Изобретение относится к локационным системам, использующим электромагнитные волны, иные чем радиоволны, конкретно к оптоэлектронным измерителям координат воздушных целей и может быть использовано в бортовых и наземных локационных системах.
Известен оптоэлектронный измеритель координат воздушных целей /патент US 4383663/ с возможностью работы на частотах от ультрафиолетового до инфракрасного диапазона электромагнитных волн, содержащий оптоэлектронную оптическую систему с механическим сканированием лучом, соединенную через приемо-передающее устройство с цифровым измерителем координат воздушной цели.
Недостатком известного оптоэлектронного измерителя являются увеличенные массогабаритные характеристики, связанные с необходимостью механического или электронного сканирования приемо-передающим лучом.
Желательно уменьшить массогабаритные характеристики известного оптоэлектронного измерителя за счет исключения необходимости сканирования приемо-передающим лучом.
В известном уровне техники таких оптоэлектронных измерителей координат воздушных целей не выявлено.
Задачей изобретения является снижение массогабаритных характеристик и повышение надежности работы оптоэлектронных измерителей координат воздушных целей.
Техническим результатом, обеспечивающим решение этой задачи, является разработка неизвестного ранее оптоэлектронного обнаружителя без элементов сканирования приемо-передающим лучом.
Сущность изобретения.
Решение поставленной задачи и достижение заявленного технического результата обеспечивается тем, что оптоэлектронный измеритель координат воздушных целей содержит корпус. Внутри корпуса под светопрозрачным обтекателем установлен приемо-излучающий объектив. Объектив содержит блок импульсных источников подсветки цели и приемную оптическую систему. Оптическая система включает последовательно установленные собирающую линзу, узкополосный оптический фильтр, и решетку фотоприемников. Фотоприемники расположены перед фокальной плоскостью собирающей линзы. Выходы фотоприемников через усилители и пиковые детекторы соединены с входами аналого-цифрового преобразователя (АЦП) и компаратора, соединенных по выходу с сигнальными входами электронно-вычислительной машины (ЭВМ). Управляющий выход ЭВМ по управлению длительностью и периодом следования импульсов излучения соединен с входами блока импульсных источников подсветки цели. Выход ЭВМ по текущему угловому положению цели в азимутальной (и угломестной (плоскостях, относительным угловым скоростям  ,
,  в соответствующих плоскостях, а также по текущей дальности L до цели соединен с выходной шиной оптоэлектронного измерителя (ОЭИ) координат воздушных целей.
в соответствующих плоскостях, а также по текущей дальности L до цели соединен с выходной шиной оптоэлектронного измерителя (ОЭИ) координат воздушных целей.
Такое конструктивное выполнение оптоэлектронного измерителя координат воздушных целей, связанное с расположением фотоприемников перед фокальной плоскостью собирающей линзы и управлением ЭВМ длительностью и периодом следования импульсов импульсных источников подсветки цели синхронно с принимаемыми сигналами позволяет обнаруживать воздушные цели и измерять их координаты без углового сканирования оптоэлектронным лучом. Исключение громоздких средств электромеханического сканирования позволяет резко снизить массогабаритные характеристики оптоэлектронного измерителя (ОЭИ) и повысить надежность работы ОЭИ. Этим обеспечивается решение поставленной задачи изобретения и достижение заявленного технического результата.
Сущность изобретения поясняется рисунками, представленными на фиг.1 – фиг.5.
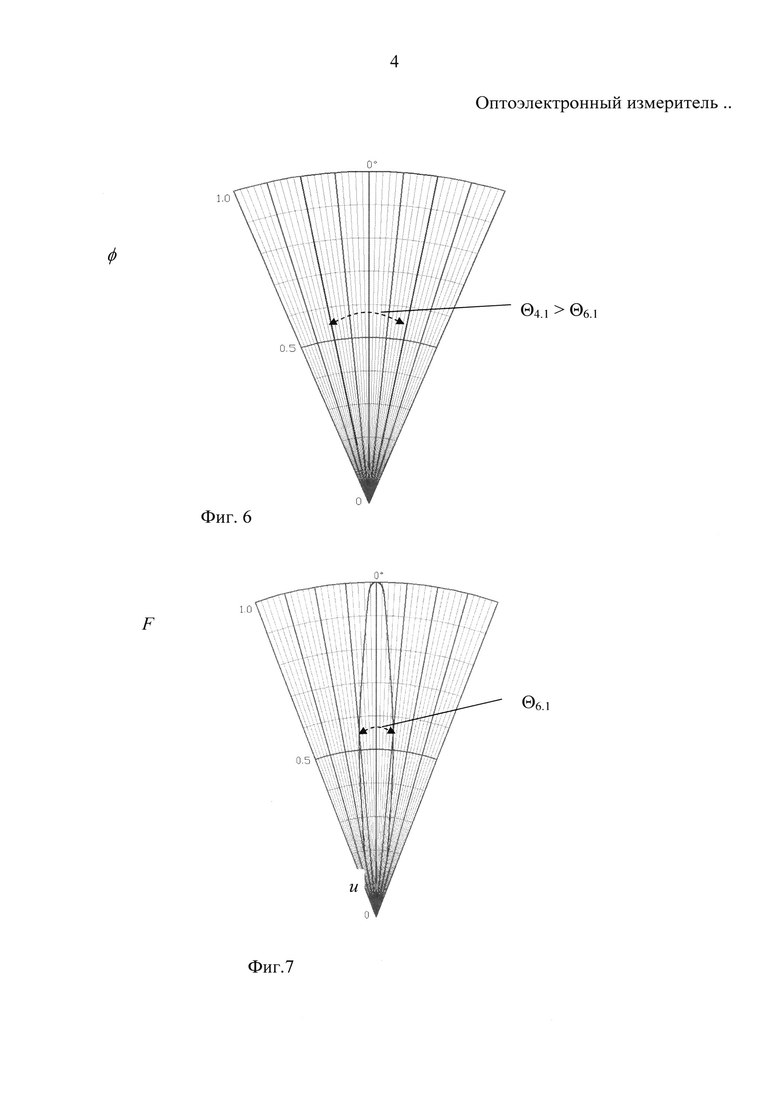
На фигуре 1 представлен рисунок, поясняющий конструкцию бортового оптоэлектронного измерителя координат воздушных целей, на фигуре 2 – функциональная схема оптоэлектронного измерителя координат воздушных целей, на фигуре 3 – рисунок, поясняющий конструкцию приемоизлучающего объектива, на фигуре 4 – вид А приемоизлучающего объектива, на фигуре 5 – функциональная схема электронно-вычислительной машины управления зондирующими сигналами, обработки ответных сигналов и измерения координат цели, на фиг.6 - нормированная диаграмма плотности мощности импульсного источника 4.1, на фиг.7 - нормированная диаграмма чувствительности фотоприемника 6.1 решетки.
На фиг.1 - фиг.7 обозначены:
1 – корпус бортового оптоэлектронного измерителя (ОЭИ) координат воздушных целей;
2 – светопрозрачный колпак;
3 - приемо-излучающий объектив;
4 - блок импульсных источников подсветки цели;
4.1 - источник подсветки цели (излучатель блока 4);
5 - приемная оптическая система;
5.1 - собирающая линза системы 5;
5.2 - узкополосный оптический фильтр системы 5;
5.3 - фокальная плоскость собирающей линзы 5.1;
6 - решетка фотоприемников;
6.1 – фотоприемники решетки 6;
7 – усилитель;
8 - пиковый детектор;
9 - аналого-цифровой преобразователь (АЦП);
10 – компаратор;
11 – электронно-вычислительная машина (ЭВМ) управления и обработки сигналов;
11.1 - вводное устройство ЭВМ;
11.2 - выводное устройство ЭВМ;
11.3 – процессор;
11.4 - оперативное запоминающее устройство (ОЗУ);
11.5 - перепрограммируемое запоминающее устройство (ППЗУ);
11.6 - цифровой дальномер;
11.7 - цифровой измеритель угловых положений цели;
11.8 – двунаправленная активная плата сопряжения ЭВМ;
11.9 – формирователь зондирующих импульсов;
12- выходная шина ОЭИ.
Оптоэлектронный измеритель координат воздушных целей содержит корпус 1. Внутри корпуса 1 под светопрозрачным обтекателем 2 установлен приемо-излучающий объектив 3. Объектив 3 содержит блок 4 импульсных источников 4.1 подсветки цели и приемную оптическую систему 5. Система 5 включает последовательно установленные собирающую линзу 5.1, узкополосный оптический фильтр 5.2, и решетку 6 фотоприемников 6.1. Фотоприемники 6.1 расположены перед фокальной плоскостью 5.3 собирающей линзы 5.1. Выходы фотоприемников 6.1 через усилители 7 и пиковые детекторы 8 соединены с входами аналого-цифрового преобразователя (АЦП) 9 и компаратора 10, соединенных по выходу с сигнальными входами электронно-вычислительной машины (ЭВМ) 11. Формирователь 11.9 зондирующих импульсов ЭВМ 11 соединен с входами блока 4 импульсных источников 4.1 подсветки цели. Выход ЭВМ 11 по текущему угловому положению цели в азимутальной α и угломестной β, плоскостях, относительным угловым скоростям , в соответствующих плоскостях, а также по текущей дальности L до цели соединен с выходной шиной 12 оптоэлектронного измерителя (ОЭИ) координат воздушных целей. При этом блок 4 импульсных источников содержит не менее одного импульсного источника 4.1 подсветки цели, а ее решетка 6 – не менее трех фотоприемников 6.1. Угловой размер Θ4.1 нормированной диаграммы углового распределения плотности мощности F излучения импульсных источников 4.1 подсветки представлен на фиг.6, а угловой размер Θ6.1 нормированной диаграммы углового распределения чувствительности U фотоприемников 6.1 – на фиг 7. Источники 4.1 выполнены расколлимированными, то есть имеют расширенную диаграмму направленности, при этом Θ4.1 ≥ Θ6.1.
Для увеличения скорости измерений и уменьшения массогабаритных параметров бортовая ЭВМ 11 управления и обработки сигналов выполнена по безоболочной схеме в виде спецвычислителя с распараллеливанием вычислительных функций (фиг.5). Согласно фиг.5 она содержит двунаправленную активную плату 11.8 сопряжения, на которой установлены процессор 11.3, оперативное запоминающее устройство (ОЗУ) 11.4, перепрограммируемое запоминающее устройство (ППЗУ) 11.5 с программой управления элементами ОЭИ, цифровой дальномер 11.6, цифровой измеритель 11.7 угловых положений цели относительно оси ОЭИ, вводное устройство 11.1 для соединения с элементами ОЭИ и выводное устройство 11.2 - с выходной шиной 12 ОЭИ.
Оптоэлектронный измеритель координат воздушных целей работает следующим образом.
По заданной программе управления измерением координат воздушных объектов, заложенной в память ППЗУ 11.5 процессор 11.3 с заданным периодом обновления передает на формирователь 11.9 требуемые параметры зондирующих импульсов. Формирователь 11.9 генерирует модулирующие импульсы амплитудой Uи, длительностью τи и периодом следования Ти. Далее указанные импульсы подаются на излучатели 4.1 блока 4 импульсных источников 4.1 подсветки цели. Под действием этих импульсов излучатели 4.1. блока 4 излучают электромагнитные волны в заданном диапазоне электромагнитных волн (ЭМВ). Далее эти ЭМВ через формирующий объектив 3 излучаются в пространство с заданным угловым размером обзора воздушного пространства. При встрече с воздушной целью зондирующие ЭМВ отражаются от воздушной цели в виде отраженных «эхо-сигналов». Эхо-сигналы принимаются приемной оптической системой 5. Принятые сигналы проходят через собирающую линзу 5.1, узкополосный фильтр 5.2 и попадают на фотоприемники 6.1 решетки 6 в расфокусированном виде. Из-за того, что решетка 6 фотоприемников 6.1 расположена перед фокальной плоскостью 5.3 создается возможность распределения мощности принятых сигналов на решетке 6 фотоприемников 6.1 как функции углового положения воздушной цели относительно оси приемно-излучающего объектива 3. Далее принятое распределение плотности мощности сигналов на решетке 6 фотоприемников 6.1 усиливается усилителями 7, детектируется пиковыми детекторами 8, и в виде аналоговых сигналов поступает на АЦП 9 и на компаратор 10. АЦП 9 преобразует поступившие от пиковых детекторов 8 аналоговые сигналы в цифровую форму. Одновременно компаратор 10 суммирует поступившие от пиковых детекторов 8 аналоговые сигналы и преобразует результаты суммирования в цифровую форму и для точного измерения дальности фиксирует момент приема отраженного эхосигнала.
Результаты обработки эхосигналов в АЦП 9 и компараторе 10 подаются далее через вводное устройство 11.1 и плату 1.8 на процессор 11.3, на цифровой дальномер 11.6, цифровой измеритель 11.7 угловых положений цели и на формирователь 11.9 зондирующих импульсов.
Формирователь 11.9 под управлением процессора 1.3 измеряет параметры принятого эхосигнала проводит их оптимальную обработку и генерирует соответствующие квазиоптимальные зондирующие импульсы длительностью τopt и периодом Тopt их следования. Эти импульсы с формирователя 11.9 передаются на блок 4 импульсных источников 4.1 для излучения очередных зондирующих ЭМВ.
Одновременно цифровой дальномер 11.6 измеряет текущую дальность L до цели в соответствии с выражением:
 (1)
(1)
где:
τ – временная разница между моментами выдачи сигналов зондирования с блока 11.9 на блок 4 излучателей 4.1 и моментом прихода ответных от цели эхо-сигналов с компаратора 10 на ЭВМ 11;
 – фиксированная задержка, учитывающая время формирования излучаемого фронта зондирующего сигнала и шумовой сдвиг срабатывания пикового детектора 8 от пришедшего эхо-сигнала;
– фиксированная задержка, учитывающая время формирования излучаемого фронта зондирующего сигнала и шумовой сдвиг срабатывания пикового детектора 8 от пришедшего эхо-сигнала;
с – скорость света (3*108 м/с).
Одновременно с измерением дальности L до цели цифровой измеритель 11.7 углов α, β измеряет  =f(φ) - уровень j-го принятого эхо-сигнала от каждого i-го фотоприемника 6.1 решетки 6 фотоприемников 6.1.
=f(φ) - уровень j-го принятого эхо-сигнала от каждого i-го фотоприемника 6.1 решетки 6 фотоприемников 6.1.
Измеренные уровни сигнала накапливаются и усредняются в измерителе 11.7 по времени по следующей формуле:
 , (2)
, (2)
где:
N - число импульсов для осреднения в зависимости от режима может изменяться от 10 (1 мс) до 10000 за измерительный цикл.
При этом соотношение сигал – шум каждого приемного канала пропорционально величине  .
.
Таким образом, происходит обработка сигналов  фотоприемников 6.1 всех приемных каналов ОЭИ.
фотоприемников 6.1 всех приемных каналов ОЭИ.
Далее по разностным величинам между и опорным минимальным сигналом  , которые проецируются на ортогональные оси системы координат ОЭИ (на фигурах не показано), определяются углы места α и азимутальный угол β воздушной цели из выражений:
, которые проецируются на ортогональные оси системы координат ОЭИ (на фигурах не показано), определяются углы места α и азимутальный угол β воздушной цели из выражений:
 ;
;
 , (4)
, (4)
где:
 – коэффициент пропорциональности для угла места, получаемый при калибровке ОЭИ на стенде;
– коэффициент пропорциональности для угла места, получаемый при калибровке ОЭИ на стенде;
 – коэффициент пропорциональности для азимутального угла, получаемый при калибровке ОЭИ на стенде;
– коэффициент пропорциональности для азимутального угла, получаемый при калибровке ОЭИ на стенде;
 - геометрическое вертикальное смещение i-го приемника в решетке относительно приемника с минимальным сигналом;
- геометрическое вертикальное смещение i-го приемника в решетке относительно приемника с минимальным сигналом;
 - геометрическое горизонтальное смещение i-го приемника 6.1 в решетке 6 относительно приемника с минимальным сигналом.
- геометрическое горизонтальное смещение i-го приемника 6.1 в решетке 6 относительно приемника с минимальным сигналом.
Одновременно с измерением величин α, β, L измеряются угловые скорости и перемещения цели из выражений:
 ; (5)
; (5)
 (6)
(6)
где:
 - значения угла места на предыдущем измерительном цикле
- значения угла места на предыдущем измерительном цикле
 - значения азимутального угла предыдущем измерительном цикле
- значения азимутального угла предыдущем измерительном цикле
 - временной интервал между измерительными циклами.
- временной интервал между измерительными циклами.
n – количество фотоприемников 6.1 в решетке 6;
N – количество последовательно излученных импульсными источниками 4.1. блока 4 зондирующих импульсов за измерительный цикл.
Измеренные значения координат воздушной цели α, β, , и L далее передаются через выводное устройство 11.2 на выходную шину 12 ОЭИ.
Данное изобретение не ограничивается приведенным выше примером его осуществления.
В рамках данного описания изобретения возможны и другие варианты его конструкции.
Так, например, для усиления входного потока ЭМВ и формирования общей диаграммы направленности решетки 6 фотоприемников 6.1 в бортовом ОЭИ может использоваться, как линзовая система, простая коллимационная (без усиления входного потока), так и система из криволинейных зеркал (рефлекторная оптическая система), позволяющая увеличить дальность обнаружения и измерения координат воздушных целей ОЭИ.
ОЭИ может быть также выполнен в наземном стационарном или мобильном варианте исполнения с расширенным полем зрения. Для этого ОЭИ снабжается блоком приемно-излучающих объективов 3 с соответствующим угловым разносом их оптических осей. Для последовательного обзора воздушного пространства по азимуту и углу места наземный ОЭИ может быть снабжен соответствующим электромеханическим приводом.
Для одновременного кругового обзора воздушного пространства в верхней полусфере может быть создана конструкция ОЭИ с блоком приемно-излучающих объективов 3, распределенных по поверхности полусферы.
Для решения задачи предотвращения столкновения летательных аппаратов с воздушными объектами (ЛА, птицы, и др.) или горизонтальными (например: земная и водная поверхности и др.) и вертикальными (например: высотные постройки, опоры ЛЭП и др.) препятствиями ОЭИ может быть установлены на защищаемые летательные аппараты.
| название | год | авторы | номер документа |
|---|---|---|---|
| Активная головка самонаведения | 2018 |
|
RU2689276C1 |
| Самонаводящаяся электроракета | 2018 |
|
RU2686550C1 |
| Способ перехвата летательных аппаратов самонаводящейся электроракетой | 2018 |
|
RU2685597C1 |
| Электрический реактивный движитель | 2018 |
|
RU2689663C1 |
| Система наблюдения и противодействия беспилотным летательным аппаратам | 2020 |
|
RU2738508C1 |
| ГОЛОГРАФИЧЕСКОЕ ТЕЛЕВИЗИОННОЕ УСТРОЙСТВО | 1990 |
|
SU1813298A3 |
| Оптическая головка самонаведения | 2024 |
|
RU2836380C1 |
| Ультразвуковой способ измерения скорости течения и расхода воды в открытых водоемах | 2016 |
|
RU2664456C2 |
| Радиолокационная станция кругового обзора | 2018 |
|
RU2691129C1 |
| Способ обзорной однопозиционной трилатерационной некогерентной радиолокации воздушных целей | 2020 |
|
RU2735744C1 |
Изобретение относится к локационным системам, использующим электромагнитные волны иные, чем радиоволны, конкретно к оптоэлектронным измерителям координат воздушных целей, и может быть использовано в бортовых и наземных локационных системах. Оптоэлектронный измеритель координат воздушных целей содержит корпус 1. Внутри корпуса 1 под светопрозрачным обтекателем 2 установлен приемоизлучающий объектив 3. Объектив 3 содержит блок 4 импульсных источников 4.1 подсветки цели и приемную оптическую систему 5. Система 5 включает последовательно установленные собирающую линзу 5.1, узкополосный оптический фильтр 5.2, и решетку 6 фотоприемников 6.1. Фотоприемники 6.1 расположены перед фокальной плоскостью 5.3 собирающей линзы 5.1. Выходы фотоприемников 6.1 через усилители 7 и пиковые детекторы 8 соединены с входами АЦП 9 и компаратора 10, соединенных по выходу с сигнальными входами ЭВМ 11. Формирователь 11.9 зондирующих импульсов ЭВМ 11 соединен с входами блока 4 импульсных источников 4.1 подсветки цели. Выход ЭВМ 11 по текущему угловому положению цели в азимутальной α и угломестной β плоскостях, относительным угловым скоростям  ,
,  в соответствующих плоскостях, а также по текущей дальности L до цели соединен с выходной шиной 12 измерителя. Технический результат заключается в снижении массогабаритных характеристик и повышении надежности работы за счет исключения электромеханических элементов сканирования. 2 з.п. ф-лы, 7 ил.
в соответствующих плоскостях, а также по текущей дальности L до цели соединен с выходной шиной 12 измерителя. Технический результат заключается в снижении массогабаритных характеристик и повышении надежности работы за счет исключения электромеханических элементов сканирования. 2 з.п. ф-лы, 7 ил.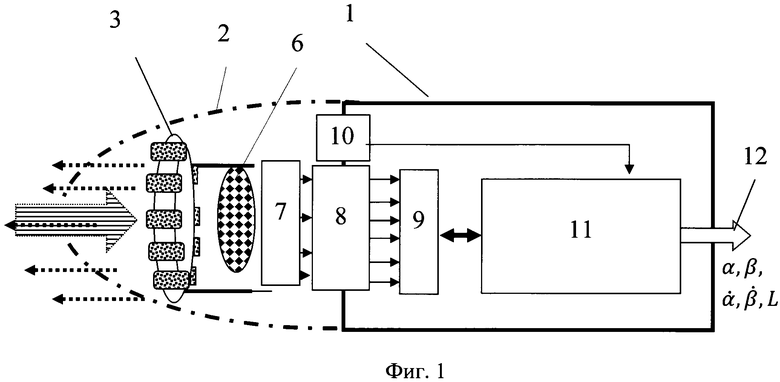
1. Оптоэлектронный измеритель координат воздушных целей, характеризующийся тем, что он содержит корпус, внутри которого под светопрозрачным колпаком установлен приемо-излучающий объектив, содержащий блок импульсных источников подсветки цели и приемную оптическую систему, включающую последовательно установленные собирающую линзу, узкополосный оптический фильтр и решетку фотоприемников, расположенных перед фокальной плоскостью собирающей линзы, выходы фотоприемников через усилители и пиковые детекторы соединены с входами аналого-цифрового преобразователя (АЦП) и компаратора, соединенных по выходу с сигнальными входами электронно-вычислительной машины (ЭВМ), управляющий выход ЭВМ по управлению длительностью и периодом следования импульсов излучения соединен с входами блока импульсных источников подсветки цели, выход ЭВМ по текущему угловому положению цели в азимутальной α и угломестной β плоскостях, относительным угловым скоростям  ,
,  в соответствующих плоскостях, а также по текущей дальности L до цели соединен с выходной шиной оптоэлектронного измерителя (ОЭИ) координат воздушных целей.
в соответствующих плоскостях, а также по текущей дальности L до цели соединен с выходной шиной оптоэлектронного измерителя (ОЭИ) координат воздушных целей.
2. Оптоэлектронный измеритель по п. 1, отличающийся тем, что блок импульсных источников содержит не менее одного импульсного источника подсветки цели, а ее решетка - не менее трех фотоприемников.
3. Оптоэлектронный измеритель по п. 1, отличающийся тем, что бортовая ЭВМ выполнена по безоболочной схеме и содержит двунаправленную активную плату сопряжения, на которой установлены процессор, оперативное запоминающее устройство (ОЗУ), перепрограммируемое запоминающее устройство (ППЗУ) с программой управления элементами ОЭИ, цифровой дальномер, цифровой измеритель угловых положений цели относительно оси ОЭИ, формирователь зондирующих импульсов, вводное устройство для соединения с элементами ОЭИ и выводное устройство - с выходной шиной ОЭИ.
| Система разработки мощных пластов в два слоя | 1947 |
|
SU75057A1 |
| US 4383663 A, 17.05.1983 | |||
| US 2005249502 A1, 10.11.2005 | |||
| US 6357694 B1, 19.03.2002. | |||

