Изобретение относится к ракетной технике и предназначено для использования в системах наведения телеуправляемых ракет.
Задача наведения ракеты на цель, заключающаяся в обеспечении сближении ракеты с целью и, в конечном счете, в совмещении их координат, решается с помощью различных методов наведения, определяющих требуемый закон движения ракеты или, по-другому, кинематическую (опорную) траекторию наведения ракеты. Метод наведения определяет характер траектории движения ракеты, потребные перегрузки ракеты, функциональную схему системы наведения и ее аппаратурный состав, а также точность наведения ракеты на цель.
Известен способ наведения ракеты, при котором в течение всего времени управляемого полета к цели ракету удерживают на линии визирования цели (ЛВЦ) ([1], Ф.К.Неупокоев. Стрельба зенитными ракетами. - М.: Военное издательство, 1991, стр.76-78). Кинематическая траектория наведения ракеты задается методом наведения, определяемым при этом способе наведения заданием в каждой плоскости наведения уравнения связи вида

где φц - угловая координата цели (угловое положение ЛВЦ);
φk - требуемая (кинематическая) угловая координата ракеты.
Такой метод наведения, называемый методом совмещения трех точек, обладает недостатками, ограничивающими его применение при стрельбе ракетой по подвижным целям. Это связано с тем, что задаваемая этим методом опорная траектория наведения ракеты имеет большую кривизну и для движения по ней ракета должна иметь относительно большие располагаемые нормальные перегрузки, существенно зависящие от скорости движения цели, высоты ее полета и ускорения, что предопределяет также значительные динамические ошибки в контуре управления ракетой.
Наиболее близким к предлагаемому является способ наведения ракеты, включающий измерение координат цели и ракеты и угловое смещение кинематической траектории наведения ракеты относительно ЛВЦ в плоскости наведения, которое формируют пропорционально параметру метода наведения и текущей разности дальностей до цели и ракеты ([1], стр.66-67, стр.85-90).
Кинематическая траектория наведения ракеты при этом способе определяется методом наведения, задаваемым в каждой плоскости наведения уравнением связи вида

где А - параметр метода наведения;
Δr=rц-rp - разность дальностей до цели rц и ракеты rp.
Такой метод наведения называется методом наведения с упреждением (или методом спрямления траектории), при котором угловое смещение кинематической траектории наведения ракеты относительно ЛВЦ формируют в виде текущего значения угла упреждения φупр, равного

где параметр метода наведения А определяют по соотношению

где m - коэффициент спрямления;
 - угловая скорость ЛВЦ (цели);
- угловая скорость ЛВЦ (цели);
 - скорость изменения разности дальностей до цели и ракеты.
- скорость изменения разности дальностей до цели и ракеты.
Параметр метода наведения вида (4) в известном способе получен исходя из обеспечения условия сведения к нулю угловой скорости кинематической траектории наведения в точке встречи ракеты с целью (при rP=rц), т.е. в момент встречи ракеты с целью выполняется условие

Тогда при выполнении условий, что скорость изменения углового положения цели  и скорость относительного сближения ракеты и цели
и скорость относительного сближения ракеты и цели  постоянны, обеспечивается прямолинейная кинематическая траектория наведения и, соответственно, потребные перегрузки ракеты и динамическая ошибка наведения на этой траектории будут близки к нулю, т.е. в этом случае будет обеспечиваться полет ракеты по практически полностью спрямленной траектории ([2], А.М.Батков, И.Б.Тарханов. Системы теленаведения. - М.: Машиностроение, 1971, стр.42-43). Однако в реальности такое предположение о характере движений цели, ракеты и скорости их сближения не выполняется даже при обстреле прямолинейно летящей цели, не говоря уже о маневрирующей цели, и поэтому при наведении ракеты с использованием известного метода также происходит искривление кинематической траектории наведения, возрастание потребных перегрузок от ракеты и увеличение динамической ошибки наведения и, как следствие, ограничение зоны поражения цели ракетой, что особенно характерно для перехвата скоростных и высоколетящих целей. Этим и определяются недостатки такого способа наведения, ограничивающие его применение.
постоянны, обеспечивается прямолинейная кинематическая траектория наведения и, соответственно, потребные перегрузки ракеты и динамическая ошибка наведения на этой траектории будут близки к нулю, т.е. в этом случае будет обеспечиваться полет ракеты по практически полностью спрямленной траектории ([2], А.М.Батков, И.Б.Тарханов. Системы теленаведения. - М.: Машиностроение, 1971, стр.42-43). Однако в реальности такое предположение о характере движений цели, ракеты и скорости их сближения не выполняется даже при обстреле прямолинейно летящей цели, не говоря уже о маневрирующей цели, и поэтому при наведении ракеты с использованием известного метода также происходит искривление кинематической траектории наведения, возрастание потребных перегрузок от ракеты и увеличение динамической ошибки наведения и, как следствие, ограничение зоны поражения цели ракетой, что особенно характерно для перехвата скоростных и высоколетящих целей. Этим и определяются недостатки такого способа наведения, ограничивающие его применение.
Задачей настоящего изобретения является снижение потребных нормальных перегрузок ракеты и динамической ошибки наведения на кинематической траектории наведения за счет ее спрямления независимо от характера движения цели и изменения скорости сближения ракеты с целью и расширение условий применения ракеты при перехвате скоростных и высоколетящих целей.
Решение поставленной задачи достигается тем, что в способе наведения ракеты на цель, включающем измерение координат цели и ракеты и угловое смещение кинематической траектории наведения ракеты относительно ЛВЦ в плоскости наведения, которое формируют пропорционально параметру метода наведения и текущей разности дальностей до цели и ракеты, новым является то, что параметр метода наведения определяют в текущем времени наведения ракеты с момента начала формирования смещения кинематической траектории из соотношения

где А,  - параметр метода наведения ракеты и его первая производная соответственно;
- параметр метода наведения ракеты и его первая производная соответственно;
U1, U2 - функции параметров относительного сближения ракеты с целью;
Wц - текущее значение потребного нормального ускорения ракеты,
определяемого движением ЛВЦ в плоскости наведения,
причем текущие значения функций параметров относительного сближения ракеты с целью U1, U2 определяют соответственно по соотношениям

 ,
,
где  ,
,  - соответственно первая и вторая производные разности дальностей до цели и ракеты;
- соответственно первая и вторая производные разности дальностей до цели и ракеты;
rp,  - соответственно дальность до ракеты и ее первая производная;
- соответственно дальность до ракеты и ее первая производная;
Vp,  - соответственно скорость ракеты и ее первая производная.
- соответственно скорость ракеты и ее первая производная.
Сущность предлагаемого изобретения заключается в том, что параметр метода наведения А, определяющий текущее значение угла упреждения ракеты относительно ЛВЦ, задают исходя из обеспечения выполнения условия: в точке встречи ракеты с целью (т.е. при rP=rц) полное потребное нормальное ускорение ракеты на кинематической траектории должно быть равно нулю. В таком случае обеспечивается прямолинейная траектория наведения ракеты и, соответственно, потребные перегрузки ракеты и динамическая ошибка наведения на кинематической траектории будут близки к нулю, в том числе и при переменных скоростях изменения углового положения цели и сближения ракеты с целью, т.е. будет обеспечиваться полет ракеты по полностью спрямленной траектории, не связанной с характером движений цели и ракеты.
Для пояснения предлагаемого способа наведения ракеты рассмотрим соотношение для полного потребного нормального ускорения ракеты Wn на кинематической траектории наведения (для простоты изложения только в одной независимой плоскости наведения, например, в вертикальной, где φk - кинематическая угловая координата ракеты), которое определяется зависимостью ([1], стр.26)

где  ,
,  - угловая скорость и угловое ускорение текущей координаты кинематической траектории наведения соответственно.
- угловая скорость и угловое ускорение текущей координаты кинематической траектории наведения соответственно.
Учитывая уравнение связи (2) метода наведения, запишем для угловой скорости  и углового ускорения
и углового ускорения  координаты точки кинематической траектории выражения
координаты точки кинематической траектории выражения

Тогда соотношение (8) для полного нормального ускорения ракеты с учетом выражений (9) примет вид

В соотношении (10) первые два слагаемых

представляют собой выражение, определяющее значение потребного нормального ускорения ракеты Wц, определяемого движением ЛВЦ в плоскости наведения (т.е. угловой скоростью  и угловым ускорением
и угловым ускорением  цели (ЛВЦ), [1], стр.78). Далее, учитывая, что в точке встречи ракеты с целью относительная дальность Δr=0, получим из выражения (10) соотношение для полного нормального ускорения ракеты в точке встречи
цели (ЛВЦ), [1], стр.78). Далее, учитывая, что в точке встречи ракеты с целью относительная дальность Δr=0, получим из выражения (10) соотношение для полного нормального ускорения ракеты в точке встречи

Налагая для соотношения (13) условие равенства потребного нормального ускорения ракеты нулю, т.е.

получим уравнение для определения текущего значения параметра А метода наведения в виде соотношения (6), коэффициенты которого задаются в виде функций U1, U2, определяемых соответственно соотношениями (7).
Таким образом, формируя по измеренным текущим координатам цели и ракеты (с использованием вычисленных их производных) значения функций U1 и U2 в соответствии с соотношениями (7), значение текущего потребного нормального ускорения ракеты Wц, определяемого движением ЛВЦ, в соответствии с соотношением (11) и решая в текущем времени наведения ракеты уравнение (6), получают требуемое текущее значение параметра А метода наведения, в соответствии с которым далее формируют угол упреждения для наведения ракеты в виде

и соответственно угловое смещение ракеты относительно ЛВЦ или по-другому опорную (кинематическую) траекторию наведения.
При использовании текущих значений функций U1, U2 в виде (7) и ускорения Wц в соответствии с соотношением (11) кинематическая траектория наведения в точке встречи ракеты с целью будет обеспечивать полное потребное нормальное ускорение ракеты Wn, равное нулю, т.е. будет обеспечиваться полет ракеты по полностью спрямленной траектории независимо от характера движения цели и ракеты. При этом снижаются потребные нормальные перегрузки ракеты и динамическая ошибка наведения, что обеспечивает повышение точности наведения и расширение условий применения и зоны поражения ракеты.
Предлагаемый способ наведения ракеты может быть реализован системой наведения ракеты, функциональная схема которой представлена на фиг.1.
Система наведения содержит пеленгатор цели (ПЦ) 1, контур управления ракетой, включающий в каждом из каналов тангажа и курса последовательно соединенные пеленгатор ракеты (ПР) 2, блок формирования линейного рассогласования между ракетой и опорной траекторией наведения (ЛО) 3, блок формирования команды управления ракетой, пропорциональной линейному рассогласованию между ракетой и опорной траекторией наведения (ФК) 4, устройство радиоуправления (РУ) 5 и ракету (Р) 6, блок формирования угла упреждения (УУ) 7 и блок формирования параметра метода наведения (ПМ) 8.
Элементы пеленгатор цели 1, пеленгатор ракеты 2, блок формирования линейного рассогласования между ракетой и опорной траекторией наведения 3, блок формирования команды управления ракетой, пропорциональной линейному рассогласованию между ракетой и опорной траекторией наведения 4, устройство радиоуправления 5 и блок формирования угла упреждения 7 представляют собой известные штатные элементы системы управления ракетой ([1], стр.129-130).
Блок формирования параметра метода наведения 8 может быть выполнен в виде счетно-решающих схем, например, на базе операционных усилителей ([3], И.М.Тетельбаум, Ю.Р.Шнейдер. Практика аналогового моделирования динамических систем. - М.: Энергоатомиздат, 1987), реализующих соотношения (6) и (7) для предлагаемого способа наведения ракеты.
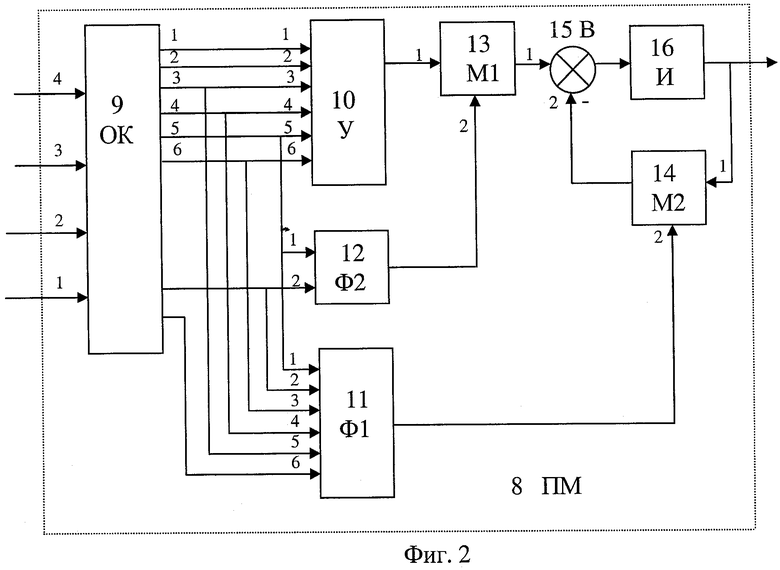
Функциональная схема такого блока приведена на фиг.2, где обозначено:
9 - блок обработки координат цели и ракеты (ОК);
10 - блок формирования сигнала, пропорционального потребному нормальному ускорению ракеты, определяемому движением ЛВЦ(У);
11 - блок формирования сигнала, пропорционального первой функции параметров относительного сближения ракеты с целью (Ф1);
12 - блок формирования сигнала, пропорционального второй функции параметров относительного сближения ракеты с целью (Ф2);
13, 14 - блоки умножения (M1, M2) - стр.125;
15 - блок вычитания (В) - стр.43;
16 - интегратор (И) - стр.43.
Блок 9 включает в себя набор (7 штук) дифференцирующе-сглаживающих устройств (стр.92), которые по поступающим на его входы 1, 2, 3 и 4 соответственно сигналам дальности до ракеты rp, дальности до цели rц, угловой координаты цели φц и скорости ракеты Vp формируют сигналы, пропорциональные их первым  ,
,  ,
,  ,
,  и вторым производным
и вторым производным  ,
,  ,
,  (для скорости ракеты только сигнал первой производной), и два блока вычитания, формирующих соответственно сигналы первой
(для скорости ракеты только сигнал первой производной), и два блока вычитания, формирующих соответственно сигналы первой  и второй
и второй  производных разностей дальностей цели и ракеты.
производных разностей дальностей цели и ракеты.
Блок 10 включает в себя блок деления (стр.125), три блока умножения (стр.125) и блоки суммирования и вычитания (стр.42-43), с помощью которых в соответствии с соотношением (11) по выходным сигналам блока 9 формируется сигнал, пропорциональный потребному нормальному ускорению ракеты Wц, определяемому движением ЛВЦ.
Блок 11 включает в себя три блока деления (стр.125) и блоки суммирования и вычитания (стр.42-43), с помощью которых в соответствии с первым выражением соотношения (7) по выходным сигналам блока 9 формируют сигнал, пропорциональный первой функции параметров относительного сближения ракеты с целью U1.
Блок 12 включает в себя блоки умножения и деления (стр.125), с помощью которых в соответствии со вторым выражением соотношения (7) по выходным сигналам блока 9 формируют сигнал, пропорциональный второй функции параметров относительного сближения ракеты с целью U2.
Система работает следующим образом. Пеленгатор цели 1 осуществляет сопровождение цели и измерение ее угловых координат и дальности. Пеленгатор ракеты 2 осуществляет захват ракеты на сопровождение и измерение ее угловых координат, дальности и скорости полета. Далее рассматривается работа одного канала системы наведения. Измеренные угловая координата ракеты φр и дальность до ракеты rp с выходов блока 2 поступают соответственно на первый и второй входы блока формирования линейного рассогласования между ракетой и опорной траекторией наведения 3, на третий вход которого поступает угловая координата цели φц с выхода блока 1. В блоке 3 с учетом сигнала угла упреждения φупр, поступающего на его четвертый вход с выхода блока 7, формируется сигнал линейного рассогласования h между координатами ракеты и опорной траектории в соответствии с соотношением

пропорционально которому в блоке 4 формируют команду управления ракетой. Сформированная команда управления посредством устройства радиоуправления 5 передается на ракету 6. Ракета, отрабатывая команды, наводится на цель.
Одновременно в текущем времени наведения с пеленгатора ракеты 2 измеренные сигналы дальности до ракеты rp и ее скорости полета Vp поступают соответственно на первый и четвертый входы блока формирования параметра метода наведения 8, на второй и третий входы которого поступают с выходов блока 1 соответственно сигналы дальности до цели rц и ее угловой координаты φц. Входы блока 8 являются также соответствующими входами блока обработки координат 9, где формируются соответствующие сигналы, пропорциональные первым и вторым производным координат цели, ракеты и разности их дальностей. Далее по выходным сигналам блока 9, поступающим на соответствующие входы блока 10 ( ,, Vp,
,, Vp,  , rp,
, rp,  ), блока 11 (rp,
), блока 11 (rp,  ,
,  , , Vp,
, , Vp,  ) и блока 12 (rp,
) и блока 12 (rp,  ), формируются соответственно сигнал, пропорциональный потребному нормальному ускорению ракеты Wц, определяемому движением ЛВЦ, сигнал, пропорциональный первой функции U1 параметров относительного сближения ракеты с целью, и сигнал, пропорциональный второй функции U2 параметров относительного сближения ракеты с целью. Сигнал, пропорциональный ускорению Wц, с выхода блока 10 поступает на первый вход первого блока умножения 13, на второй вход которого поступает сигнал, пропорциональный функции U2. Сигнал, пропорциональный функции U1, с выхода блока 11 поступает на первый вход второго блока умножения 14, на второй вход которого поступает выходной сигнал интегратора 16. Сигналы с выходов блоков умножения 13 и 14 поступают на соответствующие входы блока вычитания 15, образуя на его выходе, в соответствии с соотношением (6), сигнал, пропорциональный первой производной параметра метода наведения
), формируются соответственно сигнал, пропорциональный потребному нормальному ускорению ракеты Wц, определяемому движением ЛВЦ, сигнал, пропорциональный первой функции U1 параметров относительного сближения ракеты с целью, и сигнал, пропорциональный второй функции U2 параметров относительного сближения ракеты с целью. Сигнал, пропорциональный ускорению Wц, с выхода блока 10 поступает на первый вход первого блока умножения 13, на второй вход которого поступает сигнал, пропорциональный функции U2. Сигнал, пропорциональный функции U1, с выхода блока 11 поступает на первый вход второго блока умножения 14, на второй вход которого поступает выходной сигнал интегратора 16. Сигналы с выходов блоков умножения 13 и 14 поступают на соответствующие входы блока вычитания 15, образуя на его выходе, в соответствии с соотношением (6), сигнал, пропорциональный первой производной параметра метода наведения

Сигнал с выхода блока 15 поступает на вход интегратора 16, на выходе которого формируется сигнал, пропорциональный параметру метода наведения А, который и является выходным сигналом блока формирования параметра метода наведения 8.
Далее выходной сигнал блока 8 поступает на третий вход блока формирования угла упреждения 7, на первый и второй входы которого поступают соответственно сигналы дальностей до ракеты rp и цели rц соответственно с пеленгатора ракеты 2 и пеленгатора цели 1. В блоке 7 в соответствии с соотношением (14) формируется сигнал текущего угла упреждения φупр, который далее поступает на четвертый вход блока формирования линейного рассогласования между ракетой и опорной траекторией наведения 3.
Сформированный таким образом угол упреждения совместно с угловым положением ЛВЦ задают кинематическую (опорную) траекторию наведения, которая совместно с формируемыми сигналами управления обеспечивает наведение ракеты по спрямленной траектории независимо от характеров движения цели и сближения ракеты с целью, что снижает потребные перегрузки ракеты и динамическую ошибку наведения.
Предлагаемое техническое решение обеспечивает повышение динамической точности наведения и расширение условий применения ракеты, что выгодно отличает его от известных.
Источники информации
1. Ф.К.Неупокоев. Стрельба зенитными ракетами. - М.: Воениздат, 1991.
2. А.М.Батков, И.Б.Тарханов. Системы теленаведения. - М.: Машиностроение, 1971.
3. И.М.Тетельбаум, Ю.Р.Шнейдер. Практика аналогового моделирования динамических систем. - М.: Энергоатомиздат, 1987.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ НАВЕДЕНИЯ ТЕЛЕУПРАВЛЯЕМОЙ РАКЕТЫ | 2016 |
|
RU2645850C1 |
| СПОСОБ НАВЕДЕНИЯ ТЕЛЕУПРАВЛЯЕМОЙ РАКЕТЫ И СИСТЕМА НАВЕДЕНИЯ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2004 |
|
RU2260162C1 |
| СПОСОБ НАВЕДЕНИЯ ТЕЛЕУПРАВЛЯЕМОЙ РАКЕТЫ | 2011 |
|
RU2466345C1 |
| СПОСОБ НАВЕДЕНИЯ ТЕЛЕУПРАВЛЯЕМОЙ РАКЕТЫ | 2010 |
|
RU2437052C1 |
| СПОСОБ СТРЕЛЬБЫ УПРАВЛЯЕМОЙ РАКЕТОЙ | 2014 |
|
RU2559373C1 |
| СПОСОБ НАВЕДЕНИЯ ТЕЛЕУПРАВЛЯЕМОЙ РАКЕТЫ | 2002 |
|
RU2234041C2 |
| СПОСОБ УПРАВЛЕНИЯ РАКЕТОЙ | 2004 |
|
RU2280232C1 |
| СПОСОБ НАВЕДЕНИЯ ТЕЛЕУПРАВЛЯЕМОЙ РАКЕТЫ И СИСТЕМА НАВЕДЕНИЯ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2000 |
|
RU2192605C2 |
| СПОСОБ ТЕЛЕУПРАВЛЕНИЯ РАКЕТОЙ | 2011 |
|
RU2465535C1 |
| СПОСОБ УПРАВЛЕНИЯ РАКЕТОЙ | 2001 |
|
RU2205360C2 |
Изобретение относится к ракетной технике и предназначено для использования в системах наведения телеуправляемых ракет. Способ наведения ракеты на цель включает в себя измерение координат цели и ракеты. При этом угловое смещение кинематической траектории наведения ракеты относительно линии визирования цели формируют пропорционально параметру метода наведения ракеты и текущей разности дальностей до цели и ракеты. Параметр метода наведения определяют в текущем времени наведения ракеты с момента начала формирования указанного углового смещения из соотношения
 ,
,
где А,  - параметр метода наведения ракеты и его производная соответственно; U1, U2 - функции параметров относительного сближения ракеты с целью, определяемые соответственно по первому и второму математическим соотношениям; Wц - текущее значение потребного нормального ускорения ракеты, определяемого движением линии визирования цели. Заявленное изобретение обеспечивает снижение потребных нормальных перегрузок ракеты и динамической ошибки наведения за счет спрямления кинематической траектории независимо от характера движения цели и скорости сближения ракеты с целью. 2ил.
- параметр метода наведения ракеты и его производная соответственно; U1, U2 - функции параметров относительного сближения ракеты с целью, определяемые соответственно по первому и второму математическим соотношениям; Wц - текущее значение потребного нормального ускорения ракеты, определяемого движением линии визирования цели. Заявленное изобретение обеспечивает снижение потребных нормальных перегрузок ракеты и динамической ошибки наведения за счет спрямления кинематической траектории независимо от характера движения цели и скорости сближения ракеты с целью. 2ил.
Способ наведения ракеты, включающий измерение координат цели и ракеты и угловое смещение кинематической траектории наведения ракеты относительно линии визирования цели в плоскости наведения, которое формируют пропорционально параметру метода наведения ракеты и текущей разности дальностей до цели и ракеты, отличающийся тем, что параметр метода наведения определяют в текущем времени наведения ракеты с момента начала формирования углового смещения кинематической траектории из соотношения

где А,  - параметр метода наведения ракеты и его производная соответственно;
- параметр метода наведения ракеты и его производная соответственно;
U1, U2 - функции параметров относительного сближения ракеты с целью;
Wц - текущее значение потребного нормального ускорения ракеты, определяемого движением линии визирования цели в плоскости наведения, причем текущие значения функций параметров относительного сближения ракеты с целью U1, U2 определяют соответственно по соотношениям
где 
 - соответственно первая и вторая производные разности дальностей до цели и ракеты;
- соответственно первая и вторая производные разности дальностей до цели и ракеты;
rp,  - соответственно дальность до ракеты и ее первая производная;
- соответственно дальность до ракеты и ее первая производная;
Vp,  - соответственно скорость ракеты и ее первая производная.
- соответственно скорость ракеты и ее первая производная.
| СПОСОБ КОМАНДНОГО ТЕЛЕУПРАВЛЕНИЯ РАКЕТОЙ | 2004 |
|
RU2280227C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ГРАНИЦ ОБЛАСТИ ВОЗМОЖНОГО ПУСКА РАКЕТЫ | 2001 |
|
RU2206044C2 |
| СПОСОБ НАВЕДЕНИЯ ТЕЛЕУПРАВЛЯЕМОЙ РАКЕТЫ | 2002 |
|
RU2234041C2 |
| Зондирующее устройство для определения высоты слоя пены в нефтяном сепараторе | 1985 |
|
SU1312398A1 |
| US 6181988 B1, 30.01.2001. | |||

