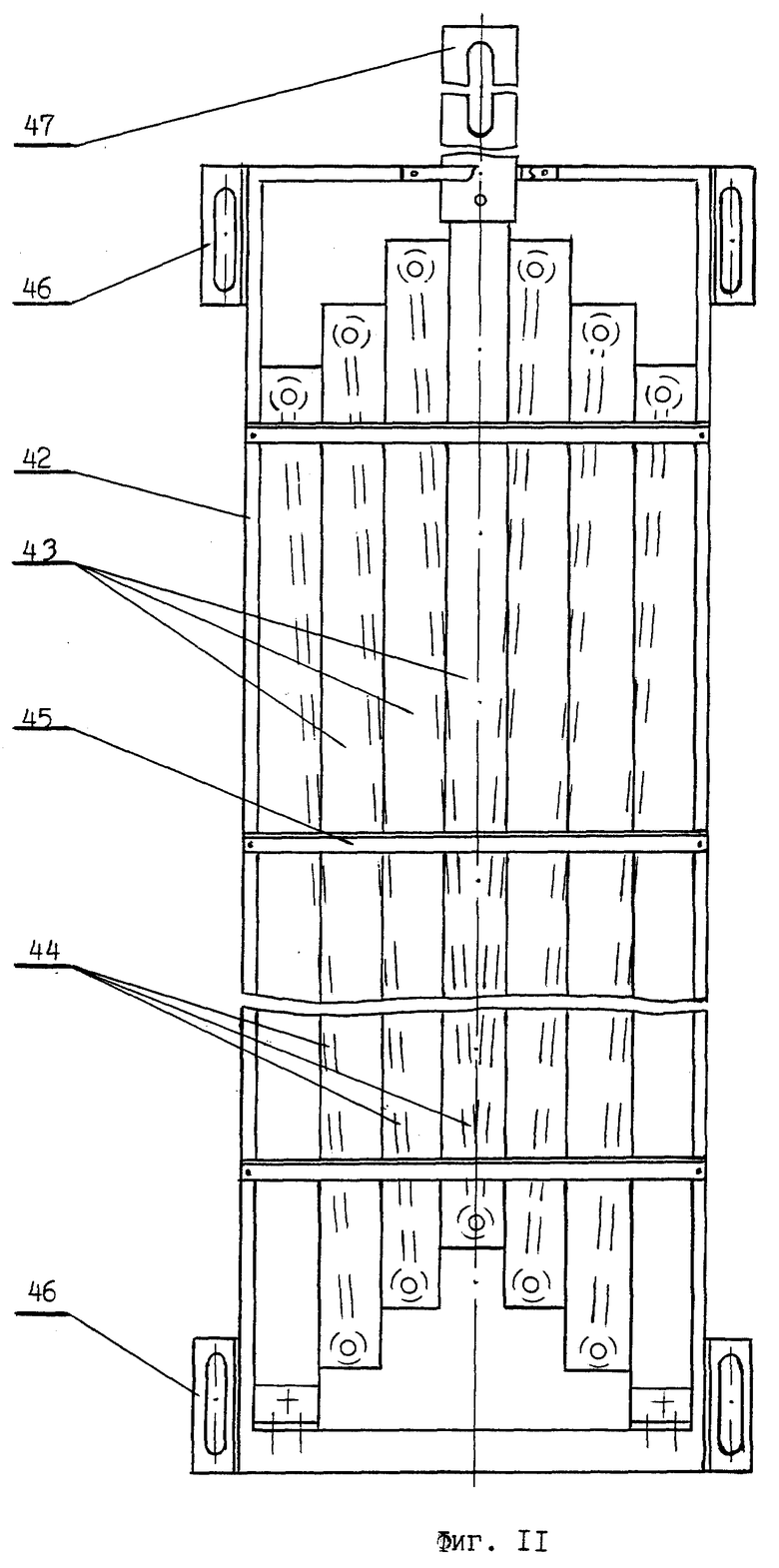
На фиг. 11 - конструкция термочувствительного элемента пакетного типа.
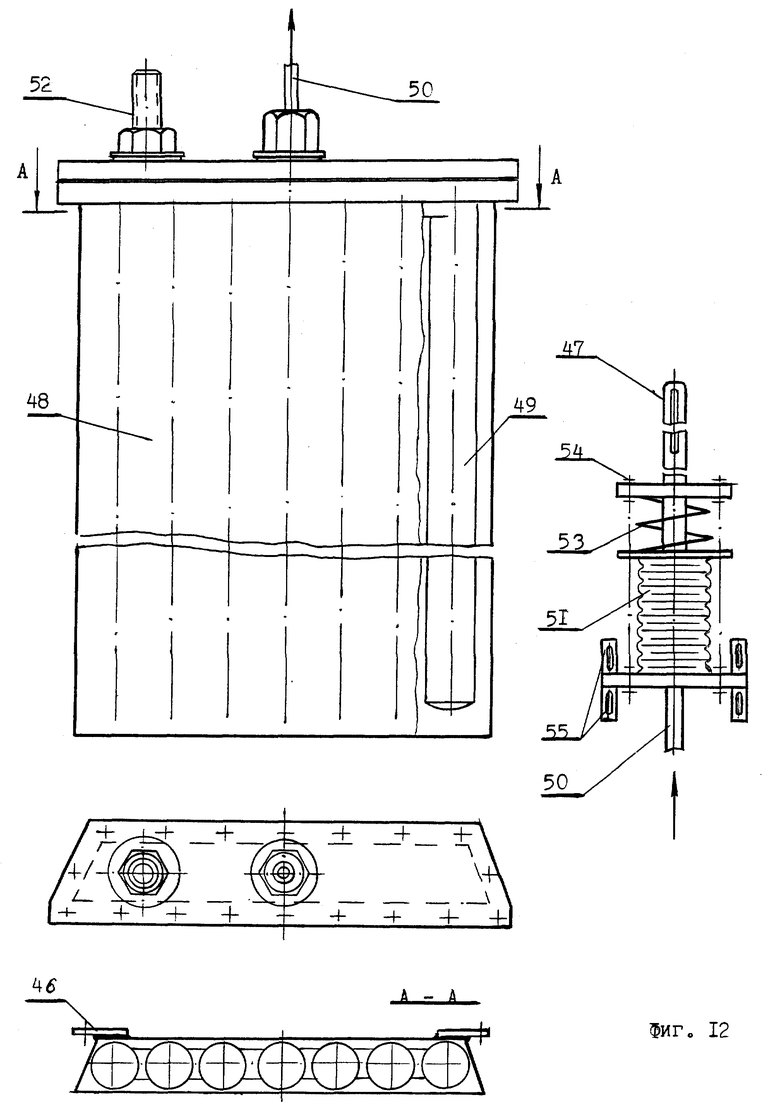
На фиг. 12 - конструкция термочувствительного элемента с термообъемным расширением газа.
Простейшая конструкция КТСОС, изображенная на фиг. 1, состоит из двух идентичных МО 1 с ориентируемыми осями 2 /x, y/ и базис-модуля 3. Геометрические продольные оси x и y соответствующих МО перпендикулярны друг другу и лежат в плоскости X-Y, в свою очередь, перпендикулярной оси Z, ориентируемой на центр солнечного диска. Базис-модуль 3 представляет собой конструкцию крепления ориентируемых осей 2 каждого МО и технологического гелиоэлемента 4 в виде панели солнечных батарей, а также другого космического оборудования /не показано/. Процесс ориентации рабочей поверхности технологического гелиоэлемента 4, совпадающей с плоскостью X-Y, перпендикулярно направлению солнечных лучей является результирующим двух процессов ориентации каждого МО относительно своей оси.
На фиг. 2 представлена та же КТСОС /фиг. 1/ в проекции на плоскость X-Z и с продольным разрезом МО 1 с осью X. Каждый механизм ориентации 1 состоит из основания 5, к которому с шагом по окружности прикреплены ТЧЭ своими фиксируемыми концами, с возможностью корректировки рабочей длины. На рабочих концах ТЧЭ 6 установлен диск перекоса 7 по схеме люфтового соединения /паз-штырь/. Основание 5 сопряжено с ориентируемой осью 2 через опорный 8 и радиальный 9 подшипники качения. Соосно ориентируемой оси 2, к основанию 5 прикреплена торцом экранирующая конструкция 10, придающая МО жесткость и препятствующая проникновению солнечных лучей на тыльные стороны неосвещаемых ТЧЭ. Противоположный торец экранирующей конструкции 10 оснащен центрирующим колесом 11, сопряженным по ступице с ориентируемой осью 2 через подшипник качения 12. Каждый МО снабжен устройством отслеживания максимального угла перекоса диска перекоса 7, состоящим из ролика качения 13 на оси-водиле 14 и средством прижатия ролика качения 13 к диску перекоса 7 /в данном варианте: ось-водило 14 является пружинным элементом/. Ролик качения 13 сопряжен с осью-водилом 14 через подшипник качения, а ось-водило 14 сопряжено с ориентируемой осью 2 установочной втулкой с фиксирующими деталями. Экранирующая конструкция 10 снабжена по меньшей мере одним направляющим поясом 15, удерживающим ТЧЭ 6 по длине и по окружности с возможностью продольного перемещения. Ориентируемые оси 2 каждого МО жестко крепятся к базис-модулю 3. При этом оси-водила 14 каждого МО 1 жестко крепятся на ориентируемых осях 2 /x, y/ соответственно в плоскостях X-Z и Y-Z, перпендикулярных плоскости X-Y. При соблюдении этих условий монтажа обоих МО, КТСОС будет удерживать в автоматическом режиме плоскость X-Y /гелиоэлемента 4/ в положении, перпендикулярном потоку солнечных лучей в данной области космического пространства. К базис-модулю 3 крепится также технологический гелиоэлемент 4 и космическое оборудование 16. Ролик 13 может прижиматься к диску перекоса 7 с наружной стороны, но при диаметрально противоположном положении оси-водила 14 относительно ориентируемой оси 2, при этом опорный подшипник 8 должен находиться с наружной стороны основания 5. Возможна замена двух подшипников 8 и 9 на один конический.
Для наглядного представления принципа работы МО, на фиг. 3 предлагается предварительно преобразовать объемную конструкцию МО в гипотетическую, теоретически эквивалентную плоскую модель, а на фиг. 4 - рассмотреть поэтапные позиции деталей этой модели, поясняющие ее работу "ориентации на Солнце". На фиг. 3а схематически дана конструкция устройства отслеживания максимального угла перекоса α диска перекоса 7 роликом качения 13 под действием прижимающей силы F объемной конструкции МО 1. На фиг. 3б дана эпюра /в аксонометрии/ отклонений точек дорожки качения на диске перекоса 7 от нейтрального положения при α = 0. При этом максимальное отклонение +Δ, зависящее от максимально нагреваемого ТЧЭ, находится на дорожке в т. i. Для любой точки дорожки отклонение определяется функцией Δr= f1(ΔT,γ), где ΔT - разница температур между максимально нагреваемым ТЧЭ и ТЧЭ на линии терминатора; γ - значение текущего угла радиуса дорожки качения r. На фиг. 3в изображена эпюра-развертка предыдущей эпюры в плоских координатах l-Δr. На фиг. 3г - эпюра действия прижимающей силы F, при условии принудительного обращения ролика качения вокруг ориентируемой оси. При этом Fγ= f2(F,γ,α,Qд), где γ = var/0-360o/; динамометрическая характеристика средства обеспечения прижима ролика к диску перекоса. На фиг. 3д представлена эпюра потенциала устойчивости ролика качения 13 в каждой точке дорожки качения на диске перекоса, определяемой по формуле P = Fγ•(L+Δr), или P = fз[F,γ,α,ΔT,Qд,(L+Δr)]. По этой эпюре видно, что наибольший потенциал устойчивости Pmax ролика качения /при достаточно жесткой и емкой Qд /находится в т. i - наиболее отклоняемой от нейтрального положения диска с максимальным углом α, соответствующим наиболее нагреваемому ТЧЭ, перпендикулярному солнечным лучам /фиг. 2/. На фиг. 3e представлена векторная эпюра функции P=f3[...] в плоских полярных координатах ω-j, где радиус-вектор  вращается синхронно углу γ. Получена плоская замкнутая кривая потенциала устойчивости ролика качения. Эта кривая теоретически соответствует дорожке качения на диске перекоса 7 и имеет свойство вытягиваться навстречу солнечным лучам с максимумом в т. i, касательная в которой перпендикулярна солнечным лучам. Минимальный потенциал в т. m - "мертвая точка". На основании полученной кривой-фиг. 3e схематически построена гипотетическая плоская модель - фиг. 3ж, с термочувствительным ободом 17 на центрирующих спицах 18 с возможностью вращения вокруг ориентируемой оси 2, к которой прикреплено ось-водило 14 со средством прижима ролика качения 13 к внутренней стороне термочувствительного обода 17. К ориентируемой оси 2 прикреплен базис-модуль 3 с технологическим гелиоэлементом 4.
вращается синхронно углу γ. Получена плоская замкнутая кривая потенциала устойчивости ролика качения. Эта кривая теоретически соответствует дорожке качения на диске перекоса 7 и имеет свойство вытягиваться навстречу солнечным лучам с максимумом в т. i, касательная в которой перпендикулярна солнечным лучам. Минимальный потенциал в т. m - "мертвая точка". На основании полученной кривой-фиг. 3e схематически построена гипотетическая плоская модель - фиг. 3ж, с термочувствительным ободом 17 на центрирующих спицах 18 с возможностью вращения вокруг ориентируемой оси 2, к которой прикреплено ось-водило 14 со средством прижима ролика качения 13 к внутренней стороне термочувствительного обода 17. К ориентируемой оси 2 прикреплен базис-модуль 3 с технологическим гелиоэлементом 4.
Принцип работы плоской модели по ориентации на Солнце представлен на фиг. 4. На фиг. 4а показано положение упрощенной модели /без спиц/ при осесимметричном, энергосбалансированном состоянии ее элементов относительно условного осевого солнечного луча, соединяющего центр солнечного диска и центр модели. При этом, точка максимальной деформации i термочувствительного обода /ТЧО/ 17 совпадает с точкой касания ролика качения 13 и лежит на осевом солнечном луче. Остальные точки ТЧО симметричны относительно осевого луча, при этом рабочая поверхность технологического гелиоэлемента 4 перпендикулярна солнечным лучам. Предположим, фиг. 4б, что модель повернута /дезориентирована/ относительно осевого солнечного луча на некоторый острый угол против часовой стрелки вокруг ориентируемой оси 2. Здесь точка касания i обода 17 с роликом 13 не лежит на линии осевого луча, следовательно теплоэнергетический баланс точек ТЧО 17 не соответствует тепловому потоку от Солнца. Начнется процесс температурного перераспределения и передеформации ТЧО с образованием нового максимума по направлению стрелки "С" - навстречу осевому солнечному лучу. Возникнет состояние модели, изображенное на фиг. 4в, при котором ТЧО примет новое осесимметричное энергосбалансированное состояние с максимумом в т. i' на линии осевого луча, но при этом ролик качения находится в невыгодном энергопотенциальном положении, поскольку Pi < P'i. Поэтому, под действием тангенциальной силы Fт, как составляющей прижимающей силы Fr, ролик качения будет перемещаться в т. i', поворачивая, посредством оси-водила 14, ориентируемую ось 2 и плоскость гелиоэлемента 4 по часовой стрелке к восстановлению ориентируемого положения. Однако, по закону механики, одновременно, равная по величине, но противоположная по направлению тангенциальная-реактивная сила F'т будет поворачивать ТЧО 17 против часовой стрелки. Два встречных вращения: с одной стороны - деталей 13, 14, 2, 3, 4 и с другой стороны - 17, /18/, приведут модель к промежуточному положению, показанному на фиг. 4г. Таким образом, модель не приобретает окончательного осесимметричного энергосбалансированного состояния относительно осевого луча, но степень дезориентации, по сравнению с позицией на фиг. 4б, будет меньше. Процесс перераспределения тепловой нагрузки и температуры по ТЧО и его новой деформации, а также встречное вращение деталей модели будет продолжаться, как показано на фиг. 4д, до тех пор, пока, наконец, точка касания ролика качения 13 не совпадает с точкой максимальной деформации ТЧО 17 в некоторой т. i'' на линии осевого луча - фиг. 4е. При противоположной дезориентации модели /по часовой стрелке/ и, в частности, от проскока предыдущего процесса, работа по восстановлению ориентируемого положения пойдет в противоположном направлении, по той же схеме - фиг. 4ж и 4з.
При реальной работе объемной конструкции МО 1 /и гипотетической/, процесс восстановления ориентируемого положения будет проходить не поэтапно, а плавно и единовременно с момента возникновения отклонения от осесимметричного, энергосбалансированного состояния, приводящего к перераспределению тепловых нагрузок на ТЧЭ /фиг. 1, 2/, перемещению максимального угла перекоса на диске перекоса 7, встречному вращению деталей МО: ролика качения 13 на оси-водиле 14 с ориентируемой осью 2, базис-модуля 3 со всем, что на нем закреплено - с одной стороны; диска перекоса 7, ТЧЭ 6, основания 5 с экранирующей конструкцией 10, центрирующим колесом 11 и направляющим поясом 15 - с другой стороны, а также соответственно сопряженных деталей подшипников качения 8,9,12. Возникающие абсолютные скорости вращения "статора" - первой группы деталей и "ротора" - второй группы деталей находятся в обратной зависимости от моментов инерции каждой группы и стремятся к нулю в процессе достижения ориентируемого положения каждого МО КТСОС за счет постепенной потери кинетической энергии вращения на преодоление сил трения в подшипниках с превращением ее в тепло. При этом возможно применение устройств, создающих дополнительные, регулируемые, разгрузочные силы трения.
Следует отметить, что при дезоориентированном положении МО, его вращающийся "ротор" работает в режиме "Солнечного двигателя", а противовращающийся "статор" - в режиме "Солнечного компаса". Причем, в условиях космической невесомости, вращения обоих частей МО физически реактивны друг-другу и происходят в механически замкнутой системе, функционируя за счет энергии Солнечных лучей.
На фиг. 5 представлены варианты схем КТСОС с компановкой более двух МО. Так введение третьего МО - на фиг. 5а и 5б повышает надежность в работе КТСОС, при наименьшей чувствительности в варианте из двух МО при дезориентации ее относительно оси, перпендикулярной биссектрисе угла ориентируемых осей. При этом, на схеме фиг. 5а три МО 1 скомпанованы равносторонним треугольником по ориентируемым осям 2 и закреплены ими к базис-модулю 3 по периферии технологического гелиоэлемента 4. На фиг. 5б - три МО расположены ориентируемыми осями "звездой" в центральной области гелиоэлемента. На фиг. 5в и 5г представлены КТСОС из четырех МО, отличные от первоначального варианта тем, что обеспечивают симметричность системы и дублируют друг-друга в случае выхода из строя парного МО. На фиг. 5г представлена подробная возможная схема КТСОС, в двух проекциях, из четырех МО, скомпонованных "квадратом" на базис-модуле 3 рамочной конструкции, на котором установлены: технологический гелиоэлемент 4, транспортные двигатели 19, емкости рабочего тела двигателей 20, блоки аккумуляции энергии 21, приборные отсеки с научно-исследовательским, технологическим и радиооборудованием, излучатель энергии с системой точного наведения 23. Возможен вариант КТСОС с компоновкой из пяти МО, причем пятый МО вводится в вариантах фиг. 5а, 5б. Применение большего количества МО не целесообразно.
На фиг. 6 изображен вариант схемы, в трех проекциях, устройства отслеживания максимального угла перекоса диска перекоса 7 роликом качения 13 на оси-водиле 14, состоящее из тяг 25, и установочной втулки 26, крепящейся на ориентируемой оси 2 неподвижно. Тяги 25 и установочная втулка 26 образует шарнирный параллелограмм, в короткой диагонали которого установлена по меньшей мере она стягивающая пружина 27. Такая конструкция средства обеспечения прижима ролика к диску обеспечивает более спрямленную динамометрическую характеристику /фиг. 3г/ действия прижимающей силы Fγ и маломеняющийся коэффициент Qд от пружины 27. Для улучшения этой характеристики устанавливается более одной пружины 27: менее жестких, но более емких /многовитковых/. Кроме того, при изменении величины угла перекоса диска 7, конструкция исключает радиальное перемещение ролика качения 13 по диску перекоса 7 и, следовательно, возникновения нежелательных поперечных сил трения, ухудшающих чувствительность МО.
КТСОС, как любая функциональная конструкция или прибор, имеет определенную степень чувствительности и, следовательно, точность ориентации на Солнце, зависящую от теплотехнических и механических параметров деталей и узлов конструкции, в т.ч. и от порога чувствительности МО системы. Порог чувствительности каждого МО определяется моментом начала или окончания процесса ориентации на Солнце при наличии наименьшей степени дезориентации, создающей минимальную величину перепада потенциала устойчивости на дуге дорожки качения ± Δi или угла дезориентации τ° в окрестности точки касания i с роликом качения 13 /фиг. 7а/: Δi = i′-i. Если принять т. i за 0o, на радиусе абсолютной ориентации на Солнце, а т. i'max=±180o, то погрешность степени ориентации, или степень дезориентации МО определяется по формуле
Физически порог чувствительности обусловлен суммарным значением сил трения Fтр в подшипниках конструкций МО /8, 9, 12, 13/ и самого ролика 13 по дорожке качения, противодействующих тангенциальной силе Fт /как векторной составляющей прижимающей силы Fγ /: в т. i Fт = 0, в т. i' F'т > 0. При Fтр ≥F'т, МО не работает, находясь в зоне нечувствительной дезориентации. Следовательно, уменьшая Fтр и увеличивая F'т повышается чувствительность каждого МО и точность ориентации КТСОС в целом.
Одним из вариантов увеличения F'т может быть применение конусной дорожки качения 24, показанной на фиг. 6 и фиг. 7б, 7в - за счет внутренней кривизны конусной поверхности, увеличивающей перепад потенциала устойчивости в окрестности т. i и, следовательно, повышающей F'т при том же Δi или τ°.
Повышения порога чувствительности МО по сравнению с предыдущими вариантами /фиг. 7а, 7б/ можно достичь применением в устройстве отслеживания угла наклона диска перекоса двух роликов качения. На фиг. 7 представлены схемы, для сравнения, применения одного ролика качения 13 на плоском диске перекоса 14 /фиг.7а), на конусной дорожке 24 /фиг. 7В/, двух роликов 13' и 13'' на конусной дорожке 24 /фиг. 7в/, при некоторой степени дезориентации МО на один и тот же угол. При этом, Fтк на фиг. 7в имеет наибольшую величину по сравнению с F'тi в вариантах фиг. 7а и 7б, так как ролик качения 13' в точке касания "к" отрабатывает угол дезориентации по дуге /к-i/ >>/i'-i/, при этом ролик 13'' может даже не касаться дорожки качения 24. Процесс восстановления ориентируемого положения МО в варианте фиг.7в завершится при прижатии обоих роликов качения 13' и 13'' к дорожке 24 каждого с силой Fтк/2.
Такой параметр работы КТСОС, как быстродействие - зависит от термодинамической инерционности ТЧЭ в конструкциях МО. Активизировать лучистый теплообмен ТЧЭ можно за счет включения в этот процесс тыльной стороны каждого ТЧЭ. На фиг. 8 представлена схема МО с экранирующей конструкцией 10, выполненной из продольных сегментов параболического профиля с зеркально отражающей рабочей поверхностью каждого. При этом экранирующая конструкция 10, так же как на фиг. 2, крепится одним торцом к основанию 5 и имеет направляющий пояс 15. Количество сегментов экранирующей конструкции равно количеству ТЧЭ в МО. Тыльная сторона каждого ТЧЭ может быть выполнена выпуклой с зачерненной поверхностью. На освещаемой Солнцем части МО, наружние зачерненные рабочие поверхности ТЧЭ нагреваются от направленных лучей Солнца с плотностью облучения, соответствующей их углу падения. Часть потока лучей попадает на соответствующий сегмент зеркальной поверхности экранирующей конструкции 10 и, отражаясь, поглощается тыльной стороной соответствующего ТЧЭ 6, увеличивая скорость нагревания ТЧЭ. В этом случае сегменты работают как дополнительные концентраторы солнечной энергии. На теневой части МО происходит обратный процесс остывания ТЧЭ 6 излучением в космическое пространство, при этом зеркальные поверхности сегментов выполняют функцию рассеивателей накопленного тепла ТЧЭ, исходящего от тыльной стороны ТЧЭ.
С целью более полного и практичного использования конструктивно объемных деталей МО, ориентируемые оси 2 могут использоваться как полезные емкости. При этом они выполняются герметичными, с устройствами сообщения с внутренней полостью, а также могут иметь больший объем за счет увеличения диаметра в пределах экранирующей конструкции 10, как изображено на фиг. 8, а также по длине в границах основания 5 и центрирующего колеса 11 /фиг. 2/ с обеспечением необходимых зазоров в этих границах для вращения.
Как ранее отмечалось, точность ориентации КТСОС зависит от суммарного значения сил трения Fтр в деталях МО, обеспечивающих вращательные сопряжения конструкции. По мере достижения ориентируемого положения системы, эти силы должны стремиться к 0. С другой стороны, наличие сил трения необходимо для разгрузки моментов вращения "статор-ротор", особенно при значительной раскрутки при большой степени дезориентации МО. Для обеспечения работы каждого МО в регулируемом режиме разгрузки, могут быть применены устройства, создающие дополнительные силы трения. На фиг. 9 представлена схема устройства отслеживания максимального угла перекоса диска перекоса 7 с одним роликом качения 13 на оси-водиле 14, снабженное разгрузочными роликами 28 и 28' на своих осях-водилах 29 и 29', расположенных симметрично от оси-водила 14. При этом, при ориентированном положении МО, разгрузочные ролики не касаются диска перекоса. При существенной дезориентации NO с возникновением несимметричного отклонения диска перекоса 7 относительно оси-водила 14, один из разгрузочных роликов /28/ прижимается к поверхности диска перекоса 7, создавая дополнительные силы трения. При отклонении МО в другую сторону от ориентируемого положения, в работе участвует другой разгрузочный ролик /28'/. Этот принцип может быть применен в схемах с конусной дорожкой качения и с двумя роликами качения. Кроме того, для простоты, на осях-водилах 29 и 29' могут быть установлены тормозные колодки на "плавающих" креплениях.
На фиг. 10 представлен вариант устройства с центробежным регулированием разгрузки. Устройство устанавливается на основании 5 МО и состоит по меньшей мере из двух узлов, расположенных симметрично ориентируемой оси 2. Каждый узел состоит из стойки 30 на основании 5 с кулачком 31, имеющей рычаг 32, и центробежную массу 33. Рычаги 32 каждого узла снабжены возвратной пружиной 34. Каждый узел имеет так же упругую стойку 35, на основании 5, с толкателем 36, имеющем тормозную колодку 37 на одном из концов. Свободный конец толкателя 36 имеет скользящее сопряжение с кулачком 31, а для предотвращения заклинивания - он снабжен цилиндром 38, регулировочным винтом 39, регулировочной шайбой 40 и регулировочной пружиной 41. При вращении "роторной" части МО с достаточной скоростью, центробежные массы 33 отклоняются от ориентируемой оси 2 к периферии и поворачивают кулачки 31 на некоторый угол относительно своих осей на стойках 30. При этом кулачки 31 своей рабочей поверхностью, с заданным рельефом, воздействуют на толкатели 36 и прижимают тормозные колодки 37 к ориентируемой оси 2. При помощи регулировочных деталей 38, 39, 40, 41, а так же позиционным креплением стоек 30 и 35, масс 33 устанавливается начало действия и величина тормозящих сил.
В конструкции каждого МО могут применяться ТЧЭ из твердого материала с большим удельным коэффициентом температурного удлинения.
Для создания более компактного МО, каждый ТЧЭ может состоять из нескольких полос такого материала, создающих большое результирующее температурное удлинение. На фиг. 11 показана конструкция ТЧЭ пакетного типа четырехступенчатой симметричной компоновки, состоящая из корпуса 42, термочувствительных полос 43 с большим коэффициентом α
Уменьшения габаритов и увеличения чувствительности МО можно достичь, применив в качестве рабочего тела ТЧЭ какого-либо газа или газовой смеси с большим коэффициентом температурного объемного расширения βт, который на несколько порядков больше линейного коэффициента твердых тел. На фиг. 12 представлена конструкция ТЧЭ с объемным расширением газа, состоящая из герметичной панели, имеющей внутренние сообщающиеся полости или ячеистую структуру, заполненные газом, с большим коэффициентом теплопроводности материала корпуса, с зачерненной поверхностью. Внутренний объем панели 48 соединен сообщающейся трубкой 50 с сильфоном 51 - исполнительным механизмом. Панель 48 снабжена заправочным штуцером 52 с обратным клапаном с контрольно-регулировочными функциями, деталями крепления 46, а сильфон 50 - рабочим органом 47, пружиной поддавливая 53 с устройством регулирования ее сжатия 54 и элементами крепления 55.
| название | год | авторы | номер документа |
|---|---|---|---|
| ТЕРМОМЕХАНИЧЕСКАЯ САМОНАВОДЯЩАЯСЯ СИСТЕМА СЛЕЖЕНИЯ ЗА СОЛНЦЕМ | 1993 |
|
RU2090777C1 |
| УСТРОЙСТВО ДЛЯ ОРИЕНТАЦИИ ПРИЕМНИКА СОЛНЕЧНОЙ ЭНЕРГИИ | 2012 |
|
RU2516595C2 |
| ЮВЕЛИРНОЕ ИЗДЕЛИЕ | 1996 |
|
RU2114543C1 |
| СПОСОБ РАЗГРУЗКИ СИСТЕМЫ СИЛОВЫХ ГИРОСКОПОВ КОСМИЧЕСКОГО АППАРАТА | 1991 |
|
RU2028256C1 |
| ЮВЕЛИРНОЕ ИЗДЕЛИЕ | 1992 |
|
RU2060708C1 |
| АВТОНОМНАЯ СИСТЕМА СЛЕЖЕНИЯ ЗА ПЕРЕМЕЩЕНИЕМ СОЛНЦА ПО НЕБОСВОДУ | 2006 |
|
RU2313046C2 |
| СПОСОБ И УСТРОЙСТВО СИСТЕМЫ ВОЛКОВА ДЛЯ ПРОИЗВОДСТВА ЭНЕРГИИ МЕТОДОМ "ПАРУСНОГО ЗАХВАТА" ВОЗДУШНЫХ ПОТОКОВ И СОЛНЕЧНЫХ ЛУЧЕЙ | 2009 |
|
RU2536648C2 |
| СПОСОБ ФОРМИРОВАНИЯ УПРАВЛЯЮЩИХ ВОЗДЕЙСТВИЙ НА КОСМИЧЕСКИЙ АППАРАТ С ФАЗИРОВАННОЙ АНТЕННОЙ РЕШЁТКОЙ | 2015 |
|
RU2604268C2 |
| МЕХАНИЗМ ОРИЕНТАЦИИ ДЛЯ СОЛНЕЧНОГО МОДУЛЯ С КОНЦЕНТРАТОРОМ | 2003 |
|
RU2243457C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ДЕФОРМАЦИИ КОРПУСА КОСМИЧЕСКОГО АППАРАТА В ПОЛЕТЕ | 2015 |
|
RU2605232C1 |
Изобретение относится к космической технике и может быть использовано как управляющее средство космических аппаратов, солнечных батарей, стабилизированных навигационных платформ и т.п. Предлагаемая система содержит термочувствительные элементы из материала с высоким коэффициэнтом температурного расширения, которые объединены в механизмы ориентации. Каждый механизм имеет ориентируемую ось и диск перекоса, кинематически связанный с этой осью и указанными элементами через ролик качения по диску. Механизмы крепятся к базис-модулю космического аппарата своими ориентируемыми осями. На базис-модулях устанавливаются технологические гелиоэлементы, ориентируемые на Солнце. При дезориентации системы относительно Солнца перераспределяются температуры нагрева термочувствительных элементов и перемещаются максимальные углы перекоса дисков соответствоответствующих механизмов. Вследствие этого ориентируемые оси приводятся во вращение (с противовращением остальной части механизмов), возвращая один или несколько базис-модулей в ориентированное на Солнце положение. Изобретение позволяет создать простую и компактную автономную систему ориентации на Солнце, работающую за счет непосредственного использования солнечной энергии. 16 з.п.ф-лы, 12 ил.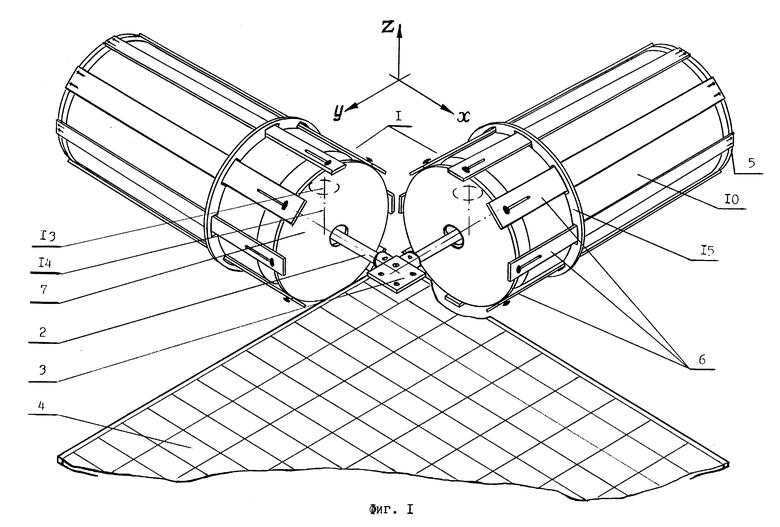
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| ТЕРМОМЕХАНИЧЕСКАЯ САМОНАВОДЯЩАЯСЯ СИСТЕМА СЛЕЖЕНИЯ ЗА СОЛНЦЕМ | 1993 |
|
RU2090777C1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| RU 2066287 C1, 10.09.96 | |||
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| УПЛОТНИТЕЛЬНЫЙ УЗЕЛ ТЕПЛОСИЛОВОЙ УСТАНОВКИ | 2018 |
|
RU2704515C1 |
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
| УСТРОЙСТВО ОБНАРУЖЕНИЯ ШУМОВЫХ ГИДРОАКУСТИЧЕСКИХ СИГНАЛОВ НА ОСНОВЕ КВАДРАТУРНОГО ПРИЕМНИКА | 2013 |
|
RU2550757C1 |
