Предлагаемое изобретение относится к области электроизмерительной техники и предназначено для измерения магнитных полей плавсредств на морских маневренных стендах.
Задачей измерения переменного магнитного поля плавсредств является получение такого объема измерительной информации, который мог быть использован для существующих методов анализа и контроля источников электромагнитного излучения судна с целью их обнаружения и компенсации (снижения электромагнитного поля). Причем для эффективной компенсации переменного магнитного поля необходимо измерять не только амплитуду и частотный спектр составляющих магнитной индукции, но и ее направление относительно системы координат контролируемого плавсредства.
Известны устройство и магнитоприемник переменного магнитного поля на основе однокомпонентных индукционных преобразователей [А.с.СССР NN 721784, 968778] , обеспечивающие измерения проекции составляющей вектора магнитной индукции на магнитную ось (МО) преобразователя. Отсутствие информации на выходе однокомпонентных средств измерений (СИ) о направлении измеряемой магнитной индукции источников поля ограничивает их применимость для контроля магнитного поля плавсредств.
Также известно СИ переменного магнитного поля с трехкомпонентным датчиком [Патент США N 4109199], которое может быть использовано для измерения трех ортогональных составляющих переменной магнитной индукции в широком амплитудном и частотном диапазонах. Подобные трехкомпонентные СИ могут быть применены и для измерения магнитного поля плавсредств в режиме их прохождения над заглубленным датчиком. Однако по результатам измерения трех составляющих магнитной индукции нельзя оценить ее направление (направление индукции источников магнитного поля плавсредств). Это происходит по следующим причинам:
- во-первых, из-за того, что результатами измерений являются проекции на МО магниточувствительных элементов (МЧЭ) среднеквадратических или амплитудных значений составляющих индукции измеряемого магнитного поля;
- во-вторых, неизвестны положения МО МЧЭ не только относительно измеряемого (движущего) плавсредства, но и относительно неподвижной системы координат датчика СИ, которая, как правило, должна быть "привязана" к магнитному меридиану.
Наиболее близким по технической сущности к предлагаемому изобретению является СИ магнитной индукции, содержащее трехкомпонентный датчик в виде трех взаимно ортогональных индукционных преобразователей, работающих совместно с соответствующими каналами преобразования и представления информации [Аппаратура K739. ТУ25-04 (ЗПИ.487.056)-77]. Устройство обеспечивает измерения в широком частотном диапазоне среднеквадратических значений трех взаимно перпендикулярных составляющих X,Y,Z вектора магнитной индукции, создаваемой в месте расположения датчика переменным магнитным полем проходящего над ним плавсредства. Для определения положения компонент датчика относительно магнитного меридиана (углов между магнитными осями горизонтальных компонент X,Y датчика и магнитным меридианом - курсом плавсредства) средство измерений снабжено устройством ориентации - устройством привязки результатов измерений к системе магнитных координат.
Основным недостатком известного СИ является невозможность по результатам измерений однозначно оценить направление измеряемой индукции источников электромагнитного поля плавсредства в пространстве (например, в декартовой системе координат). В известных устройствах даже использование дополнительной специальной обработки информации, например, определение угла αi между направлением магнитной индукции и положительным направлением координатных осей X, Y,Z по выражению  где i = x, y, z; Bx, By, Bz - соответственно составляющих X,Y,Z вектора измеряемой магнитной индукции [Справочник по математике. Бронштейн И.Н., Семендяев -М.: Наука, 1981, стр. 234-237] ,, не обеспечивается определение направления магнитного поля в системе координат магнитного поля Земли и, следовательно, в системе координат движущегося плавсредства. Это объясняется потерей информации о знаке при определении как модуля индукции в виде
где i = x, y, z; Bx, By, Bz - соответственно составляющих X,Y,Z вектора измеряемой магнитной индукции [Справочник по математике. Бронштейн И.Н., Семендяев -М.: Наука, 1981, стр. 234-237] ,, не обеспечивается определение направления магнитного поля в системе координат магнитного поля Земли и, следовательно, в системе координат движущегося плавсредства. Это объясняется потерей информации о знаке при определении как модуля индукции в виде  так и ее отдельных составляющих из-за применения среднеквадратических (или амплитудных) преобразователей в устройствах представления информации известных СИ.
так и ее отдельных составляющих из-за применения среднеквадратических (или амплитудных) преобразователей в устройствах представления информации известных СИ.
Необходимо заметить, что под направлением магнитной индукции переменного магнитного поля (как и всякой переменной величины) понимается линия, вдоль которой периодически изменяется мгновенное значение магнитной индукции.
Целью предлагаемого изобретения является определение направления измеряемой магнитной индукции плавсредств путем вычисления номеров диаметрально противоположных (симметричных относительно центра координат) октантов пространства, через которые проходит это направление.
Указанная цель достигается тем, что в средство измерений переменного магнитного поля плавсредств, содержащее опускаемый на дно акватории датчик, состоящий из трех взаимно ортогональных магниточувствительных элементов X,Y, Z, каждый из которых подключен к своим последовательно соединенным нормирующим усилителям X,Y,Z, преобразователям среднеквадратических значений X,Y, Z и устройствам представления информации X,Y,Z, и устройство ориентации, два выхода которого подключены к управляющим входам нормирующих усилителей X,Y, дополнительно введены цифровой индикатор номера октанта, три формирователя X, Y,Z, два исключающих элемента ИЛИ, два инвертора и четыре схемы И, причем вход каждого формирователя подключен к выходу соответствующего нормирующего усилителя, выход формирователя X подключен к первому входу первого элемента ИЛИ, выход формирователя Y - к первому входу второго элемента ИЛИ и второму входу первого элемента ИЛИ, а выход формирователя Z - ко второму входу второго элемента ИЛИ; выход первого элемента ИЛИ подключен одновременно к первым входам второй и четвертой схемы И непосредственно и через первый инвертор - к первым входам первой и третьей схемы И, выход второго элемента ИЛИ подключен одновременно ко вторым входам третьей и четвертой схемы И непосредственно и через второй инвертор - ко вторым входам первой и второй схемы И; выходы схем И подключены соответственно: первой к номерам 1, 7, второй - к номерам 2, 8, третьей - к номерам 3, 5, четвертой - к номерам 4,6 цифрового индикатора октантов.
Отличительными признаками в предлагаемом СИ являются как введение новых узлов, так и связи между узлами устройства. Взятые в совокупности с известными новые узлы и связи между ними заявляемого устройства проявляют новое свойство - возможность определения направления измеряемой магнитной индукции в пространстве.
Сущность изобретения заключается в том, что в СИ реализован комплекс схемотехнических решений, выполняющих формирование из мгновенных значений трех ортогональных составляющих измеряемой магнитной индукции соответствующих сигналов и достижение поставленной цели за счет указанного включения вновь введенных узлов. В результате в реальном масштабе времени определяются номера диаметрально противоположных октантов, через которые проходит направление измеряемой магнитной индукции источников поля плавсредств.
Предлагаемое устройство работает следующим образом (см.фиг.1). Индуцируемые в обмотках магниточувствительных элементов 2x,2y,2z датчика сигналы, пропорциональные ортогональным составляющим X,Y,Z индукции переменного магнитного поля, известным образом преобразуются последовательно включенными нормирующими усилителями 3x, 3y, 3z преобразователями среднеквадратических значений 4x', 4y', 4z и устройствами представления информации 5x,5y,5z. Для "привязки" результатов измерений к системе магнитных координат (магнитному меридиану) и, следовательно, к курсу измеряемого плавсредства служит устройство ориентации 1. В этом устройстве вырабатывают сигналы управления, которые поступают на управляющие входы нормирующих усилителей 3x и 3y и изменяют определенным образом их коэффициенты преобразования в зависимости от курса плавсредств над датчиком. При этом достигается не только введение поправок в результате измерения горизонтальных составляющих измеряемой магнитной индукции, но и определение координат датчика в системе магнитного поля Земли.
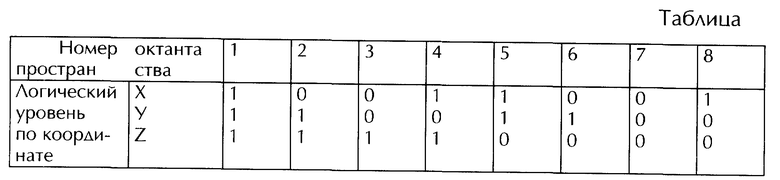
Одновременно мгновенные значения сигналов с выходов усилителей 3x'3y'3z' поступают на входы соответствующих формирователей 6x'6y'6z', где вырабатываются сигналы высокого и низкого уровня (логическая 1 и логический 0) для управления работой по определенному алгоритму комплекса логических узлов устройства. Алгоритм работы логических узлов в устройстве: двух исключающих элементов ИЛИ-7,8, двух инверторов -9,10 и четырех схем И-11,12,13,14 и их взаимная связь (см.фиг.1) реализованы в соответствии со знаком направления измеряемой магнитной индукции в определяемом октанте пространства. Если принять соответствие логической 1 знаку "+", а логического 0 - знаку "-", то для правой декартовой системы координат в пространстве алгоритм работы устройства должен соответствовать данным таблицы.
Например, если направление измеряемой магнитной индукции проходит через второй и восьмой октанты пространства, то в соответствии с данными таблицы и известным принципом работы исключающих ИЛИ на выходе элемента 8 и на вторых входах элементов 13 и 14 - логический 0. За счет работы инверторов (элементы 9 и 10 устройства) на первых входах элементов 11 и 13 формируется логический 0, а на вторых входах элементов 11 и 12 - логическая 1. Согласно принципу работы схем И (элементы 11, 12, 13, 14 устройства) при данном состоянии их входных логических уровней только на выходе элемента 12 появится логическая 1, которая приводит к включению номеров 2, 8 цифрового индикатора октантов 15.
Аналогичным образом реализуется алгоритм обработки логических уровней для включения соответственно 1 и 7, 3 и 5, 4 и 6 номеров цифрового индикатора октантов 15.
Реализация в СИ переменного магнитного поля вновь введенных узлов не представляет трудности. Элементы ИЛИ, И и инверторы могут быть выполнены на микросхемах логики ТТЛ и КМОП, цифровой индикатор октантов - на основе цифробуквенных светодиодных индикаторов, формирователи - на основе операционных усилителей.
Таким образом, в предлагаемом СИ за счет определения направления измеряемой магнитной индукции плавсредств выполняется жесткая привязка результатов измерения к неподвижной (магнитной) системе координат датчика. В свою очередь, координаты контролируемого плавсредства с помощью штатных средств также привязаны к магнитным координатам. Поэтому достижение поставленной цели в предлагаемом СИ обеспечивает достоверность результатов измерения переменного магнитного поля плавсредств, которые эффективно могут быть использованы для выполнения мероприятия по компенсации источников данного поля.
| название | год | авторы | номер документа |
|---|---|---|---|
| СРЕДСТВО ИЗМЕРЕНИЙ ПОСТОЯННЫХ МАГНИТНЫХ ПОЛЕЙ | 1996 |
|
RU2136014C1 |
| АВТОНОМНЫЙ НАВИГАЦИОННЫЙ ПРИБОР | 1994 |
|
RU2098767C1 |
| АВТОНОМНАЯ НАВИГАЦИОННАЯ СИСТЕМА | 1997 |
|
RU2125237C1 |
| Способ измерения линейных перемещений и устройство для его осуществления | 1987 |
|
SU1522028A1 |
| ТЕЛЕВИЗИОННОЕ УСТРОЙСТВО ДЛЯ ОБНАРУЖЕНИЯ ПЕРЕМЕЩЕНИЙ ОБЪЕКТОВ | 1984 |
|
RU2140721C1 |
| ЭКСТРАПОЛЯТОР ИМПУЛЬСНЫХ СИГНАЛОВ | 1999 |
|
RU2168205C1 |
| ЦИФРОВОЙ ФЕРРОЗОНДОВЫЙ МАГНИТОМЕТР | 2012 |
|
RU2503025C2 |
| Устройство для измерения характеристик случайных процессов | 1990 |
|
SU1734045A1 |
| УСТРОЙСТВО ДЛЯ ПЕРЕДАЧИ И ПРИЕМА ТЕЛЕМЕТРИЧЕСКОЙ ИНФОРМАЦИИ | 1991 |
|
RU2020595C1 |
| СПОСОБ ОДНОКАНАЛЬНОГО РАДИОПЕЛЕНГОВАНИЯ КВАЗИГАРМОНИЧЕСКИХ СИГНАЛОВ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 1999 |
|
RU2212681C2 |
Изобретение относится к электроизмерительной технике и предназначено для измерения магнитного поля плавсредств. Достигаемый технический результат - определение направления измеряемой магнитной индукции относительно системы координат контролируемого плавсредства. Средство содержит опускаемый на дно акватории датчик, состоящий из трех взаимно ортогональных чувствительных элементов, каждый из которых подключен к своим, последовательно соединенным, нормирующим усилителям, преобразователям среднеквадратических значений, устройствам представления информации, а также устройство ориентации, два выхода которого подключены к управляющим входам соответствующих нормирующих усилителей, цифровой индикатор номера октанта, три формирователя, два исключающих элемента ИЛИ, два инвертора и четыре схемы И, причем формирователи связаны с соответствующими нормирующими усилителями и исключающими элементами ИЛИ, которые через инверторы и непосредственно связаны со схемами И, подключенными к цифровому индикатору октантов. 1 ил., 1 табл.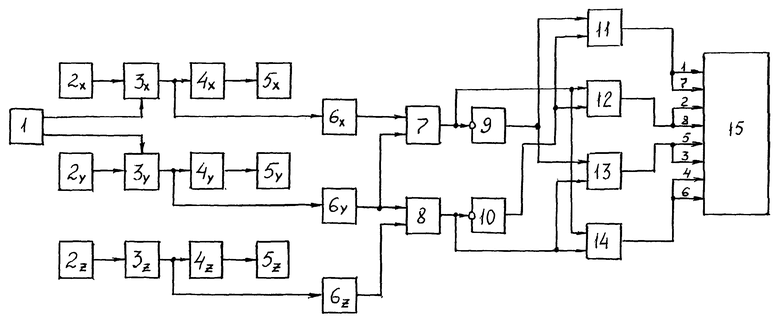
Средство измерений переменного магнитного поля плавсредств, содержащее опускаемый на дно акватории датчик, состоящий из трех взаимно ортогональных магниточувствительных элементов X,Y,Z, каждый из которых подключен к своим последовательно соединенным нормирующему усилителю, преобразователю среднеквадратических значений и устройству представления информации, и устройство ориентации, каждый из двух выходов которого подсоединен к управляющему входу своего нормирующего усилителя, подключенных соответственно к выходу магниточувствительных элементов X и Y, отличающееся тем, что в средство измерений дополнительно введены цифровой индикатор номера октанов, три формирователя X, Y,Z, два исключающих элемента ИЛИ, два инвертора и четыре схемы И, причем вход каждого формирователя X,Y,Z подключен к выходу соответствующего нормирующего усилителя X, Y, Z, выход формирователя Х подключен к первому входу первого исключающего элемента ИЛИ, выход формирователя Y - к первому входу второго исключающего элемента ИЛИ и второму входу первого исключающего элемента ИЛИ, а выход формирователя Z - ко второму входу второго исключающего элемента ИЛИ, выход первого исключающего элемента ИЛИ подключен одновременно к первым входам второй и четвертой схем И непосредственно и через первый инвертор - к первым входам первой и третьей схем И, выход второго исключающего элемента ИЛИ подключен одновременно ко вторым входам третьей и четвертой схем И непосредственно и через второй инвертор - ко вторым входам первой и второй схем И, выходы схем И подключены соответственно: первой - к номерам 1,7, второй - к номерам 2,8, третьей - к номерам 3,5, четвертой - к номерам 4,6 цифрового индикатора номера октанов.
| КИПЯТИЛЬНИК НЕПРЕРЫВНОГО ДЕЙСТВИЯ | 1923 |
|
SU739A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
| Скородубов С.А | |||
| и др | |||
| Помехоустойчивая магнитоизмерительная аппаратура | |||
| - Л.: Энергоиздат, 1981, с | |||
| Прибор для очистки паром от сажи дымогарных трубок в паровозных котлах | 1913 |
|
SU95A1 |
| Устройство для измерения переменной магнитной индукции | 1977 |
|
SU721784A1 |
| US 4109199 A, 22.08.78. | |||
