Изобретение относится к способам управления движением космических аппаратов (КА) путем регулирования тяги, создаваемой давлением солнечного лучистого потока.
Известен способ формирования управляющих воздействий на КА (см. «Управление орбитой стационарного спутника», Г.М. Чернявский, В.А. Бартенев, В.А. Малышев, Москва, «Машиностроение», 1984 г., стр. 104-108) с использованием солнечного паруса. Способ включает в себя измерение единичного вектора направления на Солнце  , определение по нему и заданному приращению характеристической скорости КА
, определение по нему и заданному приращению характеристической скорости КА  , ориентированного относительно направления на Солнце, требуемого управляющего воздействия на КА. Формирование требуемого управляющего воздействия на КА в течение заданного времени путем раскрытия солнечного паруса в расчетный момент времени и поддержания требуемой его ориентации на Солнце. При этом направление формируемого управляющего воздействия противоположно направлению на Солнце.
, ориентированного относительно направления на Солнце, требуемого управляющего воздействия на КА. Формирование требуемого управляющего воздействия на КА в течение заданного времени путем раскрытия солнечного паруса в расчетный момент времени и поддержания требуемой его ориентации на Солнце. При этом направление формируемого управляющего воздействия противоположно направлению на Солнце.
Основной недостаток способа заключается в том, что для формирования управляющего воздействия используется солнечный парус, который утяжеляет конструкцию и усложняет систему управления движением КА.
Известен способ формирования управляющих воздействий на КА с использованием его рабочих поверхностей, предназначенных для приложения сил светового давления. В частности, в качестве рабочих, используются поверхности солнечных батарей (СБ) (см. патент RU 2207969).
Предлагаемый способ-прототип позволяет изменять направление действия силы относительно направления на Солнце за счет разворота СБ, что дает возможность непрерывно формировать управляющие воздействия и, следовательно, обеспечить большее изменение характеристической скорости в требуемом (трансверсальном) направлении.
Способ включает измерение единичного вектора направления на Солнце , определение по нему и заданному для расчетного момента времени приращению характеристической скорости космического аппарата, требуемого приложения силы  от светового давления на рабочую поверхность движителя космического аппарата, где α - угол поворота нормали
от светового давления на рабочую поверхность движителя космического аппарата, где α - угол поворота нормали  к рабочей поверхности движителя относительно проекции
к рабочей поверхности движителя относительно проекции  на орбитальную плоскость единичного вектора , исходя из условия выдачи максимального импульса силы в направлении вектора скорости
на орбитальную плоскость единичного вектора , исходя из условия выдачи максимального импульса силы в направлении вектора скорости

В предлагаемом способе для формирования управляющих воздействий используются рабочие поверхности СБ, что не требует наличия отдельного устройства солнечного паруса.
Основной недостаток способа заключается в том, что при формировании управляющих воздействий существует ограничение по углу разворота нормали к активной (рабочей) поверхности СБ относительно проекции  на орбитальную плоскость единичного вектора .
на орбитальную плоскость единичного вектора .
Ограничение связано с тем, что при выполнении разворота СБ, ток прихода должен всегда превышать ток нагрузки с учетом допустимого значения разницы тока прихода и потребления. Кроме того, тяга движителя, которым являются СБ, зависит от размеров батарей. В свою очередь размеры СБ определяются необходимым количеством устанавливаемых фотоэлектрических преобразователей солнечной энергии, что ограничивает величину используемой площади СБ, применяемой в качестве движителя.
Задачей изобретения является повышение эффективности формирования управляющих воздействий на КА за счет увеличения значения тяги движителя, получаемой в результате светового давления на рабочие поверхности крупногабаритных фазированных антенных решеток (ФАР), установленных на аппарате.
Для достижения указанного технического результата, в способе формирования управляющих воздействий на космический аппарат с фазированной антенной решеткой, включающем измерение единичного вектора направления на Солнце , определение по нему и заданному для расчетного момента времени приращению характеристической скорости космического аппарата, требуемого приложения силы от светового давления на рабочую поверхность движителя космического аппарата, где α - угол поворота нормали к рабочей поверхности движителя относительно проекции на орбитальную плоскость единичного вектора , исходя из условия выдачи максимального импульса силы в направлении вектора скорости , определяют площади si, нормали  и коэффициенты зеркального отражения ρi солнечного излучения отдельных рабочих поверхностей используемой в качестве движителя фазированной антенной решетки с общей нормалью , где i=1, 2, …, I - номера рабочих неоднородных поверхностей фазированной антенной решетки сложной конфигурации, определяют углы βi между нормалями и вектором , по определенным значениям , si, ρi, βi и измеренному значению , определяют силу
и коэффициенты зеркального отражения ρi солнечного излучения отдельных рабочих поверхностей используемой в качестве движителя фазированной антенной решетки с общей нормалью , где i=1, 2, …, I - номера рабочих неоднородных поверхностей фазированной антенной решетки сложной конфигурации, определяют углы βi между нормалями и вектором , по определенным значениям , si, ρi, βi и измеренному значению , определяют силу  , действующую на i-ю рабочую поверхность от давления поглощенного и отраженного света
, действующую на i-ю рабочую поверхность от давления поглощенного и отраженного света

где Lз - расстояние от Земли до Солнца, L - расстояние от космического аппарата до Солнца, Еc - плотность падающего излучения, c - скорость света, определяют на момент времени tf начала формирования управляющих воздействий значения силы , действующей на поверхность движителя, для углов α от 0° до 360° с учетом измеренного значения вектора , при этом значения силы определяют как сумму сил действующих на i-e рабочие поверхности, из полученных значений силы определяют значение  для угла αfmax, при котором производят выдачу максимального импульса силы от светового давления на движитель в направлении вектора скорости , производят построение ориентации космического аппарата к моменту времени tf с разворотом на величину угла αfmax, формируют управляющие воздействия на космический аппарат с использованием силы светового давления на рабочую поверхность движителя путем поддержания указанной ориентации в течение заданного интервала времени Δt до момента перехода космического аппарата к последующей ориентации, определяют на моменты времени tz=tf+zΔt, где z=1, 2, …, - номер интервала, значения углов разворота космического аппарата αzmax, при которых производят выдачу максимальных импульсов силы
для угла αfmax, при котором производят выдачу максимального импульса силы от светового давления на движитель в направлении вектора скорости , производят построение ориентации космического аппарата к моменту времени tf с разворотом на величину угла αfmax, формируют управляющие воздействия на космический аппарат с использованием силы светового давления на рабочую поверхность движителя путем поддержания указанной ориентации в течение заданного интервала времени Δt до момента перехода космического аппарата к последующей ориентации, определяют на моменты времени tz=tf+zΔt, где z=1, 2, …, - номер интервала, значения углов разворота космического аппарата αzmax, при которых производят выдачу максимальных импульсов силы  на интервалах времени Δt в указанном направлении вектора скорости, за счет последовательного построения ориентаций космического аппарата к моментам времени tz с разворотами на величину углов Δαzmax=αzmax-α(z-1)max до значений углов αzmax, при этом для z=1 α0max=αfmax, формируют управляющие воздействия на космический аппарат с использованием силы от светового давления, действующей на поверхность движителя, до получения приращения скорости , путем построения и поддержания требуемых ориентаций движителя на Солнце, при этом для каждого z-го интервала определяют значения углов αzmax с учетом изменения вектора .
на интервалах времени Δt в указанном направлении вектора скорости, за счет последовательного построения ориентаций космического аппарата к моментам времени tz с разворотами на величину углов Δαzmax=αzmax-α(z-1)max до значений углов αzmax, при этом для z=1 α0max=αfmax, формируют управляющие воздействия на космический аппарат с использованием силы от светового давления, действующей на поверхность движителя, до получения приращения скорости , путем построения и поддержания требуемых ориентаций движителя на Солнце, при этом для каждого z-го интервала определяют значения углов αzmax с учетом изменения вектора .
Суть предлагаемого способа заключается в использовании рабочих поверхностей крупногабаритных ФАР для управления движением КА, которые при солнечном облучении применяются в качестве движителя. В настоящее время плоские ФАР находят все большее применение для обеспечения персональной спутниковой связи, включая задачи ретрансляции сигналов персональной мобильной связи абонентского ствола и обмена специальной управляющей информацией с наземными средствами по магистральному стволу.
Как правило, перспективные ФАР имеют рабочие поверхности большой площади (150…250 м2). При этом режим функционирования ФАР не является постоянным. В программе полета существуют интервалы времени (например, при перелете КА с одной точки стояния на геостационарной орбите в другую) где выключенную ФАР предлагается использовать как рабочую поверхность для коррекции орбиты КА.
Известны основные расчетные выражения для давления поглощенного Pпог и отраженного Pотр света (см. «Солнечная энергия и космические полеты», В.А. Грилихес, П.П. Орлов, Л.Б. Попов, Москва, «Наука», 1984 г., стр. 156) на рабочую поверхность КА:


где ρ - коэффициент зеркального отражения;
ϑ - угол падения излучения на рабочую поверхность, °;
Lз - расстояние от Земли до Солнца, м;
L - расстояние от КА до Солнца, м;
Eс - плотность падающего излучения, Вт/м2;
c - скорость света, м/с.
Сила F, вызванная давлением P солнечного излучения на поверхность S, определяется по формуле:

Заявляемое решение иллюстрируется следующими материалами:
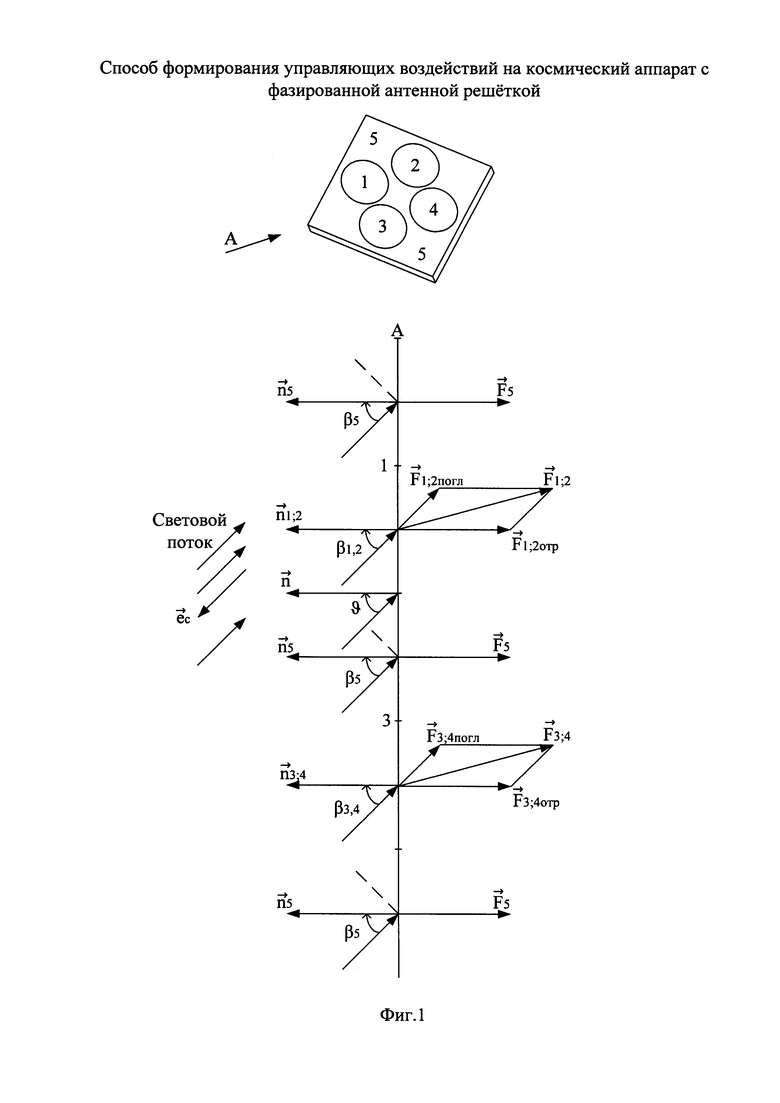
фиг. 1 - схема воздействия светового потока на поверхности плоского прямоугольного волновода ФАР с размещенными внутри него четырьмя дисковыми излучателями;
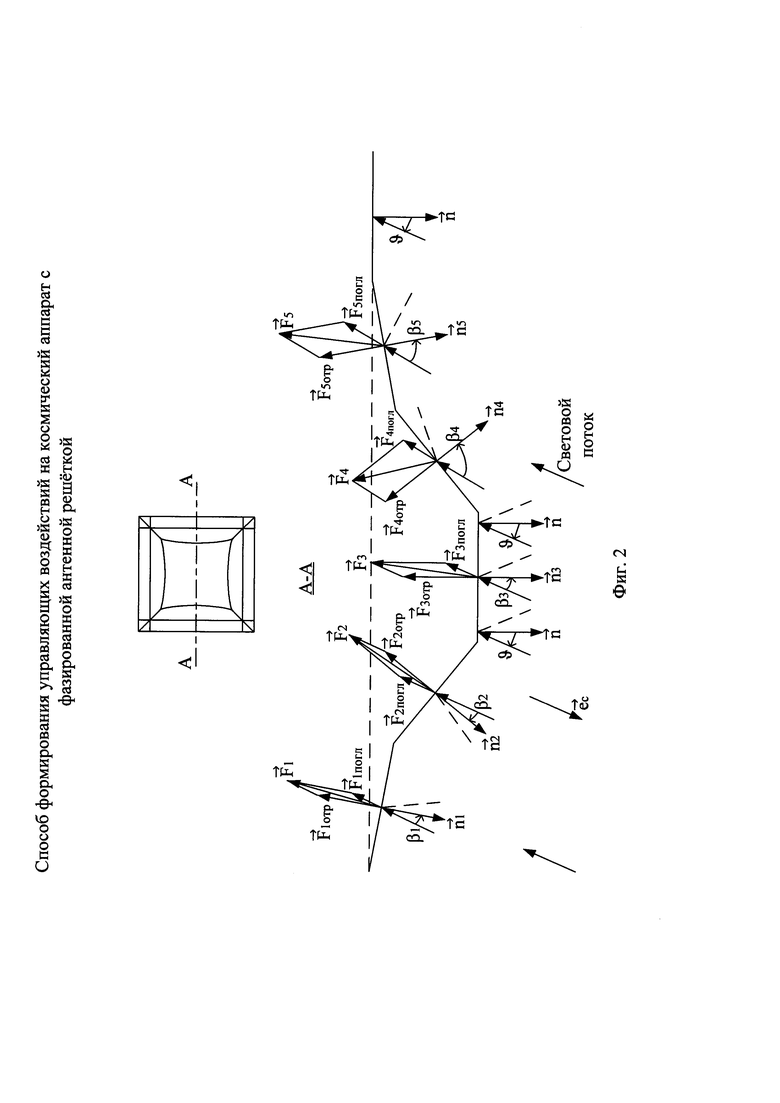
фиг. 2 - схема воздействия светового потока на поверхности волновода ФАР в виде четырехлучевой звезды, размещенной над проводящим экраном;
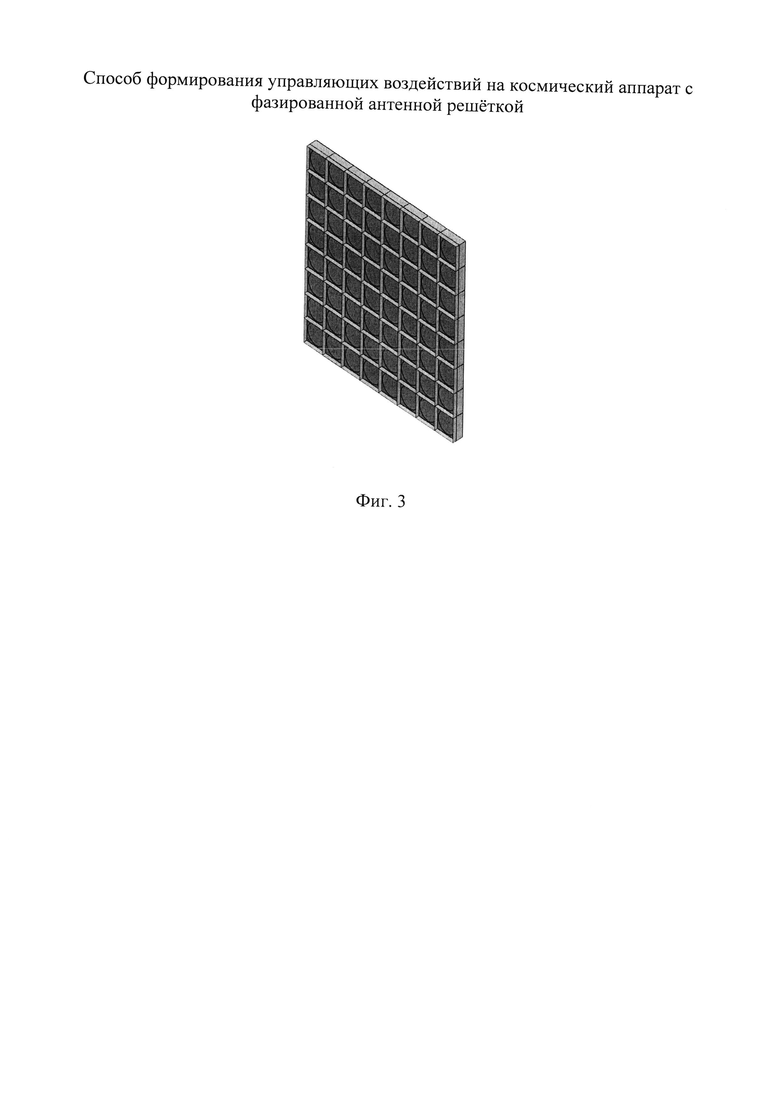
фиг. 3 - аксонометрическое изображение модуля ФАР;
фиг. 4 - схема использования ФАР как движителя КА;
фиг. 5 - схема бортового комплекса управления КА.
ФАР, как правило, содержит строительную плоскость, на которой размещается рабочая поверхность. Рабочая поверхность ФАР содержит излучатели с немеханическим движением луча в одной плоскости (см. «Антенны с электронным движением луча», О.Г. Вендик, М.Д. Парнес под редакцией Л.Д. Бахраха. С.-Петербург 2001). Круговая управляемая (переключаемая), левого или правого направления вращения поляризация излучения и приема сигналов может быть получена в системе ортогонально поляризованных излучателей с совмещенным фазовым центром. Примером такой системы является излучатель на основе плоского прямоугольного волновода с размещенными внутри него четырьмя дисковыми излучателями (см. фиг. 1), где указаны четыре излучателя (1…4), размещенные на корпусе волновода 5. Для описания схемы действия сил от светового давления, волновод рассматривается с торца, по направлению «A».
На фиг. 1 показана схема действия сил давления от светового потока на поверхность волновода с точки зрения наблюдения плоскости в указанном направлении, образованной общей нормалью к строительной плоскости и единичным вектором направления на Солнце . При этом введены обозначения нормалей  , к четырем дисковым излучателям и волноводу, совпадающим по направлению с общей нормалью , к рабочим поверхностям 1…5 (фиг. 1), имеющим в общем случае разные площади si и зеркальные коэффициенты отражения разные по величине ρi, i=1, 2, …, 5. Угол ϑ поворота общей нормали к рабочей поверхности относительно единичного вектора (угол падения излучения на рабочую поверхность ФАР), равен углам βi (i=1…5) между векторами
, к четырем дисковым излучателям и волноводу, совпадающим по направлению с общей нормалью , к рабочим поверхностям 1…5 (фиг. 1), имеющим в общем случае разные площади si и зеркальные коэффициенты отражения разные по величине ρi, i=1, 2, …, 5. Угол ϑ поворота общей нормали к рабочей поверхности относительно единичного вектора (угол падения излучения на рабочую поверхность ФАР), равен углам βi (i=1…5) между векторами  , . На фиг. 1 показано также действия сил давления от поглощенного
, . На фиг. 1 показано также действия сил давления от поглощенного  и отраженного
и отраженного  света, а также суммарного действия указанных векторов
света, а также суммарного действия указанных векторов  .
.
В другом варианте излучатель представляет собой металлическую пластину в виде четырехлучевой звезды, размещенную над проводящим экраном. Возбуждение излучателя производится в вершинах ее лучей. При этом вершины лучей, расположенных на одной диагонали, возбуждаются противофазными сигналами. Сигналы возбуждения вершин, расположенных на разных диагоналях, имеют сдвиг по фазе на 90°. Переключая возбуждающие сигналы между диагоналями можно изменять направление вращения круговой поляризации.
На фиг. 2 представлена схема излучателя в виде указанной звезды, изготовленного из однородного материала (ρ=const). При этом для рассмотрения схемы действия сил от светового давления указано сечение А-А излучателя. На схеме (см. фиг. 2) к строительной плоскости установки излучателя проведена нормаль , которая не совпадает с нормалями  и
и  , проведенными к граням четырехлучевой звезды и совпадает с нормалью к верхней плоскости звезды
, проведенными к граням четырехлучевой звезды и совпадает с нормалью к верхней плоскости звезды  . Следовательно, не все углы βi равны углу ϑ (за исключением β3). В соответствии с введенными обозначениями, показаны значения векторов
. Следовательно, не все углы βi равны углу ϑ (за исключением β3). В соответствии с введенными обозначениями, показаны значения векторов  с учетом направлений действия сил давления поглощенного
с учетом направлений действия сил давления поглощенного  и отраженного
и отраженного  излучения. По известным геометрическим параметрам формы излучателя, определяются площади поверхностей si и углы βi между векторами и .
излучения. По известным геометрическим параметрам формы излучателя, определяются площади поверхностей si и углы βi между векторами и .
Необходимо также отметить, что не вся поверхность ФАР покрыта излучателями, имеются также участки поверхности под конструктивные элементы крепления решеток и фидеры питания. На фиг. 3 представлен модуль, являющийся элементом приемо-передающей ФАР. В состав модуля входят 64 излучателя, установленных в определенную конструктивную раму.
При этом возможны варианты изготовления излучателей разной формы из различного материала. Следовательно, рабочая структура ФАР, с учетом конструктивного оформления, представляет собой неоднородную поверхность сложной конфигурации.
С учетом выражений (2)-(4), определяется в общем виде сила , действующая на i-ю рабочую поверхность фазированной антенной решетки, представленная в формуле изобретения



Из набора указанных модулей (см. фиг. 3), а также конструктивного их оформления, производится построение панелей ФАР, из которых, в свою очередь строится вся рабочая поверхность решетки. Тогда значение силы движителя от светового давления на рабочую поверхность ФАР в целом определяется по выражению (5), как сумма сил

действующих на i-e рабочие поверхности решетки, разнящихся своими коэффициентами ρi, площадями si и находящихся в разных условиях облучения, определяемых углами βi, при одном угле ϑ падения излучения на рабочую поверхность ФАР в целом.
При этом взаимное затенение поверхностей и их затенение внешними элементами конструкции не рассматриваются.
С учетом числа однотипных излучателей в модуле (k=64) (см. например, фиг. 1, 3), числа модулей в панелях ФАР (1) и общего числа панелей ФАР (m), без учета остальных конструктивных элементов, значение тяговой силы движителя определяется по выражению

Значения, от которых зависят действия сил и , являются переменными величинами:
βi - зависят от изменяющегося во времени единичного вектора направления на Солнце каждой отдельной рабочей поверхности, определенной своей нормалью;
ρi - зависят от изменения поглощательной способности материала в результате его «старения»;
si - зависят от высоты и формы излучателей, размещенных на строительной плоскости ФАР.
В заявке рассматривается управления силой за счет изменения ориентации ФАР, прикрепленной к КА, на Солнце, т.е за счет изменения освещенности отдельных рабочих поверхностей решетки. Значения и si являются исходно определенными неизменными величинами, а значения ρi периодически уточняются в расчетах, при этом на текущий момент времени считаются величинами постоянными.
Для объяснения сути технического решения, заключающегося в использовании ФАР как движителя КА, представлена фиг. 4, на которой введены обозначения: 6 - ФАР КА; 7 - геостационарная орбита (ГСО) КА; 8 - Земля; 9 - направление светового потока; 10 - расположение ФАР в орбитальный «полдень» (совпадение векторов и в начальный момент времени t0=0 и α=0).
Обозначения базисов: связанного 0XYZ; орбитального 0X0Y0Z0 (ОСК); абсолютного инерциального 0XγYγZγ (ИСК).  - вектор орбитальной угловой скорости КА. - вектор приращения характеристической скорости КА. αc - угол между направлением светового потока и плоскостью орбиты. - проекция вектора на плоскость орбиты. α - угол поворота нормали к рабочей поверхности движителя относительно проекции . P - орбитальный «полдень» на поверхности ФАР.
- вектор орбитальной угловой скорости КА. - вектор приращения характеристической скорости КА. αc - угол между направлением светового потока и плоскостью орбиты. - проекция вектора на плоскость орбиты. α - угол поворота нормали к рабочей поверхности движителя относительно проекции . P - орбитальный «полдень» на поверхности ФАР.
В процессе штатной работы ФАР, КА находится в орбитальной ориентации. При этом нормаль к рабочей поверхности ФАР совпадает с направлением оси 0Х связанного базиса, а СБ могут постоянно ориентироваться на Солнце, так как их ось вращения перпендикулярна плоскости орбиты.
Предлагается проведение, с использованием ФАР как движителя, трансверсального маневра, при этом вектор находится в плоскости орбиты и всегда направлен вдоль оси 0Y0. Таким образом, необходимо произвести построение ориентации КА с определенным разворотом, обеспечивающим освещенность ФАР Солнцем и создании при этом максимально возможной тяговой силы в точке ее приложения на орбите.
Алгоритм определения угла разворота и управления КА нижеследующий.
Определяем в ИСК (γ) по выражениям (5), (6), на момент времени tf начала формирования управляющих воздействий, значения силы  для углов αγj. При этом значения углов j задаются от 0° до 360°, в расчетах используем значение вектора на момент времени tf и значения нормали
для углов αγj. При этом значения углов j задаются от 0° до 360°, в расчетах используем значение вектора на момент времени tf и значения нормали  .
.
Определяем скалярные произведение векторов  для углов αγj от 0° до 360°, где
для углов αγj от 0° до 360°, где  значение вектора
значение вектора  в ИСК на момент времени tf.
в ИСК на момент времени tf.
Из полученных значений, по выполнению условия (1), выбираем  , присваиваем значению силы максимальное значение
, присваиваем значению силы максимальное значение  и выбираем соответствующее ей максимальное значение угла (αγj)max=αfmaxγ.
и выбираем соответствующее ей максимальное значение угла (αγj)max=αfmaxγ.
Определяем значение угла разворота КА, соответствующего значению силы  в ОСК к моменту времени tf:
в ОСК к моменту времени tf:  , где Δτ=tf-t0, t0 - момент времени совпадения векторов и при поддержании инерциальной ориентации космического аппарата (орбитальный «полдень» на поверхности ФАР, см. фиг. 4).
, где Δτ=tf-t0, t0 - момент времени совпадения векторов и при поддержании инерциальной ориентации космического аппарата (орбитальный «полдень» на поверхности ФАР, см. фиг. 4).
Производим построение орбитальной ориентации КА к моменту времени tf с разворотом из ОСК по тангажу на величину угла αfmax.
Формируем управляющие воздействия на КА с использованием силы от светового давления на поверхность движителя путем поддержания его ориентации на Солнце при угле разворота по тангажу αfmax в течение интервала времени Δt - оценки обеспечения требуемой ориентации на проведение маневра с учетом выполнения условия (1). Значение Δt задается по результатам моделирования процесса для конкретного КА, содержащего исполнительные органы системы ориентации (например, силовые гироскопы) и включает в себя продолжительность времени на определение и осуществление очередной ориентации, с учетом того, что абсолютное выполнение условия (1) возможно в одной точке орбиты. При этом, чем больше продолжительность Δt, тем больше отклонение от выдачи максимально возможного (идеального) импульса, определяемого для каждой точки орбиты исходя из выполнения условия (1).
Начиная с момента времени tf, в интервалах zΔt, где z=1, 2, … - номер интервала, определяем в ИСК значения  и скалярное произведение векторов
и скалярное произведение векторов  для углов αγj от 0° до 360° на моменты времени tz=tf+zΔt, при этом учитываем текущие изменения вектора .
для углов αγj от 0° до 360° на моменты времени tz=tf+zΔt, при этом учитываем текущие изменения вектора .
Из полученных значений, по выполнению условия (1), выбираем  , присваиваем значению силы
, присваиваем значению силы  максимальное значение
максимальное значение  и выбираем соответствующее ей максимальное значение угла (αγj)z:=αzmaxγ.
и выбираем соответствующее ей максимальное значение угла (αγj)z:=αzmaxγ.
Определяем значения углов разворота КА по тангажу αzmax, соответствующих максимальным значениям импульсов силы  на интервалах времени Δt в заданном направлении вектора скорости, в ОСК к моменту времени
на интервалах времени Δt в заданном направлении вектора скорости, в ОСК к моменту времени  .
.
Производим построение ориентации КА к моменту времени tz путем его разворота в ОСК по тангажу на величину угла Δαzmax=αzmax-α(z-1)max до определенного угла αzmax, при этом для z=1, α0max=αfmax.
Формируем управляющие воздействия на КА с использованием силы от светового давления на поверхность движителя путем построения и поддержания его ориентации на Солнце на z-x интервалах продолжительностью Δt, при этом на каждом интервале z, определяем для поддержания ориентации значения углов αzmax с учетом изменения вектора .
Формирование управляющих воздействий прекращаем после приращения значения характеристической скорости КА до заданного значения .
Реализация предложенного способа может быть выполнена при помощи бортового комплекса управления (БКУ) КА, построенного на принципах сетевых бортовых вычислительных систем (Е.А. Микрин. Бортовые комплексы управления космическими аппаратами и проектирование их программного обеспечения. М.: Изд. МГТУ им. Н.Э. Баумана. 2003). На фиг. 5 представлены основные элементы структурной схемы БКУ, взаимодействующие с наземным комплексом управления (НКУ) КА, необходимо достаточные для реализации способа, при этом введены обозначения:
11 - НКУ;
12 - бортовая аппаратура служебного канала управления (БА СКУ);
13 - система управления бортовой аппаратурой (СУБА);
14 - бортовая цифровая вычислительная система (БЦВС);
15 - система управления движением (СУД);
16 - гироскопический измеритель вектора угловой скорости (ГИВУС);
17 - комплект силовых гироскопов (КСГ);
18 - блок определения координат звезд (БОКЗ);
19 - блок определения координат Солнца (БОКС);
20 - устройство сопряжения (УС);
21 - цифровая вычислительная машина (ЦВМ).
МКО - мультиплексный канал обмена.
БА СКУ 12 обеспечивает канал телеуправления КА от НКУ 11, канал передачи телеметрической информации и ретрансляцию сигналов радиоконтроля орбиты. Основой структуры БКУ является БЦВС 14 (фиг. 5) с модульно-магистральной архитектурой, включающей в себя резервированные УС 20 и ЦВМ 21 (см. фиг. 5). В состав СУБА 13 включен комплекс коммутаторов для распределения электропитания бортовым потребителям и электронный блок преобразования и управления для решения задач командного управления и уплотнения сигнальной информации.
В структуре БКУ СУД 15 представлена датчиковой аппаратурой (ГИВУС 16; БОКЗ 18; БОКС 19) и исполнительными органами КСГ 17 (фиг. 5). Интеграция перечисленных систем в единый управляющий комплекс, представленная на фиг. 5 в виде функциональных взаимосвязей, осуществляется средствами программного обеспечения (ПО) БКУ, размещаемого в УС 20 и ЦВМ 21.
В рамках предлагаемого решения задачи, СУД 15 производит построение и поддержание ориентации КА в ОСК и ИСК с требуемой точностью по углу и угловой скорости, а также проведения коррекции орбиты КА, включая его увод с рабочей орбиты по завершению срока эксплуатации. Система построена по принципу корректируемой бесплатформенной инерциальной системы (БИС). Путем интегрирования составляющих абсолютной угловой скорости, измеряемой ГИВУС 16, БИС вычисляет положение связанных осей КА относительно инерциального базиса. Программные средства БИС входят в состав ПО БКУ. Периодическая коррекция БИС осуществляется с использованием БОКЗ 18, измеряющих отклонение КА относительно звезд.
БОКС 19 является оптико-электронным прибором статического типа, предназначенным для определения направления на центр Солнца в приборной системе координат. ПО БКУ производит перевод полученного вектора направления на Солнце с приборного в связанный с КА и инерциальный базисы. КСГ 17 предназначен для создания управляющих моментов, воздействующих на КА в режимах угловой стабилизации и программных поворотов.
Решается задача следующим образом. Из НКУ 11, через БА СКУ 12 в БЦВС 14 выдается команда на начало режима коррекции орбиты с использованием ФАР. Закладывается также в БЦВС расчетный программный массив, определяющий продолжительность режима. При этом указанная продолжительность обеспечивает получение заданного значения вектора . Изначально КА находится в расчетной орбитальной ориентации, построенной с использованием принципов БИС (см. описание прототипа, стр. 10-12). По указанной команде ЦВМ 11 производит взаимодействие по МКО с БОКС 19, в результате которого получает измеренные значения единичного вектора . С использованием известных значений векторов, ПО БКУ, работающее по вышеописанному алгоритму определения угла разворота и управления КА, производит определение первоначального и последующих углов разворота КА. Для расчета используются исходные данные, характеризующие рабочую поверхность ФАР и определяющие ее положение в связанном базисе КА. Во всех динамических режимах управление угловым движением КА производится с использованием КСГ 17.
С целью оценки эффективности применения предложенного способа производился примерный расчет коррекции орбиты КА с ФАР на ГСО в точке стояния 80° В.Д. в сутки весеннего равноденствия 21.03.2014 г (при αс=0). Исходные данные: излучатель на основе плоского прямоугольного волновода (фиг. 1), ρ1=ρ2=ρ3=ρ4=0,84, ρ5=1; общая площадь рабочей поверхности ФАР - 250 м2, при этом ~35% от общей площади занимает поверхность с коэффициентом отражения ρ5=1. Продолжительность интервала поддержания ориентации между разворотами КА Δt=120 с.
В результате получено суточное суммарное значение импульса силы от светового давления на поверхность движителя ~50 кг·м/с. При массе КА 4000 кг, приращение характеристической скорости ΔV~0,013 м/с.
Таким образом, предлагаемое техническое решение позволяет производить коррекцию орбиты КА по долготе без затрат рабочего тела реактивных двигателей на интервалах неработающей ФАР по своему прямому функциональному назначению.


Способ формирования управляющих воздействий на космический аппарат включает в себя определение силы, действующей на рабочую поверхность от давления поглощённого и отражённого света. Также способ включает в себя определение момента времени формирования управляющих воздействий значения силы. На основании определённых данных производят построение ориентации космического аппарата. Формируют управляющее воздействие на космический аппарат с использованием силы светового давления на рабочую поверхность движителя до получения приращения скорости путём построения и поддержания требуемых ориентаций движителя на Солнце. Технический результат заключается в повышении эффективности формирования управляющих воздействий на космическом аппарате за счёт увеличения значения тяги движителя, получаемой в результате светового давления на рабочие поверхности крупногабаритных фазированных антенных решёток, установленных на аппарате. 5 ил.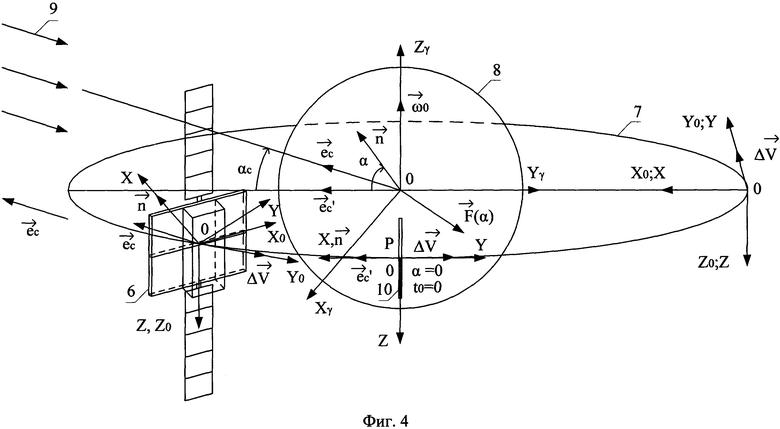
Способ формирования управляющих воздействий на космический аппарат с фазированной антенной решеткой, включающий измерение единичного вектора направления на Солнце  , определение по нему и заданному для расчетного момента времени приращению характеристической скорости
, определение по нему и заданному для расчетного момента времени приращению характеристической скорости  космического аппарата, требуемого приложения силы
космического аппарата, требуемого приложения силы  от светового давления на рабочую поверхность движителя космического аппарата, где α - угол поворота нормали
от светового давления на рабочую поверхность движителя космического аппарата, где α - угол поворота нормали  к рабочей поверхности движителя относительно проекции
к рабочей поверхности движителя относительно проекции  на орбитальную плоскость единичного вектора
на орбитальную плоскость единичного вектора  , исходя из условия выдачи максимального импульса силы в направлении вектора скорости
, исходя из условия выдачи максимального импульса силы в направлении вектора скорости  , отличающийся тем, что определяют площади si, нормали
, отличающийся тем, что определяют площади si, нормали  и коэффициенты зеркального отражения ρi солнечного излучения отдельных рабочих поверхностей используемой в качестве движителя фазированной антенной решетки с общей нормалью
и коэффициенты зеркального отражения ρi солнечного излучения отдельных рабочих поверхностей используемой в качестве движителя фазированной антенной решетки с общей нормалью  , где i=1, 2,…, I - номера рабочих неоднородных поверхностей фазированной антенной решетки сложной конфигурации, определяют углы βi между нормалями
, где i=1, 2,…, I - номера рабочих неоднородных поверхностей фазированной антенной решетки сложной конфигурации, определяют углы βi между нормалями  и вектором
и вектором  , по определенным значениям
, по определенным значениям  , si, ρi, βi и измеренному значению
, si, ρi, βi и измеренному значению  , определяют силу
, определяют силу  , действующую на i-ю рабочую поверхность от давления поглощенного и отраженного света
, действующую на i-ю рабочую поверхность от давления поглощенного и отраженного света

где Lз - расстояние от Земли до Солнца, L - расстояние от космического аппарата до Солнца, Ес - плотность падающего излучения, с - скорость света,
определяют на момент времени tf начало формирования управляющих воздействий значения силы  , действующей на поверхность движителя, для углов α от 0° до 360° с учетом измеренного значения вектора
, действующей на поверхность движителя, для углов α от 0° до 360° с учетом измеренного значения вектора  , при этом значения силы
, при этом значения силы  определяют как сумму сил, действующих на i-e рабочие поверхности, из полученных значений силы определяют значение
определяют как сумму сил, действующих на i-e рабочие поверхности, из полученных значений силы определяют значение  для угла αfmax, при котором производят выдачу максимального импульса силы от светового давления на движитель в направлении вектора скорости
для угла αfmax, при котором производят выдачу максимального импульса силы от светового давления на движитель в направлении вектора скорости  , производят построение ориентации космического аппарата к моменту времени tf с разворотом на величину угла αfmax, формируют управляющие воздействия на космический аппарат с использованием силы светового давления на рабочую поверхность движителя путем поддержания указанной ориентации в течение заданного интервала времени Δt до момента перехода космического аппарата к последующей ориентации, определяют на моменты времени tz=tf+zΔt, где z=1,2,…, - номер интервала, значения углов разворота космического аппарата αzmax, при которых производят выдачу максимальных импульсов силы
, производят построение ориентации космического аппарата к моменту времени tf с разворотом на величину угла αfmax, формируют управляющие воздействия на космический аппарат с использованием силы светового давления на рабочую поверхность движителя путем поддержания указанной ориентации в течение заданного интервала времени Δt до момента перехода космического аппарата к последующей ориентации, определяют на моменты времени tz=tf+zΔt, где z=1,2,…, - номер интервала, значения углов разворота космического аппарата αzmax, при которых производят выдачу максимальных импульсов силы  на интервалах времени Δt в указанном направлении вектора скорости, за счет последовательного построения ориентаций космического аппарата к моментам времени tz с разворотами на величину углов Δαzmax=αzmax-α(z-1)max до значений углов αzmax, при этом для z=1 α0max=αfmax, формируют управляющие воздействия на космический аппарат с использованием силы от светового давления, действующей на поверхность движителя, до получения приращения скорости
на интервалах времени Δt в указанном направлении вектора скорости, за счет последовательного построения ориентаций космического аппарата к моментам времени tz с разворотами на величину углов Δαzmax=αzmax-α(z-1)max до значений углов αzmax, при этом для z=1 α0max=αfmax, формируют управляющие воздействия на космический аппарат с использованием силы от светового давления, действующей на поверхность движителя, до получения приращения скорости  путем построения и поддержания требуемых ориентаций движителя на Солнце, при этом для каждого z-го интервала определяют значения углов αzmax с учетом изменения вектора
путем построения и поддержания требуемых ориентаций движителя на Солнце, при этом для каждого z-го интервала определяют значения углов αzmax с учетом изменения вектора  .
.
| СПОСОБ ФОРМИРОВАНИЯ УПРАВЛЯЮЩИХ ВОЗДЕЙСТВИЙ НА КОСМИЧЕСКИЙ АППАРАТ С СИЛОВЫМИ ГИРОСКОПАМИ И ПОВОРОТНЫМИ СОЛНЕЧНЫМИ БАТАРЕЯМИ | 2001 |
|
RU2207969C2 |
| УСТРОЙСТВО ДЛЯ ОРИЕНТАЦИИ КОСМИЧЕСКОГО АППАРАТА | 1991 |
|
RU2021170C1 |
| JP 2003013078 A 15.01.2003 | |||
| US 6189835 B1 20.02.2001. | |||

