Изобретение относится к горному машиностроению, а именно к погрузочным машинам.
Известная погрузочная машина непрерывного действия с саморегулируемой скоростью подачи [1] Привод данной погрузочной машины состоит из асинхронного двигателя и двухдифференциального редуктора. Передача крутящего момента на ходовой механизм, исполнительный орган и погрузочный конвейер осуществляется от соответствующих звеньев дифференциального редуктора через механические передачи.
Применение двухдифференциального редуктора позволило связать кинематически механические передачи ходового механизма и исполнительного органа таким образом, что изменение момента сопротивления на исполнительном органе вызывало пропорциональное изменение скорости подачи машины на забой.
Однако для данного устройства характерными являются применение силового способа регулирования в управляющих механизмах привода и сложность компоновочной увязки исполнительных механизмов с механическим дифференциалом.
Наиболее близкой к заявляемому объекту по технической сущности и достигаемому результату является погрузочная машина, включающая исполнительный орган непрерывного действия, погрузочный конвейер, ходовую часть, управляющий элемент, регулируемые дроссели, гидромоторы привода ходовой части, соединенные с насосом параллельно, гидромотор привода исполнительного органа, в сливной магистрали которого установлен регулируемый дроссель [2]
Регулирование скорости подачи на забой в зависимости на нагрузки на исполнительном органе обеспечивается тем, что два гидромотора привода ходовой части соединены с насосом параллельно, а их выходные валы связаны между собой дифференциальным редуктором, причем сливная магистраль одного из гидромоторов привода ходовой части последовательно соединена с гидромотором привода нагребающих лап.
Недостатком данной конструкции является то, что такая схема также значительно усложняет компоновочную увязку исполнительных механизмов с механическим дифференциалом, приводит к значительному увеличению установленной суммарной мощности гидромоторов и снижает значения КПД привода за счет того, что довольно большая часть мощности одного из гидромоторов привода ходовой части на рабочих режимах используется на регулирование скорости подачи, а также не обеспечивается саморегулирование скорости подачи машины в зависимости от нагрузки на исполнительном органе.
Заявляемое техническое решение направлено на повышение надежности работы погрузочной машины, упрощение ее конструкции и саморегулирование скорости ее подачи на забой в зависимости от нагрузки на исполнительном органе.
Сравнение заявляемого решения с другими разработками показывает, что аналогичные конструкции машин известны [1, 2] однако оно обладает следующими существенными отличительными признаками:
1. В напорную магистраль гидромоторов привода ходовой части последовательно включены регулировочный клапан и два золотника, причем параллельно первому из них включен регулируемый дроссель, что позволяет повысить управляемость работой машины и обеспечить независимую работу механизмов ходовой части и исполнительного органа;
2. Управляющие магистрали золотников и регулировочный клапан связаны с напорной магистралью гидромотора привода исполнительного органа. Такая схема взаимосвязи элементов позволяет обеспечить саморегулирование скорости подачи машины в зависимости от нагрузки на исполнительном органе. Тем самым упрощается конструкция машины и повышается ее надежность.
На чертеже представлена принципиальная гидрокинематическая схема погрузочной машины.
Привод погрузочной машины состоит из маслостанции и трех гидромоторов, два из которых 1 и 2 реверсивные, соединены параллельно и представляют собой привод ходового механизма. Гидромотор 3 приводит в движение исполнительный орган и включен параллельно гидросистеме, питающей гидромоторы 1 и 2. Маслостанция включает в себя электродвигатель 4, насос 5, фильтр 6 и предохранительный клапан 7. Последовательно в напорную магистраль питания гидромоторов 1 и 2 включены золотники 8 и 9, каждый из которых в начале работы находится в положении 1. Управляющие магистрали золотников 8,9 включены в напорную магистраль гидромотора 3. Параллельно золотнику 8 установлен регулируемый дроссель 10, который соединен с золотником 9. Подача жидкости к гидромоторам 1,2 осуществляется через регулировочный клапан 11, дроссель 10 (золотник 8); золотник 9 и краны 12,13, предназначенные для выполнения разворота машины при выполнении маневровых операций. Причем пружина регулировочного клапана 11 имеет менее жесткую характеристику, чем пружина золотника 9, а пружина золотника 8 менее жесткую, чем регулировочного клапана 11, а сам клапан 11 также соединен с напорной магистралью гидромотора 3. Для регулирования скорости нагребания материала в сливной магистрали гидромотора 3 установлен регулируемый дроссель 14.
Валы гидромоторов 1,2 непосредственно передают крутящие моменты приводным звездочкам 15 входного механизма. От вала гидромотора 3 осуществляется передача крутящего момента исполнительному органу через конические шестерни 16 и 17, кривошипный диск 18 с эксцентрично расположенным на нем пальцем 19, на правую нагребающую лапу 20 с кулисой, паз которой направляется роликом 21. Через пару конических шестерен 17,22 крутящий момент передается валу 23 и далее коническим шестерням 24 и 25, кривошипному диску 26 с пальцем 27 левой нагребающей лапе 28 с кулисой. Паз кулисы направляется роликом 29.
Передача крутящего момента погрузочному конвейеру осуществляется от электродвигателя 30 через пару конических колес 31 и 32, пару цилиндрических колес 33 и 34 на ведущую звездочку 35 конвейера.
Погрузочная машина работает следующим образом.
При включении гидронасоса постоянной производительности и подаче жидкости в напорные магистрали гидромоторов 1 3 осуществляются движение нагребающих лап 20, 28 и подача машины на забой, скорости которых определяются настройкой дросселей 14 и 10 соответственно. Золотник 8 при этом остается в позиции 1 (выключенное положение), поток жидкости через клапан 11 и дроссель 10 проходит к золотнику 9, а от него к гидромоторам 1, 2. Давление в напорной магистрали гидродвигателя 3 остается на низком уровне до тех пор, пока нагребающие лапы 20, 28 не соприкоснутся с нагребающим материалом (при этом давление в напорной магистрали гидромотора 3 повышается). При достижении давления, определяемого настройкой пружины золотника 8, происходят его переключение в позицию 11 (его открытие), установление расчетной скорости подачи погрузочной машины и движения нагребающих лап 20,28. Если эти скорости выбраны правильно (настройкой дросселей 10 и 14), т.е. в соответствии с объемом погружаемого материала, то работа машины будет происходить без перегрузок.
По мере внедрения нагребающих лап 20,28 в штабель погружаемого материала ими воспринимается все более увеличивающийся момент сопротивления внедрению, а значит происходит рост давления в напорной магистрали гидромотора 3. При достижении этим давлением величины, превышающей настройку пружины регулировочного клапана 11, произойдет его срабатывание, уменьшение проходного сечения (ввод в напорную магистраль питания гидромоторов 1,2 дополнительного сопротивления), снижение количества пропускаемой жидкости и, следовательно, уменьшение скорости подачи машины на забой. Если это снижение скорости не приведет к падению давления в напорной магистрали гидромотора 3, т.е. к нормализации режима работы машины, то золотник 9 при дальнейшем повышении давления переключится в позицию 11, изменится направление подачи жидкости и вращения гидромоторов 1,2 и машина начнет отходить от забоя.
При уменьшении давления в напорной магистрали гидромотора 3, характерном для нормального режима работы машины, под действием пружины золотник 9 снова вернется в позицию 1 и будет осуществляться подача погрузочной машины на забой с расчетной скоростью.
Для описываемой погрузочной машины характерно быстродействие системы управления, так как замена механических передач элементами гидропривода позволяет снизить инерционность ее звеньев и всей системы управления в целом.
Применение описываемой конструкции позволит упростить конструкцию всей машины, применить безредукторную систему привода ходового механизма (мотор - колесо), выполнить компоновку машины исходя только из удобства расположения и функционального назначения исполнительных органов самой машины, снизить суммарную установленную мощность гидромотора, повысить надежность машины в целом и отдельных ее элементов, а также повысить быстродействие всей системы и относится к разряду адаптивных схем, так как имеет место обратная связь по давлению жидкости и саморегулированию режима работы машины без дополнительно устанавливаемой системы управления.
| название | год | авторы | номер документа |
|---|---|---|---|
| АДАПТИВНАЯ СИСТЕМА ГИДРОПРИВОДА МЕХАНИЗМА ПОДАЧИ ОЧИСТНОГО КОМБАЙНА | 1996 |
|
RU2098621C1 |
| Погрузочная машина | 1975 |
|
SU600307A1 |
| МНОГОГРЕБКОВЫЙ ПОГРУЗОЧНЫЙ ОРГАН | 1996 |
|
RU2112145C1 |
| КОМПЛЕКС ДЛЯ РЕМОНТА ГОРНЫХ ВЫРАБОТОК | 1995 |
|
RU2098632C1 |
| ПРОХОДЧЕСКИЙ АГРЕГАТ | 1998 |
|
RU2144138C1 |
| ПРОХОДЧЕСКИЙ КОМБАЙН | 1997 |
|
RU2131030C1 |
| ПОГРУЗОЧНАЯ МАШИНА | 1998 |
|
RU2137694C1 |
| КРЕПЕУСТАНОВЩИК | 1995 |
|
RU2078935C1 |
| БУРОКРЕПЕЗАЧИСТНОЙ МОДУЛЬ | 1994 |
|
RU2079663C1 |
| АДАПТИВНАЯ ЩЕКОВАЯ ДРОБИЛКА | 1996 |
|
RU2112596C1 |
Использование, изобретение относится к горному машиностроению, а именно к погрузочным машинам. Сущность изобретения: погрузочная машина содержит маслостанцию, исполнительный орган непрерывного действия, погрузочные конвейер, ходовую часть, гидромоторы привода ходовой части, соединенные с насосом параллельно, и гидромотор привода исполнительного органа. В напорную магистраль гидроприводов привода ходовой части последовательно включены регулировочный клапан и золотники, причем параллельно золотнику установлен регулируемый дроссель, а управляющие магистрали золотников и регулировочный клапан соединены с напорной магистралью гидромотора привода исполнительного органа. Применение изобретения позволяет упростить конструкцию погрузочной машины, выполнить более компактное размещение ее узлов и деталей, а также повысить надежность и быстродействие работы. 1 ил.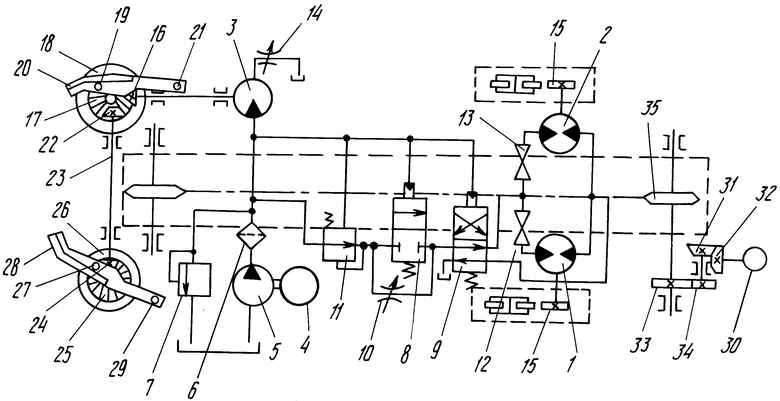
Погрузочная машина, включающая маслостанцию, исполнительный орган непрерывного действия, погрузочный конвейер, ходовую часть, гидромоторы привода ходовой части, соединенные с насосом параллельно, гидромотор привода исполнительного органа, в сливной магистрали которого установлен регулируемый дроссель, отличающаяся тем, что в напорную магистраль гидромоторов привода ходовой части последовательно включены регулировочный клапан и два золотника, причем параллельно первому золотнику включен регулируемый дроссель, а гидролинии управления золотниками и регулировочный клапан соединены с напорной магистралью гидромотора привода исполнительного органа.
| SU, авторское свидетельство, 420793, кл | |||
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| SU, авторское свидетельство, 404948, кл | |||
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
