Изобретение относится к горному делу, а именно к подземной добыче полезного ископаемого камерами или короткими забоями с помощью механизированной крепи.
Известна механизированная крепь для крутых пластов, включающая секции, гидродомкраты передвижения и межсекционные гидродомкраты связи, шарнирно закрепленные на смежных секциях. (А.с. СССР N 949196, Кл. E 21 D 23/00, 1980. Механизированная крепь для крутых пластов).
Известная крепь не может быть успешно использована для отработки пластов камерами, так как является недостаточно маневренной для передвижения из одной камеры в другую с разворотом дважды под углом 90 градусов, что требует перевод крепи из одной камеры в другую. Межсекционные гидродомкраты связи расположены в одном уровне и при развороте крепи не обеспечивают боковой устойчивости секции, наклон которых увеличивается с каждой передвижкой секций с разворотом.
Наиболее близкой к предложенной по технической сущности и достигаемому результату является механизированная крепь, содержащая секции, включающие основание, гидростойки, перекрытия, домкрат передвижения, горизонтальный и наклонный выравнивающие домкраты, соединяющие посредством шарниров основание секции соответственно с основанием и перекрытием смежной секции. (А.с. СССР N 976094, Кл. E 21 D 23/00, 1981. Механизированная крепь) - принято за прототип.
Основным недостатком известной крепи является отсутствие возможности отработки пластов камерами и разворота крепи в горизонтальной плоскости на сколь-нибудь значительный угол за одну передвижку, так как домкраты передвижения секций крепи связаны с общей базовой балкой и расположены таким образом, что не позволяют осуществить разворот крепи с отрывом одной секции крепи от другой более чем на величину зазора между домкратом передвижения и полозами основания. Другим недостатком известного решения является наклонное расположение выравнивающего домкрата, связывающего перекрытие одной секции с основанием смежной секции. При этом выравнивание бокового наклона перекрытия секции крепи возможно только в одном направлении передвижения, секций, то есть со стороны, связывающей перекрытие секции с выравнивающим домкратом. Кроме того, известная механизированная крепь имеет недостаточный диапазон раздвижности, при котором охватить вынимаемую мощность при отработке заходок с передвижением крепи по камере и откаточной выработке в соседнюю камеру является затруднительным.
Сущность изобретения заключается в том, что основание секции с задней стороны выполнено с фигурным кронштейном, имеющим верхний и внутренний рычаги и снабжено траверсой, шарнирно установленной между верхняком и верхним рычагом кронштейна основания, а траверсы снабжены дополнительным гидроцилиндром управления, связывающим между собой поверху соседние секции крепи.
Кроме того, фигурный кронштейн основания секции снабжен трехплечим рычагом и стержнем, причем трехплечий рычаг установлен между верхним рычагом фигурного кронштейна основания и траверсой, а стержень установлен между внутренним рычагом фигурного кронштейна и плечом трехплечего рычага.
Кроме того, цилиндр гидростойки со стороны, связывающей его с несущим элементом крепи, снабжен проставкой, которая одной стороной жестко связана с цилиндром, а другой шарнирно - с несущим элементом крепи.
Кроме того, боковые кромки оснований секций понизу выполнены со скосами, с возможностью поперечного передвижения секции.
Заявленное изобретение направлено на обеспечение возможности отработки пластов камерами или заходками и перевода механизированной крепи, ее транспортировку своим ходом без перемонтажа, из одной камеры в другую, что значительно снижает трудоемкость работ, потери добычи за счет времени перемонтажа крепи, а значит и себестоимость добычи полезного ископаемого. Механизированная крепь, предложенная изобретением, позволяет выполнить разворот крепи на угол 90o за несколько передвижек крепи с минимальным радиусом поворота. При развороте механизированной крепи при каждом передвижении секции производят ее установку под необходимыми углами в горизонтальной и вертикальной плоскостях, причем порядок передвижения секций не зависит от направления поворота. Боковая устойчивость секций обеспечивается при любом порядке передвижения секций, выбранном в зависимости от направления поворота. Это свойство крепь имеет за счет связей секций не только понизу, по основаниям секций, но и поверху, по траверсам, связывающим основания секций с верхняками. Кроме того, диапазон раздвижности секций механизированной крепи может быть значительно расширен путем установки различной длины рычагов между кронштейном основания и траверсой, а также за счет проставки, устанавливаемой между цилиндром гидростойки и несущим элементом крепи - верхняком или основанием. Причем для того, чтобы уменьшить вероятность деформирования штока гидростойки за счет появления в нем значительных изгибающих моментов, удлинитель гидростойки - проставка установлена не со стороны штока, а со стороны цилиндра гидростойки.
Технический результат заявляемого технического решения заключается в расширении области применения механизированной крепи при отработке пластов полезного ископаемого камерами или короткими заходками, транспортировке крепи своим ходом без перемонтажа из отработанной камеры в новую, увеличении диапазона раздвижности секций крепи, снижении вероятности деформации штока гидростойки. В результате использования нового технического решения снижаются трудоемкость работ, потери добычи полезного ископаемого и его себестоимость.
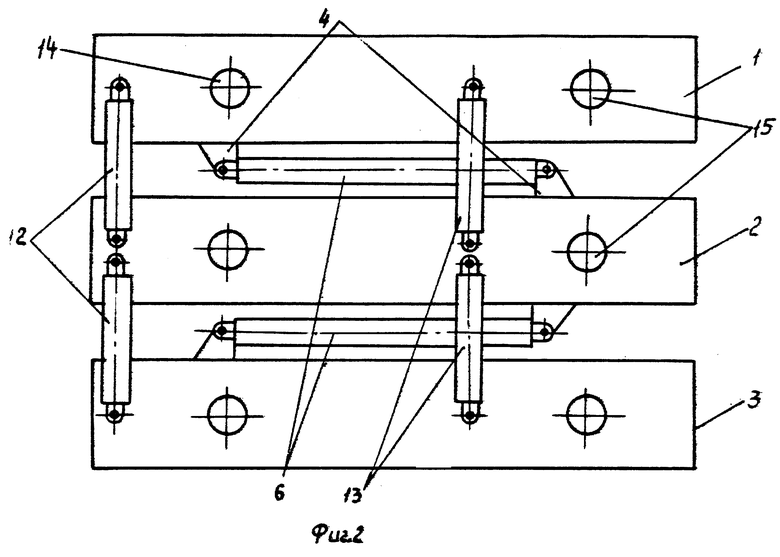
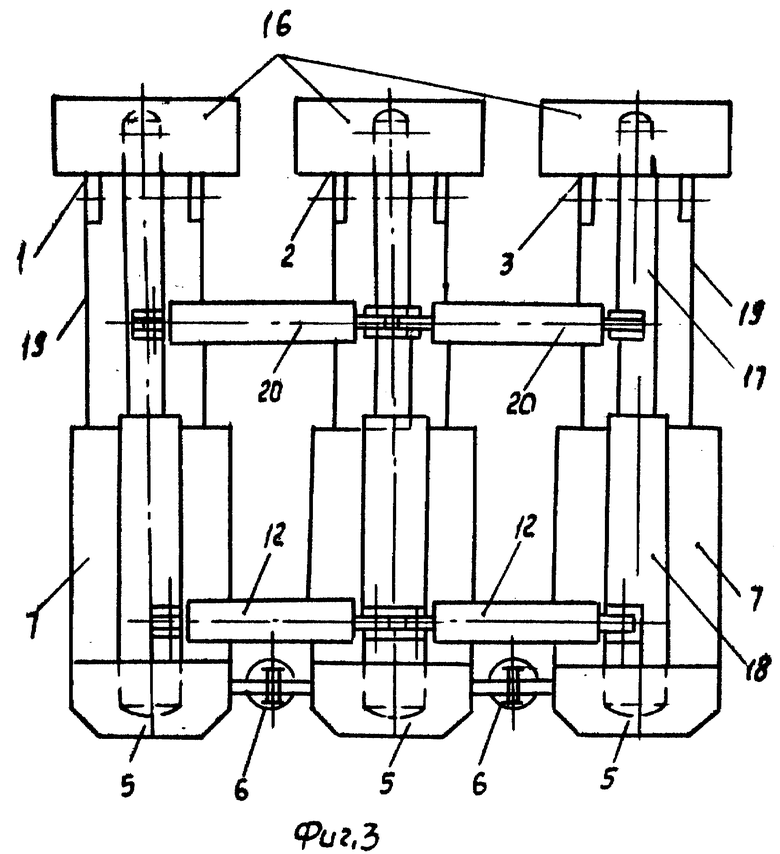
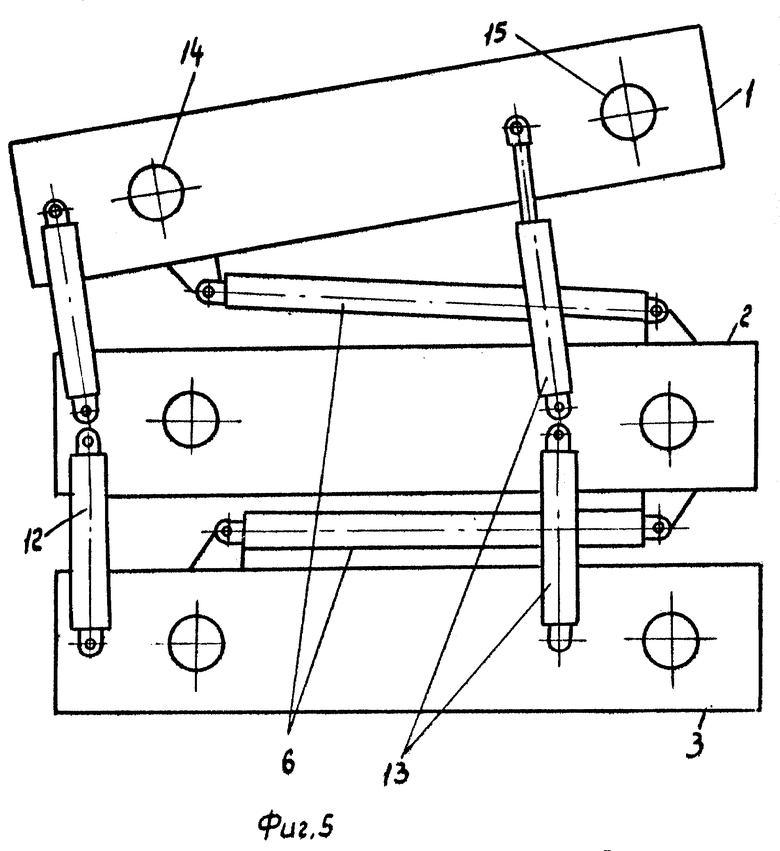
На фиг. 1 показан общий вид сбоку механизированной крепи, на фиг. 2 - то же, что на фиг. 1 - вид сверху; на фиг. 3 - то же, что на фиг. 2 - вид спереди; на фиг. 4 - вид сбоку механизированной крепи с рычагами и проставкой гидростоек; на фиг. 5 - то же, что на фиг. 2 - показано начало передвижения секции 1.
Механизированная крепь состоит их одинаковых по конструкции секций 1, 2 и 3, отличающихся друг от друга расположением упоров 4 на основаниях 5, связанных между собой шарнирно установленными между упорами оснований секций домкратами передвижения 6. Основание 5 секций крепи с боков понизу в поперечном сечении выполнено со скосами, а с задней стороны выполнено заодно целое с фигурным кронштейном 7, который имеет жестко закрепленные к нему верхний рычаг 8 с проушиной 9 и внутренний рычаг 10 с проушиной 11. Основания 5 соседних секций 1, 2 и 3 крепи также связаны между собой шарнирно установленными поперек секций передними гидроцилиндрами управления 12 и задними гидроцилиндрами управления 13. На основании 5 секции шарнирно установлены передние гидростойки 14 и задние гидростойки 15, также шарнирно связанные с верхняком 16. Передние 14 и задние 15 гидростойки состоят из штока 17 и цилиндра 18. Верхняк 16 с помощью траверсы 19 шарнирно связан с проушиной 9 верхнего рычага 8 фигурного кронштейна 7 основания 5. Траверсы 19 смежных секций 1 и 2, 2 и 3 крепи шарнирно связаны между собой дополнительным гидроцилиндром управления 20.
В случаях, когда раздвижности гидростоек 14 и 15 секций 1, 2 и 3 механизированной крепи недостаточно для надежного распора секции между почвой и кровлей выработки, гидростойки удлиняют путем установки проставки 21, которую одной стороной жестко связывают с цилиндром 18 гидростойки, а другой стороной шарнирно связывают с несущим элементом крепи, основанием 5 или верхняком 16.
При установке удлиняющих гидростойки 14 и 15 проставок 21 может возникнуть необходимость повышения раздвижности секции механизированной крепи, что выполняют путем установки трехплечего рычага 22 с проушинами 23 и 24 по концам между проушиной 9 верхнего рычага 8 фигурного кронштейна 7 и траверсой 19, и установки стержня 25 между проушиной 11 внутреннего рычага 10 и проушиной 26 трехплечего рычага.
Механизированная крепь работает следующим образом.
Для продольного передвижения механизированной крепи осуществляют разгрузку или осадку гидростоек 19 и 15 той секции крепи, с которой начинают передвижение, например, секции 3. Затем устанавливают на слив задний гидроцилиндр управления 13, а также дополнительный гидроцилиндр управления 20, расположенные между распертой секцией 2 и передвигаемой секцией крепи 3 и включают на раздвижку передний гидроцилиндр управления 12 и домкрат передвижения 6, расположенный между упорами 4 оснований 5 секций 2 и 3. При этом секция 3 передвигается вперед, а гидроцилиндры управления 12, 13, 20 раздвигаются и разворачиваются относительно горизонтальных осей секций. Если при передвижении крепи происходит сползание основания 5 передвигаемой секции, то с помощью включения заднего гидроцилиндра управления 13 производят корректировку положения основания в направлении обратном направлению сползания. В случае потери поперечной устойчивости передвигаемой секции 3 крепи, корректировку установки секции в вертикальной плоскости производят дополнительным гидроцилиндром управления 20, расположенным между траверсами 19 соседних секций, устанавливая положение верхняка 16 передвигаемой секции относительно верхняка распертой секции 2. После окончания передвижения секции 3 гидроцилиндры управления 12, 13, 20, расположенные между секциями 3 и 2, запирают, а гидростойки 14 и 15 секции 3 распирают. Далее аналогичным образом передвигают секцию 1, для чего разгружают или осаживают ее гидростойки 14 и 15, включают на раздвижку гидроцилиндры управления 12, 13 и 20 и одновременно с ними домкрат передвижения 6, расположенные между секциями 2 и 1. По мере передвижения секции 1 положение ее основания 5 корректируют гидроцилиндрами управления 12 и 13, а боковую устойчивость секции обеспечивают дополнительным гидроцилиндром управления 20. После передвижения секции 1 она займет положение аналогично ранее передвинутой секции 3, после чего ее гидростойки 14 и 15 распирают, а гидроцилиндры управления 12, 13 и 20 и домкрат передвижения 6 запирают. Последний передвигает среднюю секцию 2, гидростойки 14 и 15 которой разгружают или осаживают, гидроцилиндры управления 12, 13 и 20 ставят на слив или сокращение и домкраты передвижения 6 сокращают. В результате секция 2 подтягивается к ранее передвинутым секциям 1 и 3 и после корректировки ее положения гидроцилиндрами управления 12, 13 и 20, последние запирают. Также запирают домкраты передвижения 6 и распирают гидростойки 14 и 15 секции 2.
Крепь может передвигаться и задним ходом. При этом от исходного положения сначала выдвигается средняя секция 2 одновременным включением на раздвижку гидроцилиндров передвижки 6.
После этого передвигается любая крайняя секция 1 или 3. При этом один из гидроцилиндров передвижки 6 включается на сокращение. Управление гидроцилиндрами 12, 13, 20 осуществляется аналогично описанному ранее.
Передвижение механизированной крепи с разворотом, например, при ее перемещении из камеры на откаточный штрек, или наоборот, осуществляют с поочередным поворотом секций относительно друг друга. Причем, чем больше поперечный разворот секции на каждом шаге передвижения и чем меньше шаг передвижения, тем с меньшим радиусом поворота разворачивают механизированную крепь. Для передвижения крепи с разворотом, например, против часовой стрелки на фиг. 5 передвижку начинают с одной из крайних секций, например, секции 1. Разгружают или осаживают гидростойки 14 и 15 секции 1, включают на раздвижку задний гидроцилиндр управления 13 и дополнительный гидроцилиндр управления 20 до разворота секции крепи на некоторый, допустимый конструкцией крепи, угол поворота. Затем устанавливают на слив передний гидроцилиндр управления 12 и на раздвижку домкрат передвижения 6 между секциями 1 и 2. По мере передвижения секции 1 манипулируют, устанавливая на слив или раздвижку гидроцилиндрами управления 12, 20 и домкратом передвижения 6 для придания секции крепи боковой устойчивости и необходимой траектории передвижения. По окончании передвижения секции 1 гидростойки 14 и 15 распирают, а домкрат передвижения 6 и гидроцилиндры управления 12, 13 и 20 между секциями крепи 1 и 2 запирают. Затем передвигают секцию 3. Разгружают или осаживают гидростойки 14 и 15 секции 3, включают на раздвижку передний гидроцилиндр управления 12 и дополнительный гидроцилиндр управления 20 до разворота секции крепи на некоторый, допустимый конструкцией крепи, угол поворота. Далее устанавливают на слив задний гидроцилиндр управления 13 и на раздвижку домкрат передвижения 6 между секциями 2 и 3. Во время передвижения секции 3 манипулируют устанавливая со слива раздвижку, гидроцилиндрами управления 13, 20 и домкратом передвижения 6 для придания секции крепи устойчивости и необходимой траектории передвижения. По окончании передвижения секции 3 гидростойки 14 и 15 распирают, а домкрат передвижения 6 и гидроцилиндры управления 12, 13 и 20 между секциями крепи 2 и 3 запирают. После передвижки обоих крайних секций 1 и 2 приступают к передвижению средней секции 2, для чего гидроцилиндры корректировки 12, 13 и 20 устанавливают на слив, а домкраты передвижения 6, расположенные между секциями 1 и 2, а также 2 и 3, включают на сокращение. В процессе передвижения секции 2 гидроцилиндрами управления 12, 13 и 20 корректируют положение и боковую устойчивость передвигаемой секции. По окончании передвижения секции 2 гидростойки 14 и 15 распирают, а домкраты передвижения 6 и гидроцилиндры управления 12, 13 и 20 запирают.
Разворот секций можно производить без их передвижки.
Для этого необходимо производить ранее описанные операции без включения гидроцилиндров передвижки на раздвижку.
Передвигать механизированную крепь возможно не только в продольном, но и в поперечном направлении. Такая необходимость может возникнуть, как при перемещении крепи в камере, так и вместо разворота крепи при ее перемещении от одной камеры к другой по откаточному штреку, если позволяет сечение выработки. Такой прием упрощает технологию перемещения крепи из одной камеры в другую, ускоряет этот процесс и снижает трудоемкость. Поперечное перемещение крепи возможно в любом направлении. Для того, чтобы уменьшить сопротивление секции крепи при передвижении в поперечном направлении, боковые кромки основания секции крепи выполнены со скосами.
Передвижение крепи в поперечном направлении, например, в сторону секции 1 начинают с сокращения гидростоек 14 и 15 этой секции до отрыва верхняка 16 от кровли выработки. Затем домкрат передвижения 6 между секциями 1 и 2 устанавливают на слив, а гидроцилиндры управления 12, 13 и 20 устанавливают на раздвижение. При этом секция 1, отталкиваясь от распертой секции 2, перемещается в поперечном направлении, а домкрат передвижения 6 между секциями 1 и 2 разворачивается в горизонтальной плоскости и раздвигается. После перемещения секции 1 в поперечном направлении, по мере необходимости, с помощью гидроцилиндров управления 12, 13, 20 можно секциями 1 и 2, корректируют ее пространственное положение, гидроцилиндры управления устанавливают на слив, а гидростойки 14 и 15 этой секции распирают. Следом перемещают секцию 2, для чего осаживают ее гидростойки 14 и 15 до отрыва верхняка 16 от кровли. Гидроцилиндры управления 12, 13 и 20 между секциями 2 и 3 устанавливают на раздвижение, домкрат передвижения 6 на слив, а секция 2, отталкиваясь от распертой секции 3, перемещается в поперечном направлении к секции 1. При этом гидроцилиндры управления 12, 13 и 20 между секциями 1 и 2 сокращаются, домкрат передвижения 6 между секциями 1 и 2 разворачивается в горизонтальной плоскости, сокращается и устанавливается вдоль секций крепи, а домкрат передвижения между секциями 2 и 3 разворачивается в горизонтальной плоскости и раздвигается. После окончания перемещения секции 2 в поперечном направлении и корректировки ее пространственного положения гидростойки 14 и 15 этой секции распирают, а гидроцилиндры управления 12, 13 и 20 и домкрат передвижения 6 между секциями 1 и 2 запирают. Последний перемещают в поперечном направлении секцию 3, для чего ее гидростойки 14 и 15 сокращают до отрыва верхняка 16 от кровли, а гидроцилиндры управления 12, 13 и 20 устанавливают на сокращение. При этом секция 3 подтягивается к распертой секции 2, домкрат передвижения 6 между секциями 2 и 3 разворачивается и устанавливается вдоль секций крепи. После корректировки пространственного положения секции 3 ее гидростойки 14 и 15 распирают, а гидроцилиндры управления 12, 13 и 20 запирают. Для дальнейшего передвижения механизированной крепи в поперечном направлении аналогичные циклы повторяют необходимое количество раз.
| название | год | авторы | номер документа |
|---|---|---|---|
| КОНЦЕВАЯ СЕКЦИЯ МЕХАНИЗИРОВАННОЙ КРЕПИ | 1991 |
|
RU2021525C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ СЕКЦИЕЙ МЕХАНИЗИРОВАННОЙ КРЕПИ | 1990 |
|
RU2018686C1 |
| СЕКЦИЯ МЕХАНИЗИРОВАННОЙ КРЕПИ | 1995 |
|
RU2078938C1 |
| МЕХАНИЗИРОВАННАЯ КРЕПЬ СОПРЯЖЕНИЯ | 1991 |
|
RU2011835C1 |
| МЕХАНИЗИРОВАННАЯ КОМПЛЕКТНАЯ БЕЗРАЗГРУЗОЧНАЯ КРЕПЬ | 1992 |
|
RU2021526C1 |
| МЕХАНИЗИРОВАННЫЙ УЗЕЛ СОПРЯЖЕНИЯ ЛАВЫ СО ШТРЕКОМ | 1992 |
|
RU2024760C1 |
| ИСКУССТВЕННЫЙ МЕХАНИЗИРОВАННЫЙ ЦЕЛИК | 1995 |
|
RU2083844C1 |
| Механизированная крепь сопряжения для пластов крутого падения | 1984 |
|
SU1198216A1 |
| СЕКЦИЯ МЕХАНИЗИРОВАННОЙ КРЕПИ | 1996 |
|
RU2134792C1 |
| МЕХАНИЗИРОВАННАЯ КРЕПЬ | 1991 |
|
RU2042825C1 |

Изобретение относится к горному делу, а именно к подземной добыче полезного ископаемого камерами или короткими забоями с помощью механизированной крепи. Технический результат заключается в расширении области применения механизированной крепи при отработке пластов полезного ископаемого камерами или короткими заходками, транспортировке крепи своим ходом без перемонтажа из отработанной камеры в новую, увеличении диапазона раздвижности секции крепи при снижении вероятности деформации штока гидростойки. Механизированная крепь содержит секции, включающие состоящие из цилиндра и штока гидростойки, шарнирно установленные между верхняком и основанием, домкраты передвижения, гидроцилиндры управления, шарнирно связывающие соседние секции крепи. Основание секции с задней стороны выполнено с фигурным кронштейном, имеющим верхний рычаг, внутренний рычаг и траверсу, шарнирно установленную между верхняком и верхним рычагом кронштейна основания. Траверсы снабжены дополнительным гидроцилиндром управления, связывающим поверху соседние секции крепи. Цилиндр каждой из гидростоек со стороны, связывающей гидростойки с основанием секции крепи, может быть снабжен проставкой. Фигурный кронштейн основания секции может быть снабжен трехплечим рычагом, установленным между верхним рычагом фигурного кронштейна и траверсой, и стержнем, установленным между внутренним рычагом и плечом с проушиной трехплечего рычага. Боковые кромки оснований понизу могут быть выполнены со скосами для обеспечения возможности передвижения крепи в поперечном направлении. 3 з.п.ф-лы, 5 ил.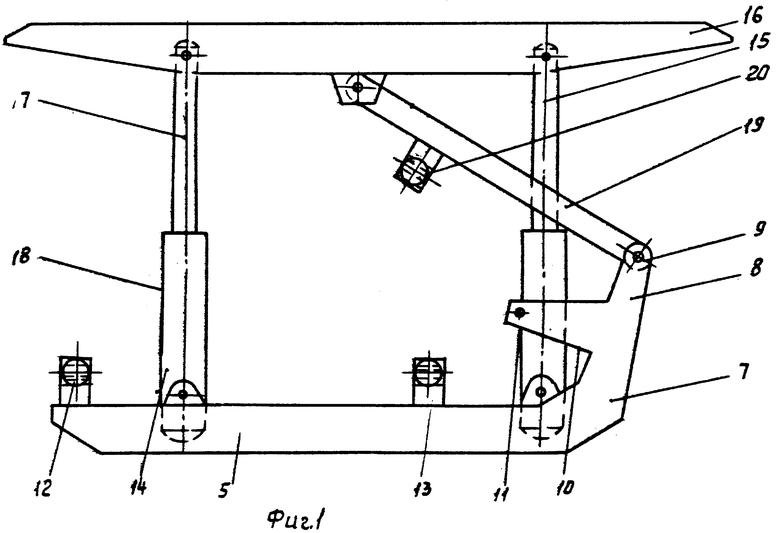
| Механизированная крепь | 1981 |
|
SU976094A1 |
| Механизированная крепь для крутых пластов | 1980 |
|
SU949196A1 |
| Механизированная крепь | 1981 |
|
SU1105655A1 |
| GB 1492586 A, 23.11.77 | |||
| GB 1600520 A, 14.10.81 | |||
| СПОСОБ ГЕОЭЛЕКТРОРАЗВЕДКИ | 1992 |
|
RU2044331C1 |
| Устройство для приема тональных сигналов | 1985 |
|
SU1254594A1 |
