Изобретение относится к области машиностроения, в частности к устройствам двигателей внутреннего сгорания для управления процессом топливоподачи.
Ранее известен электромагнитный привод для управления подачей топлива в двигатель внутреннего сгорания топливным насосом высокого давления, в частности для управления дозирующим клапаном насос-форсунки (патент ФРГ 3704579, кл. H 01 F 7/16, F 02 M 51/04).
Привод содержит электромагнит броневого типа, включающий магнитопровод, выполненный в виде тела вращения с глухой кольцевой выточкой, из элементов, расположенных в направлении прохождения магнитного потока, и обмотку, размещенную в кольцевой выточке, и якорь, связанный с управляющим клапаном и выполненный в виде ступенчатой тарелки, причем поверхности, взаимодействующие с магнитопроводом, размещены в разных плоскостях.
Такой привод развивает недостаточное усилие для управления давлением выше 100 МПа. При увеличении сечений магнитной системы средняя длина пути магнитного потока получается больше оптимальной, т.е. увеличивается магнитное сопротивление и время переходных процессов в магнитопроводе, увеличивается масса якоря и перегрев обмотки.
Выполнение магнитопровода из секторов крайне нетехнологично и требует специального оборудования. Известен также электромагнитный привод для управления иглой форсунки двигателя внутреннего сгорания (патент ФРГ 3041772, кл. F02 М 51/06). Привод содержит корпус, электромагнит-геленоид, включающий пилообразный якорь, свободно перемещающийся в осевом направлении внутри корпуса, и сердечник пилообразной формы с закрепленной на нем обмоткой, жестко связанный с корпусом. Обмотка геленоида размещена между двумя параллельными полюсами сердечника, образующими двухзаходный винт.
Для геленоида характерно сохранение оптимальной средней длины пути магнитного потока при значительно больших, чем у броневого магнита, сечениях магнитной системы (и, следовательно, развиваемых усилиях). Однако масса якоря геленоида примерно равна массе сердечника (при условии равенства сечений), и с увеличением развиваемого усилия пропорционально увеличивается масса подвижных частей привода.
Изготовление и намотка винтовых частей геленоида требует применения специального оборудования.
Форма рабочих поверхностей магнитной системы геленоида обуславливает наличие момента вращения якоря, что приводит к увеличению трения и износу направляющих.
Кроме того, для геленоида характерно наличие паразитных магнитных зазоров, расположенных внутри магнитной системы. Стремление уменьшить их (с целью уменьшения габаритов) приводит к возрастанию потоков рассеяния и, следовательно, уменьшению полезного магнитного потока и развиваемого усилия.
Целью изобретения является повышение быстродействия, развиваемого усилия и технологичности электромагнитного привода. Достигается поставленная цель тем, что обмотка электромагнита выполнена распределенной и размещена в прямых параллельных пазах магнитопровода таким образом, что элемент магнитопровода, разделяющий два соседних паза, является сердечником части обмотки, причем количество пазов магнитопровода не менее трех. Якорь выполнен в виде пластины преимущественно круглой формы, которая связана с направляющей движения якоря.
Целесообразно для достижения поставленной цели выполнить обмотку в виде пакета плоских проводников так, чтобы в пределах каждого слоя проводник не образовывал замкнутых витков.
Целесообразно для достижения поставленной цели выполнить магнитопровод шихтованным так, чтобы листы магнитомягкого материала располагались перпендикулярно пазам магнитопровода.
Как вариант шихтованный магнитопровод может также быть выполнен в виде набора U- образных элементов, каждый из которых представляет собой пакет листов магнитомягкого материала.
Целесообразно в некоторых случаях направляющую якоря выполнять в виде упругой мембраны.
Заявляемое устройство сочетает положительные качества геленоида и броневого электромагнита. Как у броневого электромагнита, его якорь и магнитопровод имеют простую и технологичную конструкцию, масса якоря составляет сравнительно небольшую часть общей массы магнитной системы. В то же время конструкция заявляемого устройства позволяет обеспечить оптимальную среднюю длину пути магнитного потока, требуемую величину постоянной времени магнитной системы (за счет оптимального соотношения индуктивности и активного сопротивления обмотки выполнения шихтовки магнитопровода), значительная теплоотводящая поверхность обмотки позволяет использовать электромагнит в форсированном режиме.
Использование настоящего изобретения позволит достигнуть высокой эффективности управления подачей топлива за счет повышения быстродействия привода, увеличения развиваемых усилий, сокращения магнитных потерь. При этом конструкция и технология изготовления электромагнитного привода проще, чем у других типов секционированных электромагнитов (геленоидов, сектороидов, коленоидов и пр.).
Вышеперечисленные особенности конструкции позволяют использовать настоящее изобретение для привода управляющего элемента, нагруженного значительным гидравлическим усилием и работающего при частотах до 60...100 Гц. При этом сравнительная простота и технологичность конструкции делает экономически оправданным широкое применение топливных систем с электронным управлением.
В дальнейшем настоящее изобретение поясняется подробным описанием электромагнитного привода, управляющего элемента, конкретных вариантов его выполнения и чертежами, на которых:
фиг. 1 изображает общий вид первого варианта выполнения электромагнитного привода (продольный разрез), согласно изобретению;
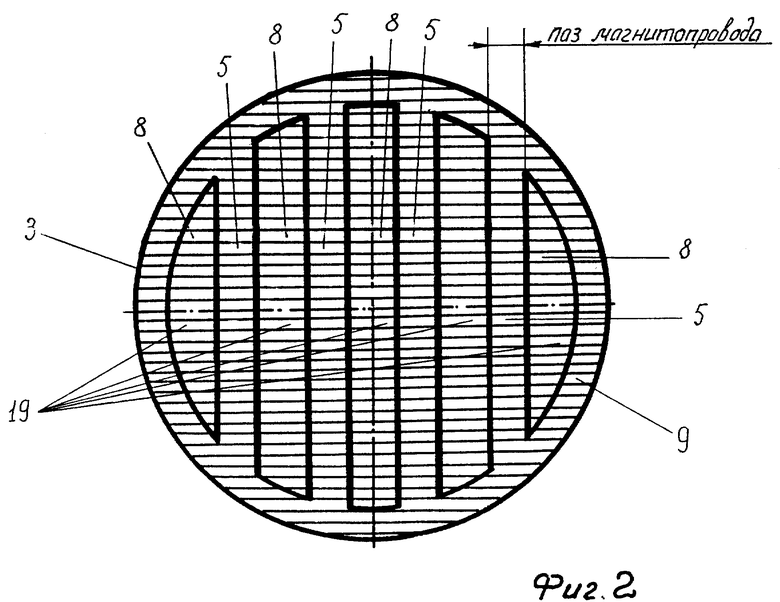
фиг. 2 - магнитопровод первого варианта выполнения электромагнитного привода (вид снизу по фиг. 1), согласно изобретению;
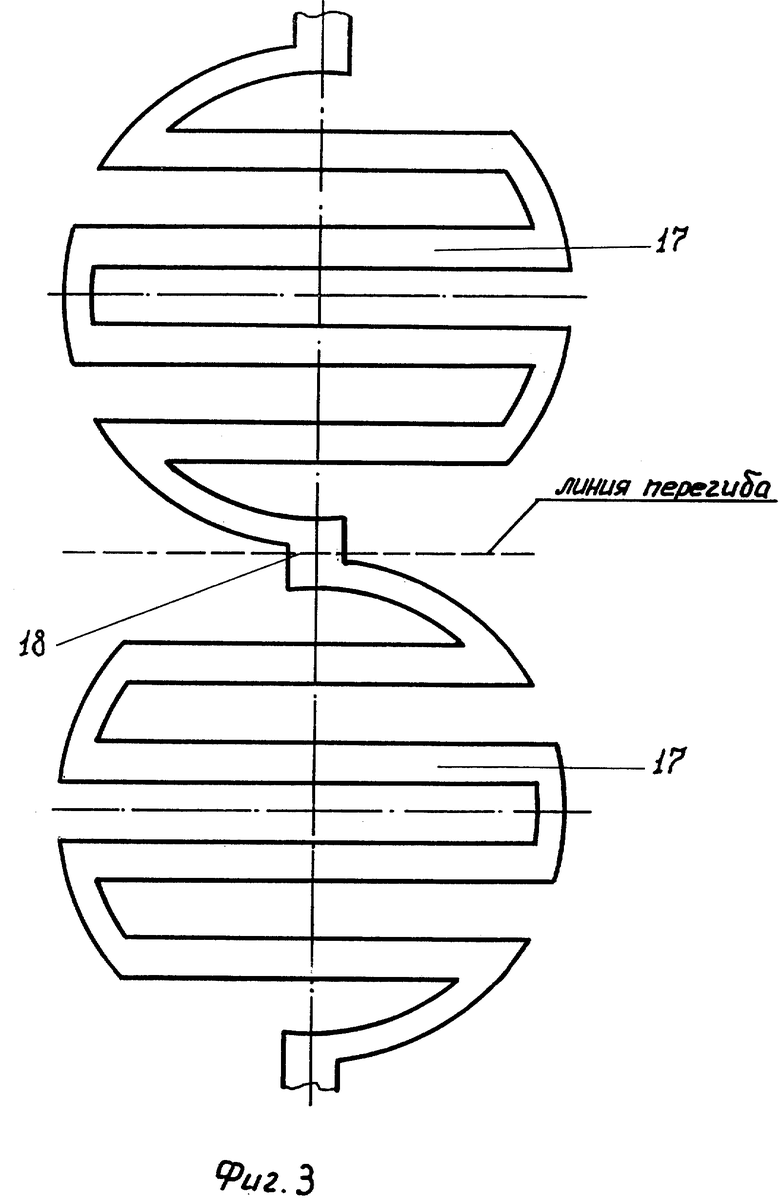
фиг. 3 - вариант выполнения обмотки электромагнитного привода (из плоских проводников, показана форма элемента обмотки), согласно изобретению;
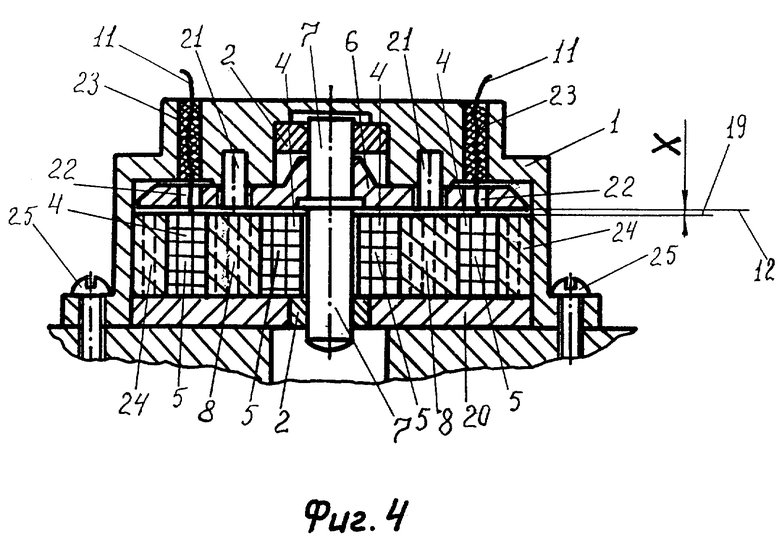
фиг. 4 - второй вариант выполнения электромагнитного привода (продольный разрез), согласно изобретению;
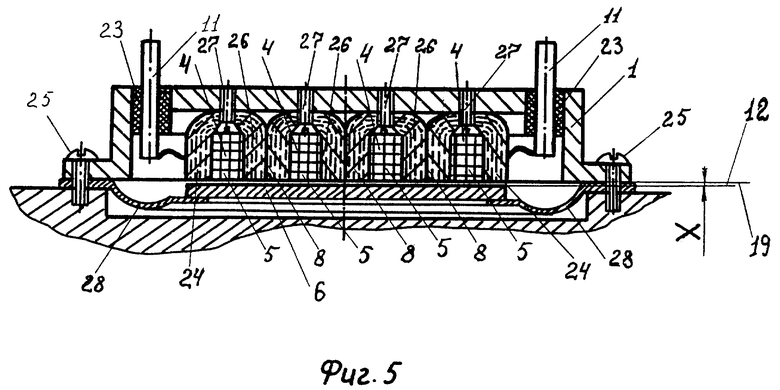
фиг. 5 - третий вариант выполнения электромагнитного привода (продольный разрез), согласно изобретению.
Лучший вариант выполнения электромагнитного привода (фиг. 1) содержит корпус 1 с направляющей втулкой 2, магнитопровод 3 с обмоткой 4, размещенной в пазах 5 магнитопровода 3, якорь 6, в данном варианте жестко-связанный с направляющей движения якоря 7.
Магнитопровод 3 (фиг. 2) выполнен круглой формы. Такая форма предпочтительна с точки зрения технологичности, однако при необходимости (например, для удобства размещения на двигателе) форма магнитопровода может отличаться от круглой. Пазы 5 магнитопровода 3 служат для размещения частей обмотки 4, элемент 8 магнитопровода 3 является сердечником для части обмотки 4 (т.е. проводник с током образует замкнутые витки вокруг этого элемента). Упорный буртик 9 магнитопровода 3 служит для установки его в корпусе 1. В варианте по фиг. 1 магнитопровод 3 фиксируется в корпусе 1 завальцовкой пояска 10. Выводы 11 обмотки 4 выполнены через отверстия в магнитопроводе 3. Якорь 6 выполнен в виде пластины, форма которой подобна форме магнитопровода 3 (его рабочей поверхности). Направляющая движения якоря 7 жестко связана с якорем 6 и содержит резьбовой элемент 13 для передачи тягового усилия нагрузке. Корпус 1 электромагнитного привода выполнен осесимметричным и содержит присоединительную резьбу 14 с контргайкой 15 для фиксации в требуемом положении при регулировке зазора X. Кольцевое уплотнение 16 служит для герметизации корпуса 1 электромагнитного привода от внешней среды. С целью уменьшения замедляющего и нагревающего действия вихревых токов, возникающих при пульсациях магнитного потока, магнитопровод 3 электромагнитного привода может быть выполнен шихтованным (набран из листов магнитомягкого материала, электрически изолированных друг от друга). Вариант направления шихтовки показан на фиг. 2 (границы листов показаны тонкими линиями). С целью повышения теплопроводности и теплостойкости обмотка 4 может быть выполнена в виде набора (пакета) плоских проводников 17 (фиг. 3). Непрерывная лента из элементов 17 складывается "гармошкой" по линиям перегиба 18 и соединяется (например, склеивается) в единый пакет. При этом замкнутые витки вокруг элементов 8 магнитопровода 3 образуют проводники двух соседних слоев пакета. При сборке элементы 17 не подвергаются деформации, что дает возможность использовать для электроизоляции хрупкие и листовые материалы (слюда, оксидные пленки, керамические эмали), обладающие высокой теплостойкостью и теплопроводностью.
Работает электромагнитный привод следующим образом: при отсутствии управляющего сигнала на выводах обмотки 4 отсутствует и тяговое усилие на якоре 6. Якорь 6 находится в крайнем нижнем (по фиг. 1) положении, будучи смещен воздействием внешнего усилия, например возвратной пружины клапана. Между рабочими поверхностями 12 якоря и 19 магнитопровода существует рабочий зазор X. При возбуждении обмотки 4 управляющим сигналом в сердечнике 8 магнитопровода 3 наводится магнитный поток, который через рабочий зазор X, якорь 6 и снова рабочий зазор X замыкается на соседние элементы 8, в которых наводится магнитный поток противоположной полярности. С обратной от якоря стороны магнитопровода 3 магнитные потоки, проходящие по элементам 8, замыкаются через основание магнитопровода 20. Магнитный поток в рабочем зазоре X вызывает силовое взаимодействие якоря 6 с магнитопроводом 3. Магнитная система стремится замкнуть рабочий зазор X, совершая работу по перемещению якоря 6 и, следовательно, связанной с ним нагрузки. Если нагрузка не ограничивает осевое перемещение якоря 6, то он сместится в крайнее верхнее (по фиг. 1) положение до соприкосновения рабочих поверхностей 12 якоря и 19 магнитопровода. При снятии с обмотки 4 управляющего сигнала, ток в ней, а, следовательно, и магнитный поток в рабочем зазоре начинают убывать по закону, определяемому индуктивностью магнитной системы. Соответственно уменьшается усилие, развиваемое приводом. В момент, когда тяговое усилие станет меньше внешнего противодействующего усилия, якорь 6 начнет перемещаться в крайнее нижнее (по фиг. 1) положение под действием разности этих сил. При подаче на обмотку 4 нового импульса управляющего сигнала цикл работы электромагнитного привода повторяется.
Возможен второй вариант выполнения электромагнитного привода (фиг. 4). В данном варианте электромагнитный привод выполнен толкающим. Такое решение снижает требования к соосности привода и нагрузки. Направляющая движения якоря 7 имеет две опоры - направляющие втулки 2, закрепленные в корпусе 1 и магнитопроводе 3. Якорь 6 зафиксирован от поворота вокруг своей оси штифтами 21 и связан с направляющей движения якоря 7 посадкой с радиальным зазором, благодаря чему имеется некоторая подвижность якоря 6 относительно направляющей 7 и возможность самоустановки якоря в случае соприкосновения его с магнитопроводом. Выводы 11 обмотки 4 выполнены через отверстия 22 в якоре 6 и далее отверстия 23 в корпусе 1. Магнитопровод 3 выполнен составным из основания магнитопровода 20 и сердечников 8, каждый из которых выполнен в виде пакета листов магнитомягкого материала, расположенных параллельно пазам 5 магнитопровода 3. В данном варианте крайние элементы 24 магнитопровода 3 не охвачены обмоткой и служат для замыкания части магнитного потока двух крайних сердечников 8. Крепление корпуса 1 выполнено винтами 25.
Направление шихтовки элементов магнитопровода 8 и 24 (фиг. 4) обеспечивает максимальную магнитную проводимость для полезного магнитного потока и минимальную для потоков рассеяния. Это эффект усиливается в случае применения текстурированной электротехнической стали, имеющей лишь одно направление легкого намагничивания. Работает электромагнитный привод аналогично показанному на фиг. 1. При подаче управляющего сигнала на обмотку 4 якорь 6 перемещается в крайнее нижнее (по фиг. 4) положение. При снятии управляющего сигнала якорь 6 перемещается в крайнее верхнее (по фиг. 4) положение под действием внешнего усилия.
Возможен третий вариант выполнения электромагнитного привода (фиг. 5). Магнитопровод данного варианта электромагнитного привода выполнен из U-образных элементов 26, которые крепятся к корпусу 1 винтами 27. Направляющая движения якоря выполнена в виде упругой мембраны 28, жестко связанной с якорем 6. При таком выполнении якорь 6 может выполнять роль плоского клапана (пластинчатого) либо рабочего органа диафрагменного насоса. Работает электромагнитный привод аналогично вариантам по фиг. 1 и фиг. 4. В отсутствии управляющего сигнала между рабочими поверхностями 12 якоря и 19 магнитопровода существует рабочий зазор X. При подаче управляющего сигнала на обмотку 4 якорь 6 под действием тягового усилия привода перемещается в крайнее верхнее (по фиг. 5) положение, преодолевая противодействующие усилия деформации мембраны 28 и др. При снятии с обмотки 4 управляющего сигнала якорь 6 перемещается в исходное положение (положение равновесия мембраны 28 под действием действующих на нее сил, например, давления топлива в случае использования якоря 6 в качестве поршня насоса). Если якорь 6 совершает гармонические колебания (например, в качестве диафрагмы вибронасоса), амплитуда его колебаний может отличаться от величины рабочего зазора X.
Все описанные варианты электромагнитного привода имеют плоские рабочие поверхности якоря и магнитопровода. Это наиболее технологичный вариант, обеспечивающий, к тому же, минимальный разброс параметров между несколькими одинаковыми приводами. Однако в случае, когда требуется пологая тяговая характеристика (зависимость развиваемого усилия от рабочего зазора X), возможно выполнение рабочих поверхностей профилированными, причем профили их должны быть обратны друг другу (при нулевом рабочем зазоре рабочие поверхности якоря и магнитопровод должны соприкасаться по всей площади).
Заявленные варианты электромагнитного привода, преимущественно для управления дозирующим клапаном топливного насоса высокого давления, охвачены единством конструктивного и технологического замысла. Современные требования к токсичности отработавших газов и экономичности дизельных двигателей обуславливают более высокие давления впрыскивания топлива и высокую точность управления процессом подачи топлива. Элементы, управляющие давлениями выше 100 МПа, как правило, нагружены значительным гидравлическим усилием. Малое время перестановки управляющего элемента требует применения возвратной пружины большой жесткости. Поэтому привод, предназначенный для управления таким элементом, должен развивать значительные усилия и в то же время иметь достаточно простую и технологичную конструкцию, пригодную для массового производства. Этим требованиям соответствуют заявленные варианты электромагнитного привода. Использование настоящего изобретения позволяет качественно управлять процессом впрыскивания топлива, а именно: обеспечить требуемое время открытия-закрытия, надежное запирание и удержание клапана в закрытом состоянии, качественное дозирование малых цикловых подач топлива.
Изобретение может быть использовано в качестве высокофорсированного привода управляющих элементов, исполнительных механизмов, насосов в таких областях техники как станкостроение, робототехника, в гидравлических приводах.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРОННО-МЕХАНИЧЕСКИЙ РЕГУЛЯТОР ЧАСТОТЫ ВРАЩЕНИЯ ДИЗЕЛЯ | 1997 |
|
RU2159860C2 |
| СИСТЕМА УПРАВЛЕНИЯ ТОПЛИВОПОДАЧЕЙ С ПОМОЩЬЮ ЭЛЕКТРОМАГНИТНЫХ КЛАПАНОВ | 1999 |
|
RU2191912C2 |
| ТОПЛИВОВПРЫСКИВАЮЩАЯ ФОРСУНКА ДЛЯ СИСТЕМЫ ПИТАНИЯ ДВС | 1997 |
|
RU2136947C1 |
| ИСПОЛНИТЕЛЬНЫЙ МЕХАНИЗМ ЭЛЕКТРОННОЙ СИСТЕМЫ РЕГУЛИРОВАНИЯ ЧАСТОТЫ ВРАЩЕНИЯ ДИЗЕЛЯ | 2002 |
|
RU2231663C2 |
| УСТРОЙСТВО ДЛЯ ИЗМЕНЕНИЯ ПОДАЧИ ТОПЛИВА ДИЗЕЛЯ | 1997 |
|
RU2154187C2 |
| УСТРОЙСТВО И СПОСОБ УПРАВЛЕНИЯ МОМЕНТОМ ВПРЫСКИВАНИЯ ТОПЛИВА ТРАНСПОРТНОГО ДИЗЕЛЯ | 1999 |
|
RU2198313C2 |
| ЭЛЕКТРОННО-МЕХАНИЧЕСКАЯ МУФТА РЕГУЛИРОВАНИЯ МОМЕНТА НАЧАЛА ВПРЫСКИВАНИЯ ТОПЛИВА | 2002 |
|
RU2233992C2 |
| ТОПЛИВНЫЙ НАСОС ВЫСОКОГО ДАВЛЕНИЯ АВТОМОБИЛЬНОГО ДИЗЕЛЯ | 2002 |
|
RU2230213C2 |
| СИСТЕМА ТОПЛИВОПОДАЧИ АВТОМОБИЛЬНОГО ДИЗЕЛЯ | 2002 |
|
RU2230209C2 |
| РЕГУЛЯТОР АВТОМОБИЛЬНОГО ДИЗЕЛЯ С КОРРЕКТОРОМ ПО НАДДУВУ | 1998 |
|
RU2144997C1 |
Электромагнитный привод управляющего элемента, преимущественно дозирующего клапана топливного насоса, содержащий корпус 1, электромагнит, включающий магнитопровод 3 с обмоткой 4, которая выполнена распределенной и размещена в прямых параллельных пазах 5 магнитопровода 3 таким образом, что элемент 8 магнитопровода 3, разделяющий два соседних паза 5, является сердечником части обмотки, причем количество пазов 5 не менее трех, якорь 6 выполнен в виде пластины преимущественно круглой формы, связанной с направляющей движения якоря. Обмотка 4 электромагнита может быть выполнена в виде пакета плоских проводников. Возможно выполнение магнитопровода 3 шихтованным так, чтобы листы располагались перпендикулярно пазам 5 магнитопровода. Направляющая движения якоря 6 может быть выполнена в виде упругой мембраны. Изобретение повышает быстродействие, развиваемое усилие и технологичность электромагнитного привода. 4 з.п.ф-лы, 5 ил.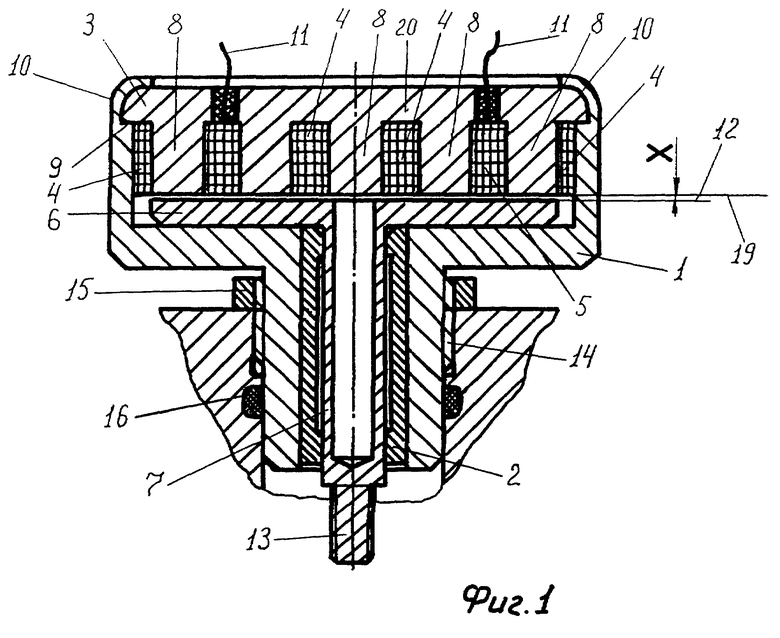
| DE 3041772 AI, 02.02.84 | |||
| DE 3704579 A1, 27.10.88 | |||
| Соленоидный клапан | 1979 |
|
SU1047399A3 |
| Электромагнит | 1991 |
|
SU1815677A1 |

