Настоящее изобретение относится к машиностроению и может найти применение в соответственных рычажных узлах производственных и транспортных механизмов, стать новым типом конструкций так называемых передаточных рычажных механизмов.
Известен кулисный механизм, имеющий два звена (кривошип и кулиса), поворотно связанных с основанием и поворотно со скольжением между (см. Ю.В. Милосердин и др. Расчет и конструирование механизмов приборов и установок, - М.: Машиностроение, 1985 г., стр. 101, 109, рис. 58).
Однако он неприемлем для передачи с преобразованием линейного перемещения и силовых нагрузок между двумя частями другого механизма.
Наиболее близким к заявленному является рычажная система, содержащая два рычага, имеющих шарнирные опоры, расположенные между из концами на общем основании или платформе и контактно связанные между собой соседними концами, что позволяет ее также именовать рычажным редуктором. (см. патент Великобритании N 2255384 , F 16 H 21/46, 04.11.92).
Недостатком известного редуктора является разрывная связь между рычагами.
Техническим результатом заявленного изобретения является обеспечение неразрывной связи между рычагами и получение значительного выигрыша в силе.
В заявленном изобретении рычажный редуктор содержит по меньшей мере два рычага, имеющих шарнирные опоры, расположенные между их концами на общем основании или платформе и кинематически связанные между собой соседними концами поворотно со скольжением, как в кулисном механизме, представляет собой плоский рычажный механизмы, состоящий из нескольких рычагов, связанных последовательно между собой кулисной связью при некоторых начальных углах (β) их взаимного наклона. Причем короткое плечо каждого рычага содержит ролик и ползун с шарниром, входящий в прорезь на конце длинного плеча соседнего рычага. При этом рычаги могут быть наклонены относительно друг друга под углом, близким к π с чередованием знака угла наклона между соседними рычагами. Свободные концы крайних рычагов имеют форму, пригодную для их силового контакта с нагружающей и нагружаемой поверхностями для использования рычажного редуктора в качестве силового узла в другом механизме или имеют шарнирные концы или продольные прорези для кинематической связи с ведущим и ведомым звеньями другого механизма.
Перечень фигур:
фиг. 1 - схема отдельного рычага с шарнирной опорой между его концами;
фиг. 2 - схема рычажного редуктора с двумя рычагами;
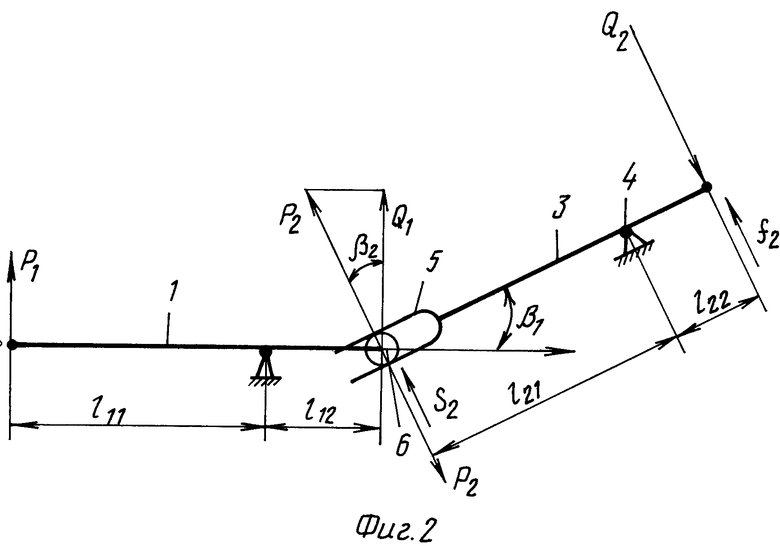
фиг. 3 - схема рычажного редуктора с тремя рычагами и углами взаимного наклона одного знака;
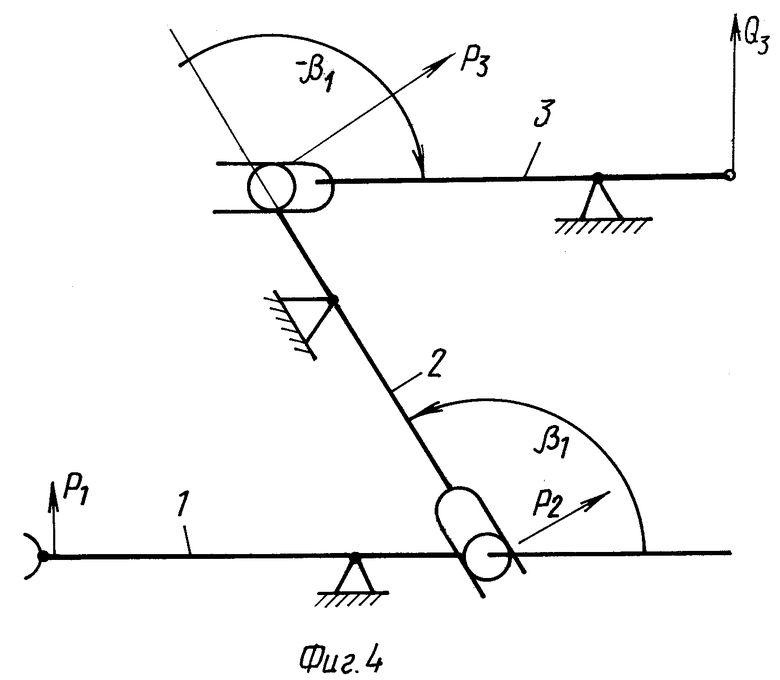
фиг. 4 - схема рычажного редуктора с тремя рычагами и углами взаимного наклона разных знаков;
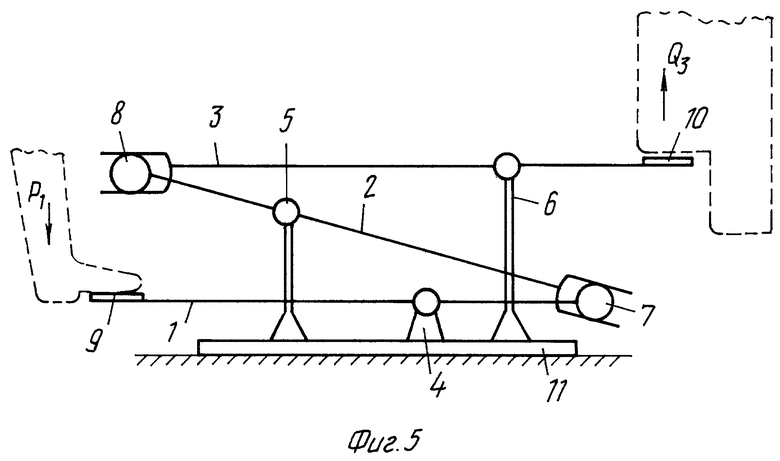
фиг. 5 - вариант конструкции рычажного редуктора с тремя рычагами для рычажного подъема груза;
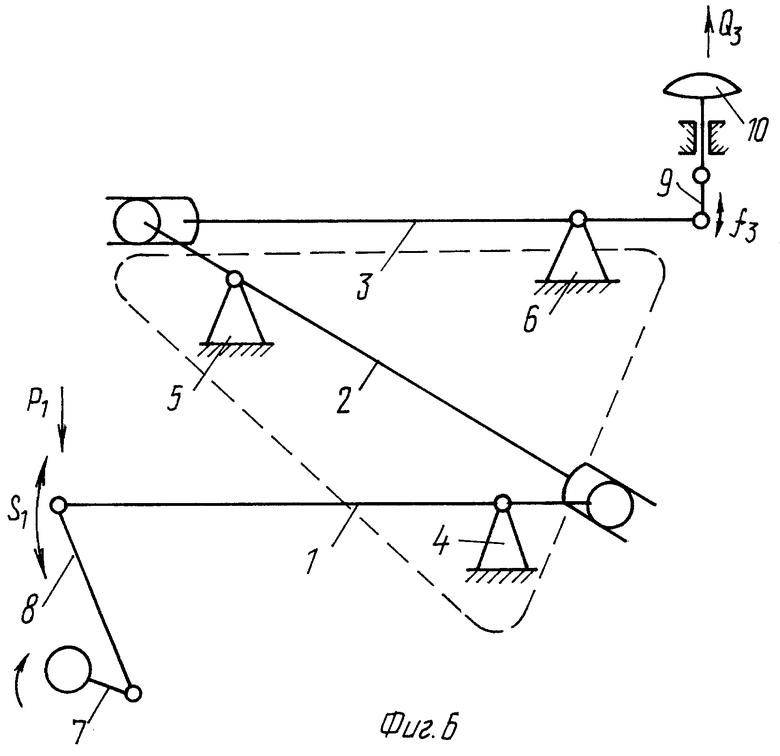
фиг. 6 - вариант рычажного редуктора с тремя рычагами для силового узла механизма.
Для оценки технической эффективности рассмотрим передаточные функции рычажного редуктора.
Обозначим для отдельного рычага на шарнирной опоре или для нескольких взаимосвязанных рычагов (см. фиг. 1, 2, 3) буквами in, kn, λn соответственно передаточное число, как отношение длин плеч ln1, ln2, отношение сил и перемещений (по модулю на входе и выходе), где
in = ln1/ln2; kn = Qn/P1; (n=1,2...) [1]
(n=1,2...) [1]
где P1 - сила на левом конце первого рычага;
Qn - сила на правом конце n -го рычага,
Pn - сила на левом плече n - го рычага,
n - порядковый номер рычага.
S1 - перемещение левого конца первого рычага,
fn - перемещение правого конца n-го рычага.
Исходя из равновесия рычагов и равенства работ в их концах имеем:
Qn/Pn = in; λn•kn = 1. [2]
Таким образом, увеличение силы сопровождается уменьшением перемещения. По схеме фиг. 2 видно, что действующие силы перпендикулярно оси рычага будут, учитывая первую формулу [2]:
P2 = Q1/cosβ1; , Q2=i2 • P2; Q1=i1 • P1, [3]
где β1 - угол между первым рычагом (продолжением его продольной оси) и вторым рычагом (его продольной осью). При этом положительным является угол, измеренный в направлении против движения часовой стрелки.
Исключая здесь сначала P2, а затем Q1, учитывая вторую формулу [1] имеем:
Q2=k2P1; 
Отсюда видно, что при увеличении угла β1 от 0 до π/2 будет увеличиваться выигрыш в силе (k2) на ведомом рычаге.
Присоединяя ко второму рычагу пол углом β2 третий рычаг (см. фиг. 4), имеем новую пару рычагов и соотношения, аналогичные [3].
 Q3=i3•P3.
Q3=i3•P3.
Исключая сначала P3, а затем Q2, согласно [5], [4], [1] имеем:
Q3 = k3 • P1; 
Формула [6] показывает, что отношение сил определяется произведением передаточных чисел всех соседних рычагов и тем самым обосновывается название механизма как рычажного редуктора.
Для отношений перемещения λ2,λ3 концевых точек рычажного редуктора после определения k2, k3, согласно [2] имеем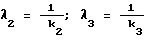
Заметим, что при условии
β1 = -β2
крайние рычаги рычажного редуктора с тремя рычагами становятся параллельными. Аналогично при чередовании знаков углов между соседними рычагами будут параллельными нечетные, по порядку номеров, рычаги при любом их числе.
Геометрически очевидно, что продольный габарит L рычажного редуктора будет мало отличаться от длины одного рычага, если при равенстве [8] угол β1 ≈ π/ В частности для 3-х рычагов (фиг.4).
L = l12(i+1)•(2+cosβ1)
Вариант рычажного редуктора по фиг. 2 обеспечивает при увеличении начального угла β1 от 0 до угла, близкого к π/2, увеличение в выигрыше в силе на ведомом рычаге, что выше подробно обосновано. Поэтому при неизменном количестве рычагов и передаточного отношения каждого рычага редуктор может иметь значительный выигрыш в силе от "входа к выходу", когда углы их взаимного наклона будут близки к π/2.
Вариант рычажного редуктора по фиг. 4 будет иметь продольный габарит, мало отличающийся от длины одного рычага, когда рычаги наклонены относительно друг друга под углом, близким к π, с чередованием знака угла β наклона между соседними рычагами при их количестве более двух.
В вариантах рычажных редукторов по фиг. 5, 6 свободные концы крайних рычагов имеют форму, пригодную для силового контакта с нагружающей и нагружаемой поверхностями в качестве подъемника или в качестве силового узла в другом механизме или имеют шарнирные концы и продольные прорези для кинематической связи с ведущим и ведомым звеньями другого механизма.
Приведенные варианты рычажных редукторов простейшие и могут быть в других вариантах дополнены и развиты присоединением дополнительных рычагов, имеющих кулисную связь с предыдущим рычагом и независимые шарнирные опоры на общем основании.
В качестве варианта рычажного редуктора предлагается его схема, пригодная, например, для рычажного подъема груза с доступной нижней поверхностью (см. фиг. 5), например, мебели, борта автомашины, бурта его колеса и др.
Рычаги 1, 2, 3 с начальными углами взаимного наклона, близкими к π,, шарнирно закреплены соответственно на своих стойках 4, 5, 6 на общем основании - плите 11. Рычаги 1, 2 имеют поводковые ролики 7, 8 (например в виде радиально-упорных шарикоподшипников), которые имеют диаметр, равный ширине прорези в плечах соседних рычагов.
Длинное плечо ведущего рычага 1 имеет форму поверхности на конце 9, удобную (плоскую) для нажатия рукой, ногой человека, а короткое плечо 10 ведомого рычага 3, поверхность, пригодную для силового контакта, без повреждений, с нижней поверхностью груза.
Для подъема груза короткий конец рычага 3 подводится под груз, а на конец длинного плеча рычага 1 производится нажим ногой, рукой (см. пунктир на фиг. 5). Плита 11 может иметь регулируемые по высоте ножки. Заметим, что по формуле [6], полагая, например l=2,5,  и при длине короткого плеча l = 16 см, имеем k3 = 21, а продольный габарит L = 55 см. Для сравнения укажем, что ту же функцию подъема груза, простой рычаг (Архимеда) при той же длине l короткого плеча и того же выигрыша в виде k3 должен иметь длину L = 292 см.
и при длине короткого плеча l = 16 см, имеем k3 = 21, а продольный габарит L = 55 см. Для сравнения укажем, что ту же функцию подъема груза, простой рычаг (Архимеда) при той же длине l короткого плеча и того же выигрыша в виде k3 должен иметь длину L = 292 см.
Отсюда видно, что предлагаемый вариант рычажного редуктора имеет продольный габарит L, в 5 раз меньший, и следовательно будет полезен.
Заметим, что для уменьшения удельных нагрузок вместо ролика 8 может быть поводковый ползун с шарниром, применяемый в кулисных механизмах.
Укажем, что рычажный редуктор может быть применен как силовой узел другого механизма для получения в нем между ведущим и ведомым звеньями нужного выигрыша в силе по нужному направлению. При этом соответствующие концы рычагов должны иметь шарниры или продольные (кулисные) прорези, необходимые для обеспечения их кинематической связи с указанными звеньями.
В качестве варианта приводим схему рычажного редуктора, в котором (см. фиг. 6) рычаги 1, 2, 3 со своими опорами 4,5,6, расположенными на общей платформе, параллельной плоскости действия рычагов (см. пунктир), кинематически соединяют в механизме (например штампа) его ведущие звенья (кривошип 7, шатун 8) с ведомыми звеньями (шатун 9 и шток 10 пуансона или матрицы).
Определим основные характеристики варианта.
Если, например, принять i = 4, β1 = 5/6 π, s1 = 17 см, P1 = 10 кг., то согласно формулам [6], [7] получим:
k3 = 85, Q3 = 850 кг., f3 = 2,0 мм. Если принять длину короткого плеча рычагов равной 8 см, то общий габарит рычажного редуктора в этом варианте будет 45 • 20 см2, что вполне приемлемо для силового узла механизма.
Изобретение относится к машиностроению и может найти применение в производственных и транспортных машинах. Рычажный редуктор содержит по меньшей мере два рычага, имеющих шарнирные опоры, расположенные между их концами на общем основании или платформе, и связанные со скольжением между собой кулисной связью при начальном угле их взаимного наклона. Рычаги могут быть наклонены относительно друг друга под углом, близким к π, с чередованием знака угла наклона между соседними рычагами. Для использования рычажного редуктора в качестве силового угла в другом механизме свободные концы крайних рычагов имеют форму, пригодную для их силового контакта с нагружающей и нагружаемой поверхностями. Для кинематической связи с ведущим и ведомый звеньями другого механизма свободные концы крайних рычагов имеют шарнирные концы или продольные прорези. Изобретение обеспечивает неразрывную связь между рычагами и выигрыш в силе. 3 з.п.ф-лы. 6 ил.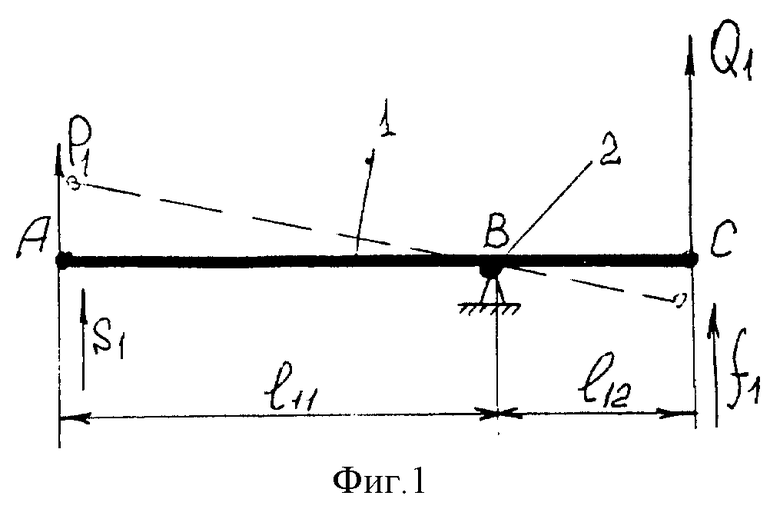
| ТЕПЛОВЫДЕЛЯЮЩАЯ СБОРКА ЯДЕРНОГО ВОДО-ВОДЯНОГО ЭНЕРГЕТИЧЕСКОГО РЕАКТОРА | 2003 |
|
RU2255384C2 |
| DE 4129832 A1, 25.03.93 | |||
| Способ лечения гнойно-септических заболеваний | 1983 |
|
SU1202586A1 |
| Кожевников С.Н | |||
| Механизмы | |||
| Планшайба для точной расточки лекал и выработок | 1922 |
|
SU1976A1 |
| Артоболевский И.И | |||
| Механизмы в современной технике | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
