Изобретение относится к области гидроакустики и может быть использовано для акустического мониторинга морей и внутренних водоемов в интересах контроля экологической стабильности, поиска промысловых скоплений гидробионтов, обнаружения нарушителей в экономической зоне страны и т.п.
Известен способ, аналогичного назначения [1], реализуемый в акустическом гидролокаторе, заключающийся в импульсном акустическом облучении контролируемой области акватории и приеме рассеянного объектом и искаженного средой акустического импульса. Способ позволяет обнаружить объект при наличии мешающих отражений за счет того, что частотные спектры мешающих ограждений (поверхность воды, дно, границы резкого перепада температуры и т.п.) обладает иным, обычно значительно более широким спектром сигнала, по сравнению со спектром сигнала, рассеянного объектом.
Недостатком известного способа является слабое подавление мешающих отражений, т. к. часть спектральной энергии последних неизбежно попадает в анализируемую часть полезного сигнала.
Известен способ обнаружения движущегося объекта, принятый за прототип, заключающийся в импульсном акустическом облучении контролируемой области акватории океана и приеме рассеянного объектом и искаженного водной средой акустического импульса [2].
В прототипе измеряют доплеровскую частоту в принятом акустическом сигнале, по которой обнаруживают движущийся объект в акватории океана. При этом автоматически частично подавляются мешающие помехи. Недостатком прототипа является необходимость для его реализации наличие высокой отражающей способности контролируемого объекта и достаточно высокой скорости его движения.
Техническим результатом, получаемым от внедрения изобретения, является расширение области применения известного способа на случай обнаружения слабоотражающих слабоконтролируемых объектов, включая низкоскоростные объекты и гидрофизические неоднородности самой среды.
Данный технический результат достигается за счет того, что в известном способе обнаружения движущегося объекта в океане, заключающемся в импульсном акустическом облучении контролируемой области акватории океана и приеме рассеянного объектом и искаженного средой акустического импульса, проводят повторное облучение той же области акватории океана акустическим импульсом, идентичным первому, и причем рассеянного объектом и искаженного средой акустического импульса в той же точки акватории, удаленной от точки излучения, причем импульсное акустическое облучение объекта проводят линейно частотномодулированным сигналом, а в принятом сигнале выделяют временную последовательность импульсов, соответствующих разным путем их распространения в среде, и определяют разность между двумя последовательно принятыми акустическими сигналами путем вычитания временной последовательности импульсов, соответствующей первому импульсному акустическому облучению, из временной последовательности соответствующей повторному импульсному облучению акватории, по которой обнаруживают движущийся объект.
Кроме того, импульсное акустическое облучение объекта могут проводить серией импульсов, согласуя длительности серии с длиной трассы движения объекта, а разность между двумя последовательно принятыми акустическими сигналами определяют путем вычитания из каждого предыдущего импульса последующего и по полученному набору разностей временных последовательностей импульсов определяют динамику движения объекта.
В частном случае импульсное акустическое облучение контролируемой области акватории проводят с регулируемой частотой следования импульсов, согласованной с пространственно-временными характеристиками движущегося объекта.
При этом прием рассеянного объектом и искаженного средой импульса проводят в нескольких точках акватории, распределенных с шагом, согласованным с радиусом обнаружения объекта.
Изобретение поясняется чертежом, на фиг. 1, 2 которого представлены примеры схем практической реализации способа; на фиг. 3 - временный диаграммы, поясняющие существо способа.
Практическая реализация способа выглядит следующим образом. Контролируемый объект 1 (фиг. 1) движется в исследуемой области акватории 2 океана. Акватория 2 облучается от импульсного излучателя 3, соединенного кабелем 4 с береговой аппаратурой 5. На удалении излучателя 3 расположен приемник 6 звука, который также может быть подключен к береговой аппаратуре 5 или к автономным блокам обработки и регистрации сигналов, расположенных на плавсредстве (на фиг. 1 не показано).
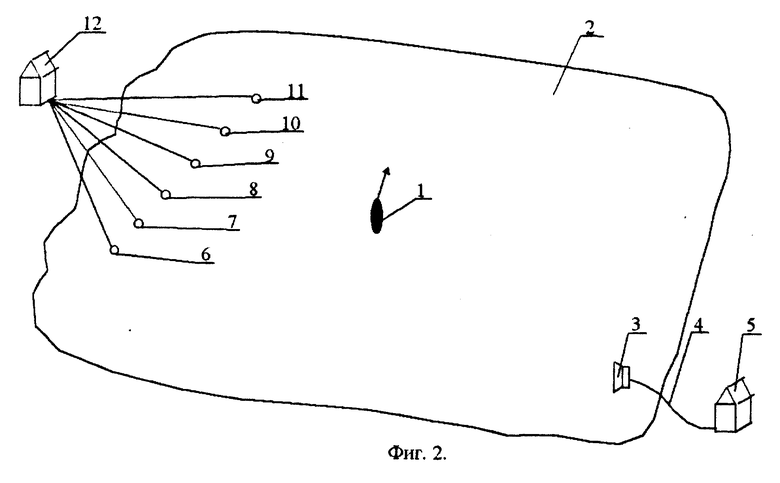
Второй вариант реализации способа представлен на фиг. 2. В отличие от первого варианта (фиг. 1) в последнем случае в контролируемой области акватории 2 помимо импульсного акустического излучателя 3 располагают несколько акустических приемников 6...11, распределенных с шагом, согласованным с радиусом обнаружения объекта 1.
Способ реализации на основе следующих предпосылок.
Обнаружение движущегося объекта в океане (и вообще весь акустический мониторинг морей и внутренних водоемов) должно ориентироваться на четкую регистрацию любых, сравнительно быстрых, изменений в акватории 2. Именно изменения в передаточной функции среды для акустических сигналов, а не стабильная часть передаточной функции, несут информацию о искомых событиях. Этим требованиям как раз отвечает данный способ, основанный на регистрации разности двух интерференционных картин в многолучевом акустическом поле, полученных последовательно через некоторый временной промежуток времени. Какой бы ни была в этом случае передаточная функция среды, если она между двумя импульсами остается неизменной, то вычитание последовательно получаемых интерференционных картин всегда дает ноль. Это произойдет, конечно, при условии, что потеря когерентности в акустическом поле будет минимальной. Вообще говоря, ноль в реальных условиях не может быть получен: минимальный сигнал будет обусловлен аддитивным шумом среды и раскорреляцией сигнала.
Реализация способа по схеме, представленной на фиг. 1, 2, осуществляется следующим образом.
С помощью акустического излучателя 3 проводят облучение контролируемой области акватории 2 океана двумя идентичными импульсами, разделенными известным временным промежутком. В трассовом варианте мониторинга (фиг. 1) сигналы излучателя 3 принимаются излучателем 6 звука (приемной антенной). В площадном акустическо-голографическом варианте (фиг. 2) сигналы излучателя 3 принимаются, например, распределенной по площади дна системой 6...11 акустических приемников (звукоприемных модулей), имеющих между собой кабельное соединение. Шаг (или размер координатной сетки) между звукоприемными модулями определяется радиусом заметности акустических эффектов, вызываемых контролируемым движущимся объектом 1. При этом наряду с полезным сигналом регистрируются отраженные, рассеянные поля, эффекты дифракции (в том числе затенения), а также рефракционные и доплеровские изменения в акустическом поле, порожденные течениями, турбулентностью, внутренней волной или иной неоднородностью (например, внутренней волной, или косяком рыбы, или плывущей льдиной, судном). Посланный в направлении акустического приемника 6 акустический импульс от излучателя 3 будет распространяться по воздушным трассам (лучам) (фиг. 1), образуя акустические лучи.
Один из лучей (A) провзаимодействует напрямую с движущимся объектом 1. Другой (B) провзаимодействует с объектом 1, отразившись от дна водоема. Все остальные лучи пройдут мимо объекта 1.
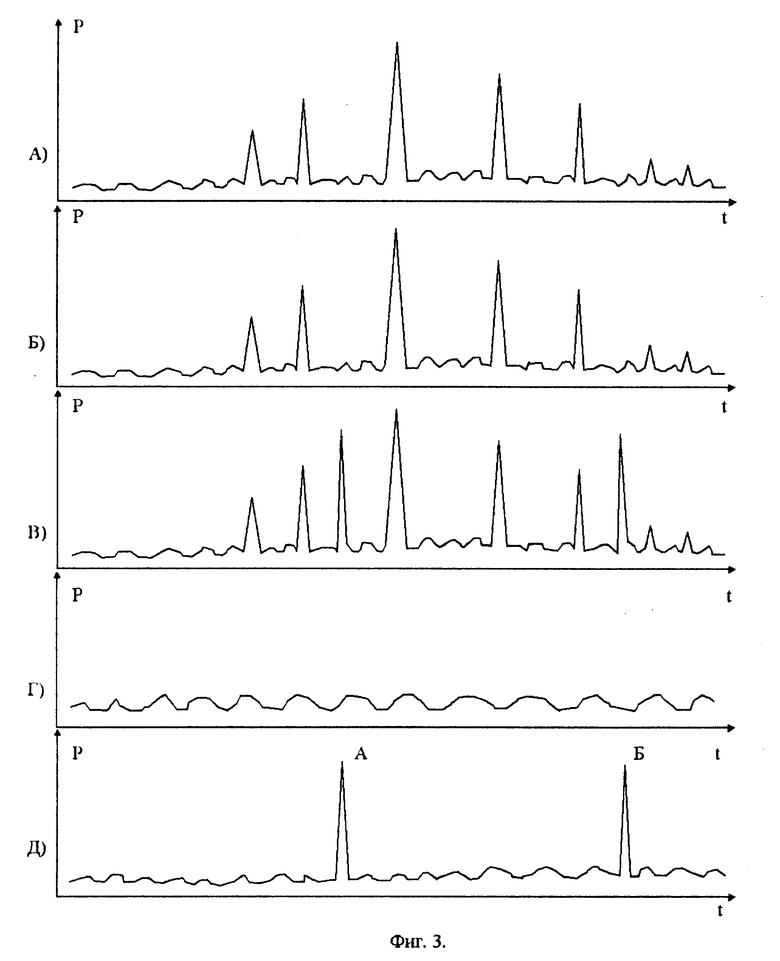
В связи с чем каждый посланный в акваторию 1 акустический импульс будет принят приемником 6 разновременно в виде серии импульсов (фиг. 3а, б).
Если объект 1 в контролируемой области акватории 2 отсутствует, то принятые от двух импульсов сигналы (фиг. 3а и фиг. 3б) будут одинаковыми и разностный сигнал (фиг. 3г) будет представлять собой лишь шум, который может быть отсечен устанавливаемым порогом. В случае наличия объекта 1 в акватории 2 сигналы, принятые от первого и второго импульсов (фиг. 3а и фиг. 3в) будут различаться лишь в части полезного сигнала, поскольку объект 1 за время между импульсами успел переместиться и провзаимодействовать уже с другими лучами, а фоновая акустическая обстановка осталась без изменения. Разностный сигнал (фиг. 3д) в этом случае будет представлять собой два импульса А и Б, которые провзаимодействовали с объектом 1 напрямую и отразившись от дна водоема. По временным характеристикам сигналов А и Б можно определить положение объекта, а по амплитудам - его энергетику. Причем площадный акусто-голографический вариант реализации способа (фиг. 2) позволяет распространить способ сразу на большую область акватории 2.
Измерение времени распространения сигналов с точность до долей миллисекунды - задача сложная, поскольку для этого обычно требуется излучение широкополосных длительных сигналов с высокой сложностью. Используя сложное соотношение Δt ≈ 1/Δf, где Δf - ширина полосы излучаемого сигнала, а Δt - разрешение по времени, можно найти, что для Δt = 10-3 с требуется ширина спектра 103 Гц. Для увеличения точности измерения времени используются различные виды широкополосных сигналов и специальные методы их анализа. Очень эффективным оказалось сочетание спектрометрии временных задержек с узкополосной деконволюцией сигналов.
Метод спектрометрии временных задержек использует излучение акустического линейно-частотно-модулированного сигнала длительностью  После прохождения среды по разным лучам и отражения от дна и поверхности сигнал растягивается по времени, многократно повторяясь. В точке приема важно получить отдельно характеристики каждого из сигналов, прошедших по разным лучам. Для этого принятый сигнал перемножается на опорный, идентичный излучаемому, после чего с помощью фильтра низких частот выдается сигнал разностной частоты
После прохождения среды по разным лучам и отражения от дна и поверхности сигнал растягивается по времени, многократно повторяясь. В точке приема важно получить отдельно характеристики каждого из сигналов, прошедших по разным лучам. Для этого принятый сигнал перемножается на опорный, идентичный излучаемому, после чего с помощью фильтра низких частот выдается сигнал разностной частоты  , где tр - длительность принятого сигнала. Если сигнал прошел среду, характеризующуюся импульсной переходной характеристикой h(t), форма спектра сигнала разностной частоты будет идентична h(t), что и нужно для мониторинга трасс. Спектр сигнала разностной частоты представляет собой совокупность максимумов, по форме идентичных h(t) и смещенных по частоте пропорционально времени распространения. Как показал опыт, динамический диапазон при этом оказывается больше 80 дБ, что позволяет выделять слабые сигналы в присутствии сильных с временным разрешением 10-3 с при различии уровней сигналов в 104 раз. Метод спектрометрии временных задержек с использованием высокоточной синхронизации излучающей и приемной систем акустической трассы дает выигрыш в точности измерения временных задержек, зависящий от отношения сигнал/шум, так что
, где tр - длительность принятого сигнала. Если сигнал прошел среду, характеризующуюся импульсной переходной характеристикой h(t), форма спектра сигнала разностной частоты будет идентична h(t), что и нужно для мониторинга трасс. Спектр сигнала разностной частоты представляет собой совокупность максимумов, по форме идентичных h(t) и смещенных по частоте пропорционально времени распространения. Как показал опыт, динамический диапазон при этом оказывается больше 80 дБ, что позволяет выделять слабые сигналы в присутствии сильных с временным разрешением 10-3 с при различии уровней сигналов в 104 раз. Метод спектрометрии временных задержек с использованием высокоточной синхронизации излучающей и приемной систем акустической трассы дает выигрыш в точности измерения временных задержек, зависящий от отношения сигнал/шум, так что  где N и S - спектральные плотности шума и сигнала соответственно.
где N и S - спектральные плотности шума и сигнала соответственно.
Такая высокая точность измерения временных задержек необходима в способе для разделения сигналов, распространяющихся по различным траекториям-лучам, а следовательно, для точного определения местоположения объекта и позволяет получить минимальную разность при вычитании двух последовательных импульсов в описываемом методе. В этом случае акустический широкополосный с линейной фазовой характеристикой излучатель 3 облучает акваторию 2 высокостабильными линейно-частотно-модулированными сигналами с регулируемыми длительностью свипа и периодом следования импульсов. Регулировка длительности свипа и скважности импульсов осуществляется с целью адаптации системы мониторинга к задаче и позволяет выделять те явления, период которых (или их скорость) лежит в ожидаемом диапазоне масштабов или скоростей движения обнаруженного явления.
Получаемая разность двух временных последовательностей весьма мала в случае, если в среде между двумя импульсами никаких изменений не произошло и она оказывается в условиях малой потери когерентности в сигнале. Таким образом, согласуя частоту следования импульсов с пространственно-временными характеристиками движущегося объекта, можно четко выявить динамику движения объекта вдоль трассы следования. Причем аппаратура, реализующая предлагаемый способ, позволяет регистрировать не только доплеровские частоты в сигнале как в прототипе, но и факт наличия самого объекта, в том числе по порождаемым им в среде неоднородностям. При этом акустическая контрастность этих неоднородностей существенно повышается вследствие использования разностного принципа регистрации, чем достигается поставленный технический результат.
Источники информации
1. Пат. США N 4204280, кл. 367 - 95 (G 01 S 9/66), 1980.
2. Пат. США N 3976968, кл. 340 - 3D (G 01 S 9/66), 1976 - прототип.
Изобретение относится к гидроакустике и может быть использовано для акустического мониторинга морей и внутренних водоемов. Достигаемый технический результат - обнаружение слабоотражающих и слабоконтрастных объектов, включая низкоскоростные объекты и гидрофизические неоднородности среды. Сущность изобретения заключается в последовательном облучении контролируемой области акватории океана двумя акустическими импульсами, приеме в удаленной точке рассеянных объектом и искаженных средой импульсов, выделении временной последовательности импульсов, соответствующих разным путям их распространения в среде, и определении разности между двумя последовательно принятыми сигналами, по которой обнаруживают движущийся объект. 3 з.п. ф-лы, 3 ил.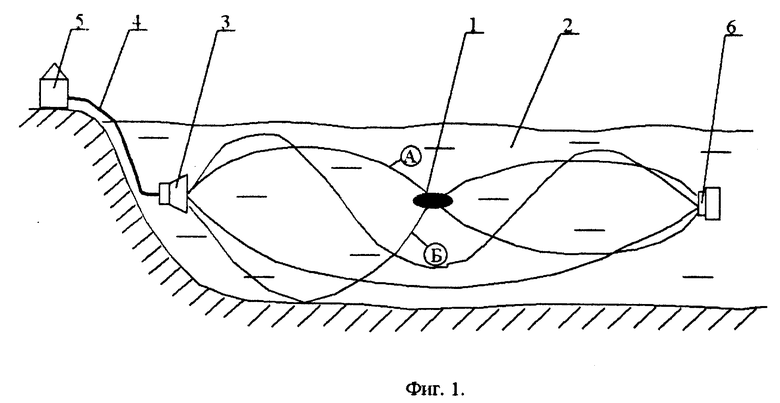
| Клей К | |||
| и др | |||
| Акустическая океанография | |||
| - М.: Мир, 1980, с.195 - 198 | |||
| Коростелев А.А | |||
| и др | |||
| Теоретические основы радиолокации, изд.2-е | |||
| - М.: Сов.Радио, 1978, с.469 - 473 | |||
| US 3976968 A, 24.08.76 | |||
| US 4721961 A, 26.01.88 | |||
| US 3967283 A, 29.06.76 | |||
| US 3877002 A, 08.04.75 | |||
| US 3680039 A, 25.07.72 | |||
| US 4016528 A, 05.04.77 | |||
| US 4026654 A, 31.05.77 | |||
| DE 2905804 A1, 28.08.80. |
