Изобретение относится к ракетной технике и предназначено для использования в системах наведения телеуправляемых ракет.
Известен способ наведения телеуправляемой ракеты, включающий измерение координат цели и ракеты, формирование опорной (кинематической) траектории наведения ракеты, определение рассогласования между ракетой и опорной траекторией наведения ракеты, формирование команды управления ракетой, пропорциональной этому рассогласованию, и наведение по ней ракеты на цель ([1], с. 327-329).
Известный способ имеет низкую точность наведения ракеты на подвижные цели из-за возникающей динамической ошибки, определяемой параметрами движения цели и инерционностью управления ракетой. Динамическая ошибка наведения ракеты определяется соотношением ([2], с.65):
h≈Wk/Ko, (1)
где
Wk - нормальное ускорение, соответствующее движению ракеты по опорной траектории наведения:
Ko - коэффициент усиления контура управления ракетой, характеризующий инерционность управления.
Выбор в системе наведения коэффициента усиления Ko связан с противоречивыми требованиями. С одной стороны, при увеличении коэффициента уменьшается инерционность управления и повышается динамическая точность наведения ракеты. С другой стороны, с увеличением коэффициента усиления возрастает колебательность наведения, контур управления ракетой начинает реагировать на слабые возмущения. Возрастают при этом также флуктуационные ошибки наведения. При больших значениях коэффициента Ko возможна потеря устойчивости наведения ракеты.
Известна система наведения телеуправляемой ракеты, состоящая из пеленгатора цели и контура управления ракетой, включающего в каждом канале тангажа и курса последовательно соединенные пеленгатор ракеты, блок формирования линейного рассогласования между ракетой и опорной траекторией наведения ракеты, второй вход которого подключен к выходу пеленгатора цели, блок формирования команды управления, пропорциональной линейному рассогласованию между ракетой и опорной траекторией, устройство передачи команд управления на ракету и ракету ([1], с. 327-329, 380).
Известная система обладает низкой точностью наведения ракеты на подвижные цели вследствие своей инерционности, определяемой условием обеспечения собственной устойчивости.
Наиболее близким к предлагаемому является способ наведения телеуправляемой ракеты, включающий измерение координат цели и ракеты, формирование опорной траектории наведения ракеты, определение линейного рассогласования между ракетой и опорной траекторией наведения ракеты, формирование команды управления, пропорциональной линейному рассогласованию между ракетой и опорной траекторией наведения ракеты, определение динамической ошибки наведения ракеты по опорной траектории, формирование корректирующего сигнала, смещающего опорную траекторию ракеты на величину динамической ошибки, и наведение ракеты с учетом корректирующего сигнала ([1], с. 391-392).
Наиболее близкой к предлагаемой является система наведения телеуправляемой ракеты, состоящая из пеленгатора цели и контура управления ракетой, включающего в каждом канале тангажа и курса блок формирования сигнала компенсации динамической ошибки, вход которого подключен к первому выходу пеленгатора цели, последовательно соединенные пеленгатор ракеты, блок формирования линейного рассогласования между ракетой и опорной траекторией наведения ракеты, второй вход которого подключен к второму выходу пеленгатора ракеты, а третий и четвертый входы - соответственно к первому и второму выходам пеленгатора цели, блок формирования команды управления, пропорциональной линейному рассогласованию между ракетой и опорной траекторией наведения ракеты, сумматор, второй вход которого подключен к выходу блока формирования сигнала компенсации динамической ошибки, устройство передачи команд управления и ракету ([1], с. 380, 393-395).
Суть известного способа наведения телеуправляемой ракеты и системы наведения, его реализующей, заключается в том, что в формируемую команду управления, пропорциональную линейному рассогласованию между ракетой и опорной траекторией, вводится в течение всего процесса наведения корректирующий сигнал, смещающий опорную траекторию наведения на величину вычисленной динамической ошибки движения ракеты по требуемой опорной траектории. Такой способ параметрической коррекции ошибки позволяет уменьшить динамическую ошибку наведения телеуправляемой ракеты на подвижные цели. Вместе с тем известные способ наведения ракеты и система, его реализующая, обладают недостатками, которые сводятся к следующим:
динамическая ошибка наведения компенсируется не полностью из-за присущей способу физической нереализуемости теоретически потребного динамического коэффициента пропорциональности между формируемым корректирующим сигналом и определяемой динамической ошибкой. Компенсируется только установившаяся динамическая ошибка наведения ракеты на неманеврирующую цель ([1], с. 393);
способ и система наведения требуют определения динамической ошибки наведения, для вычисления которой необходимо определять производные от угловых координат опорной траектории (кинематическое возмущение), что в условиях измеряемых зашумленных координат цели и ракеты сделать с необходимой точностью практически невозможно и к тому же приводит к увеличению флуктуационной составляющей ошибки наведения;
способ и система наведения не обеспечивают компенсацию динамической ошибки в переходном процессе наведения, что имеет место при наведении ракеты на маневрирующую цель, представляющую наибольшую опасность.
способ и система наведения компенсируют только динамическую ошибку, связанную с движением цели;
способ и система наведения обладают существенной погрешностью компенсации динамической ошибки при разбросе коэффициентов передачи ракеты и составляющих элементов системы наведения;
способ и система наведения не реализуют все располагаемые маневренные (энергетические) возможности ракеты для парирования собственной погрешности компенсации динамической ошибки.
Указанные недостатки снижают точность наведения ракеты на подвижные цели и особенно на цели, совершающие маневр.
Целью настоящего изобретения является повышение точности наведения телеуправляемой ракеты на подвижные цели, в том числе и на маневрирующие.
Поставленная цель достигается тем, что в способе наведения телеуправляемой ракеты, включающем измерение координат цели и ракеты, формирование опорной траектории наведения ракеты, определение линейного рассогласования между ракетой и опорной траекторией наведения ракеты, формирование команды управления, пропорциональной линейному рассогласованию между ракетой и опорной траекторией, определение динамической ошибки наведения ракеты и последующее формирование корректирующего сигнала, смещающего опорную траекторию ракеты на величину этой ошибки, определяют время, оставшееся до встречи ракеты с целью, формируют дополнительную корректирующую команду, по величине пропорциональную располагаемой перегрузке ракеты, и длительностью, равной прогнозируемому времени совмещения ракеты с целью в точке встречи под действием этой корректирующей команды, сравнивают время, оставшееся до встречи ракеты с целью, и длительность корректирующей команды, и в момент их равенства запоминают корректирующую команду, и далее наведение ракеты осуществляют с учетом корректирующей команды.
Поставленная цель достигается тем, что в систему наведения телеуправляемой ракеты, состоящую из пеленгатора цели и контура управления ракетой, включающего в каждом канале тангажа и курса блок формирования сигнала компенсации динамической ошибки, вход которого подключен к первому выходу пеленгатора цели, последовательно соединенные пеленгатор ракеты, блок формирования линейного рассогласования между ракетой и опорной траекторией наведения ракеты, второй вход которого подключен к второму выходу пеленгатора ракеты, а третий и четвертый входы - соответственно к первому и второму выходам пеленгатора цели, блок формирования команды управления, пропорциональной линейному рассогласованию между ракетой и опорной траекторией наведения ракеты, сумматор, второй вход которого подключен к выходу блока формирования сигнала компенсации динамической ошибки, устройство передачи команд управления и ракету, введены функциональный преобразователь, дифференцирующе-сглаживающий фильтр, вход которого подключен к выходу блока формирования линейного рассогласования между ракетой и опорной траекторией наведения ракеты, последовательно соединенные сглаживающий фильтр, вход которого подключен к выходу сумматора, блок выделения модуля, блок вычитания, второй вход которого подключен к выходу задатчика опорного сигнала, первый блок умножения, второй вход которого подключен к выходу функционального преобразователя, и блок формирования длительности корректирующей команды, второй и третий входы которого подключены соответственно к первому и второму выходам дифференцирующе-сглаживающего фильтра, также введены последовательно соединенные блок выделения знака-сигнала, вход которого подключен к первому выходу дифференцирующе-сглаживающего фильтра, второй блок умножения, второй вход которого подключен к выходу блока вычитания, управляемый коммутатор и блок запоминания, блок сравнения, блок определения времени, оставшегося до встречи ракеты с целью, первый и второй входы которого подключены соответственно к второму и третьему выходам пеленгатора цели, третий и четвертый входы - соответственно к второму и третьему выходам пеленгатора ракеты, а выход соединен с первым входом блока сравнения, второй вход которого подключен к выходу блока формирования длительности корректирующей команды, а выход блока сравнения соединен с командным входом управляемого коммутатора, причем выход блока запоминания соединен со вторым информационным входом управляемого коммутатора, второй вход которого соединен с третьим входом сумматора.
Введение в способ и систему наведения ракеты новых соответственно операций и блоков с их связями позволило по сравнению с известными повысить точность наведения ракеты. Суть предлагаемого изобретения заключается в том, что под действием сформированной корректирующей команды ракета в точке встречи совмещается с целью на величину имевшегося в силу указанных выше причин линейного рассогласования между ракетой и опорной траекторией (ошибки наведения), т.е. промах по цели сводится к нулю. При этом коррекция процесса наведения осуществляется за относительно малое (по сравнению с временем наведения ракеты) время, которое определяется располагаемой перегрузкой ракеты, т. е. в процессе выбора ошибки наведения реализуются все маневренные возможности ракеты. Формирование длительности корректирующей команды с учетом линейного рассогласования между ракетой и опорной траекторией, определяемого по непосредственным измерениям координат цели у ракеты, делает процесс компенсации ошибки наведения независимым от инерционности контура управления ракетой. Инерционность компенсации ошибки практически определяется только инерционность самой ракеты. Предлагаемые способ и система наведения ракеты обеспечивают компенсацию ошибки наведения независимо от природы ее возникновения и вида движения цели.
В известных же способе и системе наведения ракеты корректирующая команда смещает в течение всего процесса наведения опорную траекторию наведения ракеты на величину вычисленной динамической ошибки наведения. При этом требуется определять текущую динамическую ошибку наведения, что и определяет существенную погрешность известных технических решений. К тому же известные решения компенсируют только одну из составляющих промаха - динамическую ошибку.
Сравнение заявляемых технических решений с известными позволило установить соответствие их критерию "новизна". При изучении других известных технических решений в данной области техники признаки, отличающие заявляемое изобретение от известных, не были выявлены, и поэтому они обеспечивают заявляемым техническим решениям соответствие критерию "существенные отличия".
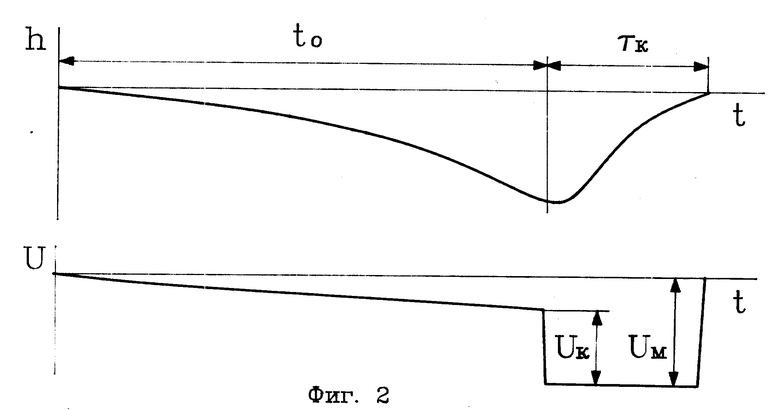
Схема и эпюры, поясняющие процесс наведения ракеты, приведены на фиг. 1, 2 соответственно, функциональная схема системы наведения телеуправляемой ракеты - на фиг. 3.
На фиг. 1, 2 обозначено:
Ц - текущее положение цели;
Р - текущее положение ракеты;
ТВ - точка встречи ракеты с целью;
ϕц - угловое положение цели;
Дц - дальность до цели;
ϕp - угловое положение ракеты;
Др - дальность до ракеты;
h - линейное рассогласование между ракетой и опорной траекторией;
t - время;
to - время наведения ракеты до коррекции траектории;
τк - длительность коррекции;
U - команда управления ракетой;
Uк - корректирующая команда;
Uм - максимальная команда управления ракетой.
Наведение ракеты на цель производится по заданному закону сближения ракеты с целью, определяемому методом наведения, например, по методу трех точек или по методу спрямления траектории и т.п. Определенному методу наведения соответствует опорная (кинематическая) траектория наведения ракеты, т. е. траектория, по которой должна двигаться ракета при имеющем место законе движения цели. Опорная траектория строится по измеренным координатам цели и возможно необходимому углу упреждения. Например, для методов трех точек и спрямления траектории угловая координата опорной траектории (в соответствующей плоскости наведения) определяется соответственно соотношениями [2]:
ϕк= ϕц, ϕк= ϕц+Af(Дц-Дp), (2)
где Af - параметр метода наведения.
При реальном наведении вследствие действия возмущений, инерционности управления и т. д. ракета будет двигаться по динамической траектории, смещенной относительно опорной на величину динамической ошибки h. Линейное рассогласование между ракетой и опорной траекторией будет равно:
h = Дp(ϕк-ϕp). (3)
Команда управления ракетой, формируемая пропорционально линейному рассогласованию между ракетой и опорной траекторией, определяется, например, соотношением ([1], с.370): (4)
(4)
где  - скорость изменения линейного рассогласования;
- скорость изменения линейного рассогласования;
T - весовой коэффициент, определяемый из условия обеспечения устойчивости контура управления ракетой.
Сигнал компенсации динамической ошибки определяется соотношением ([1], с.304): (5)
(5)
где F(t) - известная функция, определяемая летно-баллистическими характеристиками ракеты.
Корректирующая команда формируется следующим образом. Определяется время, оставшееся до встречи ракеты с целью, например, по измеренным дальности до цели Дц, дальности до ракеты Др и скоростям их изменения  :
: (6)
(6)
и определяется корректирующая команда для совмещения в точке встречи траектории ракеты с опорной траекторией (т.е. с целью) за время, определяемое из условия использования для совмещения всей располагаемой перегрузки ракеты.
Величину (уровень) корректирующей команды можно определять таким образом. Для ракеты известна функциональная зависимость между командой управления и развиваемой перегрузкой n=f(U). (7)
Наведение ракеты по динамической траектории осуществляется под действием команды управления Uh, которой соответствует развиваемая ракетой перегрузка nh. Тогда величина перегрузки ракеты, которая может использоваться для коррекции траектории, равна: ,
,
где np - известная для ракеты зависимость располагаемой перегрузки по времени полета.
Величина и знак корректирующей команды определяются зависимостью
Uк=f1(nк) Sign (h), (9)
где f1 - функциональная зависимость обратная (7);
Sign (h) - функция знака.
Для ракет, как правило, зависимость (6) имеет линейный характер ([2], с. 115). В этом случае величина корректирующей команды определяется соотношением:
где перегрузка, используемая для коррекции, соотношением: .
.
Текущее прогнозируемое время совмещения ракеты с целью под действием корректирующей команды на величину имеющейся ошибки и соответственно равная ему длительность текущей корректирующей команды могут быть определены по соотношению ([3], с.274): .
.
Далее сравнивают текущее время, оставшееся до встречи ракеты с целью, полученное по соотношению (6), с текущей длительностью корректирующей команды, определяемой по соотношению (12), и, начиная с момента их равенства и далее, в течение всего времени до встречи ракеты с целью, сформированную и запомненную на момент выполнения этого равенства корректирующую команду суммируют с командой, формируемой пропорционально линейному рассогласованию между ракетой и опорной траекторией и производят наведение ракеты на цель по суммарной команде управления. Отрабатывая команду управления, ракета переходит с динамической траектории на скорректированную, совмещаясь с целью в точке встречи, чем ликвидируется ошибка и обеспечивается повышение точности наведения на цель.
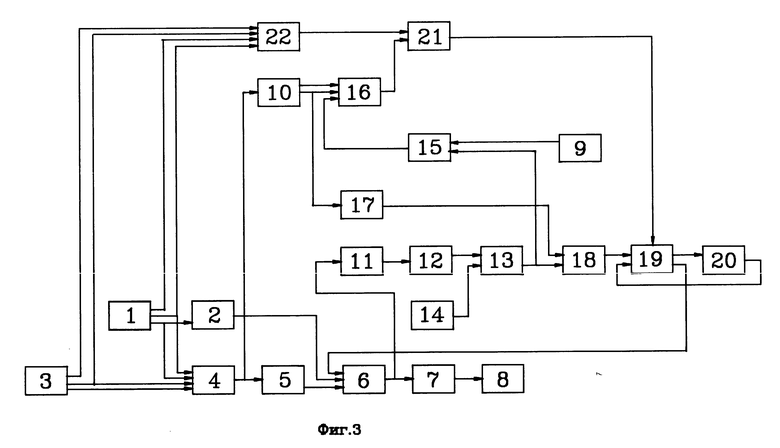
Система наведения телеуправляемой ракеты содержит пеленгатор цели 1 и контур управления ракетой, включающий в каждом из каналов тангажа и курса блок формирования сигнала компенсации динамической ошибки 2, вход которого подключен к первому выходу пеленгатора цели 1, последовательно соединенные пеленгатор ракеты 3, блок формирования линейного рассогласования между ракетой и опорной траекторией наведения ракеты 4, второй вход которого подключен к второму выходу пеленгатора ракеты 3, а третий и четвертый входы - соответственно к первому и второму выходам пеленгатора цели 1, блок формирования команды управления пропорциональной линейному рассогласованию между ракетой и опорной траекторией наведения ракеты 5, сумматор 6, второй вход которого подключен к выходу блока формирования сигнала компенсации динамической ошибки 2, устройство передачи команд управления 7 и ракету 8, функциональный преобразователь 9, дифференцирующе-сглаживающий фильтр 10, вход которого подключен к выходу блока формирования линейного рассогласования между ракетой и опорной траекторией наведения ракеты 4, последовательно соединенные сглаживающий фильтр 11, вход которого подключен к выходу сумматора 6, блок выделения модуля 12, блок вычитания 13, второй вход которого подключен к выходу задатчика опорного сигнала 14, первый блок умножения 15, второй вход которого подключен к выходу функционального преобразователя 9, и блок формирования длительности корректирующей команды 16, второй и третий входы которого подключены соответственно к первому и второму выходам дифференцирующе-сглаживающего фильтра 10, также введены последовательно соединенные блок выделения знака сигнала 17, вход которого подключен к первому выходу дифференцирующе-сглаживающего фильтра 10, второй блок умножения 18, второй вход которого подключен к выходу блока вычитания 13, управляемый коммутатор 19 и блок запоминания 20, блок сравнения 21, блок определения времени, оставшегося до встречи ракеты с целью 22, первый и второй входы которого подключены соответственно к второму и третьему выходам пеленгатора цели 1, третий и четвертый входы - соответственно к второму и третьему выходам пеленгатора ракеты 3, а выход соединен с первым входом блока сравнения 21, второй вход которого подключен к выходу блока формирования длительности корректирующей команды 16, а выход блока сравнения 21 соединен с командным входом управляемого коммутатора 19, причем выход блока запоминания 20 соединен с вторым информационным входом управляемого коммутатора 29, второй выход которого соединен с третьим входом сумматора 6.
Составляющие элементы системы: пеленгатор цели 1, пеленгатор ракеты, устройство передачи команд управления 7 - представляют собой известные штатные элементы систем наведения ракет ([4], с.335).
Элементы - блок формирования линейного рассогласования между ракетой и опорной траекторией наведения ракеты 4, блок формирования команды управления, пропорциональной линейному рассогласованию между ракетой и опорной траекторией наведения ракеты 5, блок формирования сигнала компенсации динамической ошибки 2 также являются известными устройствами систем наведения телеуправляемых ракет и могут быть выполнены на аналоговых счетно-решающих элементах ([1], с.371, 394).
Элементы - сумматор 6, блок вычитания 13, блоки умножения 15, 18, функциональный преобразователь 9, блок выделения знака сигнала 17, дифференцирующе-сглаживающий фильтр 10, сглаживающий фильтр 11, блок сравнения 21, блок запоминания 20 могут быть выполнены, например, на базе операционных усилителей ([5] , соответственно с. 42, 43, 125, 196, 164, 82 (1.4.8), 232, 250 (4.5.1)).
Управляемый коммутатор 19 реализуется, например, на базе управляемых ключей ([6], с.378).
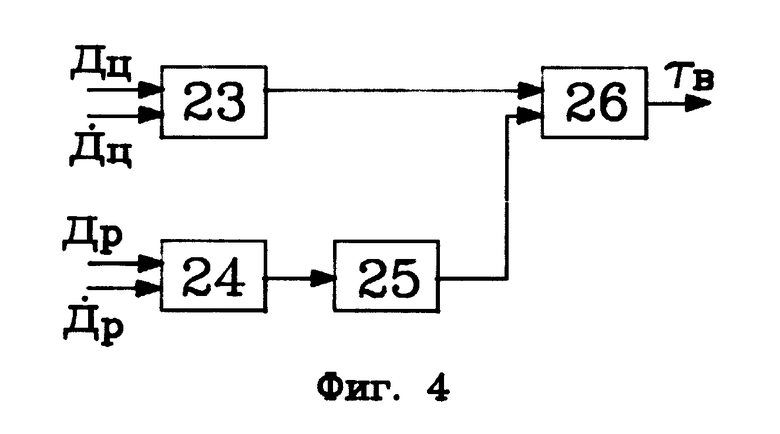
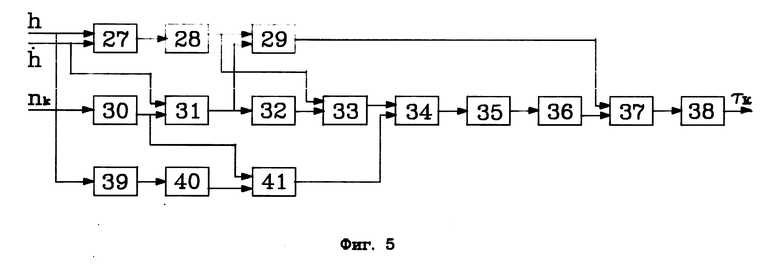
Блок определения времени, оставшегося до встречи ракеты с целью 22, блок определения длительности корректирующей команды 16 могут быть выполнены, например, в виде решающих схем [5] на базе операционных усилителей, реализующих соответственно соотношения (6), (12). Функциональные схемы этих блоков приведены соответственно на фиг. 4, 5, на которых обозначено:
23, 24 - блоки вычитания (с.43);
25, 40 - блоки выделения модуля (с.144);
26, 31, 41 - блоки деления (с.125);
30, 39 - масштабные усилители (с.42);
27, 29, 33 - блоки умножения (с.125);
28 - блок выделения знака сигнала (с.146);
32 - блок возведения в квадрат (с.179);
35, 38 - ограничитель входного сигнала (с.128 (2.1.16);
36, - блок извлечения квадратного корня (с.186);
34, 37 - сумматоры (с.42).
Величина постоянного опорного сигнала, подаваемого на второй вход блока вычитания 13, устанавливается равной максимально возможной команде управления ракетой, т.е. команде, при которой управляющий орган ракеты, например руль, устанавливается в такое положение, при котором ракета развивает располагаемую перегрузку. Опорный сигнал может задаваться, например, положительным напряжением с блока питания, которое масштабируется операционным усилителем.
Система наведения телеуправляемой ракеты работает следующим образом. Пеленгатор цели 1 осуществляет сопровождение цели и измеряет координаты цели: азимут, угол места, дальность и скорость изменения дальности. После запуска ракеты 8 пеленгатор ракеты 3 захватывает на сопровождение ракету 8 и измеряет ее координаты: азимут, угол места, дальность и скорость изменения дальности. Далее рассматривается работа одного канала наведения, например в угломестной плоскости. Измеренные угловые координаты цели и ракеты поступают соответственно на первый и третий, а дальности до ракеты и цели соответственно на второй и четвертый входы блока формирования линейного рассогласования между ракетой и опорной траекторией ракеты 4. В блоке 4 формируется опорная траектория ракеты и сигнал линейного рассогласования между ракетой и опорной траекторией, который поступает на вход блока формирования команды управления, пропорциональной линейному рассогласованию между ракетой и опорной траекторией 5. С выхода пеленгатора цели 1 угловая координата цели поступает также в блок формирования сигнала компенсации динамической ошибки 2, с выхода которого сигнал компенсации динамической ошибки поступает на второй вход сумматора 6. Сформированная команда управления ракетой с выхода блока 5 поступает на первый вход сумматора 6, где суммируется с сигналом компенсации динамической ошибки и далее устройством передачи команд управления 7 передается на ракету 8. Ракета 8 под действием этой команды наводится на цель по динамической траектории с ошибкой, вызванной движением цели, инерционностью управления, определяемой реализуемым коэффициентом усиления контура управления, и погрешностью формирования компенсирующего сигнала. В то же время на первый и второй входы блока определения времени, оставшегося до встречи ракеты с целью 22, со второго и третьего выходов пеленгатора цели 1 поступают соответственно сигналы дальности до цели и скорости ее изменения, а на третий и четвертый входы соответственно со второго и третьего выходов пеленгатора ракеты 3 - сигналы дальности до ракеты и скорости ее изменения. С выхода блока 22 сигнал, пропорциональный времени, оставшемуся до встречи ракеты с целью, поступает на первый вход блока сравнения 21.
Сигнал линейного рассогласования между ракетой и опорной траекторией с выхода блока 4 поступает также на вход дифференцирующе-сглаживающего фильтра 10, где происходит его сглаживание и одновременно выработка сглаженного сигнала скорости изменения линейного рассогласования между ракетой и опорной траекторией наведения ракеты, которые поступают соответственно на третий и второй входы блока определены длительности корректирующей команды 16.
Команда управления, передаваемая на ракету 8, с выхода сумматора 6 поступает также на сглаживающий фильтр 11, где сглаживается и далее в блоке 12 выделяется модуль ее значения, сигнал которого поступает на первый вход блока вычитания 13, на второй вход которого с задатчика опорного сигнала 14 поступает сигнал, несущий значение модуля максимально возможной команды управления ракетой. Таким образом на выходе блока вычитания 13 получается сигнал текущей величины (уровня) корректирующей команды. Далее сигнал, несущий величину корректирующей команды, поступает на второй вход второго блока умножения 18 и на первый вход первого блока умножения 15. На второй вход первого блока умножения 15 поступает с выхода функционального преобразователя 9 сигнал, пропорциональный располагаемой нормальной перегрузке ракеты 8 в функции времени ее полета. На выходе первого блока умножения 15 получается сигнал, пропорциональный текущей нормальной перегрузке, которая используется ракетой для отработки сформированной корректирующей команды.
Сглаживание сигналов линейного рассогласования между ракетой и опорной траекторией, скорости его изменения и команды управления проводится для исключения ложной выработки корректирующей команды и повышения точности формирования ее длительности.
Сигнал, пропорциональный располагаемой корректирующей перегрузке, поступает далее с выхода блока 15 на первый вход блока определения длительности корректирующей команды 16, где определяется длительность команды, корректирующей траекторию движения ракеты, сигнал пропорциональный которой поступает на второй вход блока сравнения 21.
Со второго выхода дифференцирующе-сглаживающего фильтра 10 сигнал, пропорциональный скорости изменения линейного рассогласования между ракетой и опорной траекторией, поступает на вход блока выделения знака 17, где формируется его знак, который далее поступает на первый вход второго блока умножения 18. На выходе блока 18 получается сигнал текущего значения корректирующей команды со знаком, необходимым для парирования в точке встречи имеющегося рассогласования между ракетой и опорной траекторией наведения. Далее сигнал, несущий значение корректирующей команды, с выхода блока 18 поступает на первый информационный вход управляемого коммутатора 19, откуда через его нормально замкнутые контакты на вход блока запоминания 20. Запомненное в блоке 20 текущее значение сигнала корректирующей команды поступает на второй информационный вход управляемого коммутатора 19 - на его нормально разомкнутые контакты.
Если время, оставшееся до встречи ракеты с целью, больше длительности корректирующей команды, определенной в блоке 16 исходя из располагаемых маневренных свойств ракеты, то с блока сравнения 21 на командный вход управляемого коммутатора 19 поступает запирающий сигнал, при этом через нормально замкнутые контакты управляемого коммутатора 19 на вход блока запоминания 20 поступает текущее значение корректирующей команды, т.е. непрерывно происходит обмен запоминаемого значения корректирующей команды. При этом выход блока запоминания 20 подключен к нормально разомкнутым контактам управляемого коммутатора 19, т.е. корректирующая команда с выхода блока 20 не поступает на сумматор 6 и соответственно на управление ракетой.
Если время, оставшееся до встречи ракеты с целью, определенное в блоке 22, равно длительности корректирующей команды, то сигнал на выходе блока сравнения 21 меняет свое состояние, которое, управляя командным входом управляемого коммутатора 19, размыкает его нормально замкнутые контакты и замыкает нормально разомкнутые. Такое состояние управляемого коммутатора 19 сохраняется до конца наведения ракеты (до встречи ракеты с целью). При этом в блоке 20 запоминается величина корректирующей команды, которая имела место в момент выполнения равенства времени, оставшегося до встречи ракеты с целью, и длительности корректирующей команды. Эта запомненная корректирующая команда в течение оставшегося времени наведения ракеты с блока запоминания 20 через замкнутые контакты управляемого коммутатора 19 поступает на третий вход сумматора 6, где суммируется с командой, сформированной пропорционально линейному рассогласованию между ракетой и опорной траекторией, и передается далее на ракету 8. Ракета, отрабатывая корректирующую команду, переходит с динамической траектории наведения на опорную, совмещаясь с целью в точке встречи.
Таким образом обеспечивается в точке встречи ракеты с целью компенсация ошибки наведения ракеты независимо от причин ее возникновения и за минимально возможное время с использованием всех располагаемых маневренных возможностей ракеты. Процесс наведения ракеты и выбор накопившейся ошибки при этом не зависит от природы и причин возникновения ошибки, инерционности контура управления, имеющего ограниченное быстродействие, и не требует определения параметров, действующего на контур управления ракетой, кинематического возмущения, связанного с движением цели, что и обеспечивает высокую точность наведения.
Итак, предлагаемые способ наведения телеуправляемой ракеты и система наведения для его реализации позволяют повысить точность наведения телеуправляемой ракеты на цель, в том числе и на маневрирующую, что выгодно отличает их от известных.
Источники информации
1. А.А. Лебедев, В.А. Карабанов. Динамика систем управления беспилотными летательными аппаратами. М.: Машиностроение, 1965.
2. Ф.К. Неупокоев. Стрельба зенитными ракетами. М.: Воениздат, 1980.
3. Под ред. В.М. Понамарева. Нелинейная оптимизация систем автоматического управления. М.: Машиностроение, 1970.
4. Под ред. В.В. Григорина-Рябова. Радиолокационные устройства. М.: Советское радио, 1970.
5. И.М. Тетельбаум, Ю.Р. Шнейдер. Практика аналогового моделирования динамических систем. М.: Энергоатомиздат, 1987.
6. С.В. Якубовский и др. Аналоговые и цифровые интегральные микросхемы. М.: Радио и связь, 1985.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА НАВЕДЕНИЯ ТЕЛЕУПРАВЛЯЕМОЙ РАКЕТЫ | 2000 |
|
RU2191345C2 |
| СПОСОБ НАВЕДЕНИЯ ТЕЛЕУПРАВЛЯЕМОЙ РАКЕТЫ | 2010 |
|
RU2437052C1 |
| СПОСОБ НАВЕДЕНИЯ РАКЕТЫ | 2009 |
|
RU2426969C2 |
| СПОСОБ НАВЕДЕНИЯ ТЕЛЕУПРАВЛЯЕМОЙ РАКЕТЫ И СИСТЕМА НАВЕДЕНИЯ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2000 |
|
RU2192605C2 |
| СПОСОБ НАВЕДЕНИЯ ТЕЛЕУПРАВЛЯЕМОЙ РАКЕТЫ И СИСТЕМА НАВЕДЕНИЯ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2004 |
|
RU2260162C1 |
| СПОСОБ НАВЕДЕНИЯ ТЕЛЕУПРАВЛЯЕМОЙ РАКЕТЫ | 2002 |
|
RU2234041C2 |
| СПОСОБ ИСПЫТАНИЯ ТЕЛЕУПРАВЛЯЕМОЙ РАКЕТЫ | 2000 |
|
RU2190184C2 |
| СПОСОБ КОМАНДНОГО ТЕЛЕУПРАВЛЕНИЯ РАКЕТОЙ | 2000 |
|
RU2188381C2 |
| СПОСОБ НАВЕДЕНИЯ ТЕЛЕУПРАВЛЯЕМОЙ РАКЕТЫ | 1997 |
|
RU2122700C1 |
| СПОСОБ НАВЕДЕНИЯ ТЕЛЕУПРАВЛЯЕМОЙ РАКЕТЫ | 2011 |
|
RU2466345C1 |
Использование: изобретение относится к ракетной технике и может использоваться в системах наведения телеуправляемых ракет. Сущность изобретения: при наведении ракеты определяют время, оставшееся до встречи ракеты с целью, формируют дополнительную корректирующую команду, по величине пропорциональную располагаемой перегрузке ракеты, и длительностью, равной прогнозируемому времени совмещения ракеты с целью в точке встречи под действием этой корректирующей команды, сравнивают время, оставшееся до встречи ракеты с целью, и длительность корректирующей команды, и в момент их равенства запоминают корректирующую команду и далее наведение ракеты осуществляют с учетом корректирующей команды. За счет использования системы наведения в точке встречи ракеты с целью обеспечивается компенсация ошибки наведения ракеты независимо от времени ее возникновения и за минимально возможное время с использованием всех располагаемых маневренных возможностей ракеты. 2 с.п. ф-лы, 5 ил.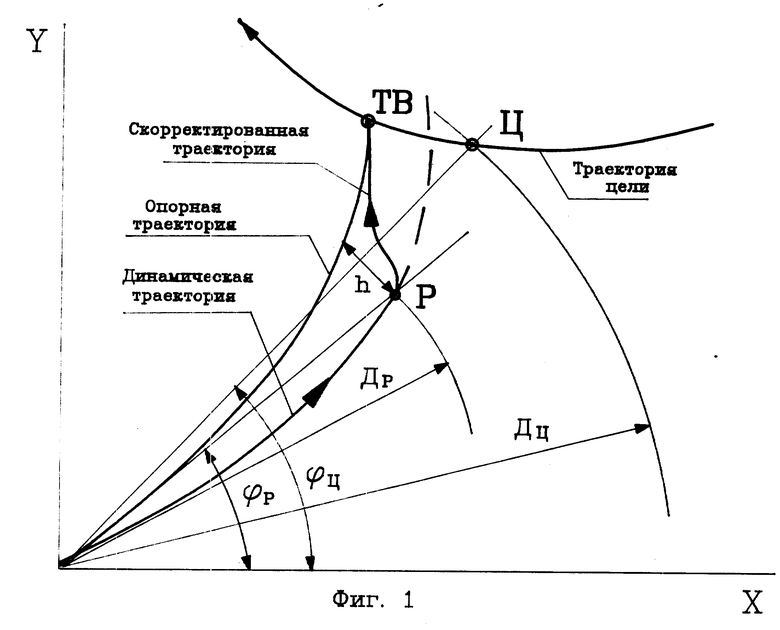
| А.А.Лебедев, В.А.Карабанов | |||
| "Динамика систем управления беспилотными летательными аппаратами", М., "Машиностроение", 1965 г., с | |||
| Велосипед, приводимый в движение силой тяжести едущего | 1922 |
|
SU380A1 |
