Изобретение относится к автоматике и вычислительной технике и может быть использовано в автоматизированных системах сбора информации и управления, например, в системах идентификации перемещающихся объектов для их автоматического адресования.
Известно устройство для считывания информации (см. патент России 1305734, МКИ G 06 K 7/14, 1993 г). Данное устройство содержит излучатели света, перфожетон с информацией в виде кода числа, фотоприемники и схему формирования кода числа в регистре при считывании перфожетона. Из-за низкой информационной емкости и невозможности менять информацию на перфожетоне ограничиваются в целом возможности системы идентификации объектов, снижается надежность сбора информации и управления. Известна система идентификации объектов (см. каталог ф. SIEMENS, MOBY-I, Identification System, Германия, 1994 г. , стр.1.1;1.4;1.5 ) взятая авторами за прототип. Данная система содержит стационарное и подвижное устройства, которые при определенной ориентации друг относительно друга могут активизироваться и осуществлять обмен информацией между собой. Стационарное устройство содержит микроконтроллер, конвертер, модулятор и демодулятор сигнала информации, передатчик и приемник колебаний несущей радиочастоты, модулируемой сигналом информации, передатчик энергии радиоволн и приемопередающие антенны, подвижное устройство содержит микроконтроллер, передатчик и приемник колебаний несущей радиочастоты, модулируемой сигналом информации, приемо-передающие антенны, детектор сигнала принимаемой информации, приемник энергии радиоволн и химический источник питания. Наличие передатчиков и приемников колебаний несущей радиочастоты, конвертера, модулятора и демодулятора усложняет схему и снижает ее помехозащищенность, а также надежность работы системы идентификации в целом, приводит к удорожанию изделий системы.
Технической задачей, решаемой данным изобретением, является упрощение схемы, повышение надежности работы системы идентификации и снижение себестоимости изделий системы.
Вышеуказанный технический результат достигается тем, что в системе идентификации объектов, содержащей стационарное устройство, включающее последовательно соединенные микроконтроллер и передатчик энергии радиоволн, и подвижное устройство, включающее последовательно соединенные приемник энергии радиоволн и микроконтроллер, стационарное устройство снабжено излучателем света, подключенным ко второму выходу микроконтроллера через импульсный усилитель тока, фотоприемником, подключенным ко входу микроконтроллера через импульсный усилитель-ограничитель напряжения, и блоком индикаторов, подключенным к третьему выходу микроконтроллера, а подвижное устройство снабжено фотоприемником, подключенным к входу микроконтроллера через импульсный усилитель- ограничитель напряжения, и излучателем света, подключенным к выходу микроконтроллера через импульсный усилитель тока.
Сопоставительный анализ с прототипом показывает, что заявляемое техническое решение отличается тем, что стационарное устройство снабжено излучателем света, подключенным ко второму выходу микроконтроллера через импульсный усилитель тока, фотоприемником, подключенным ко входу микроконтроллера через импульсный усилитель-ограничитель напряжения, и блоком индикаторов, подключенным к третьему выходу микроконтроллера, а подвижное устройство снабжено фотоприемником, подключенным к входу микроконтроллера через импульсный усилитель-ограничитель напряжения, и излучателем света, подключенным к выходу микроконтроллера через импульсный усилитель тока.
Сравнение заявляемого технического решения не только с прототипом, но и с другими техническими решениями в данной области техники, не позволило выявить в них данной совокупности признаков. Лишь вышеуказанная совокупность признаков позволяет достигнуть необходимый технико-экономический результат, а именно упрощение схемы, повышение надежности работы системы идентификации объектов и снижение себестоимости изделий системы.
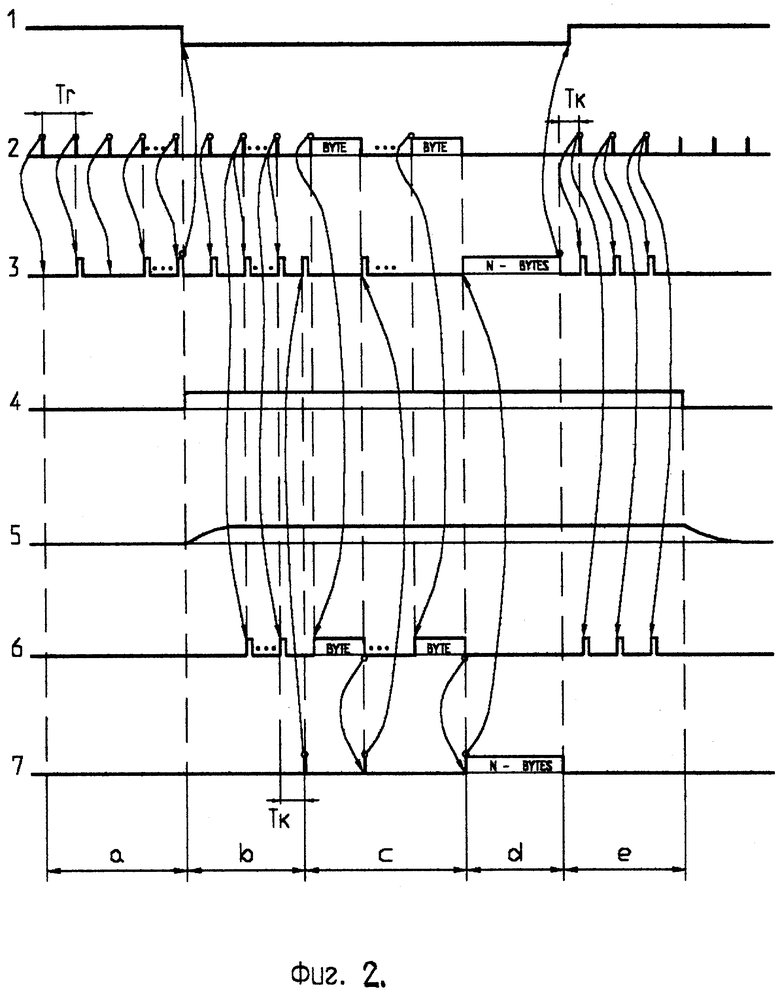
На фиг. 1 представлена функциональная схема системы идентификации объектов; на фиг. 2 - диаграммы сигналов, поясняющие работу системы идентификации объектов.
Система идентификации объектов содержит стационарное и подвижное устройства. Стационарное устройство содержит микроконтроллер 1, передатчик энергии радиоволн, включающий последовательно соединенные генератор 2 радиочастоты, усилитель 3 мощности и антенну 4, оптоканал выхода, включающий последовательно соединенные импульсный усилитель 5 тока и излучатель 6 света, оптоканал входа, включающий последовательно соединенные фотоприемник 7 и импульсный усилитель- ограничитель 8 напряжения, и блок 9 индикаторов. При этом микроконтроллер 1 содержит элементы ЦП, ОЗУ, ПЗУ и последовательного приемопередатчика. Первый выход микроконтроллера 1 подключен к генератору 2 радиочастоты, второй выход - к импульсному усилителю 5 тока, третий выход - к блоку 9 индикаторов, а вход - к импульсному усилителю-ограничителю 8 напряжения. Подвижное устройство содержит микроконтроллер 10, оптоканал выхода, включающий последовательно соединенные усилитель 11 тока и излучатель 12 света, оптоканал входа, включающий последовательно соединенные фотоприемник 13 и импульсный усилитель-ограничитель 14 напряжения, приемник энергии радиоволн, включающий последовательно соединенные антенну 15, выпрямитель 16 и стабилизатор 17 напряжения. При этом микроконтроллер 10 содержит элементы ЦП, ОЗУ, ПЗУ и энергонезависимой памяти данных. Выход микроконтроллера 10 подключен к импульсному усилителю 11 тока, вход - к импульсному усилителю-ограничителю 14 напряжения. Выход стабилизатора 17 напряжения подключен к цепям питания микроконтроллера 10, импульсного усилителя-ограничителя 14 напряжения и импульсного усилителя 11 тока.
В программном обеспечении микроконтроллера 1 содержится драйвер связи его с ЭВМ верхнего уровня, обеспечивающий возможность передачи и приема блоков информации по запросам верхнего уровня на фоне основной задачи стационарного устройства. В программном обеспечении микроконтроллеров 1 и 10 содержатся драйверы связи между ними по оптоканалам входа и выхода, обеспечивающие двусторонний обмен блоками информации. При инициализации системы идентификации объектов ЭВМ верхнего уровня посылает команду настройки стационарного устройства на один из двух режимов работы с подвижным устройством. В первом режиме разрешается только чтение информации с подвижного устройства, когда оно перемещается в рабочей зоне стационарного устройства. Во втором режиме разрешается запись и/или чтение информации с подвижного устройства, когда оно неподвижно и находится в рабочей зоне стационарного устройства. Кроме того, в команде настройки для вышеуказанных режимов задаются параметры блока информации (размер и адрес), с которыми в дальнейшем будет работать стационарное устройство, сокращая время на обмен информацией в системе идентификации объектов.
Система идентификации работает следующим образом.
В исходном состоянии микроконтроллер 1 активизирует каналы оптической связи стационарного устройства с целью обнаружения момента появления подвижного устройства в рабочей зоне. Для этого микроконтроллер 1 на втором выходе генерирует с интервалом времени Тr импульсы, которые поступают через импульсный усилитель 5 тока на излучатель 6 света, имеющего широкую диаграмму направленности излучения (см. фиг. 2 (2,a)), а на входе анализирует сигнал, поступающий от фотоприемника 7 через импульсный усилитель-ограничитель 8 напряжения (см. фиг. 2 (3,a)). При появлении отраженного света от поверхности подвижного устройства, когда оно появляется в рабочей зоне стационарного устройства, микроконтроллер 1 программно отфильтровывает краевой "дребезг" сигнала, затем снимает готовность связи с ЭВМ верхнего уровня и включает через свой первый выход передатчик энергии радиоволн (см. фиг. 2(1 и 4, a)). Приемник энергии радиоволн подвижного устройства в рабочей зоне стационарного устройства преобразует энергию радиоволн, излучаемую антенной 4, в стабилизированное напряжение питания микроконтроллера 10 и элементов схемы оптоканалов входа и выхода. Параметры передатчика и приемника энергии радиоволн выбираются из условия оптимальных линейных размеров стационарного и подвижного устройств и требуемого расстояния взаимодействия между ними.
С момента включения передатчика энергии радиоволн микроконтроллер 1, продолжая генерировать импульсы на излучатель 6 света, проверяет на своем входе, есть ли сигнал ответа от микроконтроллера 10 в виде импульса квитирования о готовности подвижного устройства к сеансу связи. А микроконтроллер 10, получив напряжение питания (см. фиг. 2 (5,b)), активизирует свой вход, связанный с оптоканалом входа, в переходном режиме с неустойчивой связью между устройствами программно отфильтровывает "дребезг" (см. фиг. 2 (6,b)), затем по оптоканалу выхода генерирует импульс квитирования (см. фиг. 2 (7, b)), смещенный по отношению к последнему входному импульсу на время Тk. При этом время Тk может удовлетворять условию:
0,5Тr<Тk<Тr,
где Тr - интервал времени между импульсами, генерируемыми на выходе микроконтроллера 1 с целью обнаружения подвижного устройства в рабочей зоне;
Тk - смещение импульса квитирования, генерируемого на выходе микроконтроллера 10 с целью сообщения о готовности подвижного устройства к сеансу связи, относительно последнего импульса на входе.
Микроконтроллер 1, получив на своем входе импульс квитирования от микроконтроллера 10, передает через второй выход блок информации в виде последовательности байтов, согласно характеристикам асинхронного режима обмена информацией по последовательному каналу (см. фиг. 2 (2,с)). После приема каждого байта микроконтроллер 10 генерирует на своем выходе один импульс квитирования (см. фиг. 2 (3 и 7,с)). При этом (в случае настройки стационарного устройства на любой из двух режимов работы) микроконтроллер 1 передает только параметры блока информации с признаками чтения его из энергонезависимой памяти данных микроконтроллера 10. Для записи информации в подвижное устройство (в случае настройки стационарного устройства на второй режим работы) микроконтроллер 1 после передачи соответствующих параметров передает информацию для записи ее в энергонезависимую память данных микроконтроллера 10. Микроконтроллер 10, распознав признак чтения, в свою очередь передает заказанный блок информации из энергонезависимой памяти данных в микроконтроллер 1, а распознав признак записи, после процедуры записи передает в микроконтроллер 1 контрольную сумму записанного блока информации (см. фиг. 2 (3 и 7,d).При этом информация с выхода микроконтроллера 10 передается в виде последовательности байтов согласно характеристикам асинхронного режима обмена информацией по последовательному каналу. Микроконтроллер 1, приняв блок информации при чтении или контрольную сумму при записи, анализирует ошибки, если они есть, через время Тk устанавливает готовность связи с ЭВМ верхнего уровня и на своем втором выходе генерирует с интервалом Тr импульсы с целью обнаружения момента выхода подвижного устройства из рабочей зоны (см. фиг. 2 (2 и 3,e)). При исчезновении отраженного света от поверхности подвижного устройства, микроконтроллер 1 через первый выход отключает передатчик энергии радиоволн (см. фиг. 2 (4,e)).
Блок индикаторов 9 отображает процесс работы системы идентификации объектов, а именно исправность работы стационарного устройства, процедуру его связи с ЭВМ верхнего уровня, процедуру его связи с подвижным устройством и возникающие ошибки в процессе работы. Ошибки, если они возникают, кодируются микроконтроллером 1 и передаются в ЭВМ верхнего уровня, а в блоке 9 индикаторов через третий выход микроконтроллера 1 включается индикатор ошибки и остается в этом состоянии до новой попытки со стороны ЭВМ верхнего уровня связаться с подвижным устройством (в случае настройки стационарного устройства на второй режим работы) либо до момента поступления в рабочую зону следующего подвижного устройства (в случае настройки стационарного устройства на первый режим работы).
| название | год | авторы | номер документа |
|---|---|---|---|
| ОПТИЧЕСКАЯ СИСТЕМА СВЯЗИ | 1999 |
|
RU2174287C2 |
| ОПТИЧЕСКАЯ СИСТЕМА СВЯЗИ | 1995 |
|
RU2121229C1 |
| БОРТОВОЙ ОБНАРУЖИТЕЛЬ С КОМПЕНСАЦИЕЙ ВАРИАЦИЙ МАГНИТНЫХ ПОЛЕЙ | 2019 |
|
RU2710363C1 |
| ПЕРЕДВИЖНАЯ ИЗМЕРИТЕЛЬНАЯ ЛАБОРАТОРИЯ | 2002 |
|
RU2212644C1 |
| СИСТЕМА БЕСПРОВОДНОЙ АТМОСФЕРНОЙ ОПТИЧЕСКОЙ СВЯЗИ НА ОБЪЕКТАХ С ВЫСОКИМ УРОВНЕМ ЭЛЕКТРОМАГНИТНЫХ ПОМЕХ | 2011 |
|
RU2483445C1 |
| Оптоэлектронный измеритель координат воздушных целей | 2018 |
|
RU2674563C1 |
| Система беспроводной оптической связи вне прямой видимости в инфракрасном диапазоне длин волн | 2023 |
|
RU2828476C1 |
| СПОСОБ ПОИСКА ОБЪЕКТОВ ИСКУССТВЕННОГО ПРОИСХОЖДЕНИЯ В ЗЕМЛЕ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2390801C1 |
| СПОСОБ ОБНАРУЖЕНИЯ И ИДЕНТИФИКАЦИИ СКРЫТЫХ ВЕЩЕСТВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2005 |
|
RU2286561C1 |
| АВТОМАТИЗИРОВАННАЯ СИСТЕМА НЕПРЕРЫВНОГО КОНТРОЛЯ СОСТОЯНИЯ ОБЪЕКТА, СОДЕРЖАЩЕГО ГЕРМЕТИЧНЫЕ КОНТЕЙНЕРЫ С ВЫСОКОТОКСИЧНЫМИ РАДИОАКТИВНЫМИ МАТЕРИАЛАМИ | 2021 |
|
RU2757867C1 |
Изобретение относится к автоматике и вычислительной технике и может быть использовано в автоматизированных системах сбора информации и управления, например в системах идентификации объектов для их автоматического адресования. Техническим результатом изобретения является упрощение схемы, повышение надежности работы и снижение себестоимости изделий системы. Система содержит стационарное и подвижное устройства. Стационарное устройство включает микроконтроллер, блок индикаторов, оптоканалы входа и выхода и передатчик энергии радиоволн. Подвижное устройство включает микроконтроллер, оптоканалы входа и выхода и приемник энергии радиоволн. В программном обеспечении микроконтроллера содержится драйвер связи его с ЭВМ верхнего уровня. В программном обеспечении микроконтроллеров содержатся драйверы связи между собой по оптоканалам входа и выхода, обеспечивающие двусторонний обмен блоками информации. Стационарное устройство может работать в двух режимах. В первом режиме разрешается только чтение информации с подвижного устройства, когда оно перемещается в рабочей зоне стационарного устройства. Во втором режиме разрешается запись и/или чтение информации с подвижного устройства, когда оно неподвижно и находится в рабочей зоне стационарного устройства. 2 ил.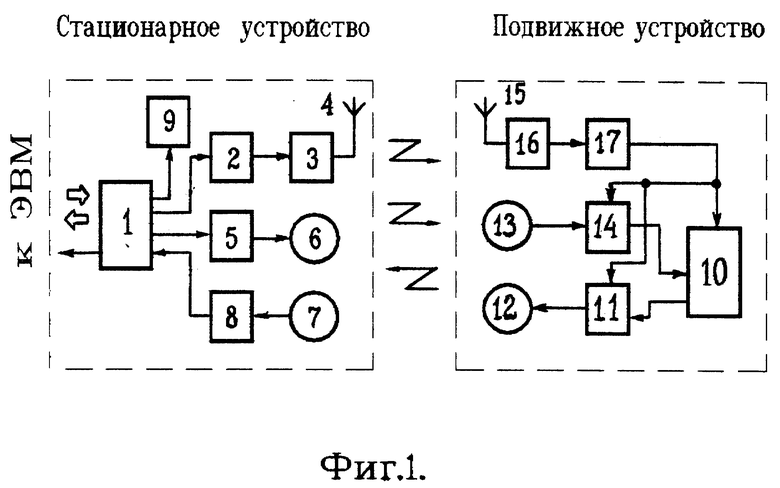
Система идентификации объектов, содержащая стационарное устройство, включающее последовательно соединенные микроконтроллер и передатчик энергии радиоволн, и подвижное устройство, включающее последовательно соединенные приемник энергии радиоволн и микроконтроллер, отличающаяся тем, что стационарное устройство снабжено излучателем света, подключенным ко второму выходу микроконтроллера через импульсный усилитель тока, фотоприемником, подключенным ко входу микроконтроллера через импульсный усилитель-ограничитель напряжения, и блоком индикаторов, подключенным к третьему выходу микроконтроллера, а подвижное устройство снабжено фотоприемником, подключенным к входу микроконтроллера через импульсный усилитель-ограничитель напряжения, и излучателем света, подключенным к выходу микроконтроллера через импульсный усилитель тока.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство для считывания информации | 1985 |
|
SU1305734A1 |
| Бесколесный шариковый ход для железнодорожных вагонов | 1917 |
|
SU97A1 |
| СПОСОБ ИМПЛАНТАЦИИ ИСКУССТВЕННОЙ ИРИДОХРУСТАЛИКОВОЙ ДИАФРАГМЫ ПРИ АНИРИДИИ И АФАКИИ, ОСЛОЖНЕННОЙ ОТСУТСТВИЕМ КАПСУЛЫ ХРУСТАЛИКА | 2002 |
|
RU2219881C1 |
| US 4230265 А, 28.10.80 | |||
| УСТРОЙСТВО ДЛЯ ДИСТАНЦИОННОЙ ДИАГНОСТИКИ ДВИЖУЩИХСЯ ОБЪЕКТОВ | 1990 |
|
RU2017216C1 |
