Предлагаемые способ и устройство относятся к области систем управления положения и курсом летательных аппаратов, преимущественно, к устройствам автоматизированного наведения самолетов и могут быть использованы в бортовой аппаратуре самолетов ВВС, ВМФ, ПВО.
Известны способы формирования траектории бортового наведения, изложенные в [1].
В качестве аналога может служить способ прямого наведения с постоянным углом упреждения, в котором выполняется условие равенства заданному углу упреждения текущего значения угла между продольной осью самолета и линией самолет-цель.
Наиболее близким по технической сущности является способ параллельного сближения, изложенный в [2].
Способ параллельного сближения требует перемещения линии самолет-цель в процессе полета самолета к цели параллельно начальному положению. В процессе движения самолета к цели его вектор скорости упреждает линию самолет-цель на угол упреждения, зависящий от скоростей самолета и цели, от угла между вектором скорости цели и линией самолет-цель.
Описания устройства для реализации как аналога, так и прототипа, помещенного в открытой литературе, авторам неизвестно.
Предлагаемый способ бортового наведения в отличие от способа параллельного сближения, требует в процессе сближения самолета и цели перемещения линии самолет - фиктивная цель параллельно начальному положению линии самолет-фиктивная цель, при этом фиктивная цель имеет курс и скорость, равные курсу и скорости цели, и фиктивная цель смещена по курсу движения цели на величину, зависящую от текущих значений дальности, ракурса и от заданных значений дальности, ракурса, причем под ракурсом понимается угол между вектором скорости цели и линией самолет-цель.
Траектория бортового наведения строится путем управления курсом полета самолета в зависимости от угла упреждения относительно фиктивной цели.
На фиг. 1, 2, 3, 4, 5 приводятся: фиг. 1 - общая блок-схема устройства; фиг. 2 - блок смещения фиктивной цели; фиг. 3 - блок дальности; фиг. 4 - блок скорости сближения; фиг. 5 - блок угла упреждения.
Предлагаемое устройство, реализующее метод бортового наведения (фиг. 1), содержит коммутатор 1, выход которого соединен с входом блока памяти 2. Первый и второй выходы блока памяти 2 подключены к выходам блока вычитания 3, третий и четвертый выходы блока памяти 2 соединены с входами блока вычитания 4. Выход блоков вычитания 3, 4, пятый, девятый, десятый, одиннадцатый, двенадцатый, тринадцатый выходы блока памяти 2 соединены с входами блока смещения фиктивной цели 5. Выходы блока смещения фиктивной цели 5 соединены с входами блока дальности 6. Выходы блока дальности 6, блока смещения фиктивной цели 5, пятый, шестой, седьмой и восьмой выходы блока памяти подключены к входам блока скорости сближения 7. Выход блока дальности 6 и выход блока скорости сближения 7 подключены к входам делителя 8. Выход делителя 8 соединен с входом инвертора 9. Выход инвертора 9, выходы блока смещения фиктивной цели 5, восьмой и девятый выходы блока памяти 3 подключены к входам блока угла упреждения 10. Выход блока упреждения 10 запоминается в выходном буфере 11.
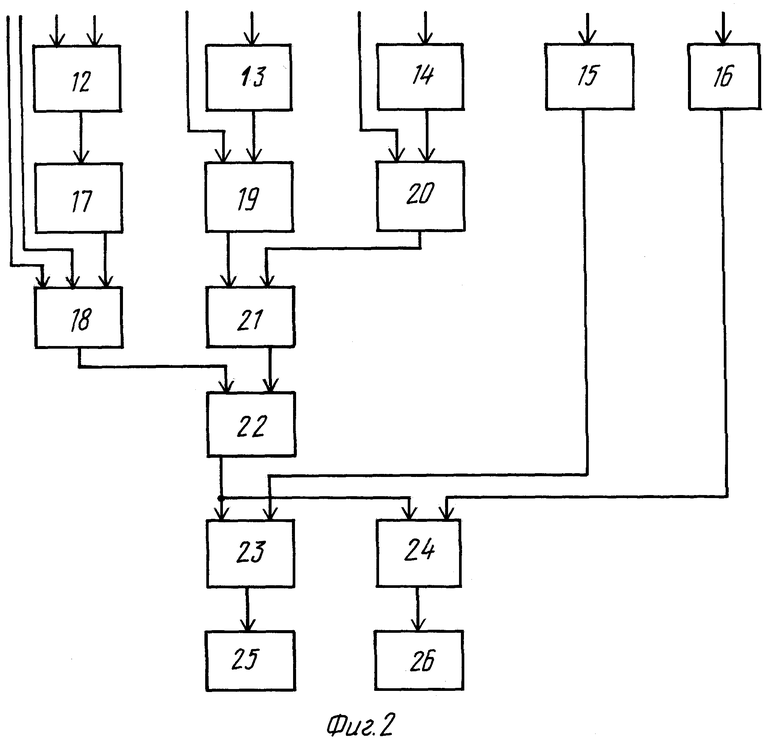
Блок смещения фиктивной цели 5 может быть выполнен, например, по схеме, приведенной на фиг. 2, содержащей блок вычитания 12, входы которого соединены с шестым и восьмым выходами блока памяти 2, блок вычисления синуса 13, вход которого соединен с шестым выходом блока памяти 2, блок вычисления синуса 14, к входу которого подключен восьмой выход блока памяти 2, блок вычисления косинуса 15, на вход которого подключен девятый выход блока памяти 2, блок вычисления синуса 16, вход которого соединен с девятым выходом блока памяти 2. Выход блока 12 подключен к входу блока вычисления синуса 17. Выход блока 17, пятый, седьмой выходы блока памяти 2 соединены с входами блока умножения 18. Пятый выход блока памяти 2 и выход блока 13 подключены к входам блока умножения 19. Седьмой выход блока памяти 2 и выход блока 14 соединены с входами блока умножения 20. Выходы блоков 19 и 20 подключены к выходам блока вычитания 21. Выходы блоков 18 и 21 поступают соответственно на первый и второй входы блока деления 22. Выход блока 22 и выход блока 15 соединены с входами блока умножения 23, выход блока 22 и выход блока 16 подключены к входам блока умножения 24. Выход блока 3 и выход блока 23 соединены с входами блока вычитания 25, выход блока 4 и выход блока 24 подключены к входам блока вычитания 26.
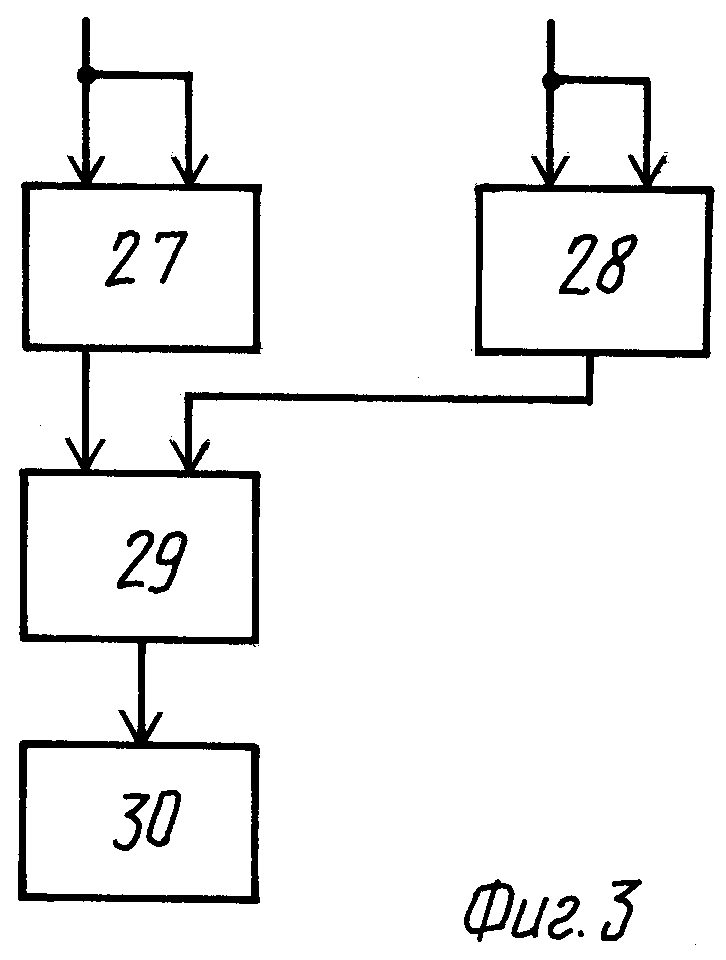
Блок дальности 6 может быть выполнен, например, по схеме, приведенной на фиг. 3, содержащей в себе блоки умножения 27, 28, на первый и второй входы которых подключены выходы блоков 25 и 26. Выходы блоков 27, 28 соединены с входами сумматора 29. Выход сумматора 29 соединен с входом блока вычисления квадратного корня 30.
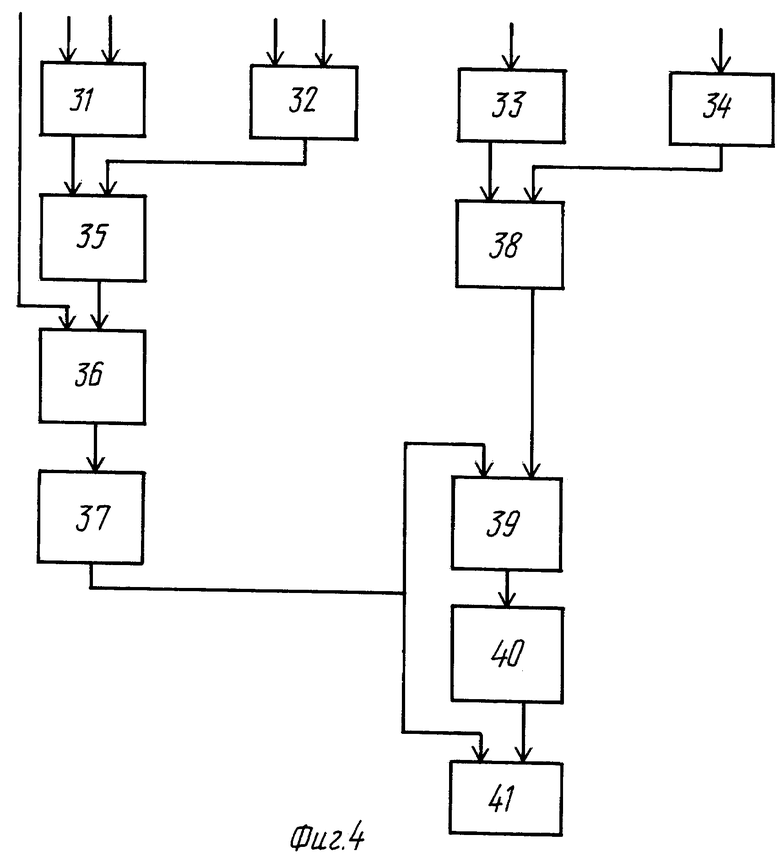
Блок скорости сближения 7 может быть выполнен по схеме, приведенной на фиг. 4, и состоит из блока умножения 31, на входы которого подключены первый выход блока 5 и одиннадцатый выход блока 2; блока умножения 32, входы которого соединены с вторым выходом блока 5 и двенадцатым выходом блока 2; блока умножения 33, на входы которого подключены тринадцатый выход блока 2; блока умножения 34, входы которого соединены с десятым выходом блока 2. Выходы блоков 31 и 32 соединены с входами сумматора 35. Выход сумматора 35 и выход блока дальности 6 подключены соответственно к первому и второму входу блока делителя 36. Выход блока делителя 36 подсоединен к входам блока умножения 37. Выходы блоков 33 и 34 подключены соответственно к первому и второму входам блока вычитания 38. Выходы блоков 37 и 38 соединены с входами сумматора 39. Выход сумматора 39 подключен к входу блока извлечения квадратного корня 40. Выход блока 36 и выход блока 40 подсоединены соответственно к первому и второму входам блока вычитания 41.
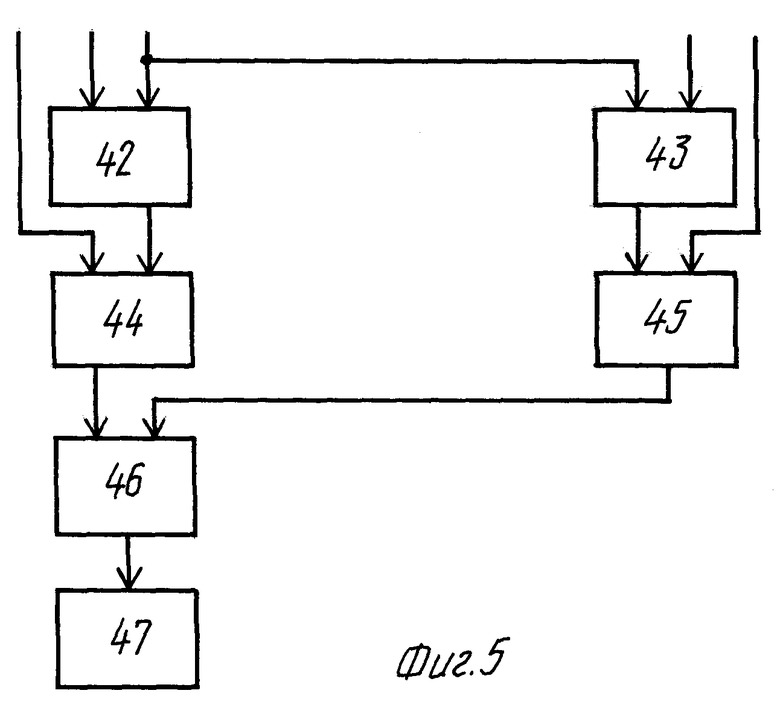
Блок угла упреждения 10 может быть выполнен по схеме, приведенной на фиг. 5, и содержит блок умножения 42, на входы которого подключены одиннадцатый выход блока 2 и выход блока 9, выход умножения 43, к входам которого подсоединены двенадцатый выход блока 2 и выход блока 9. Выход блока 42 и первый выход блока 5 подключены к входам сумматора 44. Выход блока 43 и второй выход блока 5 соединены с входами сумматора 45. Выходы блоков 45 и 44 подсоединены соответственно к первому и второму входам делителя 46. Выход делителя 46 подключен к входу блока определения арктангенса 47.
Блоки определения синуса (13, 14, 16), косинуса (15), арктангенса (47) могут быть выполнены, например, в виде запоминающих устройств, в которых осуществляется выборка табулированных значений функций по заданному аргументу.
Предлагаемое устройство работает следующим образом.
В блок памяти 2 от внешнего источника информации поступают сигналы, пропорциональные координатам, составляющим скорости, курсу и горизонтальной скорости цели, значения которых запоминаются на момент поступления. В блоке памяти 2 также хранятся значения сигналов, пропорциональных координатам и горизонтальной скорости самолета, горизонтальной дальности самолет-цель и ракурса цели, величинам заданной дальности и заданного ракурса. Коммутатор 1 подключает соответствующие секции блока памяти 2, из которого на входы блоков вычитания 3, 4 поступают сигналы, пропорциональные координатам цели и самолета, на входы блока 5 - сигналы, пропорциональные текущим значениям дальности, ракурса и курса цели, заданным значениям дальности и ракурса, на входы блока 7 поступают сигналы, пропорциональные величинам составляющих скорости цели, скорости самолета, на вход блока 10 поступают сигналы, пропорциональные составляющим скорости цели. Результат работы устройства, блок-схема которого изображена на фиг. 1, в виде сигнала, пропорционально углу упреждения относительно фиктивной цели, запоминается в выходном буфере 11 в качестве заданного курса полета самолета.
Данные расчетов и результаты математического моделирования показывают, что вероятность перехвата неманеврирующей цели при наличии ошибок внешней информации изменяется от 0,96 до 0,8 при увеличении разрыва в поступлении внешней информации от 5 с до 60 с, вероятность перехвата маневрирующей цели при тех же условиях падает с 0,95 до 0,4.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ФОРМИРОВАНИЯ ТРАЕКТОРИИ ПОЛЕТА ИНФОРМАЦИОННОГО ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2597309C1 |
| СИСТЕМА КОРРЕКЦИИ ТРАЕКТОРИИ ДВИЖЕНИЯ МАНИПУЛЯТОРА | 2011 |
|
RU2462745C1 |
| СПОСОБ НАВЕДЕНИЯ РАКЕТЫ | 2009 |
|
RU2426969C2 |
| СПОСОБ СТРЕЛЬБЫ БОЕВОЙ МАШИНЫ ПО ВОЗДУШНОЙ ЦЕЛИ (ВАРИАНТЫ) И СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2002 |
|
RU2217684C2 |
| СПОСОБ ПРОПОРЦИОНАЛЬНОГО НАВЕДЕНИЯ ЛЕТАТЕЛЬНЫХ АППАРАТОВ НА НАЗЕМНЫЕ ОБЪЕКТЫ | 1999 |
|
RU2148235C1 |
| СПОСОБ СТРЕЛЬБЫ БОЕВОЙ МАШИНЫ ПО ЦЕЛИ И СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 1999 |
|
RU2172463C2 |
| СПОСОБ СТРЕЛЬБЫ БОЕВОЙ МАШИНЫ ПО ВЫСОКОСКОРОСТНОЙ ЦЕЛИ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1998 |
|
RU2138757C1 |
| Способ вывода вращающейся по углу крена ракеты с гироскопом направления в зону захвата цели головкой самонаведения и система для его осуществления | 2017 |
|
RU2659622C1 |
| СПОСОБ ПЕРЕХВАТА ВОЗДУШНЫХ ЦЕЛЕЙ ЛЕТАТЕЛЬНЫМИ АППАРАТАМИ | 2012 |
|
RU2498342C1 |
| СПОСОБ НАВЕДЕНИЯ ТЕЛЕУПРАВЛЯЕМОЙ РАКЕТЫ И СИСТЕМА НАВЕДЕНИЯ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 1996 |
|
RU2106597C1 |
Предлагаемые способ и устройство относятся к области систем управления положением и курсом летательных аппаратов. Предлагаемый способ бортового наведения требует в процессе сближения самолета и цели перемещения линии самолет-фиктивная цель параллельно начальному положению этой линии, в отличие от способа параллельного сближения, обеспечивающего параллельное перемещение линии самолет-цель. Устройство для реализации предлагаемого способа бортового наведения описано с помощью общей блок-схемы устройства, с использованием описаний автономных блоков смещения фиктивной цели, блока дальности, блока скорости сближения и блока угла упреждения. Технический результат - улучшение управления положением и курсом летательных аппаратов. 2 с.п. ф-лы, 5 ил.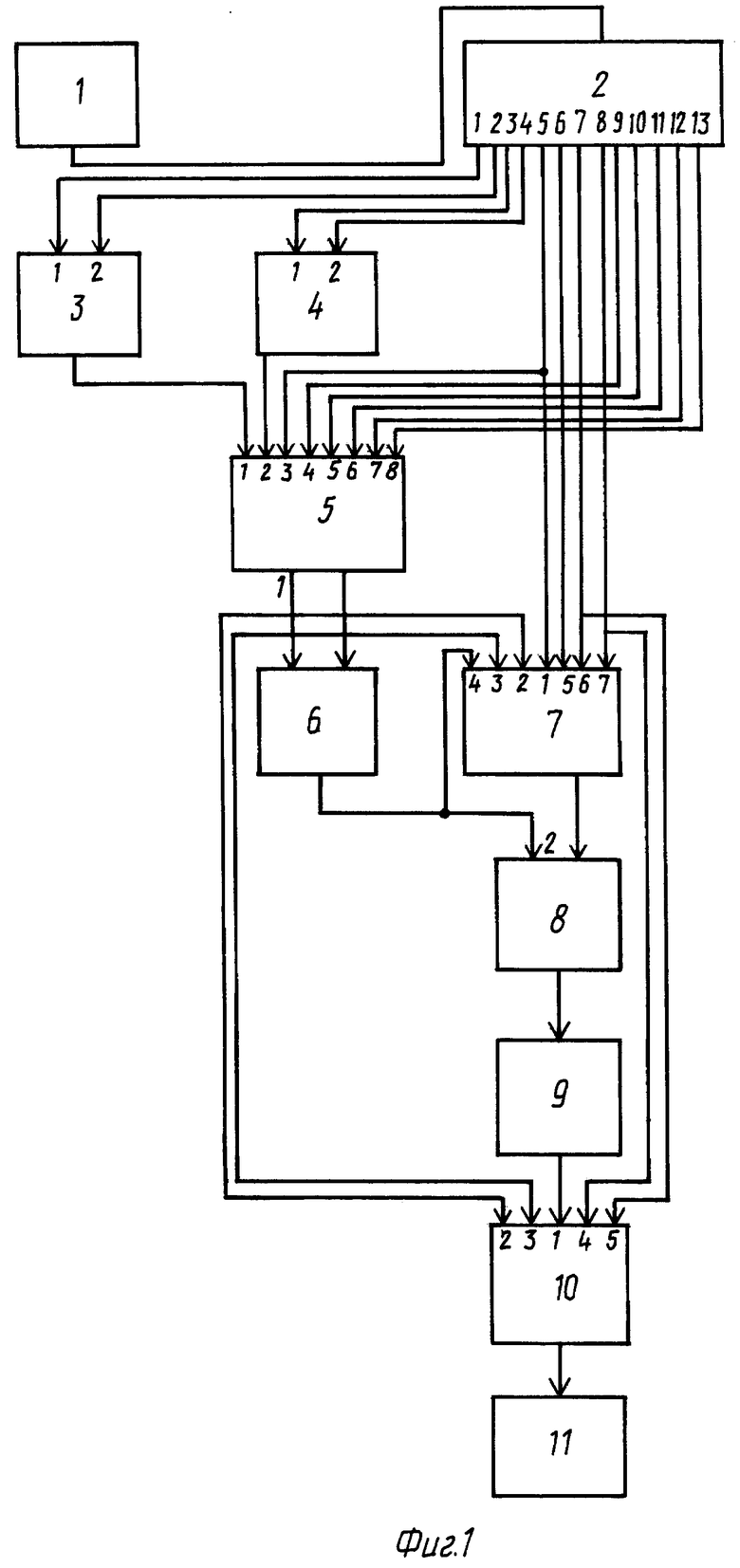
| Справочник офицера противовоздушной обороны | |||
| - М.: Военное издательство, 1987, с.158 | |||
| Справочник офицера противовоздушной обороны | |||
| - М.: Военное издательство, 1987, с.160. |

