Изобретение относится к области гидроакустики и может быть использовано для измерения параметров шумности надводного и подводного плавсредств с помощью бестелесного лазерного гидрофона, например, для измерения уровней давления источников шумоизлучения на плавсредстве и их пространственных координат.
Известен способ аналогичного назначения, основанный на использовании лазерного доплеровского гидрофона для измерения параметров шумности плавсредства [1].
Недостатком известного способа является необходимость введения в водную среду светорассеивающих частиц для работы лазерного гидрофона, а также погрешности измерения параметров шумности плавсредства, связанные с неточностью следования инородных частиц за колебаниями частиц водной среды, происходящими под действием звуковой волны.
Известен способ измерения параметров шумности плавсредства с помощью лазерного гидрофона, заключающийся в формировании в водной среде с помощью двух узкопольных теневых систем зоны чувствительности гидрофона и направления к сформированной зоне чувствительности исследуемого плавсредства с последующей корреляционной обработкой зарегистрированных теневыми системами фотоэлектрических сигналов, по результатам которой судят о параметрах шумности плавсредства [2]. Данный способ принят за прототип.
В прототипе используется денситометрический способ регистрации параметров звуковой волны, для которого отпадает необходимость введения в водную среду инородных светорассеивающих частиц. Недостатком прототипа является необходимость использования значительных мощностей лазерного излучения для формирования двух узкопольных теневых систем, что ограничивает практическое применение способа случаями небольших акваторий гидроакустических полигонов, на которых способ реализуется.
Техническим результатом, получаемым от внедрения изобретения, является устранение данного недостатка прототипа, т.е. расширение области применения способа на случай больших акваторий водной среды за счет использования импульсного лазерного излучения той же энергетики.
Данный технический результат достигают за счет того, что в известном способе измерения параметров шумности плавсредства с помощью лазерного гидрофона, заключающемся в формировании в водной среде с помощью двух узкопольных теневых систем зоны чувствительности исследуемого плавсредства с последующей корреляционной обработкой зарегистрированной теневыми системами фотоэлектрических сигналов, по результатам которой судят о параметрах шумности плавсредства, зону чувствительности гидрофона в водной среде формируют с помощью двух узкопольных теневых систем с параллельными оптическими осями и работающих в режиме последовательности лазерных импульсов, исследуемое плавсредство направляют к сформированной зоне чувствительности ортогонально плоскости расположения оптических осей теневых систем.
Кроме того, после этого исследуемое плавсредство дополнительно направляют вдоль плоскости расположения оптических осей узкопольных теневых систем лазерного гидрофона параллельно этим оптическим осям.
В частном случае последовательность лазерных импульсов в узкопольных теневых системах задают с частотой ft [Гц] , равной f = 2 π c/b, где с [м•c-1] - скорость звука в зоне чувствительности, b [м] - расстояние между параллельными оптическими осями теневых систем.
Использование лазерного гидрофона с двумя узкопольными теневыми системами, у которых оптические оси параллельны, а их общий лазер работает в режиме последовательности импульсов и одновременно удлиняет измерительную базу (максимально возможную длину лазерных лучей в акватории), а значит, и расширяет область применения известного способа.
Последовательное направление исследуемого плавсредства сначала ортогонально плоскости расположения оптических осей теневых систем, а затем вдоль ее позволяет измерить сначала пространственное расположение дискретных источников шумоизлучения на исследуемом плавсредстве, а затем постоянство уровня давления шумоизлучения плавсредства во времени.
Таким образом, все представленные в формуле изобретения существенные признаки взаимосвязаны, направлены на решение одной задачи и достижение одного поставленного технического результата. То есть единство изобретения в заявке соблюдено.
Изобретение поясняется чертежами.
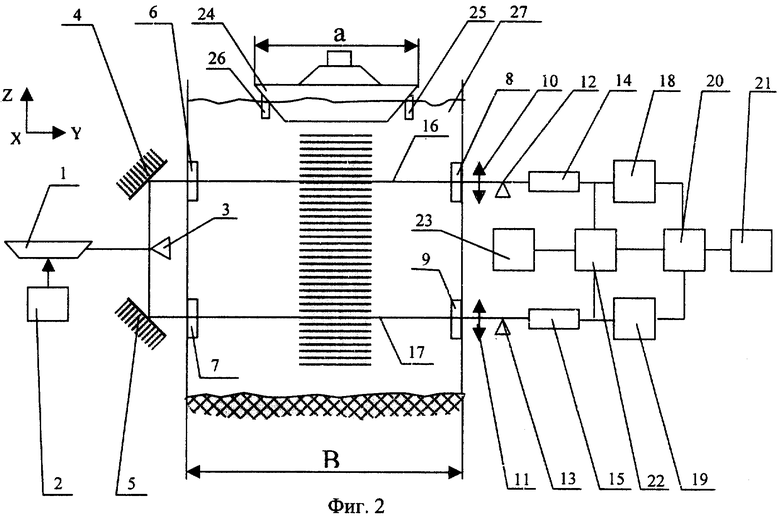
На фиг. 1, 2 представлены схемы реализации способа соответственно по п. 1 и п. 2 формулы изобретения; на фиг. 3 - временные диаграммы, поясняющие сущность способа.
Схемы реализации способа измерения параметров шумности плавсредства с помощью лазерного гидрофона включают в себя лазер 1, работающий в режиме последовательности импульсов, и управляемый блок 2 питания, расщепитель 3 лазерного луча, рефлекторы 4, 5, оптические окна 6, 7, 8, 9, приемные объективы 10, 11, шлирные ножи 12, 13 и фотоприемники 14, 15. Перечисленные элементы 1-15 (фиг. 1, 2) образуют две узкопольные теневые системы с фотоэлектрической регистрацией смещения лазерных лучей 16, 17, оптические оси которых параллельны между собой и расположены на расстоянии b. Лазерные лучи 16, 17 формируют зону чувствительности лазерного гидрофона.
Электронная часть лазерного гидрофона включает в себя усилители 18, 19 и коррелятор 20, выход которого подключен к регистратору 21, а входы через усилители 18, 19 - к фотоприемникам 14, 15. Выход коррелятора 20 может также быть подключен к управляющему входу блока 2 питания лазера 1 (фиг. 1).
Схема реализации способа может также включать в себя измеритель 22 времени τ запаздывания звука при прохождении им расстояния b между лазерными лучами 16, 17 (фиг. 2) и регистратор 23 скорости звука. В этом случае измеритель времени управляет величиной задержки коррелятора 20, наподобие того, как это делается в более усовершенствованном по сравнению с прототипом лазернoм гидрофонe [3].
Исследуемое плавсредство 24 длиной а снабжается двумя остронаправленными маркерными источниками 25, 26 звука, в виде гидроакустических излучателей звуковой волны, снабженной известным признаком. В этом случае электронная схема лазерного гидрофона включает в себя демодуляторы и фильтры для выделения излучения маркерных источников 25, 26 звука, устанавливаемых на носу и корме плавсредства 24 (на чертеже данные блоки не показаны).
Способ измерения параметров шумности плавсредства 24 с помощью лазерного гидрофона реализуется следующим образом.
Исследуемое плавсредство 24 направляют в акватории 27 со скоростью ортогонально плоскости расположения лазерных лучей 16, 17 теневых систем (ортогонально плоскости чертежа yz), как представлено на фиг. 1.
Поскольку лазерный гидрофон представляет собой векторный приемник с остронаправленной характеристикой направленности [2, 3] , то при движении плавсредства 24 с равномерной скоростью V в указанном направлении происходит последовательное воздействие дискретно расположенных на плавсредстве 24 источников шумоизлучения на лазерные лучи 16, 17. Последние, испытывая угловые отклонения под действием оптических неоднородностей, вызванных звуковыми волнами, претерпевают амплитудную модуляцию по интенсивности на выходе фотоприемников 14, 15, которая усиливается действием приемных объективов 10, 11 и шлирных ножей 12, 13.
Фотоприемники 14, 15 преобразуют пульсации света в пульсации фототока, усиливаемые усилителями 18, 19.
Коррелятор 20 настроен на время задержки τ = b/c. Это позволит выделить полезный сигнал на фоне более интенсивных помех гидрофизического характера, двигающихся со скоростями на три-четыре порядка меньших скорости звука.
От гидроакустических помех, в частности морских шумов, позволяет отмежеваться использование кривой прохода плавсредства зоны чувствительности гидрофона. В этом случае между коррелятором 20 и регистратором 21 дополнительно устанавливаются блоки для выделения кривой прохода [2].
Маркерные источники 25, 26 звука при этом дают четкие границы кривой прохода плавсредства 24. Кроме того, кормовой маркерный источник 26 звука может выключить лазер 1 для окончания данной стадии эксперимента. (Если плавсредство 24 идет задним ходом, то же самое может сделать носовой маркерный источник 25 звука).
Помехоустойчивость лазерного гидрофона в значительной степени зависит от точности определения скорости звука "с" в зоне чувствительности. В связи с этим скорость звука в зоне чувствительности может измеряться в процессе эксперимента по аналогии с известным решением [3], используя для этого звуковые волны одного из маркерных источников, которые, в частности, могут работать в импульсном режиме. В этом случае на линию задержки коррелятора 20 подается управляющий сигнал для коррекции времени задержки первого сигнала гидрофона относительно второго (фиг. 2).
Таким образом, на регистраторе 21 записывается сигнал, несущий информацию о параметрах шумности плавсредства.
В другом варианте исследования лазерного гидрофона для измерения параметров шумности плавсредства 24 последнее направляют вдоль плоскости расположения оптических осей лазерных лучей 16, 17 (так чтобы продольная ось плавсредства 24 и оси лазерных лучей 16, 17 лежали в одной плоскости). Данный случай представлен на фиг.2.
Маркерные источники 25, 26 звука в данном случае выключают, а лазер 1 включают с частотой f генерации импульсов, равной f = πc/b для экономии энергии. За время прохода расстояния, близкого к b (фиг. 2), определяется постоянство уровня шумоизлучения плавсредства 24 на различных скоростях его движения. При этом скорость движения плавсредства может меняться и за время прохода расстояния b.
Пример конкретной реализации способа.
Пусть исследуется надводное плавсредство длиной а = 100 м, двигающееся с равномерной скоростью V = 10 м•с-1. Расстояние b между лазерными лучами b= 0,3 м. Расстояние d между плавсредством и лазерными лучами d = 50 м. Длительность лазерного импульса tn равна 10-4 с.
Для этих типичных данных время задержки в корреляторе 20 будет  ; время прохода плавсредством зоны чувствительности при диаметре лазерных лучей, например, 10-2 м будет t=a/v= 100/10 = 10 м. Частота f следования импульсов (для выполнения пункта 3 формулы изобретения) будет
; время прохода плавсредством зоны чувствительности при диаметре лазерных лучей, например, 10-2 м будет t=a/v= 100/10 = 10 м. Частота f следования импульсов (для выполнения пункта 3 формулы изобретения) будет  Нетрудно заметить, что в данном случае лазер включается в те моменты времени, когда одна и та же оптическая неоднородность, вызванная исследуемым шумом, проходит сначала лазерный луч 16, а затем лазерный луч 17, т.е. время паузы между двумя импульсами равно времени задержки τ.
Нетрудно заметить, что в данном случае лазер включается в те моменты времени, когда одна и та же оптическая неоднородность, вызванная исследуемым шумом, проходит сначала лазерный луч 16, а затем лазерный луч 17, т.е. время паузы между двумя импульсами равно времени задержки τ.
Временные диаграммы на фиг. 3 поясняют сущность способа. На фиг. 3а представлены два реперных импульсных сигнала от маркерных источников 25, 26 звука. Период t1 = а/v задает время прохода плавсредством 24 зоны чувствительности лазерного гидрофона и длительность получаемой кривой прохода.
На фиг. 3б представлены импульсы, генерируемые лазером 1, длительностью tu.
На фиг. 3б,г представлены кривые прохода 29, 30 плавсредством 24 лазерных лучей 16, 17, сдвинутые на время τ, которое взято для ясности иллюстрации больше приведенного выше случая. Здесь не представлены кривые 31, 32, отображающие все возможные помехи. Уровень помех может быть выше уровня полезного сигнала. Данные сигналы, замешанные друг с другом, присутствуют соответственно на выходах усилителей 18, 19.
На фиг. 3д представлена кривая прохода 31, выделенная из помех коррелятором 20, а на фиг. 3г - сигнал, полученный в результате обработки кривой прохода известными способами.
На последней кривой различные лики сигналов отображают уровень и координату дискретных источников шумоизлучения, расположенных вдоль плавсредства 24.
Поскольку лазер 1 работает в режиме последовательности импульсов, а лазерные лучи 16, 17 - параллельны, расстояние B, определяющее базу измерения гидрофона, может достигать порядка километра при той же затрачиваемой энергии, что у прототипа. Однако для возмещения потерь информации между импульсами плавсредство 24 необходимо направлять к зоне чувствительности лазерного гидрофона несколько раз.
Кроме того, в связи с тем, что зона чувствительности лазерного гидрофона в данном решении в отличиe от прототипа носит интегральный характер и равна по существу расстоянию B (фиг.2), то помехоустойчивость гидрофона снижается, поскольку он может воспринимать гидроакустические шумы (например, шумы морских волн) на всем протяжении лучей 16, 17, если акустические помехи распространяются в плоскости yz ортогонально плоскости расположения осей лазерных лучей. Это усложняет обработку принятых сигналов по сравнению с прототипом.
Однако в заявленном решении в отличиe от прототипа появляется возможность определения постоянства уровня шумоизлучения во времени на различных скоростях движения плавсредства вдоль лучей 16, 17.
В этом случае сигнал на фиг. 3е представляет собой импульсы постоянной амплитуды, если уровень шумоизлучения плавсредств за время эксперимента не изменяется.
Таким образом, в заявленном способе появляется возможность измерения параметров шумности плавсредств с помощью лазерного гидрофона на больших по сравнению с прототипом акваториях океана, что в свою очередь дает возможность получать дополнительные данные о параметрах шумности исследуемого плавсредства. Этим и достигается поставленный в заявке технический результат.
Источники информации
1. Патент США 5175713, кл. 367-151 (H 04 R 23/00), 1992.
2. Патент РФ N 2092802, кл. H 04 R 1/44, H 04 R 23/00, 1993 - прототип.
3. Заявка N 97120169/28, по которой вынесено положительное решение на выдачу патента РФ.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ УРОВНЕЙ ДАВЛЕНИЯ И ПРОСТРАНСТВЕННОГО РАСПОЛОЖЕНИЯ ИСТОЧНИКОВ ШУМОИЗЛУЧЕНИЯ ДВИЖУЩЕГОСЯ ОБЪЕКТА | 1993 |
|
RU2092802C1 |
| ГИДРОАКУСТИЧЕСКИЙ ПОЛИГОН | 1998 |
|
RU2132576C1 |
| ЛАЗЕРНЫЙ ВЕКТОРНЫЙ ПРИЕМНИК ДЛЯ ИНФРАЗВУКОВЫХ ПОЛЕЙ | 2005 |
|
RU2290770C1 |
| СПОСОБ АКУСТИЧЕСКОГО МОНИТОРИНГА ИЗМЕНЧИВОСТИ ПАРАМЕТРОВ МОРСКИХ АКВАТОРИЙ | 1997 |
|
RU2134432C1 |
| ГИДРООПТИЧЕСКАЯ АППАРАТУРА ДЛЯ ОБСЛЕДОВАНИЯ ПОДВОДНОГО ОБЪЕКТА | 2001 |
|
RU2193213C1 |
| ШУМОПЕЛЕНГАТОР | 1995 |
|
RU2106651C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ДВИЖУЩЕГОСЯ ОБЪЕКТА В ОКЕАНЕ | 1997 |
|
RU2127890C1 |
| ОПТИЧЕСКИЙ ДОПЛЕРОВСКИЙ ГИДРОФОН | 2001 |
|
RU2185709C1 |
| СПОСОБ ИЗМЕРЕНИЯ ПАРАМЕТРОВ ШУМОИЗЛУЧЕНИЯ ПОДВОДНОГО ОБЪЕКТА | 1995 |
|
RU2105991C1 |
| СПОСОБ ОБНАРУЖЕНИЯ И ЛОКАЦИИ ПОДВОДНОЙ ЦЕЛИ НА ОХРАНЯЕМОЙ МОРСКОЙ АКВАТОРИИ | 2000 |
|
RU2176401C1 |

Изобретение относится к гидроакустике. В водной среде с помощью двух узкопольных теневых систем с параллельными оптическими осями формируют зону чувствительности лазерного гидрофона и направляют к этой зоне исследуемое плавсредство ортогонально плоскости расположения оптических осей теневых систем или дополнительно вдоль этих осей. Системы работают в режиме последовательности лазерных импульсов. Затем проводят корреляционную обработку зарегистрированных теневыми системами фотоэлектрических сигналов, по результатам которой судят о параметрах шумности плавсредства. В результате появляется возможность проводить измерения на больших морских акваториях. 2 з.п. ф-лы, 3 ил.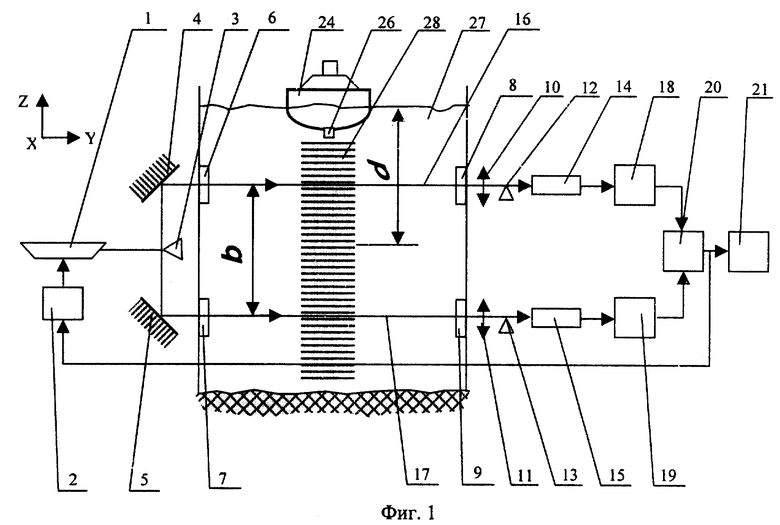
| СПОСОБ ОПРЕДЕЛЕНИЯ УРОВНЕЙ ДАВЛЕНИЯ И ПРОСТРАНСТВЕННОГО РАСПОЛОЖЕНИЯ ИСТОЧНИКОВ ШУМОИЗЛУЧЕНИЯ ДВИЖУЩЕГОСЯ ОБЪЕКТА | 1993 |
|
RU2092802C1 |
| JP 63227490 A, 21.09.1988 | |||
| US 5493540 A, FEB.20,1996 | |||
| СПОСОБ СЕЙСМИЧЕСКОЙ РАЗВЕДКИ | 1991 |
|
RU2029318C1 |
| US 5345522 A, SEP.6,1994. | |||

