Изобретение относится к области электромагнитных исследований и может быть использовано, преимущественно, для поиска, обнаружения и отслеживания трасс подводных протяженных металлосодержащих объектов, в том числе и заиленных в донный грунт, например, подводных трубопроводов, подводных кабелей и т.п. с борта подводной поисковой установки.
Известно устройство для обнаружения и отслеживания металлосодержащего протяженного подводного объекта с борта подводной поисковой установки (Патент РФ №2174244, МПК 7 G01V 3/08 (2000.01), опуб. 27.09.2001 Бюл. №27, второй вариант). Известное устройство содержит два излучателя электромагнитного поля, каждый из которых выполнен в виде двух возбуждающих токовых электродов, установленных в носовой и кормовой частях подводной поисковой установки, два приемника электромагнитного поля в виде четырех приемных электродов, генератор переменного напряжения, два коммутатора, селектор сигналов приемника, а также блок управления и преобразования сигналов (БУПС). Возбуждающие токовые электроды образуют в горизонтальной плоскости два электрических диполя, которые повернуты в разные стороны относительно продольной вертикальной осевой плоскости подводной поисковой установки на одинаковый угол, а приемные электроды образуют, также в горизонтальной плоскости, два приемных диполя, повернутых в разные стороны относительно поперечной вертикальной осевой плоскости поисковой установки. Возбуждающие электроды подключены через первый коммутатор к выходу генератора переменного напряжения, а приемные электроды подключены к входам селектора сигналов приемника (ССП) и через второй коммутатор соединены с первым входом БУПС. Выход генератора переменного напряжения соединен также со вторым входом БУПС. Первый выход БУПС подключен на управляющие входы первого и второго коммутаторов, а второй выход БУПС соединен с задающим входом генератора переменного напряжения.
Первым недостатком известного устройства является изменение напряжений, наводящихся на приемных электродах, в зависимости от изменения электропроводности донного грунта и окружающей воды, а также от расстояния между подводной поисковой установкой и грунтом. От этих условий зависит значение тока и напряженность электрического поля, инициируемых возбуждающими электродами и, как следствие, уровень ответной реакции подводного протяженного металлосодержащего объекта в виде возмущения электрического поля.
Второй недостаток известного устройства связан с тем, что отсутствует контроль уровня напряжения в селекторе сигналов приемника. При любых условиях работы усилители селектора сигналов приемника должны находиться в линейном режиме работы и при этом их коэффициент усиления должен быть максимально возможным. Нарушение этого требования приводит к увеличению ошибки в обнаружении и отслеживании подводного металлосодержащего объекта.
Известно устройство для обнаружения и отслеживания металлосодержащего протяженного подводного объекта с борта автономного необитаемого подводного аппарата (Патент РФ № 2672775, МПК 7 G01V 3/08 (2000.01), опуб. 19.11.2018 Бюл. № 32 – прототип), наиболее близкое по своей технической сущности и по достигаемому результату к заявляемому устройству.
Устройство для обнаружения и отслеживания металлосодержащего протяженного подводного объекта с борта подводной поисковой установки, преимущественно автономного необитаемого подводного аппарата (АНПА), содержит два излучающих диполя электромагнитного поля, каждый из которых выполнен в виде двух возбуждающих электродов, установленных в кормовой и носовой частях АНПА соответственно, два приемных диполя электромагнитного поля в виде четырех приемных электродов, генератор переменного напряжения, первый и второй коммутаторы, блок нормализатора сигналов с управляемым коэффициентом усиления, управляемый аттенюатор, измерительный преобразователь тока, а также блок управления и преобразования сигналов (БУПС), при этом возбуждающие электроды через первый коммутатор, измерительный преобразователь тока и аттенюатор подключены к выходу генератора переменного напряжения, выход генератора переменного напряжения соединен также со вторым входом БУПС, при этом первый выход БУПС подключен на управляющие входы первого и второго коммутаторов, а также к управляющему входу блока нормализатора сигналов. Второй выход БУПС соединен с задающим входом генератора переменного напряжения, при этом БУПС состоит из блока компенсации, двухканального аналого-цифрового преобразователя (АЦП), вычислительно-управляющего блока (ВУБ), двухканального цифро-аналогового преобразователя (ЦАП), первого и второго фильтров низких частот (ФНЧ1) и (ФНЧ2) соответственно, порта последовательной связи (ППС) и информационного канала. Выход первого канала ЦАП через ФНЧ2 подключен ко второму входу блока компенсации, выход второго канала ЦАП соединен с входом ФНЧ1, выход которого является вторым выходом БУПС, управляющий выход ВУБ является первым выходом БУПС, первый вход блока компенсации является первым входом БУПС, а вход второго канала АЦП является вторым входом БУПС. Вход первого канала АЦП соединен с выходом блока компенсации, при этом через информационный канал организована связь ВУБ с выходами АЦП, с портом последовательной связи, а также с входами ЦАП, причем первый и второй каналы АЦП идентичны и имеют общие цепи синхронизации и управления, первый и второй каналы ЦАП также идентичны и имеют общие цепи синхронизации и управления, а тактовый выход АЦП соединен с входом прерывания ВУБ, в котором второй управляющий выход и второй вход являются третьим выходом БУПС и третьим входом БУПС соответственно. Управляющий вход управляемого аттенюатора соединен с третьим выходом БУПС, выход измерительного преобразователя тока соединен с третьим входом БУПС, приемные электроды соединены с входами блока нормализатора сигналов, а его выходы последовательно через второй коммутатор, первый вход БУПС и информационный канал связаны с ВУБ, кроме этого порт последовательной связи через канал обмена связан с системой управления движением АНПА. Возбуждающие токовые электроды расположены в горизонтальной плоскости АНПА таким образом, что образуемые ими два излучающих электрических диполя повернуты в разные стороны относительно продольной вертикальной осевой плоскости АНПА на одинаковый угол, а приемные электроды расположены на АНПА так, что образуемые ими два приемных диполя повернуты в разные стороны относительно поперечной вертикальной осевой плоскости АНПА, причем приемные электроды каждого приемного диполя установлены на АНПА в местах, где разница потенциалов на приемном диполе, наводимая соответствующим излучающим диполем, близка к нулевому значению.
Недостатком известного устройства является снижение чувствительности к возмущениям активированного электромагнитного поля в воде и уменьшение значений полезных сигналов при малых углах пересечения направления движения АНПА с направлением прокладки подводного металлосодержащего протяженного объекта. Это приводит к увеличению ошибки определения взаимного положения АНПА как подводной поисковой установки и подводного объекта, что вызывает повышение колебательности траектории движения АНПА и затрудняет отслеживание подводного объекта. Вместе с тем, известно, что максимального значения сигналы на приемных диполях достигают при указанном угле пересечения в диапазоне 30 ... 50 градусов. (Агеев М.Д., Кукарских А.К. Электромагнитный гидролокатор для обнаружения и отслеживания протяженных объектов с борта АНПА. / В сб.: Морские технологии, вып.4, Владивосток, Дальнаука, 2001. С 71 – 90).
Задачей, на решение которой направлено предлагаемое изобретение, является создание устройства, обеспечивающего повышение точности отслеживания и уменьшение амплитуды колебаний траектории подводной поисковой установки при ее движении вдоль протяженного подводного металлосодержащего объекта за счет повышения достоверности его обнаружения и точности обработки сигналов с приемных электродов.
Поставленная задача достигается тем, что в устройство для обнаружения и отслеживания металлосодержащего протяженного подводного объекта (ПО) с борта подводной поисковой установки (ППУ), содержащее два излучающих диполя электромагнитного поля, каждый из которых выполнен в виде двух возбуждающих электродов, установленных в кормовой и носовой частях ППУ соответственно, два приемных диполя электромагнитного поля в виде четырех приемных электродов, генератор переменного напряжения, первый и второй коммутаторы, блок нормализатора сигналов с управляемым коэффициентом усиления, управляемый аттенюатор, измерительный преобразователь тока, а также блок управления и преобразования сигналов (БУПС), при этом возбуждающие электроды через первый коммутатор, измерительный преобразователь тока и аттенюатор подключены к выходу генератора переменного напряжения, выход генератора переменного напряжения соединен также со вторым входом БУПС, при этом первый выход БУПС подключен на управляющие входы первого и второго коммутаторов, а также к управляющему входу блока нормализатора сигналов, второй выход БУПС соединен с задающим входом генератора переменного напряжения, при этом БУПС состоит из блока компенсации, двухканального аналого-цифрового преобразователя (АЦП), вычислительно-управляющего блока (ВУБ), двухканального цифро-аналогового преобразователя (ЦАП), первого и второго фильтров низких частот (ФНЧ1) и (ФНЧ2) соответственно, порта последовательной связи и информационного канала, выход первого канала ЦАП через ФНЧ2 подключен ко второму входу блока компенсации, выход второго канала ЦАП соединен с входом ФНЧ1, выход которого является вторым выходом БУПС, управляющий выход ВУБ является первым выходом БУПС, первый вход блока компенсации является первым входом БУПС, а вход второго канала АЦП является вторым входом БУПС, вход первого канала АЦП соединен с выходом блока компенсации, при этом через информационный канал организована связь ВУБ с выходами АЦП, с портом последовательной связи, а также с входами ЦАП, причем первый и второй каналы АЦП идентичны и имеют общие цепи синхронизации и управления, первый и второй каналы ЦАП также идентичны и имеют общие цепи синхронизации и управления, а тактовый выход АЦП соединен с входом прерывания ВУБ, в котором второй управляющий выход и второй вход являются третьим выходом БУПС и третьим входом БУПС соответственно, управляющий вход управляемого аттенюатора соединен с третьим выходом БУПС, выход измерительного преобразователя тока соединен с третьим входом БУПС, приемные электроды соединены с входами блока нормализатора сигналов, а его выходы последовательно через второй коммутатор, первый вход БУПС и информационный канал связаны с ВУБ, кроме этого порт последовательной связи через канал обмена связан с системой управления движением ППУ, причем возбуждающие электроды расположены в горизонтальной плоскости ППУ таким образом, что образуемые ими два излучающих электрических диполя повернуты в разные стороны относительно продольной вертикальной осевой плоскости ППУ, а приемные электроды расположены на ППУ так, что образуемые ими два приемных диполя повернуты в разные стороны относительно поперечной вертикальной осевой плоскости ППУ, причем приемные электроды каждого приемного диполя установлены на ППУ в местах, где разница потенциалов на приемном диполе, наводимая соответствующим излучающим диполем, близка к нулевому значению, при этом указанные элементы и связи между ними образуют первый комплект устройства, а возбуждающие электроды и соответствующие им приемные электроды образуют поисковую систему первого комплекта устройства, дополнительно введены второй комплект устройства, идентичный первому, кроме этого первый и второй комплекты устройства содержат связанные между собой приемо-передатчики, через которые осуществляется синхронизация работы комплектов устройства, при этом продольные оси поисковых систем первого и второго комплектов устройства развернуты в горизонтальной плоскости относительно продольной оси устройства в противоположные стороны на одинаковый угол, соответствующий максимальным значениям сигналов на приемных диполях при движении ППУ вдоль подводного объекта.
Выполнение функциональной задачи – « ... повышение точности отслеживания и уменьшение амплитуды колебаний траектории подводной поисковой установки при ее движении вдоль протяженного подводного металлосодержащего объекта за счет повышения достоверности обнаружения и точности обработки сигналов с приемных электродов» обеспечивается следующими отличительными признаками предлагаемого решения.
Первый признак – « ... в устройство дополнительно введен второй комплект устройства, идентичный первому, ... продольные оси первой и второй поисковых систем развернуты в горизонтальной плоскости относительно продольной оси устройства в противоположные стороны на одинаковый угол, соответствующий максимальным значениям сигналов на приемных диполях при движении ППУ вдоль подводного объекта» – обеспечивает повышение достоверности обнаружения подводного объекта и увеличение точности определения значений малых углов между продольной осью ППУ и протяженным подводным объектом при движении ППУ вдоль этого объекта за счет получения максимально возможных в данных условиях значений сигналов на приемных диполях поисковых систем первого и второго комплектов.
Второй признак – « ... первый и второй комплекты устройства содержат связанные между собой приемо-передатчики, через которые осуществляется синхронизация работы первого и второго комплектов устройства» – обеспечивает поочередное функционирование комплектов устройства с последующей передачей информации с использованием порта последовательной связи каждого комплекта через канал обмена в систему управления движением ППУ, что позволяет определить результирующий угол между продольной осью устройства и подводным объектом с повышенной точностью, за счет чего обеспечить траекторию движения ППУ с минимальными отклонениями от направления прокладки подводного протяженного объекта.
На основании изложенного можно заключить, что совокупность существенных признаков заявленного изобретения имеет причинно-следственную связь с достигнутым техническим результатом, т.е. благодаря данной совокупности существенных признаков изобретения стало возможным решение поставленной задачи. Следовательно, заявленное изобретение является новым, обладает изобретательским уровнем и пригодно для использования.
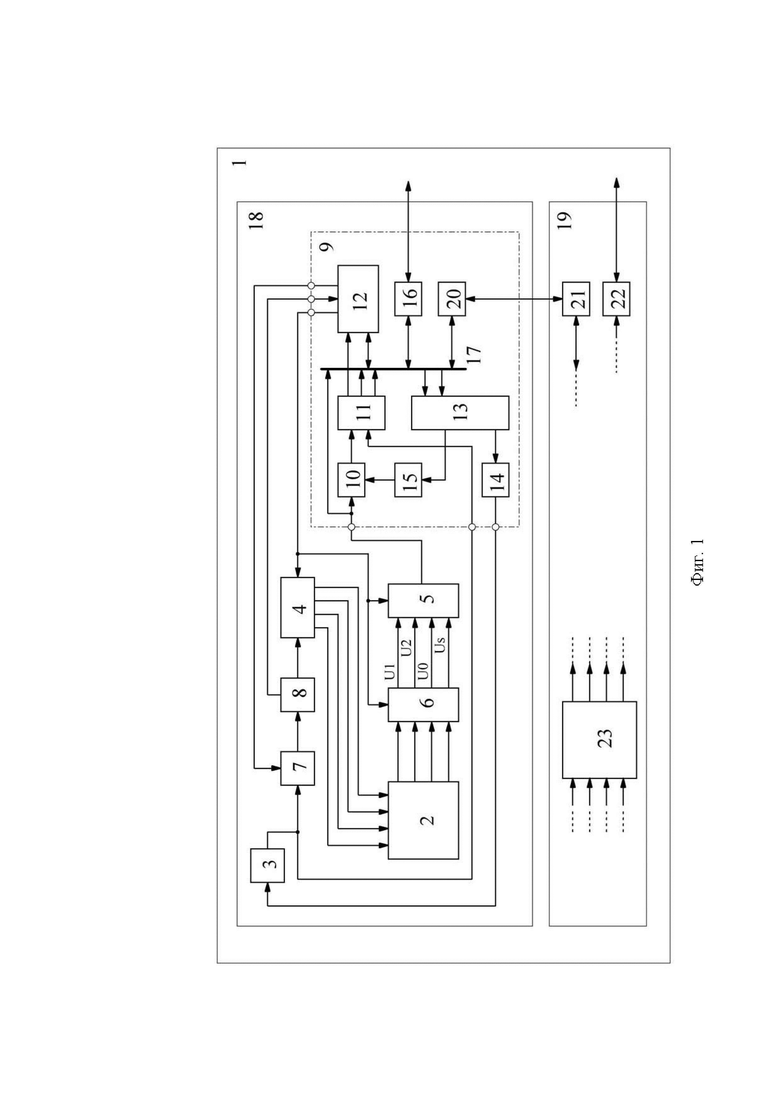
Сущность изобретения поясняется чертежами, где на фиг. 1 приведена функциональная схема устройства для обнаружения и отслеживания металлосодержащего протяженного подводного объекта; на фиг. 2 показано размещение электродов поисковых систем первого и второго комплектов устройства на подводной поисковой установке, на фиг. 3, 4 – приведены результаты экспериментальных исследований макета ППУ.
Устройство для обнаружения и отслеживания металлосодержащего протяженного подводного объекта с борта подводной поисковой установки 1, содержащее два излучателя электромагнитного поля, каждый из которых выполнен в виде двух возбуждающих электродов, установленных в кормовой и носовой частях ППУ соответственно, и два приемника электромагнитного поля в виде четырех приемных электродов, образующих поисковую систему 2, генератор 3 переменного напряжения, первый 4 и второй 5 коммутаторы, блок 6 нормализатора сигналов с управляемым коэффициентом усиления, управляемый аттенюатор 7, измерительный преобразователь 8 тока, а также блок 9 управления и преобразования сигналов (БУПС), при этом возбуждающие электроды поисковой системы 2 через первый коммутатор 4, измерительный преобразователь 8 тока и аттенюатор 7 подключены к выходу генератора 3 переменного напряжения, выход генератора 3 переменного напряжения соединен также со вторым входом БУПС 9, при этом первый выход БУПС 9 подключен на управляющие входы первого 4 и второго 5 коммутаторов, а также к управляющему входу блока 6 нормализатора сигналов, второй выход БУПС 9 соединен с задающим входом генератора 3 переменного напряжения. При этом БУПС 9 состоит из блока 10 компенсации, двухканального аналого-цифрового преобразователя 11 (АЦП), вычислительно-управляющего блока 12 (ВУБ), двухканального цифро-аналогового преобразователя 13 (ЦАП), первого 14 и второго 15 фильтров низких частот (ФНЧ1) и (ФНЧ2) соответственно, порта 16 последовательной связи и информационного канала 17. Выход первого канала ЦАП 13 через ФНЧ2 15 подключен ко второму входу блока 10 компенсации, выход второго канала ЦАП 13 соединен с входом ФНЧ1 14, выход которого является вторым выходом БУПС 9, управляющий выход ВУБ 12 является первым выходом БУПС 9, первый вход блока 10 компенсации является первым входом БУПС 9, а вход второго канала АЦП 11 является вторым входом БУПС 9. Вход первого канала АЦП 11 соединен с выходом блока 10 компенсации, при этом через информационный канал 17 организована связь ВУБ 12 с выходами АЦП 11, с портом 16 последовательной связи, а также с входами ЦАП 13, причем первый и второй каналы АЦП 11 идентичны и имеют общие цепи синхронизации и управления, первый и второй каналы ЦАП 13 также идентичны и имеют общие цепи синхронизации и управления, а тактовый выход АЦП 11 соединен с входом прерывания ВУБ 12, в котором второй управляющий выход и второй вход являются третьим выходом и третьим входом БУПС 9 соответственно. Управляющий вход управляемого аттенюатора 7 соединен с третьим выходом БУПС 9, выход измерительного преобразователя 8 тока соединен с третьим входом БУПС 9, приемные электроды поисковой системы 2 соединены с входами блока 6 нормализатора сигналов, а его выходы последовательно через второй коммутатор 5, первый вход БУПС 9 и информационный канал 17 связаны с ВУБ 12. Кроме этого порт 16 последовательной связи через канал обмена связан с системой управления движением ППУ, причем возбуждающие электроды поисковой системы расположены в горизонтальной плоскости ППУ таким образом, что образуемые ими два излучающих электрических диполя повернуты в разные стороны относительно продольной вертикальной осевой плоскости ППУ, а приемные электроды поисковой системы расположены на ППУ так, что образуемые ими два приемных диполя повернуты в разные стороны относительно поперечной вертикальной осевой плоскости ППУ, при этом указанные элементы и связи между ними образуют первый комплект 18 устройства. Устройство содержит также второй комплект 19, идентичный первому комплекту 18, при этом первый 18 и второй 19 комплекты содержат связанные между собой приемо-передатчики 20 и 21 соответственно, через которые осуществляется синхронизация работы комплектов устройства, связь второго комплекта с системой управления движением ППУ осуществляется через канал обмена с помощью порта 22 последовательной связи, который входит в состав второго комплекта.
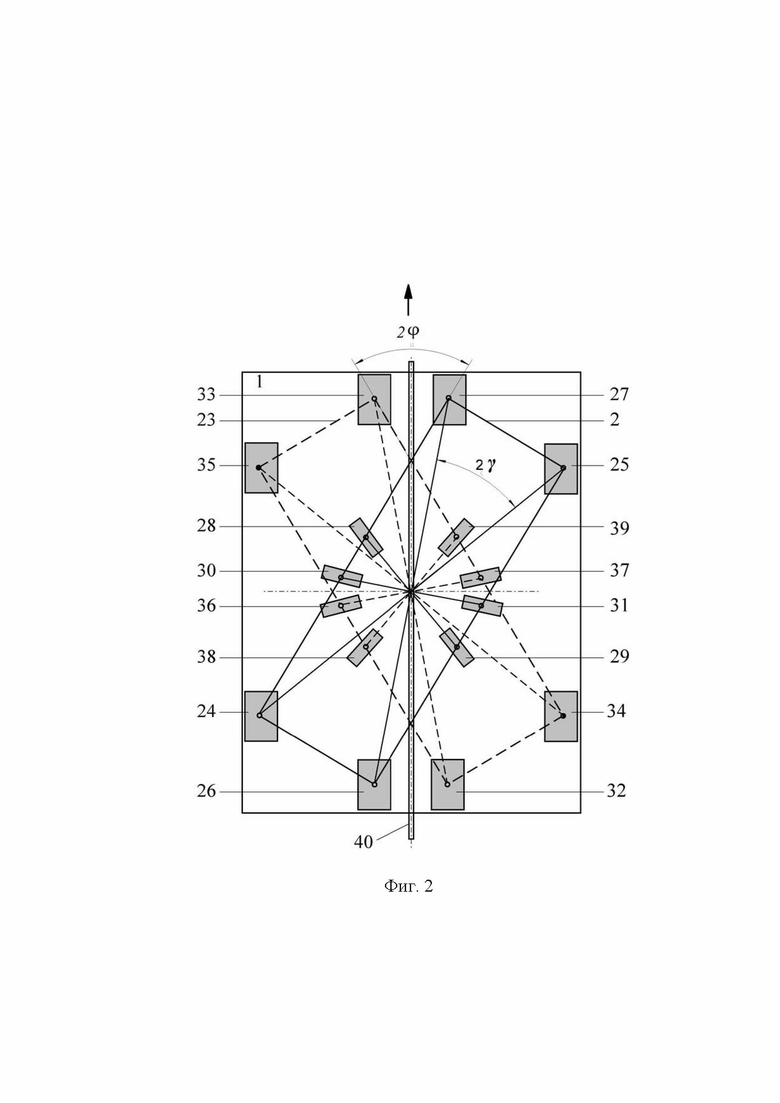
Поисковая система 2 первого комплекта 18 (см. фиг. 2) содержит излучающие электроды 24, 25, 26, 27, и приемные электроды 28, 29, 30, 31. Поисковая система 23 второго комплекта 19 идентична поисковой системе 2, содержит излучающие электроды 32, 33, 34, 35 и приемные электроды 36, 37, 38, 39. При этом продольные оси поисковых систем 2 и 23 развернуты в горизонтальной плоскости относительно продольной оси подводной поисковой установки 1 в противоположные стороны на одинаковый угол, соответствующий максимальным значениям сигналов на приемных диполях при движении ППУ вдоль подводного объекта 40.
Устройство для обнаружения и отслеживания металлосодержащего протяженного подводного объекта работает следующим образом.
Генератор 3 (см. фиг. 1) вырабатывает сигнал переменного напряжения синусоидальной формы USIN, который через управляемый аттенюатор 7, измерительный преобразователь 8 тока и первый коммутатор 4 поочередно подается на электроды поисковой системы 2: на первом такте измерения активируются возбуждающие электроды 24, 25 (см. фиг. 2), на втором такте – электроды 26, 27 и, наконец, на третьем и четвертом тактах – обе эти пары при параллельном включении кормовых электродов 24, 26, а также носовых электродов 25, 27. Поисковая система 2 первого комплекта 18 развернута на угол φ вправо от продольной оси подводного поискового устройства.
При этом в первом случае возбуждается электрический диполь, образованный электродами 24, 25, ось которого отклонена от продольной осевой плоскости поисковой системы 2 вправо на угол γ. Прием ведется на электроды 28, 29, где появляется переменное напряжение U28-29 , которое поступает на блок 6, выполняющий усиление и нормализация этого сигнала по уровню за счет регулирования коэффициента усиления с сохранением линейного режима работы. В результате на первом выходе блока 6 нормализатора вырабатывается сигнал U1, который через второй коммутатор 5 поступает на первый вход БУПС 9.
Одновременно с выхода генератора 3 на второй вход БУПС 9 подается напряжение USIN. В БУПС 9 выполняется синхронное детектирование, фильтрация и преобразование в цифровой эквивалент сигнала U1 с получением его квадратурной U1SIN и синфазной U1COS составляющих.
Во втором случае аналогично возбуждается электрический диполь, образованный электродами 26, 27, ось которого отклонена влево от продольной вертикальной осевой плоскости поисковой системы 2 на угол γ. Прием ведется на электроды 30, 31, где появляется переменное напряжение U30-31 , которое поступает на блок 6, выполняющий усиление и нормализация этого сигнала по уровню за счет регулирования коэффициента усиления с сохранением линейного режима работы. В результате на втором выходе блока 6 нормализатора вырабатывается сигнал U2, который через второй коммутатор 5 поступает на первый вход БУПС 9. Сигнал U2 в БУПС 16 преобразуется в квадратурную и синфазную компоненты U2SIN и U2COS .
В третьем случае возбуждаются оба электрических диполя 24, 25 и 26-27, при этом электроды 24 и 26 включаются параллельно, также как и электроды 23, 27. В этом случае образуется суммарный электрический диполь, ось которого лежит в вертикальной продольной осевой плоскости поисковой системы. При этом на третьем и четвертом выходах блока 6 вырабатываются соответственно сигналы U0 и US., которые определяются через сумму и через разность сигналов U1 и U2 соответственно. Эти сигналы поочередно через коммутатор 5 передаются в БУПС 9, где затем преобразуются соответственно в компоненты выходных сигналов устройства U0SIN, U0COS, USSIN, USCOS. Управление коммутаторами 4 и 5 осуществляется сигналом с первого выхода БУПС 9, а полученные в блоке 9 синфазные и квадратурные компоненты сигналов через порт 16 поступают в систему управления движением подводной поисковой установки.
После завершения указанных четырех тактов измерения через канал синхронизации, образованный блоками 20 и 21 в первом комплекте 18 и во втором комплекте 19 устройства соответственно, а также связью между ними, процесс измерения сигналов передается ко второму комплекту 19, который выполняется идентично рассмотренному для первого комплекта 18.
Поисковая система 23 второго комплекта 19 устройства (фиг. 2) содержит два возбуждающих диполя, образованные электродами 32, 33 и 34, 35 и два приемных диполя, образованные электродами 36, 37 и 38, 39. Цикл из четырех тактов измерения повторяется, однако, в этом случае продольная ось поисковой системы 23 второго комплекта 19 развернута влево от продольной оси подводной поисковой установки на угол φ. Вычисленные синфазные и квадратурные компоненты сигналов через порт 22 поступают в систему управления движением подводной поисковой установки.
Предложенное техническое решения позволяет определять с повышенной точностью значение угла пересечения курса подводной поисковой системы и направления прокладки подводного объекта, а также параллельного смещения установки в сторону от подводного объекта. Полезным результатом является возможность управления движением подводной поисковой установки с минимальными отклонениями от направления прокладки подводного металлосодержащего объекта.
Для подтверждения эффективности предложенного решения были проведены экспериментальные исследования макета подводной поисковой установки в опытовом бассейне Центра подводной робототехники Института проблем морских технологий ИПМТ ДВО РАН. В качестве подводного протяженного объекта использовался морской гидрографический кабель-трос КГ-7 диаметром 14 мм. Высота расположения излучающих и приемных диполей поисковой установки от дна бассейна составляла (1,2 … 1,3) м. Каждый комплект поисковой установки был связан через порт последовательной связи с компьютером, который являлся аналогом системы управления движением ППУ.
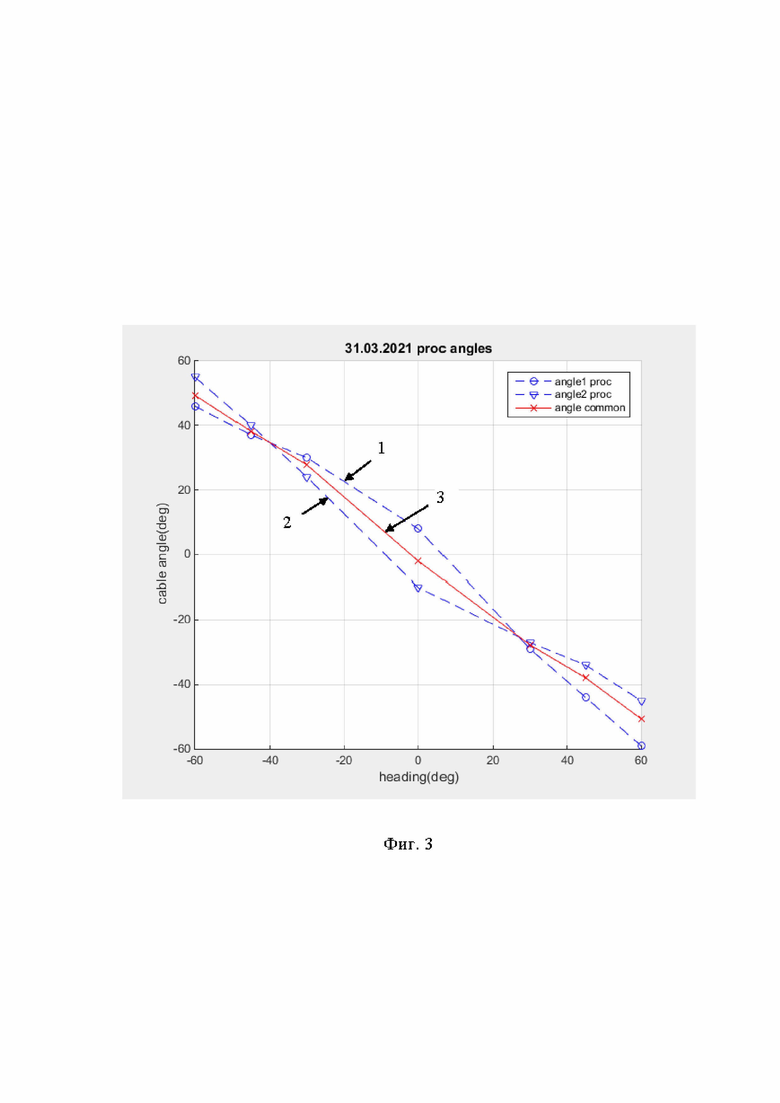
На фиг. 3 показаны рассчитанные в аналоге системы управления движением ППУ углы пересечения с направлением прокладки кабель-троса продольной оси поисковой системы первого комплекта (график 1), поисковой системы второго комплекта (график 2) и результирующий угол пересечения курса подводной поисковой установки с направлением прокладки кабеля (график 3). По горизонтальной оси системы координат отложены значения установленных в эксперименте углов, а по вертикальной оси – рассчитанных углов.
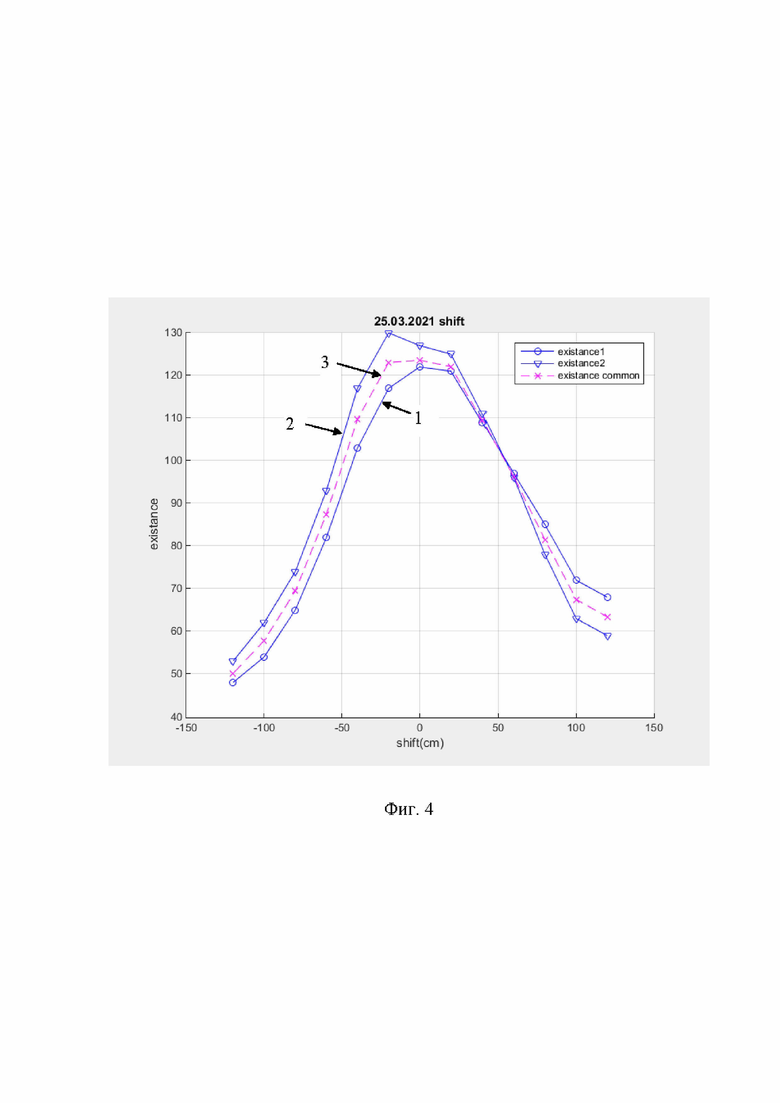
На фиг. 4 приведены значения рассчитанного в аналоге системы управления движением ППУ сигнала вероятности «существования» кабель-троса в зависимости от его параллельного смещения от продольной оси ППУ, которые показаны по оси ординат. По оси абсцисс показано установленное в эксперименте параллельное смещение. При этом график 1 соответствует результатам расчета для первого комплекта, график 2 – для второго комплекта, а график 3 – результирующий, для ППУ в целом.
Приведенные результаты экспериментов убедительно подтверждают высокое качество функционирования предлагаемого технического решения, выраженное в повышенной точности работы в диапазоне малых углов отклонения курса ППУ от заданного курса в виде направления прокладки подводного протяженного объекта.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для обнаружения и отслеживания металлосодержащего протяженного подводного объекта с борта автономного необитаемого подводного аппарата | 2018 |
|
RU2672775C1 |
| Устройство для обнаружения и отслеживания металлосодержащего протяженного подводного объекта с борта автономного необитаемого подводного аппарата | 2021 |
|
RU2757328C1 |
| УСТРОЙСТВО ДЛЯ ОБНАРУЖЕНИЯ И ОТСЛЕЖИВАНИЯ МЕТАЛЛОСОДЕРЖАЩЕГО ПРОТЯЖЕННОГО ПОДВОДНОГО ОБЪЕКТА С БОРТА ПОДВОДНОЙ ПОИСКОВОЙ УСТАНОВКИ (ВАРИАНТЫ) | 2000 |
|
RU2174244C1 |
| УСТРОЙСТВО ДЛЯ ОБНАРУЖЕНИЯ И ОТСЛЕЖИВАНИЯ МЕТАЛЛОСОДЕРЖАЩЕГО ПРОТЯЖЕННОГО ПОДВОДНОГО ОБЪЕКТА С БОРТА ПОДВОДНОЙ ПОИСКОВОЙ УСТАНОВКИ | 2005 |
|
RU2280268C1 |
| ПОДВОДНАЯ ТЕЛЕВИЗИОННАЯ СИСТЕМА УПРАВЛЕНИЯ | 2007 |
|
RU2374781C2 |
| СПОСОБ ОБНАРУЖЕНИЯ И ОТСЛЕЖИВАНИЯ ЭЛЕКТРОПРОВОДНОГО ПРОТЯЖЕННОГО ПОДВОДНОГО ОБЪЕКТА С БОРТА ПОДВОДНОЙ ПОИСКОВОЙ УСТАНОВКИ | 1998 |
|
RU2136020C1 |
| Способ управления подводным робототехническим комплексом по каналу связи | 2017 |
|
RU2656825C1 |
| ПОДВОДНЫЙ ЗОНД | 2010 |
|
RU2436119C1 |
| СПОСОБ ПРЯМОГО ПОИСКА ГЕОЛОГИЧЕСКИХ ОБЪЕКТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1996 |
|
RU2111514C1 |
| Модуль комплексного антенного устройства радиоэлектронных средств автономного необитаемого подводного аппарата | 2019 |
|
RU2712797C1 |
Изобретение относится к области электромагнитных исследований. Сущность: устройство для обнаружения и отслеживания металлосодержащего протяженного подводного объекта с борта подводной поисковой установки (ППУ) содержит два комплекта элементов и узлов, каждый из них имеет поисковые системы, содержащие в своем составе два излучающих диполя, выполненные в виде четырех возбуждающих электродов, установленных в носовой и кормовой частях ППУ, два приемных диполя, выполненные в виде четырех приемных электродов, генератор переменного напряжения, два коммутатора, управляемый аттенюатор, измерительный преобразователь тока, а также блок управления и преобразования сигналов, который через порт последовательной связи посредством канала обмена связан с системой управления движением ППУ, при этом синхронизация работы комплектов устройства обеспечивается связанными между собой приемопередатчиками каждого комплекта. Продольные оси поисковых систем первого и второго комплекта устройства развернуты в горизонтальной плоскости относительно продольной оси устройства в противоположные стороны на одинаковый угол, соответствующий максимальным значениям сигналов на приемных диполях при движении ППУ вдоль подводного объекта. Технический результат: повышение точности отслеживания и уменьшение амплитуды колебаний траектории подводной поисковой установки при ее движении вдоль протяженного подводного металлосодержащего объекта за счет повышения достоверности его обнаружения и точности обработки сигналов с приемных электродов. 4 ил.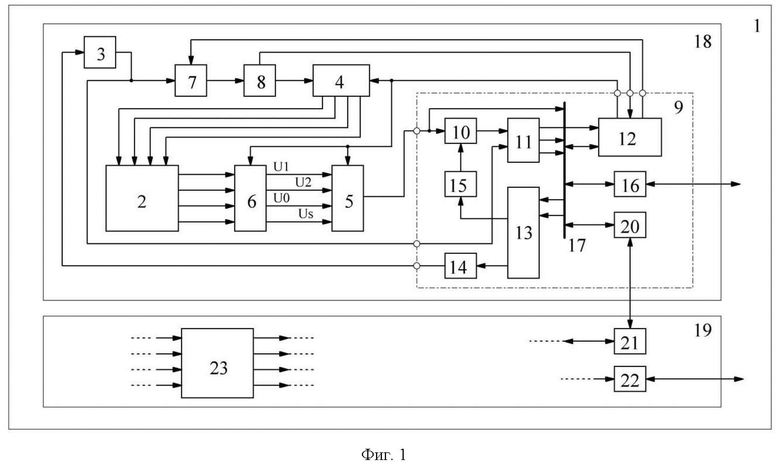
Устройство для обнаружения и отслеживания металлосодержащего протяженного подводного объекта (ПО) с борта подводной поисковой установки (ППУ), содержащее два излучающих диполя электромагнитного поля, каждый из которых выполнен в виде двух возбуждающих электродов, установленных в кормовой и носовой частях ППУ соответственно, два приемных диполя электромагнитного поля в виде четырех приемных электродов, генератор переменного напряжения, первый и второй коммутаторы, блок нормализатора сигналов с управляемым коэффициентом усиления, управляемый аттенюатор, измерительный преобразователь тока, а также блок управления и преобразования сигналов (БУПС), при этом возбуждающие электроды через первый коммутатор, измерительный преобразователь тока и аттенюатор подключены к выходу генератора переменного напряжения, выход генератора переменного напряжения соединен также со вторым входом БУПС, при этом первый выход БУПС подключен на управляющие входы первого и второго коммутаторов, а также к управляющему входу блока нормализатора сигналов, второй выход БУПС соединен с задающим входом генератора переменного напряжения, при этом БУПС состоит из блока компенсации, двухканального аналого-цифрового преобразователя (АЦП), вычислительно-управляющего блока (ВУБ), двухканального цифроаналогового преобразователя (ЦАП), первого и второго фильтров низких частот (ФНЧ1) и (ФНЧ2) соответственно, порта последовательной связи и информационного канала, выход первого канала ЦАП через ФНЧ2 подключен к второму входу блока компенсации, выход второго канала ЦАП соединен с входом ФНЧ1, выход которого является вторым выходом БУПС, управляющий выход ВУБ является первым выходом БУПС, первый вход блока компенсации является первым входом БУПС, а вход второго канала АЦП является вторым входом БУПС, вход первого канала АЦП соединен с выходом блока компенсации, при этом через информационный канал организована связь ВУБ с выходами АЦП, с портом последовательной связи, а также с входами ЦАП, причем первый и второй каналы АЦП идентичны и имеют общие цепи синхронизации и управления, первый и второй каналы ЦАП также идентичны и имеют общие цепи синхронизации и управления, а тактовый выход АЦП соединен с входом прерывания ВУБ, в котором второй управляющий выход и второй вход являются третьим выходом БУПС и третьим входом БУПС соответственно, управляющий вход управляемого аттенюатора соединен с третьим выходом БУПС, выход измерительного преобразователя тока соединен с третьим входом БУПС, приемные электроды соединены с входами блока нормализатора сигналов, а его выходы последовательно через второй коммутатор, первый вход БУПС и информационный канал связаны с ВУБ, кроме этого порт последовательной связи через канал обмена связан с системой управления движением ППУ, причем возбуждающие электроды расположены в горизонтальной плоскости ППУ таким образом, что образуемые ими два излучающих электрических диполя повернуты в разные стороны относительно продольной вертикальной осевой плоскости ППУ, а приемные электроды расположены на ППУ так, что образуемые ими два приемных диполя повернуты в разные стороны относительно поперечной вертикальной осевой плоскости ППУ, причем приемные электроды каждого приемного диполя установлены на ППУ в местах, где разница потенциалов на приемном диполе, наводимая соответствующим излучающим диполем, близка к нулевому значению, при этом указанные элементы и связи между ними образуют первый комплект устройства, а возбуждающие электроды и соответствующие им приемные электроды образуют поисковую систему первого комплекта устройства, отличающееся тем, что в устройство дополнительно введены второй комплект устройства, идентичный первому, кроме этого первый и второй комплекты устройства содержат связанные между собой приемопередатчики, через которые осуществляется синхронизация работы комплектов устройства, при этом продольные оси поисковых систем первого и второго комплектов устройства развернуты в горизонтальной плоскости относительно продольной оси устройства в противоположные стороны на одинаковый угол, соответствующий максимальным значениям сигналов на приемных диполях при движении ППУ вдоль подводного объекта.
| Устройство для обнаружения и отслеживания металлосодержащего протяженного подводного объекта с борта автономного необитаемого подводного аппарата | 2018 |
|
RU2672775C1 |
| УСТРОЙСТВО ДЛЯ ОБНАРУЖЕНИЯ И ОТСЛЕЖИВАНИЯ МЕТАЛЛОСОДЕРЖАЩЕГО ПРОТЯЖЕННОГО ПОДВОДНОГО ОБЪЕКТА С БОРТА ПОДВОДНОЙ ПОИСКОВОЙ УСТАНОВКИ (ВАРИАНТЫ) | 2000 |
|
RU2174244C1 |
| УСТРОЙСТВО ДЛЯ ОБНАРУЖЕНИЯ И ОТСЛЕЖИВАНИЯ МЕТАЛЛОСОДЕРЖАЩЕГО ПРОТЯЖЕННОГО ПОДВОДНОГО ОБЪЕКТА С БОРТА ПОДВОДНОЙ ПОИСКОВОЙ УСТАНОВКИ | 2005 |
|
RU2280268C1 |
| US 3875497, 01.04.1975 | |||
| US 2010185348 A1, 22.07.2010. | |||

