Изобретение относится к области электромагнитных исследований и может быть использовано преимущественно для поиска, обнаружения, распознавания и отслеживания трасс подводных металлосодержащих протяженных объектов, в том числе и заиленных в донный грунт, например подводных трубопроводов, силовых кабелей и т.д.
Известно устройство для определения трассы прокладки протяженного проводника, содержащее генератор переменного напряжения, излучатель электромагнитного поля и два приемника электромагнитного поля [1].
Данное известное устройство позволяет обнаруживать протяженный металлосодержащий объект и определить ориентацию относительно него. Однако для этого необходимо прохождение устройства над протяженным объектом под сравнительно большим углом (более 15o) на постоянной скорости. При малых углах прохождения над протяженным объектом точность определения местонахождения и ориентации относительно объекта очень низкая. К тому же при наличии подводного течения точность определения местонахождения и ориентации относительно объекта также значительно снижается. Все это делает неприемлемым использование такого устройства для отслеживания металлосодержащего протяженного объекта. Кроме того, из-за того, что в качестве излучателя электромагнитного поля используется катушка индуктивности, чувствительность такого устройства при использовании под водой недостаточно высока. Действительно, магнитное поле такого излучателя подчиняется правилу обратно пропорциональности кубу радиуса действия. Объект, в свою очередь, развивает индуцированный дипольный момент, магнитное поле которого также подчиняется правилу обратно пропорциональности кубу расстояния. Из этого вытекает, что вся система детектирования имеет чувствительность, обратно пропорциональную шестой степени расстояния между датчиком и объектом. Этот недостаток сильно ограничивает область использования такого устройства.
Известно также устройство для обнаружения и отслеживания металлосодержащего протяженного подводного объекта с борта подводной поисковой установки, содержащее генератор переменного напряжения и излучатель электромагнитного поля, выполненный в виде двух возбуждающих токовых электродов, установленных в носовой и кормовой частях подводной поисковой установки [2].
Известное устройство обладает более высокой чувствительностью обнаружения металлосодержащих объектов под водой и позволяет обнаруживать объекты, скрытые в донных отложениях.
Данное устройство для обнаружения металлосодержащих подводных объектов по функциональному назначению, своей технической сущности и по достигаемому техническому результату наиболее близко к заявленному устройству для обнаружения и отслеживания металлосодержащего протяженного подводного объекта с борта подводной поисковой установки.
Основным недостатком известного устройства является сложность определения положения устройства относительно протяженного объекта. Определить положение известного устройства относительно металлосодержащего протяженного объекта можно только при многократном прохождении над объектом под разными углами (сигнал максимального уровня возникает при прохождении над протяженным объектом параллельно ему, а при прохождении над объектом под углом, близким к 90o, уровень сигнала может быть небольшим и мало выделяться над уровнем шумов). Кроме того, из-за использования в качестве приемника электромагнитного поля магниточувствительной катушки индуктивности затрудняется применение известного устройства на автономных необитаемых подводных аппаратах (АНПА), оснащенных электродвижителями и другими устройствами - источниками паразитного переменного магнитного поля.
В основу изобретения поставлена задача разработать такое устройство для обнаружения и отслеживания металлосодержащего протяженного подводного объекта с борта подводной поисковой установки, которое позволило бы обнаружить подводный объект во время движения подводной поисковой установки под любым курсовым углом относительно трассы прокладки подводного объекта за один проход, определять положение последней относительно устройства и непрерывно отслеживать трассу прокладки подводного объекта при движении поисковой установки вдоль трассы. Кроме того, устройство должно в максимально возможной степени удовлетворять требованиям применения его с борта такой специфической подводной поисковой установки, как высокоманевренный глубоководный автономный необитаемый подводный аппарат, и надежно работать в его переменных магнитных полях.
Поставленная задача решается тем, что устройство для обнаружения и отслеживания металлосодержащего протяженного подводного объекта с борта подводной поисковой установки, содержащее генератор переменного напряжения и излучатель электромагнитного поля, выполненный в виде двух возбуждающих токовых электродов, установленных в носовой и кормовой частях подводной поисковой установки, дополнительно содержит второй излучатель электромагнитного поля, выполненный в виде двух дополнительных возбуждающих токовых электродов, установленных также в носовой и кормовой частях подводной поисковой установки, два приемника электромагнитного поля в виде четырех приемных электродов, селектор сигналов приемников, два коммутатора и блок управления и преобразования сигналов, при этом возбуждающие токовые электроды расположены в горизонтальной плоскости подводной поисковой установки таким образом, что образуемые ими два электрических диполя повернуты относительно продольной вертикальной осевой плоскости подводной поисковой установки в разные стороны на одинаковый угол, а приемные электроды расположены на подводной поисковой установке так, что образуемые ими два приемных диполя повернуты в разные стороны на одинаковый угол относительно поперечной вертикальной осевой плоскости подводной поисковой установки, возбуждающие электроды через первый коммутатор подключены к выходу генератора переменного напряжения, приемные электроды подключены на входы селектора сигналов приемников, выходы которого через второй коммутатор подключены к первому входу блока управления и преобразования сигналов, второй вход которого соединен с выходом генератора переменного напряжения, управляющие входы коммутаторов подключены к управляющему выходу блока управления и преобразования сигналов. Кроме того, в устройстве блок управления и преобразования сигналов содержит блок компенсации, двухканальный аналого-цифровой преобразователь, информационный канал, вычислительно-управляющий блок, порт последовательной связи, цифроаналоговый преобразователь и фильтр нижних частот, причем первый вход блока управления и преобразования сигналов подключен к первому входу блока компенсации, второй вход которого через информационный канал, цифроаналоговый преобразователь и фильтр нижних частот подключен к информационному выходу вычислительно-управляющего блока, а выход блока компенсации соединен со входом первого канала аналого-цифрового преобразователя, второй вход блока управления и преобразования сигналов подключен ко входу второго канала аналого-цифрового преобразователя, тактовый выход аналого-цифрового преобразователя соединен со входом прерывания вычислительно-управляющего блока, управляющий выход вычислительно-управляющего блока соединен с управляющим выходом блока управления и преобразования сигналов, информационный выход вычислительно-управляющего блока через информационный канал соединен со входом передатчика порта последовательной связи, а информационный вход вычислительно-управляющего блока через информационный канал соединен с выходом приемника порта последовательной связи и с выходами обоих каналов аналого-цифрового преобразователя. В качестве подводной поисковой установки используется автономный необитаемый подводный аппарат.
Согласно второму варианту изобретения в блок управления и преобразования сигналов дополнительно введен второй управляющий выход, а в генератор переменного напряжения дополнительно введен задающий вход, который непосредственно подключен ко второму управляющему выходу блока управления и преобразования сигналов. Кроме того, во втором варианте изобретения блок управления и преобразования сигналов содержит блок компенсации, двухканальный аналого-цифровой преобразователь, информационный канал, вычислительно-управляющий блок, порт последовательной связи, двухканальный цифроаналоговый преобразователь и два фильтра нижних частот, причем первый вход блока управления и преобразования сигналов подключен к первому входу блока компенсации, второй вход которого через информационный канал, первый канал цифроаналогового преобразователя и первый фильтр нижних частот подключен к информационному выходу вычислительно-управляющего блока, выход блока компенсации соединен со входом первого канала аналого-цифрового преобразователя, второй вход блока управления и преобразования сигналов подключен ко входу второго канала аналого- цифрового преобразователя, тактовый выход аналого-цифрового преобразователя соединен со входом прерывания вычислительно-управляющего блока, управляющий выход вычислительно-управляющего блока соединен с управляющим выходом блока управления и преобразования сигналов, информационный выход вычислительно-управляющего блока через информационный канал соединен со входом передатчика порта последовательной связи и входом второго канала цифроаналогового преобразователя, информационный вход вычислительно-управляющего блока через информационный канал соединен с выходом приемника порта последовательной связи и с выходами обоих каналов аналого-цифрового преобразователя, а выход второго канала цифроаналогового преобразователя через второй фильтр нижних частот подключен ко второму управляющему выходу блока управления и преобразования сигналов. В качестве подводной поисковой установки используется автономный необитаемый подводный аппарат.
Объединение двух технических решений в одну заявку связано с тем, что два данных устройства решают одну и ту же задачу, а именно: обнаружение металлосодержащего протяженного подводного объекта и определение положения его трассы прокладки с борта глубоководного высокоманевренного автономного необитаемого подводного аппарата во время его движения за один проход под любым курсовым углом относительно трассы прокладки подводного объекта, а также непрерывное отслеживание прокладки подводного объекта при движении подводного аппарата вдоль этой трассы. Оба устройства являются равноценными для решения поставленной задачи, но не могут быть объединены в один пункт формулы изобретения.
В заявленных устройствах для обнаружения и отслеживания металлосодержащего протяженного подводного объекта с борта подводной поисковой установки общими существенными признаками для этих устройств и для их прототипа являются:
- генератор переменного напряжения;
- излучатель электромагнитного поля, выполненный в виде двух возбуждающих токовых электродов, установленных соответственно в носовой и кормовой частях подводной поисковой установки.
Сопоставительный анализ заявленных устройств для обнаружения и отслеживания металлосодержащего протяженного подводного объекта с борта подводной поисковой установки и прототипа показывает, что первые имеют, в отличие от прототипа, следующие существенные признаки:
- второй излучатель электромагнитного поля, выполненный в виде двух возбуждающих токовых электродов, установленных соответственно в носовой и кормовой частях подводной поисковой установки;
- два приемника электромагнитного поля в виде четырех приемных электродов;
- селектор сигналов приемников;
- два коммутатора;
- блок управления и преобразования сигналов;
- возбуждающие токовые электроды расположены в горизонтальной плоскости подводной поисковой установки таким образом, что образуемые ими два электрических диполя повернуты относительно продольной вертикальной осевой плоскости подводной поисковой установки в разные стороны на одинаковый угол;
- приемные электроды расположены на подводной поисковой установке так, что образуемые ими два приемных диполя повернуты в разные стороны на одинаковый угол относительно поперечной вертикальной осевой плоскости подводной поисковой установки;
- возбуждающие электроды через первый коммутатор подключены к выходу генератора переменного напряжения;
- приемные электроды подключены на входы селектора сигналов приемников, выходы которого через второй коммутатор подключены к первому входу блока управления и преобразования сигналов, второй вход которого соединен с выходом генератора переменного напряжения;
- управляющие входы коммутаторов подключены к управляющему выходу блока управления и преобразования сигналов.
Согласно второму варианту устройства для обнаружения и отслеживания металлосодержащего протяженного подводного объекта с борта подводной поисковой установки в блок управления и преобразования сигналов дополнительно введен второй управляющий выход, а в генератор переменного напряжения дополнительно введен задающий вход, который непосредственно подключен ко второму управляющему выходу блока управления и преобразования сигналов.
Именно такая совокупность всех существенных признаков позволила разработать два равнозначных и надежных в работе варианта устройства для обнаружения и отслеживания металлосодержащего протяженного подводного объекта с борта высокоманевренного глубоководного автономного необитаемого подводного аппарата, причем оба варианта данного устройства в равной степени обеспечивают получение технического результата во всех случаях, на которые распространяется испрашиваемый объем правовой охраны.
Признаки же, указанные ниже, характеризуют оба изобретения лишь в конкретных формах реализации отличительных существенных признаков, но также существенным образом обеспечивают достижение технического результата.
В первом варианте устройства:
- блок управления и преобразования сигналов содержит блок компенсации, двухканальный аналого-цифровой преобразователь, информационный канал, вычислительно-управляющий блок, порт последовательной связи, цифроаналоговый преобразователь и фильтр нижних частот, причем первый вход блока управления и преобразования сигналов подключен к первому входу блока компенсации, второй вход которого через информационный канал, цифроаналоговый преобразователь и фильтр нижних частот подключен к информационному выходу вычислительно-управляющего блока, а выход блока компенсации соединен со входом первого канала аналого-цифрового преобразователя, второй вход блока управления и преобразования сигналов подключен ко входу второго канала аналого-цифрового преобразователя, тактовый выход аналого-цифрового преобразователя соединен со входом прерывания вычислительно-управляющего блока, управляющий выход вычислительно-управляющего блока соединен с управляющим выходом блока управления и преобразования сигналов, информационный выход вычислительно-управляющего блока через информационный канал соединен со входом передатчика порта последовательной связи, а информационный вход вычислительно-управляющего блока через информационный канал соединен с выходом приемника порта последовательной связи и с выходами обоих каналов аналого-цифрового преобразователя;
- в качестве подводной поисковой установки используется автономный необитаемый подводный аппарат.
Во втором варианте устройства:
- блок управления и преобразования сигналов содержит блок компенсации, двухканальный аналого-цифровой преобразователь, информационный канал, вычислительно-управляющий блок, порт последовательной связи, двухканальный цифроаналоговый преобразователь и два фильтра нижних частот, причем первый вход блока управления и преобразования сигналов подключен к первому входу блока компенсации, второй вход которого через информационный канал, первый канал цифроаналогового преобразователя и первый фильтр нижних частот подключен к информационному выходу вычислительно-управляющего блока, выход блока компенсации соединен со входом первого канала аналого-цифрового преобразователя, второй вход блока управления и преобразования сигналов подключен ко входу второго канала аналого-цифрового преобразователя, тактовый выход аналого-цифрового преобразователя соединен со входом прерывания вычислительно-управляющего блока, управляющий выход вычислительно-управляющего блока соединен с управляющим выходом блока управления и преобразования сигналов, информационный выход вычислительно-управляющего блока через информационный канал соединен со входом передатчика порта последовательной связи и входом второго канала цифроаналогового преобразователя, информационный вход вычислительно-управляющего блока через информационный канал соединен с выходом приемника порта последовательной связи и с выходами обоих каналов аналого-цифрового преобразователя, а выход второго канала цифроаналогового преобразователя через второй фильтр нижних частот подключен ко второму управляющему выходу блока управления и преобразования сигналов;
- в качестве подводной поисковой установки используется автономный необитаемый подводный аппарат.
Именно такая совокупность всех существенных признаков позволила разработать два варианта устройства для обнаружения и отслеживания металлосодержащего протяженного подводного объекта с борта подводной поисковой установки. Используя автономный необитаемый подводный аппарат в качестве подводной поисковой установки, оба устройства позволили надежно обнаруживать протяженный подводный объект во время движения подводного аппарата на глубинах до 6000 метров включительно под любым курсовым углом относительно трассы прокладки подводного объекта за один проход, а также точно фиксировать его ориентацию в горизонтальной плоскости относительно продольной оси подводного аппарата и выполнять непрерывное отслеживание протяженного подводного объекта вдоль трассы прокладки. Такой технический результат достигнут заявленными устройствами для обнаружения и отслеживания металлосодержащего протяженного подводного объекта с борта подводной поисковой установки в силу того, что они позволили:
- получить, по меньшей мере, три взаимодополняющих сигнала, позволяющих с высокой достоверностью определить угловое отклонение подводного аппарата от протяженного подводного объекта;
- выработать сигнал, по значениям которого можно за один проход точно определить факт прохождения подводного аппарата над протяженным подводным объектом независимо от угла пересечения последнего подводным аппаратом;
- при движении подводного аппарата вдоль трассы протяженного подводного объекта непрерывно определять угловое и боковое смещения протяженного объекта и по этим показаниям точно удерживать подводный аппарат над протяженным объектом и вести отслеживание последнего.
На основании изложенного можно заключить, что совокупность существенных признаков каждого заявленного изобретения имеет причинно-следственную связь с достигнутым техническим результатом, т.е. благодаря данной совокупности существенных признаков каждого изобретения стало возможным решать поставленную задачу.
Следовательно, заявленные изобретения являются новыми, обладают изобретательским уровнем, т. е. они явным образом не следуют из уровня техники и пригодны для промышленного применения.
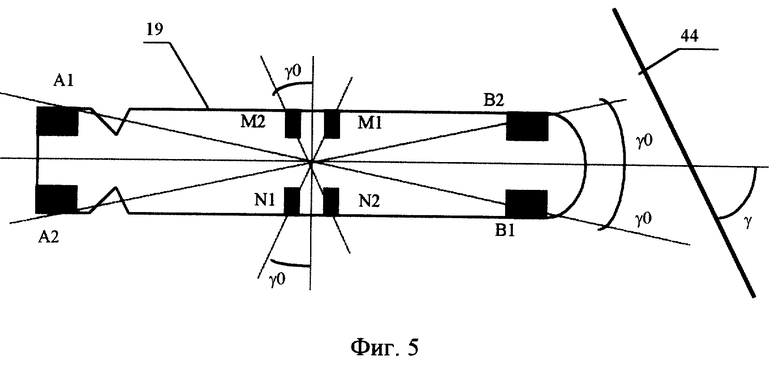
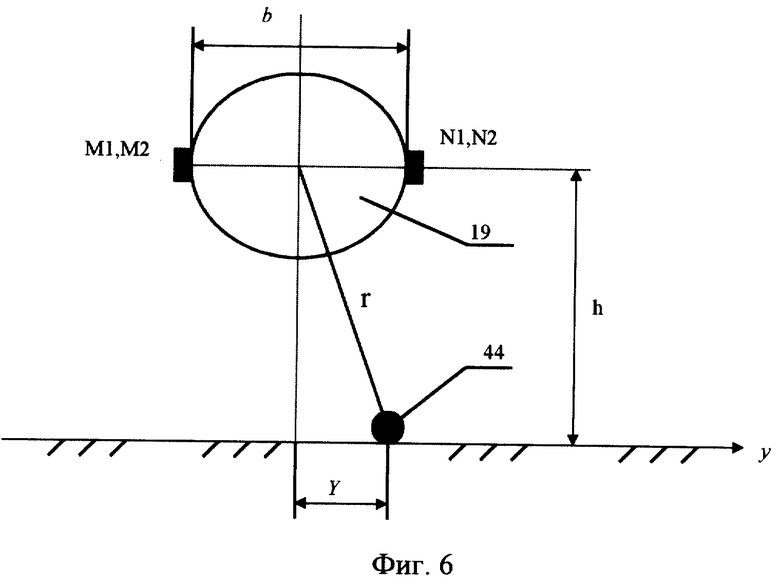
На чертежах представлено: на фиг. 1 изображена блок-схема устройства для обнаружения и отслеживания металлосодержащего протяженного подводного объекта с борта подводной поисковой установки (первый вариант); на фиг. 2 изображена блок-схема блока управления и преобразования сигналов для первого варианта устройства; на фиг. 3 изображена блок-схема устройства для обнаружения и отслеживания металлосодержащего протяженного подводного объекта с борта подводной поисковой установки (второй вариант); на фиг. 4 изображена блок-схема блока управления и преобразования сигналов для второго варианта устройства; на фиг. 5 показан автономный необитаемый подводный аппарат (вид сверху) в момент прохождения над металлосодержащим протяженным подводным объектом при его обнаружении; на фиг. 6 показан автономный необитаемый подводный аппарат (вид сзади) в момент прохождения над металлосодержащим протяженным подводным объектом при его отслеживании.
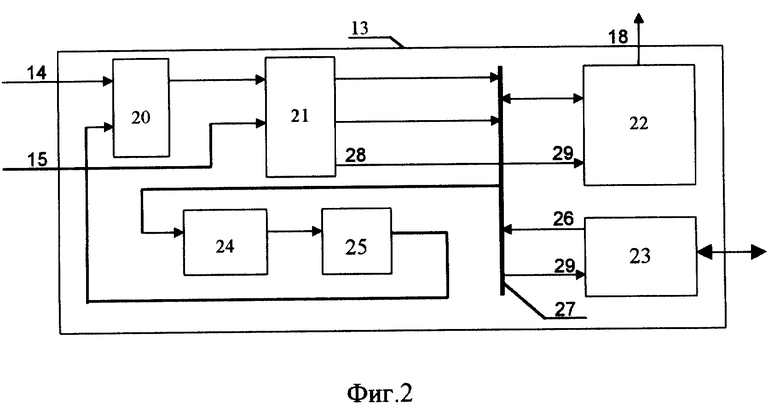
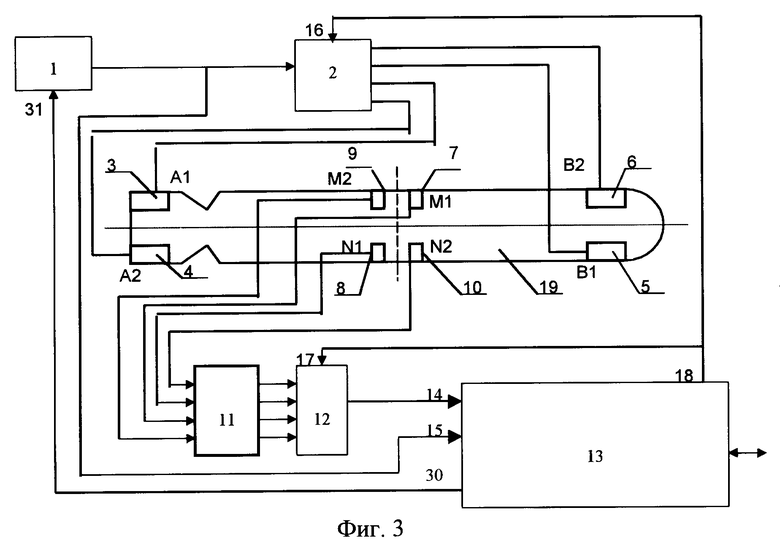
Устройство для обнаружения и отслеживания металлосодержащего протяженного подводного объекта с борта подводной поисковой установки (см. фиг. 1) содержит генератор 1 переменного напряжения, первый коммутатор 2, возбуждающие электроды 3, 4, 5 и 6, приемные электроды 7, 8, 9 и 10, селектор сигналов приемника (ССП) 11, второй коммутатор 12, блок 13 управления и преобразования сигналов (БУПС). Выход ССП 11 соединен с первым входом 14 БУПС 13, второй вход 15 которого подключен к выходу генератора 1, а управляющие входы 16 и 17 соответственно коммутаторов 2 и 12 подключены к управляющему выходу 18 БУПС 13. Возбуждающие электроды 3, 5 и 4, 6 расположены на корпусе подводного аппарата 19 в горизонтальной плоскости таким образом, что образуют два электрических диполя A1~B1 и A2~B2, повернутых относительно продольной вертикальной осевой плоскости подводного аппарата в разные стороны на одинаковый угол γ0. Приемные электроды 7, 8 и 9, 10 расположены на корпусе подводного аппарата в горизонтальной плоскости таким образом, что образуют два электрических диполя M1~N1 и M2~N2, повернутых относительно поперечной вертикальной осевой плоскости подводного аппарата в разные стороны на одинаковый угол γ0. БУПС 13 (см. фиг.2) для первого варианта устройства содержит блок компенсации (БК) 20, двухканальный аналого-цифровой преобразователь (АЦП) 21, вычислительно-управляющий блок (ВУБ) 22, порт последовательной связи (ППС) 23, цифроаналоговый преобразователь (ЦАП) 24 и фильтр нижних частот (ФНЧ) 25. Первый вход БК 20 является первым входом 14 БУПС 13. Выход БК 20 соединен со входом левого канала АЦП 21. Вход правого канала АЦП 21 служит вторым входом 15 БУПС 13. Выходы обоих каналов АЦП 21 и выход 26 приемника ППС 23 подключены через информационный канал 27 к информационному входу ВУБ 22, а тактовый выход 28 АЦП 21 соединен со входом прерывания 29 ВУБ 22. Информационный выход ВУБ 22 через информационный канал 27 подключен ко входу ЦАП 24 и входу 29 передатчика ППС 23. Выход ЦАП 24 через ФНЧ 25 подключен ко второму входу БК 20. АЦП 21 имеет общие для обоих каналов цепи управления (на схеме не показаны), которые обеспечивают их синхронную работу и вырабатывают сигнал на тактовом выходе 28, наличие которого свидетельствует о завершении очередного отсчета аналого-цифрового преобразования в обоих каналах АЦП 21. ФНЧ 25 служит для сглаживания выходного сигнала ЦАП 24, имеющего ступенчатую форму. В целом БУПС выполняет синхронное детектирование, фильтрование и аналого-цифровое преобразование поступающих на его первый вход сигналов переменного напряжения, а также управление коммутаторами устройства. Кроме того, при наличии несимметрии электрических диполей из-за неточностей в установке электродов, наличия постоянных фоновых электромагнитных полей, синфазных с возбуждаемым полем (от рельефа дна и т.п.) при отсутствии протяженного объекта на первом входе БУПС появляется паразитный фоновый сигнал. Для обеспечения возможности достаточного усиления полезного сигнала БУПС выполняет также компенсацию этого паразитного фонового сигнала.
Во втором варианте устройства для обнаружения и отслеживания металлосодержащего протяженного подводного объекта с борта подводной поисковой установки (см. фиг. 3) БУПС 13 дополнительно имеет второй управляющий выход 30, а в генераторе 1 дополнительно введен задающий вход 31, причем второй управляющий выход 30 БУПС 13 соединен с задающим входом 31 генератора 1. Благодаря этому появилась возможность изменять частоту и форму сигнала возбуждаемого электромагнитного поля и расширить таким образом функциональные возможности устройства.
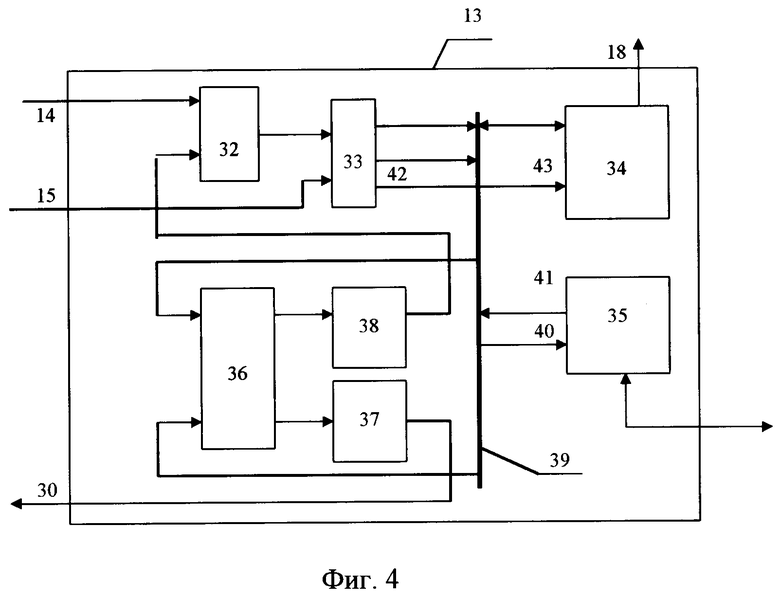
БУПС 13 в таком устройстве состоит из БК 32, двухканального АЦП 33, ВУБ 34, ППС 35, двухканального ЦАП 36, первого 37 и второго 38 фильтров нижних частот. Входы левого и правого каналов ЦАП 36 через информационный канал 39 подключены к информационному выходу ВУБ 34. Выход левого канала ЦАП 36 подключен ко второму входу БК 32 через второй ФНЧ 38, а выход правого канала ЦАП 36 соединен с входом первого ФНЧ 37, выход которого служит вторым управляющим выходом 30 БУПС. Управляющий выход ВУБ 34 является первым управляющим выходом 18 БУПС, а первый вход БК 32 является первым входом 14 БУПС. Вход левого канала АЦП 33 соединен с выходом БК 32, а вход правого канала АЦП 33 является вторым входом 15 БУПС. Выходы левого и правого каналов АЦП 33 подключены на информационный вход ВУБ 34 через информационный канал 39. Вход 40 передатчика ППС 35 через канал 39 подключен к информационному выходу ВУБ 34. Выход 41 приемника ППС 35 через канал 39 соединен с информационным входом ВУБ 34. Левый и правый канал АЦП 33 совершенно одинаковы и имеют общие цепи синхронизации и управления (на схеме не показаны). Тактовый выход 42 АЦП 33 соединен со входом прерывания 43 ВУБ 34. Левый и правый канал ЦАП 36 совершенно одинаковы и имеют общие цепи синхронизации и управления (на схеме не показаны).
Устройство для обнаружения и отслеживания металлосодержащего протяженного подводного объекта с борта подводной поисковой установки работает следующим образом.
Генератор 1 вырабатывает сигнал переменного напряжения, который через коммутатор 2 поочередно подается на возбуждающие электроды 3,5, затем на электроды 4, 6 и, наконец, (параллельно) на обе эти пары электродов.
При этом в первом случае возбуждается электрический диполь A1~B1, ось которого отклонена от продольной вертикальной осевой плоскости подводного аппарата 19 вправо на угол γ0. При этом на приемных электродах 7, 8 возбуждается переменное напряжение UM1~N1, которое после усиления в ССП 11 в виде напряжения U1= Кc • UM1~N1, где Кc - коэффициент передачи ССП 11, через коммутатор 12 поступает на вход 14 БУПС 13. Одновременно с выхода генератора 1 на второй вход БУПС 13 подается напряжение UWsin. БУПС 13 производит синхронное детектирование, фильтрование и преобразование в цифровой эквивалент соответствующего сигнала напряжения с получением его синфазной составляющей
и квадратурной составляющей
где t - текущее время; τ - постоянная времени фильтрации низких частот БУПС 13; UWcos - сигнал, имеющий значение, равное значению сигнала UWsin, смещенного во времени на четверть периода; Kd - коэффициент передачи БУПС 13. Полученные результаты Ulsin Ulcos подаются на выход устройства с помощью передатчика ППС 23.
Во втором случае аналогично возбуждается электрический диполь A2~B2, ось которого отклонена влево от продольной вертикальной осевой плоскости подводного аппарата 19 на угол γ0, на втором выходе ССП 11 вырабатывается сигнал U2 = Kc • UM2~N2, пропорциональный напряжению на приемном диполе M2~N2. Сигнал U2 далее преобразуется в БУПС 13 в компоненты выходного сигнала U2sin и U2cos.
В третьем случае возбуждаются оба электрических диполя A1~B1 и A2~B2, которые образуют суммарный электрический диполь A1, A2~B1, B2, ось которого лежит в вертикальной продольной осевой плоскости подводного аппарата 19. При этом на третьем и четвертом выходах ССП 11 вырабатываются соответственно сигналы U0 = Kc• (UM1~N2 + UM2~N1)/2 и US = Kc•(UM1~N2 - UM2~N1) из напряжений, снимаемых с двух пар приемных электродов 7,10 и 9,8. Указанные сигналы поочередно через коммутатор 12 передаются в БУПС 13, где затем преобразуются соответственно в компоненты выходных сигналов U0sin, U0cos и USsin, UScos.
Управление коммутаторами 2 и 12 осуществляется сигналами с управляющего выхода 18 БУПС 13.
При отсутствии металлосодержащего протяженного подводного объекта 44 вблизи подводного аппарата 19 (в зоне обнаружения) и при полной симметрии электромагнитного поля относительно продольной вертикальной осевой плоскости возбуждаемого диполя входные сигналы UM1~N1, UM2~N2, UM1~N2, UM2~N1 равны нулю, благодаря симметричному расположению приемных электродов относительно оси возбуждаемого электрического диполя и вырабатываемые устройством выходные сигналы U0sin, USsin, U1sin, U2sin, U0cos, UScos, U1cos, U2cos также равны нулю.
Общеизвестно, что силовые линии электрического поля, наведенного в протяженном подводном объекте, направлены вдоль протяженного объекта. Поэтому при прохождении вблизи и над протяженным объектом 44 (см.фиг. 5, 6) для сигналов устройства (на выходах ССП 11) будут справедливы следующие выражения:
U1 = Ks * r-5 * sin(γ+γ0),
U2 = Ks * r-5 * sin(γ-γ0),
U0 = Ks * r-5 * sinγ,
US = Kb • r-7 • b • Y
где коэффициент Ks = k1 • k2 •I/2; k1- постоянный коэффициент, зависящий от конструктивных данных и свойств протяженного объекта; k2 - постоянный коэффициент, характеризующий приемный диполь; I - ток в возбуждающем диполе; r - расстояние от диполя до протяженного объекта, γ - угол между вертикальной осевой плоскостью подводного аппарата и продольной осью протяженного объекта; Kb = 2• k1 • K3 • I; K3 - конструктивный коэффициент; b - расстояние между электродами М и N; Y - отклонение подводного аппарата от протяженного объекта в поперечном направлении. На выходе устройства вырабатываются соответственно сигналы 
 где Kp - коэффициент передачи блока управления и преобразования сигналов 13. По сигналам U1 и U2 можно оценить как угол γ: γS = 0,5 * arctg(US1US2), так и получить сигнал, резко выделяющийся на фоне возбужденного электромагнитного поля:
где Kp - коэффициент передачи блока управления и преобразования сигналов 13. По сигналам U1 и U2 можно оценить как угол γ: γS = 0,5 * arctg(US1US2), так и получить сигнал, резко выделяющийся на фоне возбужденного электромагнитного поля:  где US1 = (U1+U2)/cos(2*γ0) = 2 * KS* sin(2*γ), US2 = (U1-U2)/sin(2*γ0) = 2 * KS* cos(2*γ). По сигналу Vm судят о наличии в зоне обнаружения протяженного объекта, а по оценке γS определяют его ориентацию относительно вертикальной осевой плоскости подводного аппарата 19. Отслеживание подводного протяженного объекта осуществляется путем постоянного удержания подводного аппарата 19 точно над трассой протяженного объекта 44. Для этого измеряют боковое Y (по сигналу US) и угловое смещение γ (по сигналам U0, U1, U2) подводного аппарата 19 относительно протяженного объекта 44 и по их значениям корректируют программу управления движением подводного аппарата 19 по трассе прокладки протяженного объекта 44.
где US1 = (U1+U2)/cos(2*γ0) = 2 * KS* sin(2*γ), US2 = (U1-U2)/sin(2*γ0) = 2 * KS* cos(2*γ). По сигналу Vm судят о наличии в зоне обнаружения протяженного объекта, а по оценке γS определяют его ориентацию относительно вертикальной осевой плоскости подводного аппарата 19. Отслеживание подводного протяженного объекта осуществляется путем постоянного удержания подводного аппарата 19 точно над трассой протяженного объекта 44. Для этого измеряют боковое Y (по сигналу US) и угловое смещение γ (по сигналам U0, U1, U2) подводного аппарата 19 относительно протяженного объекта 44 и по их значениям корректируют программу управления движением подводного аппарата 19 по трассе прокладки протяженного объекта 44.
Перед поиском протяженного объекта 44 после погружения подводного аппарата 19 на заданную глубину в БУПС 13 вырабатываются сигналы компенсации U1C, U2C, U0C, USC соответственно для каждого измеряемого сигнала U1, U2, U0 и US. Осуществляется это следующим образом. По команде "Компенсация", принятой приемником ППС 23 от центрального процессора подводного аппарата (на схемах не показан) и переданной в ВУБ 22 через информационный канал 27, ВУБ 22 переходит к выполнению программной процедуры "Компенсация". При этом на управляющем выходе 18 БУПС 13 вырабатывается управляющий сигнал D1, который подается на управляющие входы коммутаторов 2 и 12. По этому сигналу с помощью первого коммутатора 2 к выходу генератора 1 подключаются излучающие электроды 3, 5 и возбуждается электрический диполь A1~B1, а с помощью коммутатора 12 на первый вход 14 БУПС 13 и, соответственно, на первый вход БК 20 подается сигнал Ul, вырабатываемый ССП 11 из полученного с приемного диполя M1~ N1 напряжения UM1~N1. На второй вход БК 20 из ВУБ 22 через информационный канал 27, ЦАП 24 и ФНЧ 25 одновременно подается сигнал
Uci = - {(UCsin(i-1)+UCsini/n)•UWsin + (UCcos(i-1)+UCcosi/n)•UWcos} (3)
(в начале процедуры UCsin=0, UCcos=0), где UCsini - значение синфазной составляющей измеряемого сигнала на данном такте работы i, вычисленное по получаемым с выхода левого канала АЦП значениям сигнала Ux = Ku•U1+Km•Uc на выходе блока компенсации 21:
составляющей измеряемого сигнала; Ku - коэффициент передачи блока компенсации для сигналов на первом входе БК 20; Km - коэффициент передачи блока компенсации для сигналов на втором входе БК 20; UWsin - значение цифрового эквивалента сигнала напряжения генератора 1, получаемого на выходе правого канала АЦП 21 при текущем отсчете; UWcos - значение цифрового эквивалента сигнала напряжения генератора 1, получаемое на выходе правого канала АЦП 21 при отсчете, смещенном от текущего на четверть периода (90o) сигнала UWsin; n - постоянное число. По завершении каждого отсчета АЦП 21 на его тактовом выходе 28 вырабатывается сигнал, который передается на вход прерывания 29 ВУБ 22 и инициирует выполнение подпрограммы обработки очередного прерывания, с помощью которой осуществляются необходимые вычисления, принимаются данные с выходов каналов АЦП 21 и передаются данные на ЦАП 24. Процедура компенсации для сигнала U1 выполняется до тех пор, пока уровень напряжения Ux на выходе БК 20 не станет ниже заданного значения (ошибки)  < Ue. Полученные при этом значения компонент сигнала компенсации U1Csin = UCsin и U1Ccos = UCcos запоминаются в оперативной памяти ВУБ 22, и в дальнейшем используются для формирования сигнала U1C = - (U1Csin•UWsin+U1Ccos•UWcos), подаваемого на второй вход БК 20 при измерении сигнала U1. Аналогичным образом далее определяются компоненты сигналов компенсации U2C, U0C, USC при подаче на управляющие входы коммутаторов соответственно сигналов D2, D0, DS:
< Ue. Полученные при этом значения компонент сигнала компенсации U1Csin = UCsin и U1Ccos = UCcos запоминаются в оперативной памяти ВУБ 22, и в дальнейшем используются для формирования сигнала U1C = - (U1Csin•UWsin+U1Ccos•UWcos), подаваемого на второй вход БК 20 при измерении сигнала U1. Аналогичным образом далее определяются компоненты сигналов компенсации U2C, U0C, USC при подаче на управляющие входы коммутаторов соответственно сигналов D2, D0, DS:
- при подаче сигнала D2 возбуждается диполь A2~B2, через второй коммутатор 12 на первый вход 14 БУПС 13 подается сигнал U2 и в БУПС 13 вырабатывается сигнал U2C;
- при выработке на управляющем выходе 18 БУПС сигналов D0 и DS возбуждается диполь A1,A2~B1,B2, на первый вход 14 БУПС 13 через второй коммутатор 12 подаются поочередно соответственно сигналы U0 и US, а в БУПС 13 определяются значения U0C и USC, соответствующие этим сигналам. На этом процедура "Компенсации" завершается и устройство возвращается к выполнению основной программы измерения. При этом постоянно действующие паразитные "фоновые" сигналы на первом входе 14 БУПС 13 (и на первом входе БК 20), возникающие из-за неточности в установке электродов (несимметрии электрических полей излучаемых и приемных диполей), особенностей рельефа дна (например, наличия уклона) и т. п. факторов, оказываются скомпенсированными и на выходе БК 20 отсутствуют. Таким образом, благодаря отсутствию в выходном сигнале БК 20 "фоновой" составляющей и дополнительному усилению полезного сигнала (блоком компенсации) обеспечивается необходимая избирательность и чувствительность устройства, а благодаря тому, что синхронное детектирование и фильтрация осуществляются программными средствами (в блоке ВУБ 22), обеспечивается необходимая точность измерений. По мере изменения фоновых сигналов процедура "Компенсации" может повторяться или осуществляться непрерывно с большой постоянной времени (при достаточно большом значении n, см. выр.<3>) одновременно с процессом измерения сигналов U1, U2, U0, US. В последнем случае значения U1C, U2C, U0C, USC постоянно корректируются, отслеживая и компенсируя медленно меняющийся "фоновый" сигнал.
Отличительными особенностями в работе второго варианта устройства для обнаружения и отслеживания металлосодержащего протяженного подводного объекта с борта подводной поисковой установки, обеспечивающего возможность изменения частоты и формы возбуждаемого электрического поля (см. фиг. 3), являются следующие. По приему от управляющего центрального процессора подводного аппарата (на схемах не показан) команды на изменение частоты и/или формы возбуждаемого электромагнитного поля на втором управляющем выходе 30 БУПС 13 вырабатывается соответствующий задающий сигнал, по которому на выходе генератора 1 вырабатывается переменное напряжение заданной частоты и формы. Это напряжение подается на излучающие электроды, возбуждая электромагнитное поле заданной частоты. В ВУБ 34 при этом вырабатываются дискретные отсчеты, задающие форму сигнала (например, синусоиду), которые через информационный канал 39 передаются на вход правого канала ЦАП 36. Аналоговый сигнал с выхода правого канала ЦАП 36 после сглаживания первым ФНЧ 37 подается на второй управляющий выход 30 БУПС. Сигнал переменного напряжения U1 (U2, U0, US) с первого входа 14 БУПС 13 подается на первый вход БК 32. Одновременно на второй вход БК 32 подается сигнал компенсации U1C (U2C, U0C, USC) (см. <3>) и на выходе БК 32 вырабатывается сигнал, не содержащий паразитной фоновой составляющей. Этот сигнал далее с помощью левого канала АЦП 33 преобразуется в цифровой вид и передается в ВУБ 34 по информационному каналу 39. Одновременно сигнал UWsin со второго входа 15 БУПС 13 с помощью правого канала АЦП 33 также преобразуется в цифровой вид и передается в ВУБ 34 по информационному каналу 39. В ВУБ 34 вычисляются синфазная U1sin (U2sin, U0sin, USsin) по формуле <1> и квадратурная U1cos (U2cos, U0cos, UScos) по формуле <2> составляющие измеряемого сигнала и через канал 39 с помощью передатчика ППС 35 подаются на выход устройства.
Для изменения частоты или формы возбуждаемого электрического поля достаточно заменить один массив данных, задающих форму сигнала на выходе генератора 1, другим. Для изменения частоты в кратное число раз достаточно изменить шаг в цикле вывода массива. Например, при изменении шага с 1 на 2 частота переменного напряжения на выходе генератора возрастет в два раза.
Институтом проведены лабораторные и натурные морские испытания каждого варианта устройства для обнаружения и отслеживания металлосодержащего протяженного подводного объекта с борта автономного необитаемого подводного аппарата. Как показали результаты испытаний, оба варианта устройства позволили решить поставленную задачу, а именно:
- обнаруживать с высокой точностью протяженный подводный объект непосредственно во время движения подводного аппарата под любым курсовым углом относительно трассы прокладки подводного объекта за один проход и определять его ориентацию;
- непрерывно и устойчиво вырабатывать сигналы, необходимые для отслеживания трассы прокладки протяженного подводного объекта в процессе движения подводного аппарата вдоль трассы.
Кроме того, в процессе испытаний установлено, что оба устройства в высокой степени удовлетворяют требованиям применения их с борта такой специфической подводной поисковой установки, как высокоманевренный глубоководный автономный необитаемый подводный аппарат, и надежно работают в его переменных магнитных полях.
Источники информации
1. СССР, авторское свидетельство N 606150, МКИ2 G 01 V 3/08, 1978 (опубл. 05.05.78 г. в бюл. N 17).
2. США, патент N 5430380, МКИ6 G 01 V 3/02, G 01 V 3/04, G 01 V 3/06, G 01 V 3/08, 1995 год - прототип.
Изобретение относится к области электромагнитных исследований и может быть использовано преимущественно для поиска, обнаружения, распознавания и отслеживания трасс подвижных металлосодержащих протяженных объектов, в том числе и заиленных в донный грунт, например, подводных трубопроводов, силовых кабелей и т.д. Устройство содержит генератор переменного напряжения и излучатель электромагнитного поля, выполненный в виде двух пар возбуждающих токовых электродов, установленных в носовой и кормовой частях подводной поисковой установки, два приемника электромагнитного поля в виде четырех приемных электродов, селектор сигналов приемников, два коммутатора и блок управления и преобразования сигналов. Возбуждающие токовые электроды расположены в горизонтальной плоскости подводной поисковой установки таким образом, что образуемые ими два электрических диполя повернуты относительно продольной вертикальной осевой плоскости подводной поисковой установки в разные стороны на одинаковый угол. Приемные электроды расположены на подводной поисковой установке так, что образуемые ими два приемных диполя повернуты в разные стороны на одинаковый угол относительно поперечной вертикальной осевой плоскости подводной поисковой установки. Возбуждающие электроды через первый коммутатор подключены к выходу генератора переменного напряжения, приемные электроды подключены на входы селектора сигналов приемников, выходы которого через второй коммутатор подключены к первому входу блока управления и преобразования сигналов, второй вход которого соединен с выходом генератора переменного напряжения, управляющие входы коммутаторов подключены к управляющему выходу блока управления и преобразования сигналов. Согласно второму варианту устройства в его блок управления и преобразования сигналов дополнительно введены второй управляющий выход, а в генератор переменного напряжения дополнительно введен задающий вход, который непосредственно подключен ко второму выходу блока управления и преобразования сигналов. Технический результат: возможность обнаружить с высокой точностью металлосодержащий протяженный подводный объект непосредственно во время движения подводного аппарата под любым курсовым углом относительно трассы протяженного объекта за один проход и определить его ориентацию; возможность непрерывно отслеживать трассу подкладки протяженного объекта в процессе движения подводного аппарата вдоль трассы. 2 с. и 4 з.п.ф-лы, 6 ил.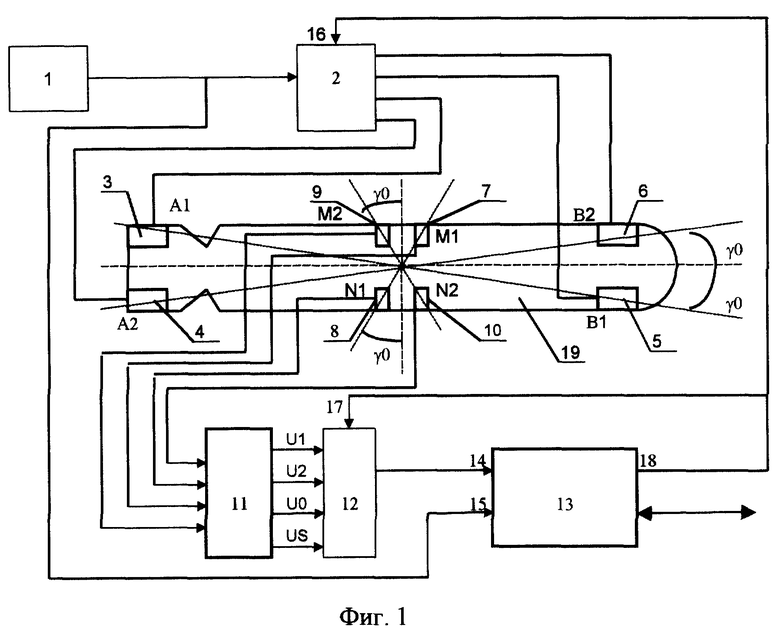
| US 5430380, 04.07.1995 | |||
| СПОСОБ ОБНАРУЖЕНИЯ И ОТСЛЕЖИВАНИЯ ЭЛЕКТРОПРОВОДНОГО ПРОТЯЖЕННОГО ПОДВОДНОГО ОБЪЕКТА С БОРТА ПОДВОДНОЙ ПОИСКОВОЙ УСТАНОВКИ | 1998 |
|
RU2136020C1 |
| Способ распознавания инородных предметов и материалов в потоке ископаемого | 1985 |
|
SU1365006A1 |
| Устройство для определения трассы прокладки протяженного проводника | 1976 |
|
SU606150A1 |
| US 4467247, 21.08.1984 | |||
| US 3835371, 10.09.1974. | |||

