Изобретение относится к шарнирно-рычажным приводам с периодическим прерывистым движением выходного звена при непрерывном вращением входного звена от приводного двигателя и может найти применение в различных высокоточных обрабатывающих центрах, сборочных конвейерах, кузнечнопрессовом оборудовании, автоматических линиях и штучных досылателях.
Известен зубчато-рычажный механизм с приближенным выстоем ползуна на основе планетарного механизма, в котором к точке на сателлите, совершающей движение по сложной кривой в виде гипоциклоиды - присоединена точка шатуна рычажного механизма с движением по дуге окружности (книга А.Ф. Крайнев «Словарь-справочник по механизмам» - М.: «Машиностроение», 1987, с. 65, рис. а)) - аналог.
Недостатками известного зубчато-рычажного механизма являются сложность конструкции, большие габариты, возникающее перемещение ползуна выходного звена в фазе «приближенного выстоя» (из-за расхождения между гипоциклоидой и дугой окружности); невозможность управляемой неограниченной остановки рабочего органа при непрерывном вращении ведущего кривошипа (что требует отключения приводного двигателя и снижает производительность), а также возникающие жесткие удары при переходе от движения к выстою (в книге А.Ф. Крайнева, стр. 65, рис. б)), что подтверждается отсутствием на графике движения плавных переходов в точках перегиба кривой).
Наиболее близким по технической сущности и достигаемому эффекту к предлагаемому изобретению является приближенный круговой шестизвенный кривошипно-коромысловый механизм, двухконтурная кинематическая цепь которого содержит трехшарнирную стойку, поворотный кривошип, два раздельных коромысла, а также два шатуна в виде трехшарнирного и двухшарнирного рычажных звеньев, точка Е соединения которых перемещается по сложной кривой, отличающейся от дуги окружности, что исключает точную остановку выходного звена (та же книга А.Ф. Крайнев, М.: «Машиностроение», 1987, с. 65, рис. а) - прототип.
Недостатками указанного кругового кривошипно-коромыслового механизма являются:
1) Сложность конструкции и большие габариты из-за невозможности складывания между собой трех- и двухшарнирных звеньев.
2) Возникающие угловые перемещения ведомого коромысла в фазе «приближенной остановки» препятствуют применению данного механизма в точных технологических операциях сверления и сборки.
3) Невозможность управляемой неограниченной точной остановки выходного звена требует отключения двигателя, что снижает быстродействие и производительность.
4) Возникающие жесткие удары при переходе от движения к приближенному выстою ограничивают быстродействие рабочего органа и срок службы привода.
В основу изобретения положена техническая задача, заключающаяся в упрощении конструкции, компактности механизма в нерабочем положении, достижении точного внутрициклового выстоя и управляемой неограниченной остановки рабочего органа при работающем двигателе в сочетании с плавным безударным переходом от движения к точному выстою.
Получение технического результата достигается за счет того, что шарнирно-рычажное устройство привода движения выходного рабочего органа выполнено в виде сборки в общий замкнутый контур со стойкой двухшарнирных рычажных звеньев ведущего кривошипа, шатуна и подпружиненного относительно стойки выходного звена, последовательно соединенных между собой через беззазорные цилиндрические шарниры, при этом длина ведущего кривошипа равна длина шатуна, а длина шатуна выполнена меньше длины стойки.
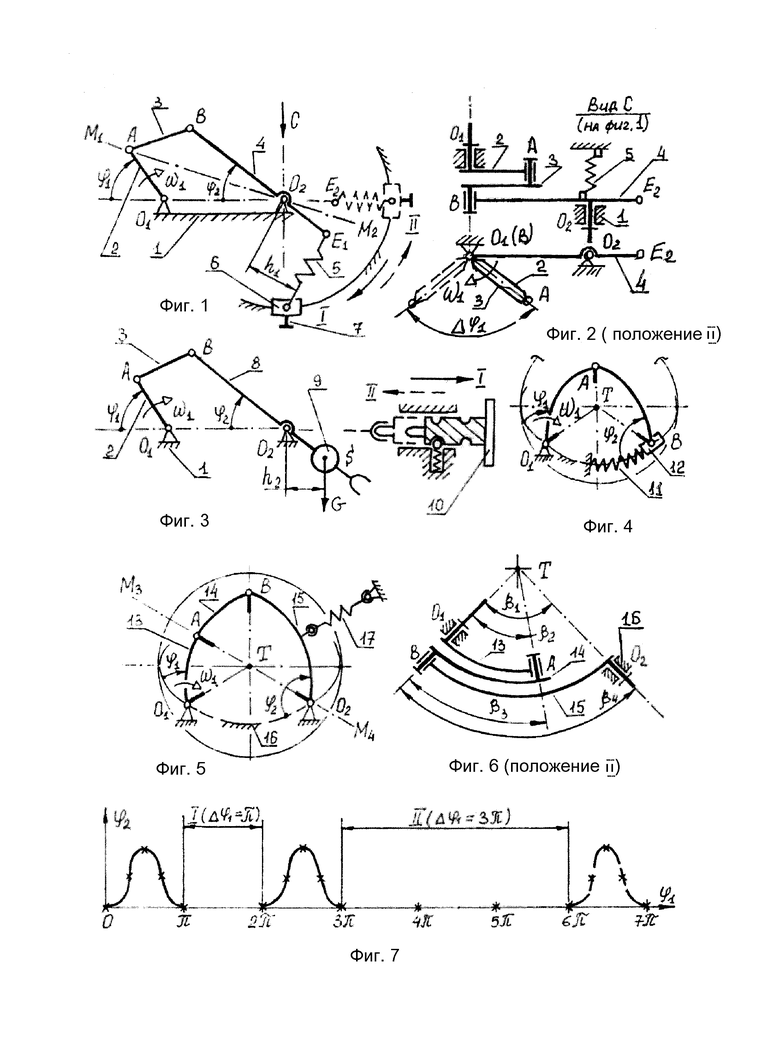
Сущность изобретения поясняется чертежами на фиг. 1, фиг. 2, фиг. 3, фиг. 4, фиг. 5, фиг. 6 и фиг. 7 (где ϕ1, ϕ2 - углы поворота ведущего кривошипа и выходного звена, Δϕ1 - угол точного выстоя).
На фиг. 1 и фиг. 2 изображен общий вид рычажного механизма с точным длительным выстоем, представляющего плоский четырехзвенный кривошипно-коромысловый механизм в фазе движения выходного вала (при разложенном положении звеньев на фиг. 1) и в фазе его точной продолжительной остановки (при сложенном положении звеньев на фиг. 2).
Приводное шарнирно-рычажное устройство механизма выполнено в виде сборки в общий замкнутый контур со стойкой двухшарнирных рычажных звеньев ведущего кривошипа 2, шатуна 3 и подпружиненного относительно стойки 1 выходного звена в виде шарнирно установленного на стойке ведомого гибко-упругого коромысла 4, последовательно соединенных между собой через беззазорные цилиндрические шарниры О1,А,В и О2.
Длина каждого из упомянутых двухшарнирных рычажных звеньев 1, 2, 3 и 4 равна соответствующему расстоянию между осями расположенных на их концах шарниров следующим образом:
1) Длина О1А ведущего кривошипа 2 равна длине АВ шатуна 3;
2) Длина ВО2 ведомого коромысла 4 равна длине О1О2 стойки 1;
3) Длина О1А ведущего кривошипа 2 (и равная ей длина АВ шатуна 3) выполнена меньше длины О1О2 стойки 1;
что обеспечивает выполнение следующих условий сборки сложенного механизма (фиг. 2):

Оси всех цилиндрических шарниров рычажных звеньев 1, 2, 3 и 4 расположены параллельно между собой и выполнены с возможностью соосной прямолинейной установки осей шарниров В и О1 на одной линии в компактном сложенном положении механизма (фиг. 2) для образования плоского четырехзвенного ромбического механизма с одной осью симметрии M1M2, проходящей через диагональ с шарнирами А и О2.
Ведомое коромысло 4 через упругое звено 5, например, в виде пружины или торсионного вала соединено с установленным на стойке 1 регулировочным круговым ползуном 6 со стопором 7. Установка регулировочного ползуна 6 с упругим звеном 5 в положении I (с плечом h1) приводит к движению из Е1 в Е2 выходного звена с внутрицикловым выстоем, а другая установка II регулировочного ползуна 6 с упругим звеном 5 на линии O2O1 (проходящей через шарниры стойки O2 и O1) приводит к неограниченной многоцикловой остановке выходного звена при непрерывном вращении ведущего кривошипа и приводного двигателя (со скоростью ω1).
На фиг. 3 представлен вариант выполнения рычажного механизма, в котором выходное звено выполнено в виде двухшарнирного рычага BO2 со свободным концом и смещенным на плечо h2 относительно стойки центром тяжести S, например, за счет установки на его свободном конце дополнительного груза 9 с силой тяжести G для создания на выходном звене гравитационного вращающего момента (М=G*h2), действующего в сторону вращения ведущего кривошипа, а на стойке установлен отключаемый фиксатор 10 горизонтального положения ведомого коромысла 8.
Установка отключаемого фиксатора 10 отдельно от ведомого коромысла 8 (в положение I) обеспечивает возможность управляемого поворота коромысла 8 в первой части цикла (при повороте ведущего кривошипа на угол 0≤ϕ1≤π) и его точный внутрицикловый выстой во второй части цикла (при π≤ϕ1≤2π). Перемещение этого фиксатора 10 влево и блокировка им коромысла 8 со стойкой 1 (в его горизонтальном положении II), когда происходит совместное вращение ведущего кривошипа 2 и шатуна 3 вокруг оси O1 - вызывает точную неограниченную многоцикловую остановку выходного звена с рабочим органом.
Конструктивно упругое звено 5 может быть выполнено в виде пружины кручения или торсионного вала, расположенного вдоль оси шарнира ведомого коромысла O2 (фиг. 2).
На фиг. 4 представлен вариант выполнения приводного шарнирно-рычажного устройства, в котором выходное звено выполнено в виде подпружиненного через упругий элемент 11 относительно стойки радиально изогнутого ползуна 12, который установлен на сферической поверхности с центром, совпадающим с общей точкой Т пересечения осей всех цилиндрических шарниров и кинематически связан с шатуном выполненным одинаковой с ведущим кривошипом О1А длины между осями шарниров, для образования пространственного сферического четырехзвенного кривошипно-ползунного механизма с точным выстоем и всеми одноподвижными вращательными кинематическими парами.
На фиг. 5 и фиг. 6 показан вариант выполнения рычажного механизма с точным длительным выстоем, представляющий пространственный сферический четырехзвенный кривошипно-коромысловый механизм в фазе движения выходного вала (при разложенном положении звеньев на фиг. 5) и в фазе его точной продолжительной остановки (при сложенном положении звеньев на фиг. 6).
В этом варианте рычажного механизма оси всех цилиндрических шарниров О1, A, В и О2 выполнены пересекающимися между собой в одной общей точке Т и выполнены с возможностью соосной угловой установки пересекающихся осей шарниров О1 и В на одной линии (тоже проходящей через общей точку Т на фиг. 5) в сложенном положении сферического механизма (показании на фиг. 6) - для образования пространственного сферического механизма с одной осью симметрии М3М4, проходящей через диагональ с пересекающимися осями шарниров О2 и А.
Пространственный сферический четырехзвенный кривошипно-коромысловый механизм с выстоем содержит общий замкнутый контур, образованный стойкой 16 и установленными на ней и соединенными между собой (посредством цилиндрических шарниров с пересекающимися в общей точке Т осями) рычажными звеньями в виде ведущего кривошипа 13, шатуна 14 и ведомого коромысла 15, подпружиненного относительно стойки 16 через упругое звено 17.
Все рычажные звенья 13, 14, 15 и 16 данного сферического кривошипно-коромыслового механизма с выстоем выполнены в виде плоских пластин с цилиндрическими шарнирами на их обоих концах, которые выполнены радиально изогнутыми вокруг общей точки Т пересечения всех осей цилиндрических шарниров. Центральные углы β2 и β3, а также β1 и β4 выполнены попарно одинаковыми на радиально изогнутых пластинах ведущего кривошипа (β2) и шатуна (β3=β2), а также на радиально изогнутых пластинах ведомого коромысла (β4) и стойки (β1, где β4=β1). При этом центральный угол β2 между осями шарниров на ведущем кривошипе 13 и равный ему центральный угол β3 на шатуне 14 выполнены меньше центрального угла β1 между осями шарниров на стойке 16 и равного ему центрального угла β4 на ведомом коромысле 15 по соотношению (2):

На фиг. 7 представлен полученный автором экспериментальный график угловых перемещений (ϕ2) выходного звена действующей модели при изменении угла поворота ϕ1 ведущего кривошипа (в виде функции положения данного четырехзвенного механизма), из анализа которого следует:
1) За полный цикл поворота ведущего кривошипа на угол ϕ1=2π происходит точная продолжительная (в пределах Δϕ1=π полуцикла) остановка выходного звена при непрерывном вращении ведущего кривошипа.
2) За счет простого перемещения регулировочного ползуна (фиг. 1) или сдвига фиксатора (фиг. 3) из положения I в положение II обеспечивается управляемая точная многоцикловая остановка выходного звена в пределах угла Δϕ1=(1+2k)π, (где задается k=0; 1; 2; 3; …) при работающем приводном двигателе и непрерывно вращающемся ведущем кривошипе.
3) Наличие на графике (фиг. 7) плавных переходных кривых при разгоне и остановке выходного звена указывает, что данный рычажных механизм с соотношениями длин звеньев (1) в течении всего цикла обеспечивает безударный переход от движения к выстою и обратно.
Работа представленного рычажного механизма заключается в следующем.
Полный цикл работы предлагаемого рычажного механизма равен 1-му полному обороту ведущего кривошипа на угол ϕ1=2π вокруг шарнира О1 стойки и в зависимости от взаимного расположения (фиг. 1) при этом оси шарнира В (между шатуном и выходным звеном) относительно оси O1 (шарнира стойки) разделяется на 2 разные фазы (фиг. 7):
1) Фаза движения выходного звена в первой половине цикла (ϕ1=0-π) - возникает в разложенном положении звеньев рычажного механизма из-за смещения шарнира В относительно оси O1 шарнира стойки и представляет разгон и торможение до нуля этого звена.
2) Фаза точной длительной остановки выходного звена во второй половине цикла (ϕ1=π-2π) - возникает в сложенном положении механизма (при компактном параллельном расположении всех звеньев между собой), когда в результате точного совпадения осей шарниров В и O1 (фиг. 2, фиг. 6) шатун и ведущий кривошип вращаются как одно звено, а выходное звено кинематически совмещается со стойкой вдоль ее длины и поэтому превращается со стойкой в одно неподвижное звено при ϕ1=π-2π. В результате указанных структурных преобразований во второй половине цикла (в интервале ϕ1=π-2π) исходный четырехзвенный рычажных механизм преобразуется в двухзвенный с точным внутрицикловым выстоем длительностью Δϕ1=π.
Этапы управления работой рычажного механизма:
а) При установке ползуна 6 на фиг. 1 (или фиксатора 10 на фиг. 3) в позиции I упругое звено 5 на плече h1 создает на ведомом коромысле O2 В вращающий момент, который действует в сторону вращения ведущего кривошипа О1А (показанного стрелкой с ω1) и приводит к движению ведомого коромысла О1 В с точным длительным внутрицикловым выстоем, показанном на фиг. 7.
б) При установке регулировочного ползуна 6 на фиг. 1 (или сдвига фиксатора на фиг. 3) в другой позиции II, когда линия действия упругого звена 5 в виде пружины совмещена с линией O2O1 стойки - упругий вращающий момент на ведомом коромысле из-за h1=0 тоже равен нулю. В результате этого происходит точная многоцикловая остановка выходного вала заданной продолжительности (фиг. 7) при непрерывном вращении ведущего кривошипа.
Достигаемый в предлагаемом рычажном механизме технический эффект заключается в следующем:
1. Упрощение конструкции (за счет применения только четырех простых двухшарнирных рычагов с простыми цилиндрическими шарнирами).
2. Компактность в сложенном положении (за счет возможности расположения всех рычажных звеньев один вдоль другого).
3. Точный длительный выстой выходного звена в пределах половины всего цикла за 1 оборот кривошипа расширяет применение в точных операциях.
4. Возможность (за счет простого установочного перемещения регулировочного ползуна на фиг. 1 или сдвига отключаемого фиксатора на фиг. 3) обеспечения управляемой точной многоцикловой остановки выходного звена для выполнения разных операций при работающем двигателе и вращающимся кривошипе.
5. В течении всего цикла отсутствуют жесткие и мягкие удары во всех кинематических парах механизма при переходах от движения к точным остановкам выходного вата с рабочим органом.
| название | год | авторы | номер документа |
|---|---|---|---|
| КРИВОШИПНЫЙ МЕХАНИЗМ В.И. ПОЖБЕЛКО С ТОЧНЫМИ ОСТАНОВКАМИ | 2005 |
|
RU2283446C1 |
| ШАРНИРНЫЙ ВИБРОУДАРНЫЙ МЕХАНИЗМ | 2022 |
|
RU2783900C1 |
| РЫЧАЖНЫЙ МЕХАНИЗМ В.И. ПОЖБЕЛКО | 2003 |
|
RU2246056C1 |
| КРИВОШИПНЫЙ МЕХАНИЗМ ИЗМЕНЯЕМОЙ СТРУКТУРЫ | 2020 |
|
RU2750997C1 |
| СПОСОБ И МЕХАНИЗМ В.И. ПОЖБЕЛКО ДЛЯ ВОСПРОИЗВЕДЕНИЯ ВРАЩЕНИЯ С ОСТАНОВКАМИ | 2003 |
|
RU2249133C1 |
| ШАРНИРНЫЙ КРИВОШИПНЫЙ МЕХАНИЗМ | 2020 |
|
RU2740526C1 |
| СКЛАДЫВАЮЩИЙСЯ МНОГОКРАТНЫЙ КРИВОШИПНО-КОРОМЫСЛОВЫЙ МЕХАНИЗМ | 2024 |
|
RU2833554C1 |
| СПОСОБ И УСТРОЙСТВО РЕГУЛИРОВАНИЯ УГЛА ВЫСТОЯ ЗУБЧАТО-РЫЧАЖНОГО МЕХАНИЗМА | 2005 |
|
RU2285168C1 |
| ШАРНИРНЫЙ МЕХАНИЗМ | 2021 |
|
RU2753064C1 |
| ПАРАЛЛЕЛОГРАММНЫЙ ПРЯМОЛИНЕЙНО-НАПРАВЛЯЮЩИЙ МЕХАНИЗМ | 2021 |
|
RU2769002C1 |
Изобретение относится к шарнирно-рычажным приводам. Рычажный механизм с точным длительным выстоем содержит приводное шарнирно-рычажное устройство, которое выполнено в виде сборки в общий замкнутый контур со стойкой двухшарнирных рычажных звеньев ведущего кривошипа, шатуна и подпружиненного относительно стойки выходного звена, последовательно соединенных между собой через беззазорные цилиндрические шарниры, при этом длина ведущего кривошипа равна длине шатуна, а длина шатуна выполнена меньше длины стойки. Достигается упрощение конструкции и ее компактности в сложенном положении. 7 ил.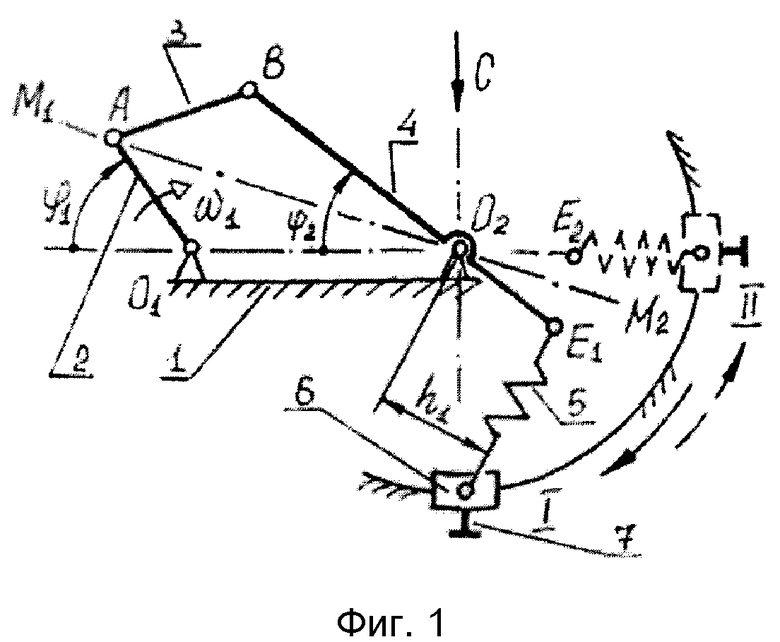
Рычажный механизм с точным длительным выстоем, содержащий приводное шарнирно-рычажное устройство, состоящее из стойки, ведущего кривошипа, шатуна и выходного звена в виде ведомого коромысла, отличающийся тем, что рычажный механизм снабжен установленным на стойке регулировочным круговым ползуном, который соединен с ведомым коромыслом через упругое звено, например в виде пружины, и выполнен с возможностью его установки на стойке в одном положении I с плечом "h" расположения упругого звена относительно оси O2 поворота ведомого коромысла для обеспечения движения выходного звена ведомого коромысла с внутрицикловым выстоем, равным ΔY1=π, или в другом положении II на линии O2O1, проходящей через шарниры стойки О2 и О1 для обеспечения неограниченной многоцикловой остановки выходного звена ведомого коромысла при непрерывном вращении ведущего кривошипа, где обозначено ΔY1 - угол поворота ведущего кривошипа за время выстоя.
| КРИВОШИПНЫЙ МЕХАНИЗМ В.И. ПОЖБЕЛКО С ТОЧНЫМИ ОСТАНОВКАМИ | 2005 |
|
RU2283446C1 |
| ШАРНИРНЫЙ ВИБРОУДАРНЫЙ МЕХАНИЗМ | 2022 |
|
RU2783900C1 |
| ПОЗИЦИОНИРУЮЩЕЕ УСТРОЙСТВО | 1994 |
|
RU2080631C1 |
| Артоболевский И.И | |||
| Механизмы в современной технике, т | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Железнодорожный снегоочиститель | 1920 |
|
SU264A1 |
| Машина для производства земляных работ | 1919 |
|
SU523A1 |
| Привод механизма с длительным выстоем выходного звена | 1988 |
|
SU1593772A1 |
| Паровоз для отопления неспекающейся каменноугольной мелочью | 1916 |
|
SU14A1 |
| СТЕНД ДЛЯ ВОСПРОИЗВЕДЕНИЯ УГЛОВЫХ СКОРОСТЕЙ | 2006 |
|
RU2306571C1 |
| Преобразователь равномерного вращения в неравномерное | 1985 |
|
SU1247112A1 |

