Изобретение относится к области гидроакустики и может быть использовано для создания локальных региональных и глобальных акустических систем долговременного контроля вдоль трасс распространения звука таких параметров морской среды как средняя температура вод и ее изменчивость, проекции на трассу скорости течения, наличия на трассе гидрофизических неоднородностей, льда, движения рыбных скоплений, прохождения судов и т.п.
Известны способы акустического мониторинга изменчивости параметров морских акваторий, систематизированных в журнале [1] и статье [2], которые можно свети к двум основным группам:
- монохроматические, в которых излучается и принимается тонально-импульсный сигнал на заранее выбранной частоте и осуществляется измерение времени распространения этого сигнала на трассе либо по фронту импульса, либо по фазе несущей;
- широкополосные, например, когда излучают и принимают линейно-частотно модулированный сигнал [2] для спектроскопии временных задержек или псевдослучайный сигнал в виде фазоманипулированной M-последовательности с определением времени распространения по корреляционной функции между принятым и излученным сигналами.
Общими признаками известных способов [1, 2] акустического мониторинга являются формирование в морской среде акустической приемно-излучающей трассовой схемы и обработка принятого приемным элементом трассовой схемы акустического сигнала, прошедшего трассу распространения звука.
Любой из известных способов может быть принят за прототип, например, способ описанный в работе [3] из журнала [1].
Недостатками известных способов акустического мониторинга являются необходимость излучения больших акустических мощностей для их реализации для получения требуемой точности измерений [2].
Техническим результатом, получаемым от внедрения изобретения, является значительное снижение требуемой мощности излучения для реализации способа, упрощение схемы реализации способа и повышение точности измерений при меньших временных реализациях обработки сигнала за счет самоадаптации автогенератора к условиям распространения звука на трассе.
Данный технический результат достигается за счет того, что в известном способе акустического мониторинга изменчивости параметров морских акваторий, заключающемся в формировании в морской среде акустической приемно-излучающей трассовой схемы и обработке принятого приемным элементом трассовой схемы акустического сигнала, прошедшего трассу распространения звука схемы, принятый приемным элементом трассовой схемы сигнал подают на излучающую сторону трассы и нелинейно усиливают до появления режима автогенерации в трассовой схеме на одной из частот, определяемой гидрофизическими условиями на трассе распространения звука, затем измеряют частоту автогенерации в трассовой схеме, по значению которой судят об изменениях параметров морской среды.
В частном случае формирования режима автогенерации трассовой схемы через морскую среду проводят в двух направлениях: прямом и обратном.
При этом в трассе распространения звука могут выделить требуемую группу лучей (мод), а режим автогенерации трассовой схемы возбудить при использовании выделенный лучей (мод), при этом в качестве приемного элемента используют вертикально ориентированную гидроакустическую антенну.
При обработке принятого приемным элементом трассовой схемы акустического сигнала анализируют спектры изменчивости частоты автогенерации, по которым судят о природе изменчивости гидрофизических параметров морской среды.
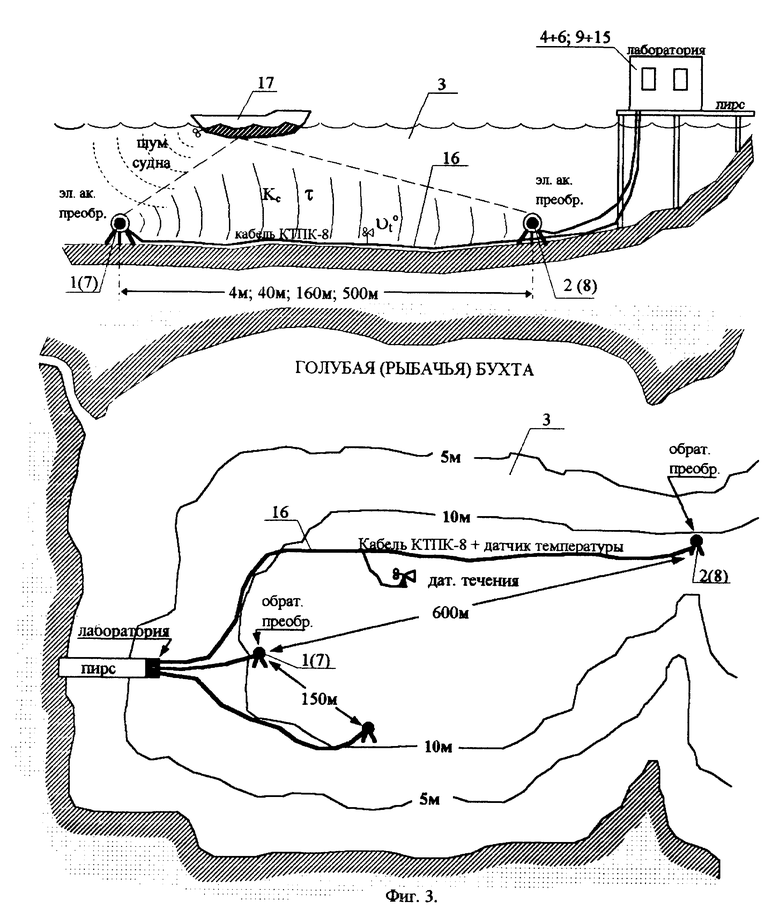
Изобретение поясняется чертежом. На фиг. 1, 2 представлены схемы реализации способа соответственно по пунктам 1 и 2 формулы изобретения; на фиг. 3 - схема реализации способа в Голубой бухте на шельфе Черного моря; на фиг. 4 - спектральные диаграммы, поясняющие существо способа.
Методика реализуется в приборе, названном авторами гидроакустическим автогенератором, особенностью которого является то, что среда (звуковой канал) входит в состав прибора и используется в качестве петли обратной связи автогенератора. Схема реализации может быть односторонней (фиг. 1) и включать необходимые преобразователи или реверсивной - с обратимыми преобразователями (фиг. 2).
Второй вариант схемы позволяет дополнительно измерять скорости морских течений.
Схема (фиг. 1) включает в себя гидроакустический излучатель 1 и гидроакустический приемник (приемный элемент) 2, расположенные на определенном расстоянии друг от друга в морской акватории 3. Имеются также последовательно соединенные нелинейный элемент 4, полосовой усилитель 5 и измеритель 6 частоты.
Гидроакустические излучатель 1 и приемник 2 в схеме на фиг. 1 могут быть необратимыми.
В схему с обратимыми гидроакустическими преобразователями 7, 8 (фиг. 2) добавляются дополнительные полосовой усилитель 9 и нелинейный элемент 10, а также два согласующих устройства 11, 12, два переключателя 13, 14, управляющее устройство 15 и линия связи 16. (на фиг. 1 линия связи не показана) Схема соединения электронных блоков представлена на фиг. 1 и 2.
В реальных условиях моря схема, реализующая способ, представлена на фиг. 3.
Представленные на фиг. 1 - 3 элементы формируют в морской среде акустическую приемно-излучающую трассовую схему, работающую в режиме автогенерации или только в прямом (фиг. 1), или последовательно в прямом и обратном направлениях (фиг. 2).
Схема автогенератора с акустической обратной связью в подводном звуковом канале может быть отнесена к классу самоадаптирующихся к среде систем морского мониторинга. При этом частота и амплитуда генерируемых колебаний определяется акустическими характеристиками трассы (включая собственные шумы акватории 3).
Чувствительность автогенератора к параметрам среды обусловлена тем, что положительная обратная связь в схеме осуществляется через излучение разнесенными в пространстве гидроакустическими излучателем 1 (7) и приемником 2 (8). Работа автогенератора сродни известному явлению "микрофонного эффекта", возникающему в помещениях, охваченных системой звукоусиления, или в слуховых аппаратах при превышении предельно допустимого усиления.
Пояснить работу автогенератора можно следующим образом. Пусть, например, шум океана, принимаемый приемником 2 (8) (гидрофоном с чувствительностью En) усиливается полосовым усилителем 5 с коэффициентом передачи Kэ, зависимым от величины звукового давления (поскольку нелинейный элемент 4 делает усилитель 5 нелинейным) и от частоты, определяемой протяженностью трассы (частоты положительной обратной связи) и интерференцией в точке приема.
Усиленный шум Pшум поступает на излучатель 1 (7) с чувствительностью Eн и, пройдя среду морской акватории 3 с потерями Kс и временем распространения звука τ, вновь принимается приемником 2 (8). Очевидно, что Kс - комплексная величина в том числе за счет многолучевости распространения звука (фиг. 2 лучи а, б, . ..n), а акустическая трасса представляет собой цепь обратной связи, которая оказывается положительной лишь для гребенки мод (фиг. 4а), следующих через 2π, в которой соседние частоты разнесены на величину c/l, где c - скорость звука, l - длина трассы. При петлевом (суммарном) коэффициенте передачи M меньше 1, система устойчива и автогенерация не возникает. Однако при этом спектр шума модифицируется и в нем возникают пики (фиг. 4а), подчеркивающие ряд частот, на которых обратная связь - положительна.
Чем ближе M к 1, тем выше амплитуда этих пиков и тем больше их добротность (фиг. 4б). При M=1 в схеме возникает автогенерация на одной из частот (фиг. 4в), где положительная обратная связь и где наблюдается интерференционный максимум для акустической трассы с многолучевым распространением звука. Частота автогенерации и положение максимумов в гребенке пиков модифицированного спектра шума (M<1) зависит от времени распространения сигнала вдоль трассы, а, следовательно, от температуры воды, от скорости течения и от стабильности интерференционной структуры акустического поля в точке приема.
Таким образом, автогенераторная система акустического мониторинга пригодна для:
- измерения изменчивости акустической (волновой) дистанции, обусловленной колебаниями температуры по изменению времени распространения сигнала (фиг. 4д);
- обнаружения изменений интерференционной структуры в акустическом волноводе, обусловленных динамикой неоднородностей в среде (приливы, внутренние волны, боры и т.п.) или движением объектов (косяки рыб, подводное, надводное судно) вследствие нарушения стратификации среды, а также из-за дифракционных эффектов, возникающих на объектах и в случае повышения уровня шума в окрестности приемника 2 (например, на фиг. 3 объектом исследований является судно 17);
- измерение проекции скорости течений на трассу (фиг. 4г) путем сравнения рабочих частот автогенератора вдоль (П) и против (О) течения (в этом случае используется конвертируемая схема на фиг. 2 с обратимыми приемно-излучающими преобразователями 7, 8).
Работа автогенераторной схемы, реализующей способ, чрезвычайно проста. Включают излучатель 1 (7) на определенной частоте (фиг. 1, 2). Акустическая волна проходит акустическую трассу морской акватории 3 до приемника 2, на который одновременно воздействуют контролируемые факторы, например, сигнал, рассеянный судном 17 (фиг. 3). Контролируемый шум усиливается в блоках 4, 5 и вновь поступает на излучатель 1 (7). При этом схема сама настраивается на автогенераторный режим на частоте, величина которой характеризует контролируемый параметр в среде. Частота измеряется измерителем 6 частоты.
Если контролируемым параметром является скорость течения среды, то управляющее устройство 15 (фиг. 2) последовательно переключает все элементы схемы с прямого на обратный. И работа схемы повторяется то в одном, то в обратном направлениях.
Автогенератор всегда самостоятельно настраивается на частоту, соответствующую интерференционному максимуму (на частоту минимальных потерь). Именно поэтому необходимая для самовозбуждения мощность оказывается минимальной. Автогенератор в случае применения в качестве приемника 2 вертикальной антенны также автоматически выберет тот луч (моду) звукового поля, которая переносит наибольшую энергию.
Таким образом, вводя распределение (фазовые или амплитудные) по апертуре антенны можно, возбуждая режим автогенерации с использованием выделенных лучей, исследовать изменчивость гидрофизических параметров морских акваторий по выделенной таким образом трассе.
Причем определение изменчивости гидрофизических параметров морской среды и ее природу проводят по результатам анализа изменчивости частоты автогенерации (температура дает медленное изменение частоты, а появление технического объекта - быстрое и т.д.).
Автогенераторный способ акустического мониторинга изменчивости параметров морских акваторий обладает по сравнению с прототипом:
- простотой и высокой точностью измерения частоты - основного параметра - частоты автогенерации;
- автоматической адаптацией схемы автогенератора к изменяющейся интерференционной акустической картине и настройкой на ее максимум;
- высокой чувствительностью как к модулю, так и к фазе (т.е. волновой дистанции) коэффициента передачи акустического тракта;
- низким уровнем акустического сигнала, необходимого для прецизионных измерений, обусловленного малой спектральной шириной линии автогенерации и невысокой мощностью излучения для компенсации автоматически минимизируемых потерь при распространении звука по трассе.
Источники информации
1. J. Acoust. Joc. Amer., 1994, 86, N 4.
2. Проблемы метрологии и гидроакустических измерений, Менделеево ВНИИФТРИ, 1992, с. 96-101.
3. W. H. Munk, R.C. Spindel, A. Baggeroel, T.C. "Birdsall The heard island feasibility test" // J. Acoust. Joc. Amer., 1994, 96, N 4, pp. 2330-2342 - прототип.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ АКУСТИЧЕСКОГО МОНИТОРИНГА ИЗМЕНЧИВОСТИ ПАРАМЕТРОВ МОРСКИХ АКВАТОРИЙ | 2014 |
|
RU2563317C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ДВИЖУЩЕГОСЯ ОБЪЕКТА В ОКЕАНЕ | 1997 |
|
RU2127890C1 |
| СПОСОБ ПАРАМЕТРИЧЕСКОГО ПРИЕМА ВОЛН РАЗЛИЧНОЙ ФИЗИЧЕСКОЙ ПРИРОДЫ ИСТОЧНИКОВ, ПРОЦЕССОВ И ЯВЛЕНИЙ АТМОСФЕРЫ, ОКЕАНА И ЗЕМНОЙ КОРЫ В МОРСКОЙ СРЕДЕ | 2014 |
|
RU2602763C2 |
| СПОСОБ ФОРМИРОВАНИЯ И ПРИМЕНЕНИЯ ПРОСТРАНСТВЕННО РАЗВИТОЙ ПРОСВЕТНОЙ ПАРАМЕТРИЧЕСКОЙ АНТЕННЫ В МОРСКОЙ СРЕДЕ | 2014 |
|
RU2602995C2 |
| СПОСОБ ФОРМИРОВАНИЯ ПАРАМЕТРИЧЕСКОЙ АНТЕННЫ В МОРСКОЙ СРЕДЕ | 2014 |
|
RU2550588C1 |
| ГИДРОАКУСТИЧЕСКИЙ ПОЛИГОН | 1998 |
|
RU2132576C1 |
| СПОСОБ ПАРАМЕТРИЧЕСКОГО ПРИЕМА ГИДРОФИЗИЧЕСКИХ И ГЕОФИЗИЧЕСКИХ ВОЛН В МОРСКОЙ СРЕДЕ | 2013 |
|
RU2536837C1 |
| СИСТЕМА АКУСТИЧЕСКОЙ ТОМОГРАФИИ ГИДРОФИЗИЧЕСКИХ И ГЕОФИЗИЧЕСКИХ ПОЛЕЙ В МОРСКОЙ СРЕДЕ | 2015 |
|
RU2602993C1 |
| СПОСОБ ПАРАМЕТРИЧЕСКОГО ПРИЕМА ВОЛН РАЗЛИЧНОЙ ФИЗИЧЕСКОЙ ПРИРОДЫ В МОРСКОЙ СРЕДЕ | 2011 |
|
RU2474793C1 |
| СПОСОБ ИЗМЕРЕНИЯ ПАРАМЕТРОВ ШУМНОСТИ ПЛАВСРЕДСТВА С ПОМОЩЬЮ ЛАЗЕРНОГО ГИДРОФОНА | 1999 |
|
RU2167500C1 |


Изобретение относится к области гидроакустики и может быть использовано для создания локальных региональных и глобальных акустических систем долговременного контроля вдоль трасс распространения звука таких параметров морской среды, как средняя температура вод и ее изменчивость, проекции на трассу скорости течения, наличия на трассе гидрофизических неоднородностей, льда, движения рыбных скоплений, прохождения судов и т.п. Существо изобретения заключается в том, что в морской среде формируется акустическая приемно-излучающая трассовая схема. При этом принятый приемным элементов трассовой схемы сигнал подают на излучающую сторону трассы и нелинейно усиливают до появления автогенерации в трассовой схеме на одной из частот, определяемой гидрофизическими условиями на трассе распространения звука, затем измеряют частоту автогенерации в трассовой схеме и по ее значению судят об изменениях параметров морской среды. Режим автогенерации в трассовой схеме можно проводить в прямом и обратном направлениях для определения скорости течения. В трассовой схеме можно выделять требуемую группу лучей и на них возбуждать режим автогенерации. При обработке принятого приемным элементом трассовой схемы акустического сигнала анализируют спектры изменчивости частоты автогенерации, по которым судят о природе изменчивости гидрофизических параметров морской среды. 1 з.п.ф-лы, 4 ил.
| J.Acoust | |||
| Joc.AMER., 1994, 96, N4, p.p | |||
| Металлическая печь | 1924 |
|
SU2330A1 |
| US 4275460 A, 29.06.81 | |||
| ПРИЕМНАЯ ГИДРОАКУСТИЧЕСКАЯ АНТЕННА С ЛУЧЕВОЙ ДИАГРАММОЙ НАПРАВЛЕННОСТИ И СИСТЕМА ПИТАНИЯ ЕЕ ЭЛЕКТРОННОЙ АППАРАТУРЫ | 1993 |
|
RU2042147C1 |
| А.С.Колчеданцев | |||
| Гидроакустические станции | |||
| - Л.: Судостроение, 1982, с.73 - 80. | |||
