Текст описания в факсимильном виде (см. графическую часть)о
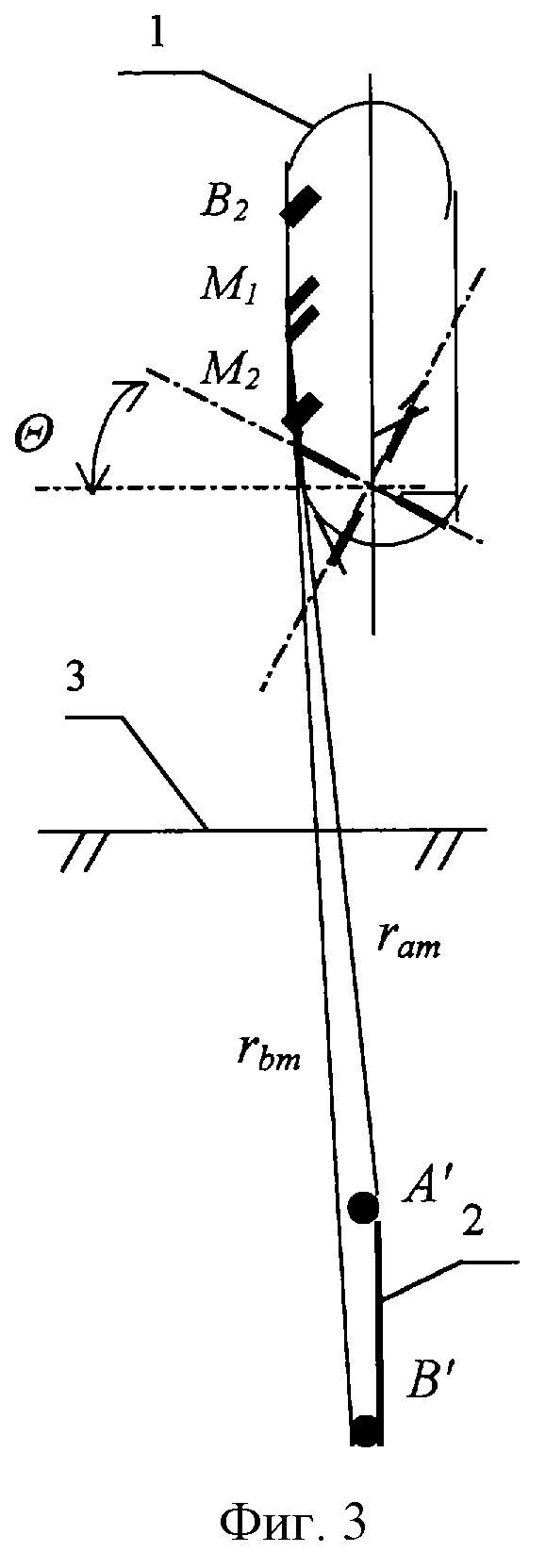
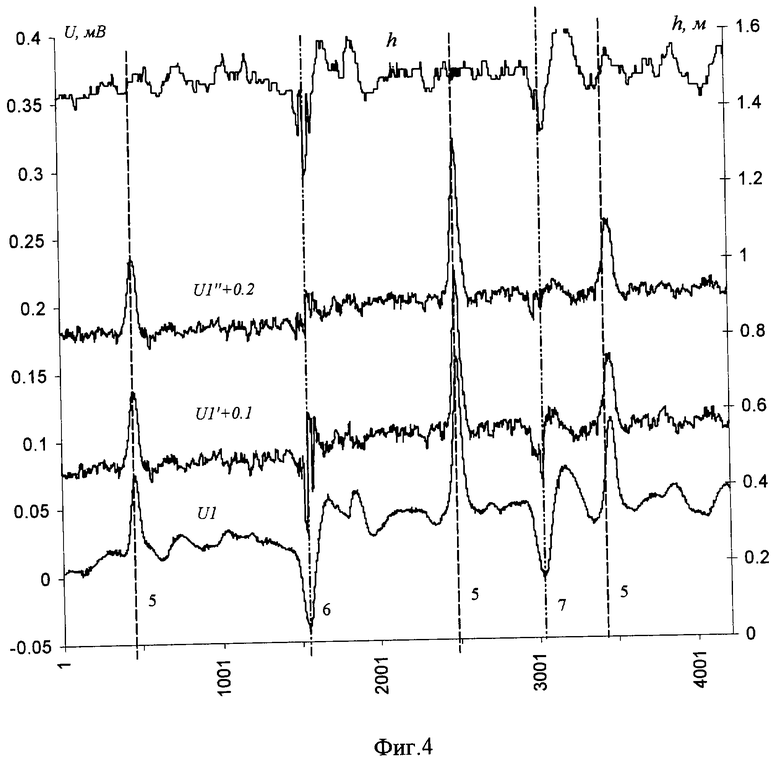
Изобретение относится к области электромагнитных исследований и может быть использовано преимущественно для поиска, обнаружения, распознавания и отслеживания трасс подводных протяженных металлосодержащих объектов, в том числе и заиленных в донный грунт, например подводных трубопроводов, силовых кабелей и т.д. Сущность: способ включает возбуждение электромагнитного поля дипольным источником излучения последовательно по меньшей мере по трем направлениям: первоначально вдоль продольной оси подводного аппарата по направлению его движения, а затем со смещением в одну и другую стороны от диаметральной плоскости подводного аппарата в плоскости, параллельной его основной плоскости, измерение вторичного электромагнитного поля по меньшей мере в четырех точках подводного аппарата приемными диполями, формирование вторичных сигналов, по величине и изменению которых во время движения подводного аппарата судят о наличии протяженного подводного объекта. Фиксируют моменты пересечения трассы его прокладки, определяют угловое отклонение и боковое смещение подводного аппарата от трассы прокладки подводного протяженного объекта при его отслеживании. Непосредственно перед началом поиска и обнаружения электропроводного протяженного объекта в месте района поиска, где отсутствуют электропроводные объекты, определяют зависимость сигналов на приемных электрических диполях от изменений положения подводного аппарата относительно дна. При поиске и отслеживании электропроводного протяженного подводного объекта сигналы с приемных диполей корректируют с учетом этой зависимости и в скорректированном виде используют для формирования вторичных сигналов. Технический результат: устраняются погрешности в определении моментов пересечения подводного объекта, углового отклонения и бокового смещения подводного аппарата от трассы его прокладки. 5 з.п.ф-лы, 4 ил.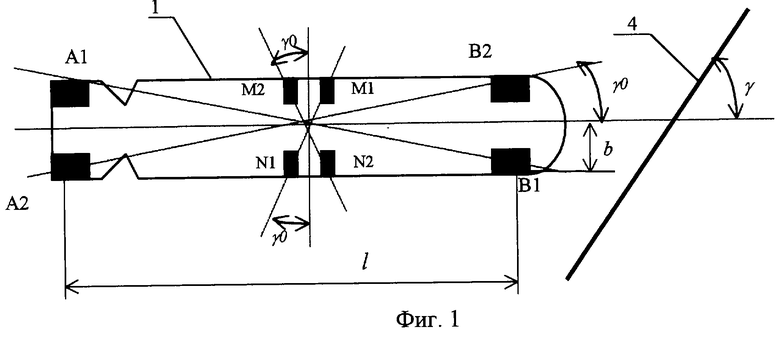
1. Способ обнаружения и отслеживания электропроводного протяженного подводного объекта с борта автономного необитаемого подводного аппарата, на котором точки излучения и измерения электромагнитного поля располагают по бортам вдоль подводного аппарата непосредственно на его формообразующей поверхности, включающий возбуждение электромагнитного поля дипольным источником излучения последовательно по меньшей мере по трем направлениям первоначально вдоль продольной оси подводного аппарата по направлению его движения, а затем со смещением в одну и другую стороны от диаметральной плоскости подводного аппарата в плоскости, параллельной его основной плоскости, измерение электромагнитного поля по меньшей мере в четырех точках подводного аппарата приемными диполями, формирование по результатам этих измерений вторичных сигналов, по величине и изменению которых во время движения подводного аппарата судят о наличии электропроводного протяженного подводного объекта, фиксируют моменты пересечения трассы его прокладки, определяют угловое отклонение и боковое смещение подводного аппарата от трассы прокладки электропроводного подводного протяженного объекта при его отслеживании, отличающийся тем, что перед началом поиска, обнаружения и отслеживания электропроводного протяженного подводного объекта непосредственно в районе поиска выбирают участок моря, на дне которого отсутствуют электропроводные объекты, перемещают на этот участок моря на заданную высоту над дном подводный аппарат, и приводят его в движение по заданному курсу, во время которого изменяют положение подводного аппарата относительно дна моря, при этом на всем пути такого движения подводного аппарата возбуждают электромагнитное поле дипольными источниками излучения, синхронно измеряют и записывают сигналы на приемных диполях, высоту подводного аппарата над поверхностью дна моря и его угловое положение, по завершении движения подводного аппарата по записанным данным определяют аналитические зависимости сигналов на приемных диполях от изменений положения подводного аппарата относительно дна моря при отсутствии на дне электропроводных объектов, а затем при осуществлении поиска, обнаружения и отслеживания электропроводного протяженного подводного объекта измеренные на приемных диполях сигналы корректируют с учетом этих зависимостей, и в скорректированном виде используют для формирования вторичных сигналов. 2. Способ по п. 1, отличающийся тем, что высоту над дном выбранного участка моря, до которой перемещают подводный аппарат, задают равной высоте над дном моря, на которой будут осуществлять поиск, обнаружение и отслеживание электропроводного протяженного подводного объекта. 3. Способ по п. 1, отличающийся тем, что при движении подводного аппарата на выбранном участке моря его положение относительно дна моря изменяют сначала путем погружения до высоты на 20-25% ниже заданной, после чего всплытием до высоты на 20-25% выше заданной и возвращением на заданную высоту над дном моря, а затем поворотом подводного аппарата от заданного курса сначала влево на угол 25-40o и возвращением на прежний курс, а затем вправо на такой же угол с последующим возвращением на заданный курс. 4. Способ по п. 1, отличающийся тем, что при движении подводного аппарата с изменением его положения относительно дна моря возбуждение электромагнитного поля дипольными источниками излучения выполняют последовательно по меньшей мере по трем направлениям, первоначально вдоль оси подводного аппарата по направлению движения, а затем со смещением в одну и другую стороны от диаметральной плоскости подводного аппарата в плоскости, параллельной его основной плоскости, а измеряют электромагнитное поле по меньшей мере в четырех точках подводного аппарата. 5. Способ по п. 1, отличающийся тем, что измерение углового положения подводного аппарата осуществляют путем измерения его крена и дифферента. 6. Способ по п. 1, отличающийся тем, что значения скорректированных сигналов, которые используются для формирования вторичных сигналов, находят путем вычитания из измеренных значений сигналов на приемных диполях значений соответствующих определенных аналитических зависимостей для полученных на данный момент показаний датчиков положения подводного аппарата.