Изобретение относится к оборудованию для погрузки насыпных грузов и материалов, например в горной промышленности и др.
Известна погрузочная машина с клиновым исполнительным элементом (см. авторское свидетельство N 870311 кл. B 65 G 65/02 "Погрузочная машина")
Недостатком указанной машины является низкая эффективность рабочего процесса.
Указанный недостаток устраняется в техническом решении погрузочной машины, включающей механизм передвижки, последовательно расположенные рабочий орган, выполненный а виде U-образного желоба с исполнительным элементом в виде клина, имеющего возможность возвратно-поступательного движения под действием гидроцилиндров, и перегрузочный конвейер (см. авторское свидетельство N 1678724 кл. B 65 G 65/02 "Погрузочная машина").
Однако для выгрузки штабеля необходимо большое количество маневровых операций во время погрузки и масса машины для создания напорных усилий при внедрении в штабель.
Целью настоящего изобретения является повышение эффективности погрузки.
Эти цели достигаются путем применения погрузочной машины, имеющей механизм передвижки и последовательно расположенные рабочий орган, выполненный в виде U-образного желоба с установленным в нем исполнительным элементом, и перегрузочный конвейер, отличающейся тем, что исполнительный элемент выполнен в виде поочередно установленных подвижных, связанных между собой, и неподвижных клиньев, при этом подвижные клинья имеют возможность возвратно-поступательного перемещения под действием гидроцилиндров одностороннего действия, кинематически связанных с первым и последним подвижными клиньями. Механизм передвижки выполнен в виде гидроцилиндра, расположенного под днищем желоба рабочего органа, и цепи, закрепляемой на опережающем погрузочную машину анкере в момент передвижки.
Рабочий орган погрузочной машины позволяет работать в таком режиме, когда штабель формируется непосредственно на рабочем органе, например, на рудниках при рудоспуске или в горной промышленности при буровзрывных работах в режиме взрывонавалки, что дает возможность начать уборку горной массы из забоя до окончания времени проветривания выработки.
Существенными отличиями является то, что исполнительный элемент погрузочной машины выполнен в виде поочередно установленных подвижных, связанных между собой, и неподвижних клиньев, при этом подвижные клинья имеют возможность возвратно-поступательного перемещения под действием гидроцилиндров одностороннего действия, кинематически связанных с первым и последним подвижными клиньями. Механизм передвижки выполнен в виде гидроцилиндра, расположенного под днищем желоба рабочего органа, и цепи, закрепляемой на опережающем погрузочную машину анкере в момент передвижки.
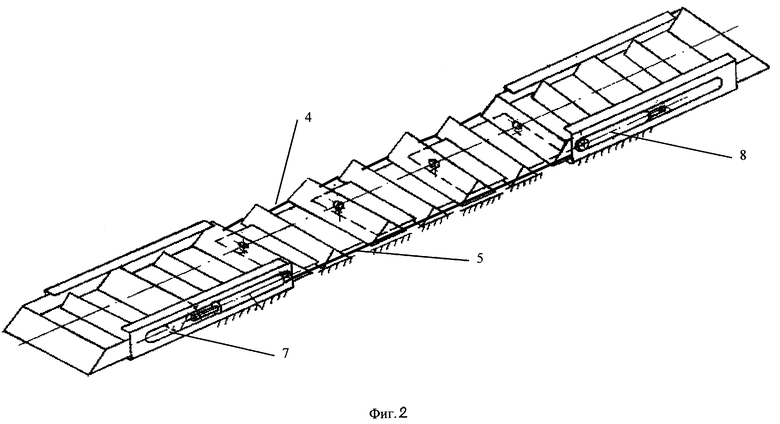
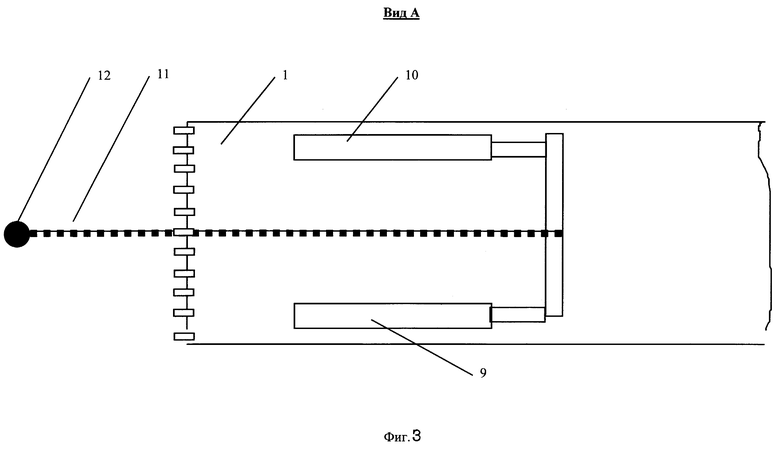
Сущность изобретения поясняется чертежами, где на фиг. 1 представлена погрузочная машина; на фиг. 2 - кинематическая схема погрузочной машины; на фиг. 3 представлен механизм передвижки погрузочной машины в начальный момент перемещения.
Рабочий орган погрузочной машины содержит U-образный желоб 1, в котором установлен исполнительный элемент, и перегрузочный конвейер 2. Исполнительный элемент выполнен в виде поочередно установленных подвижных 3, связанных между собой тягами 4 и 5, и неподвижных 6 клиньев, при этом подвижные клинья имеют возможность возвратно-поступательного перемещения под действием гидроцилиндров 7 в 8 одностороннего действия, кинематически связанных с первым и последним подвижными клиньями.
Механизм передвижки выполнен в виде гидроцилиндров 9 и 10, расположенных под днищем желоба 1 рабочего органа, и цепи 11, закрепляемой на опережающем погрузочную машину анкере 12 в момент передвижки.
Погрузочная машина работает следующим образом.
В начальный момент при работе гидроцилиндра одностороннего действия 7 подвижные клинья 3 внедряются в штабель, часть материала пересыпается через клинья 3. При внедрении подвижных клиньев 3, материал, находящийся в желобе 1 от предыдущих черпании, удерживается от выдавливания вертикальными гранями неподвижных клиньев 6.
При транспортировании материала, при работе гидроцилиндра одностороннего действия 8 подвижные клинья 3 вертикальными гранями перемещают материал, поданный в предыдущие циклы, при этом часть материала пересыпается через неподвижные клинья 6. При достижении подвижных клиньев исходного состояния (перед внедрением) цикл повторяется.
Для перемещения погрузочной машины (фиг. З) перед рабочим органом устанавливается анкер 12, на котором закрепляется цепь 11, связанная с гидроцилиндрами передвижки 9 и 10, расположенных под днищем желоба 1 рабочего органа. При работе гидроцилиндров погрузочная машина перемещается к забою.
Использование изобретения позволит повысить эффективность погрузки; работать в таких режимах, когда штабель формируется непосредственно на рабочем органе погрузочной машины. В горной промышленности это позволит помимо прочего начать уборку штабеля до окончания времени проветривання выработки.
| название | год | авторы | номер документа |
|---|---|---|---|
| РАБОЧИЙ ОРГАН ПОГРУЗОЧНОЙ МАШИНЫ | 1997 |
|
RU2133213C1 |
| РАБОЧИЙ ОРГАН ПОГРУЗОЧНОЙ МАШИНЫ | 1997 |
|
RU2137693C1 |
| ПРОХОДЧЕСКИЙ АГРЕГАТ | 1998 |
|
RU2144138C1 |
| ПОГРУЗОЧНАЯ МАШИНА | 1995 |
|
RU2097569C1 |
| СИСТЕМА ГОРНОПРОХОДЧЕСКИХ МАШИН | 1997 |
|
RU2144139C1 |
| КОНВЕЙЕР ДЛЯ ТРАНСПОРТИРОВАНИЯ СЫПУЧИХ И КУСКОВЫХ МАТЕРИАЛОВ | 1996 |
|
RU2108954C1 |
| КОНВЕЙЕР ДЛЯ ТРАНСПОРТИРОВАНИЯ СЫПУЧИХ И КУСКОВЫХ МАТЕРИАЛОВ | 1996 |
|
RU2108955C1 |
| КОНВЕЙЕР ДЛЯ ТРАНСПОРТИРОВАНИЯ СЫПУЧИХ И КУСКОВЫХ МАТЕРИАЛОВ | 1996 |
|
RU2102304C1 |
| МНОГОГРЕБКОВЫЙ ПОГРУЗОЧНЫЙ ОРГАН | 1996 |
|
RU2112145C1 |
| КОМПЛЕКС ДЛЯ РЕМОНТА ГОРНЫХ ВЫРАБОТОК | 1995 |
|
RU2098632C1 |
Изобретение относится к машинам для погрузки крепкого крупнокускового материала. Погрузочная машина содержит механизм передвижки, последовательно расположенные рабочий орган, выполненный в виде U-образного желоба с исполнительным элементом в виде клина, имеющего возможность возвратно-поступательного движения под действием гидроцилиндров, и перегрузочный конвейер. Исполнительный элемент погрузочной машины выполнен в виде поочередно установленных подвижных, связанных между собой, и неподвижных клиньев, при этом подвижные клинья имеют возможность возвратно-поступательного перемещения под действием гидроцилиндров одностороннего действия, кинематически связанных с первым и последним подвижными клиньями. Механизм передвижки выполнен в виде гидроцилиндра, расположенного под днищем желоба рабочего органа, и цепи, закрепляемой на опережающем погрузочную машину анкере в момент передвижки. Использование изобретения позволит повысить эффективность погрузки: работать в таких режимах, когда штабель формируется непосредственно на рабочем органе погрузочной машины. В горной промышленности это позволит помимо прочего начать уборку штабеля до окончания времени проветривания выработки. 3 ил.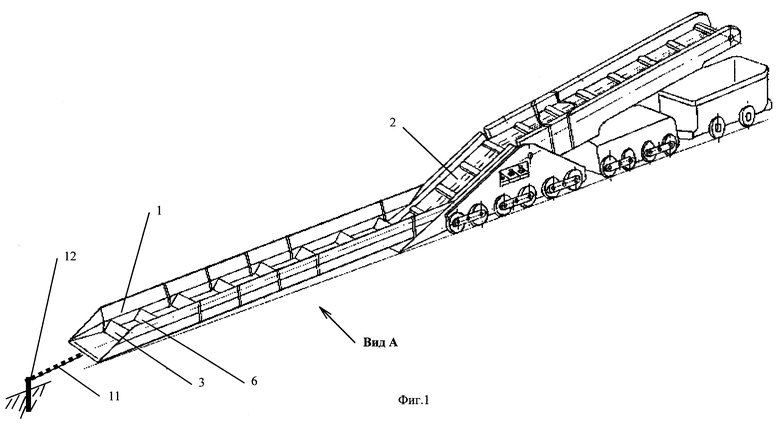
Погрузочная машина, имеющая механизм передвижки и последовательно расположенные рабочий орган, выполненный в виде U-образного желоба с установленным в нем исполнительным элементом, и перегрузочный конвейер, отличающаяся тем, что исполнительный элемент выполнен в виде поочередно установленных подвижных, связанных между собой, и неподвижных клиньев, при этом подвижные клинья имеют возможность возвратно-поступательного перемещения под действием гидроцилиндров одностороннего действия, кинематически связанных с первым и последним подвижными клиньями, механизм передвижки выполнен в виде гидроцилиндра, расположенного под днищем желоба рабочего органа, и цепи, закрепляемой на опережающем погрузочную машину анкере в момент передвижки.
| Погрузочная машина | 1989 |
|
SU1678724A2 |
| Погрузочная машина | 1978 |
|
SU870311A1 |
| US 4878802 A, 07.11.89 | |||
| US 5123520 A, 23.06.92. | |||
