Изобретение относится к устройствам определения состояния, сохранности перевозимых грузов, а также их габаритности.
Известен способ дистанционного контроля сохранности грузов на железной дороге [1], заключающийся в получении телевизионного изображения внешнего вида подвижного состава на входе в парк прибытия, записи этого изображения и распознавании отклонения образа наблюдаемого объекта от эталонного образца изображения, полученного ранее при выходе из парка отправления и переданного в парк прибытия до прихода наблюдаемого объекта.
Недостаток способа в том, что он не позволяет определить состояние груза внутри вагона или цистерны, обнаружить его пропажу или смещение, что чрезвычайно важно для безопасности движения.
Известно устройство для контроля негабаритности грузов на подвижном составе [2] (а.с. №432028, 1972), содержащее вертикальные стойки с поворотными элементами, образующими контур габарита погрузки и установленными независимо друг от друга и снабжены датчиками угла поворота, которые электрически соединены с блоком электронной обработки сигналов и механическими компенсаторами, состоящими из щарнирно закрепленных корпусов.
Недостаток устройства в том, что контакт с негабаритным грузом происходит механически, с ударом. Это ограничивает скорость контролируемого поезда. Кроме того, устройство не позволяет определить состояние груза внутри вагона.
Известна система дистанционного контроля за коммерческими неисправностями на подвижном составе [3], содержащая датчик начала состава и П-образную несущую конструкцию, установленную над рельсовым путем, телекамеру крыши вагона, закрепленную на перекладине несущей конструкции, датчик счета вагонов, закрепленный на вертикальных опорах несущей конструкции, выходы датчиков связаны через блок индикации и согласования с входом системного блока автоматизированного рабочего места, отличающаяся тем, что в нее введены прожекторы, закрепленные на несущей конструкции, телекамера левого борта вагона и телекамера правого борта вагона, закрепленные на вертикальных опорах несущей конструкции, и датчик счета колес, при этом датчик начала состава и датчик счета колес закреплены на вертикальных опорах несущей конструкции, выход датчика счета колес связан через блок индикации и согласования с входом системного блока автоматизированного рабочего места, выходы всех телекамер связаны с соответствующими видеовходами системного блока автоматизированного рабочего места, который выполнен с возможностью вывода на экран компьютерного монитора в реальном масштабе времени видеоизображения проходящего состава одновременно с трех телекамер в режиме "ПОЛИЭКРАН", а также полноэкранного просмотра состава с одной выбранной телекамеры, записи на жесткий диск сжатого видеоизображения с трех телевизионных камер, воспроизведения видеозаписи и создания видеоархива.
Известен способ дистанционного контроля габаритов грузов, погруженных на подвижной состав, в процессе их движения [4], включающий контроль соблюдения границ габаритности погрузки при входе состава в зону контроля с помощью оптоэлектронных датчиков и определение негабаритности грузов, отличающийся тем, что определяют границы совмещенного зонального габарита погрузки и габарита подвижного состава при очертании бокового габарита погрузки по габариту подвижного состава и устанавливают оптоэлектронные датчики на указанных границах.
Данный способ реализует система электронных габаритных ворот для дистанционного контроля габаритов грузов, погруженных на подвижной состав [4], в процессе их движения для осуществления данного способа, содержащая оптоэлектронный датчик определения начала состава и П-образную несущую конструкцию, установленную над рельсовым путем, на которой размещены пять оптоэлектронных датчиков контроля габаритности погрузки и оптоэлектронный датчик счета вагонов, выходы всех оптоэлектронных датчиков связаны с входом блока индикации и согласования, выход которого связан с персональной электронной вычислительной машиной оператора, отличающаяся тем, что она дополнительно снабжена четырьмя оптоэлектронными датчиками контроля габаритности погрузки, которые установлены по CL RU 2249523 C11С 3259422 UR границам совмещенного зонального габарита погрузки и габарита подвижного состава при очертании бокового габарита погрузки по габариту подвижного состава, и оптоэлектронным датчиком счета колесных пар, расположенным на П-образной конструкции, при этом оптоэлектронный датчик определения начала состава также расположен на П-образной конструкции, а блок индикации и согласования выполнен с возможностью работы в автономном режиме.
Недостаток данного технического решения в отсутствии возможности одновременно определить состояние подвижного состава и груза.
Известна автоматизированная система коммерческого осмотра поездов и вагонов [5], содержащая оптоэлектронный датчик начала состава и установленную над рельсовым путем П-образную несущую конструкцию, на которой размещены телевизионная камера, предназначенная для получения изображения крыши вагонов, пять оптоэлектронных датчиков контроля габаритности погрузки вагонов, оптоэлектронный датчик счета вагонов, при этом выходы датчиков связаны с входами блока индикации и согласования, выход блока индикации и согласования связан с входом персональной электронной вычислительной машины (ПЭВМ) автоматизированного рабочего места оператора, к выходу которой подключен монитор, отличающаяся тем, что в нее введены четыре дополнительных оптоэлектронных датчика контроля габаритности погрузки вагонов, оптоэлектронный датчик счета колесных пар, три дополнительные телевизионные камеры, предназначенные для получения изображений левого и правого бортов вагонов, а также контроля пломб люков цистерн, и прожекторы, при этом дополнительные датчики контроля габаритности погрузки вагонов установлены на несущей конструкции с возможностью контроля совместно с остальными аналогичными датчиками границ совмещенного зонального габарита погрузки и габарита подвижного состава, оптоэлектронный датчик начала состава, оптоэлектронный датчик счета колесных пар, телевизионные камеры левого и правого бортов вагонов закреплены на опорах, телевизионная камера контроля пломб люков цистерн - на ригеле, а прожекторы - на опорах CL RU 2252170 С11С 0712522 UR и ригеле несущей конструкции, выходы всех телевизионных камер связаны с видеовходами ПЭВМ, выходы дополнительных датчиков контроля габаритности погрузки вагонов и датчика счета колесных пар связаны с соответствующими входами блока индикации и согласования, подключенного управляющим входом к выходу ПЭВМ, блок индикации и согласования выполнен с возможностью работы в автономном режиме.
Недостаток упомянутых устройств в том, что они выявляют только внешние нарушения и не могут обнаружить скрытые дефекты погрузки, например смещение груза внутри вагона, а также определить факт хищения груза. Нельзя с помощью их обнаружить нарушение технического состояния подвижного состава, например определить температуру нагретых букс, скрытый очаг возгорания и т.п.
Однако по своей технической сущности последнее упомянутое устройство наиболее близко к предлагаемому и может служить в качестве прототипа.
Задачей предлагаемого устройства является возможность выявление состояния груза, (как наливного, так и сыпучего), его смещения, обнаружение его исчезновения, температуру нагрева груза и элементов подвижного состава (перегрев букс), течи в цистернах для жидкого груза, наличие теплового излучения внутри вагона, например обнаружение скрытых очагов возгорания, наличие людей и животных и т.п.
Поставленная задача решается следующим образом. В створе габаритных ворот дополнительно к имеющемуся оборудованию в виде телевизионных камер, оптоэлектронных датчиков габарита, счетчика вагонов устанавливают, по крайне мере одну, тепловизионную установку, поле зрения которой совпадает с одной из телекамер, получают контурное телевизионное изображение единицы подвижного состава (вагона, цистерны), сравнивают его с контурами стандартных известных единиц подвижного состава с полученным контурным изображением, идентифицируют полученное изображение. Получают тепловизионное изображение вагона в разных ракурсах, совпадающих с ракурсами телевизионных камер, которое выводят на экран видеомонитора, работающего в режиме "полиэкран", где сопоставляют с ранее полученным телевизионным изображением и стандартным контурным телевизионным изображением. Видеоизображение привязывают к координатам исследуемого вагона. На экран монитора выводят изображение железнодорожных габаритов с указанием запретных зон.
Описанный способ реализует система комплексного дистанционного контроля состояния, сохранности и габаритности грузов, перевозимых железнодорожным транспортом, содержащая габаритные ворота, оборудованные оптоэлектронными датчиками габаритов, телевизионными камерами наблюдения, датчиком начала состава и несущую конструкцию, установленную над рельсовым путем, датчик счета вагонов, выходы датчиков связаны через блок индикации и согласования с входом системного блока автоматизированного рабочего места, выходы всех телекамер связаны с соответствующими видеовходами системного блока автоматизированного рабочего места, который выполнен с возможностью вывода на экран компьютерного монитора в реальном масштабе времени видеоизображения проходящего состава одновременно со всех телекамер в режиме "ПОЛИЭКРАН", а также полноэкранного просмотра состава с одной выбранной телекамеры, записи на жесткий диск сжатого видеоизображения со всех телевизионных камер, воспроизведения видеозаписи и создания видеоархива. На несущей конструкции дополнительно установлена, по крайней мере, одна тепловизионная установка, поле зрения которой охватывает исследуемый объект - единицу железнодорожного состава (вагон, цистерна, платформа) и совпадает с полем зрения соседней телекамеры, тепловизионная установка соединена линией связи с входом системного блока автоматизированного рабочего места с возможностью получения контурных телевизионных изображений исследуемого объекта, его стандартного аналога, отобранного из базы данных компьютера, и тепловизионного изображения объекта, с возможностью их сопоставления.
Тепловизионные установки размещены справа, слева и сверху от исследуемого объекта, поля зрения их совмещены с полями зрения соответствующих соседних телекамер.
Излучатели соответствующих оптоэлектронных датчиков направлены в объектив тепловизионной установки с возможностью установления оптической связи частью их светового потока. На практике оператор на экране монитора видит светящуюся точку, которая в нормальном состоянии не должна закрываться какими либо элементами движущегося состава.
Тепловизионной съемкой определяют контуры груза, размещенного внутри вагона (цистерны) и, сравнивая их с контурами полезных объемов в подвижном составе, предназначенными для груза, судят о состоянии груза, степени смещения его центра масс и нарушении габаритности, выявляют наличие зон повышенной температуры, обнаруживают несанкционированное присутствие людей и животных на подвижном составе, определяют наличие течи в цистернах для жидкого груза, а также его уровень в цистерне.
На чертеже изображена схема установки.
Устройство содержит габаритные ворота 1, оборудованные оптоэлектронными датчиками 2 габаритов, телевизионными камерами наблюдения 3, датчиком 4 начала состава, и несущую конструкцию 5, установленную над рельсовым путем, датчик 6 счета вагонов, выходы датчиков 2, 4, 6 связаны через блок 7 индикации и согласования с входом системного блока 8 автоматизированного рабочего места 9, выходы всех телекамер 3 связаны с соответствующими видеовходами системного блока 8 автоматизированного рабочего места 9, который выполнен с возможностью вывода на экран 10 компьютерного монитора в реальном масштабе времени видеоизображения проходящего состава одновременно со всех телекамер 3 в режиме "ПОЛИЭКРАН." На несущей конструкции 5 дополнительно установлена, по крайней мере, одна тепловизионная установка 11, поле зрения которой направлено на исследуемый объект - единицу железнодорожного состава (вагон, цистерна, платформа) и совпадает с полем зрения соседней телекамеры 3, тепловизионная установка 11 соединена линией связи с входом системного блока 8 автоматизированного рабочего места 9 с возможностью получения совмещенных контурных телевизионных изображений исследуемого объекта, его стандартного аналога, отобранного из базы данных компьютера 12, и тепловизионного изображения объекта. Тепловизионные установки 11 размещены попарно с соседними телевизионными камерами 3 справа, слева и сверху от исследуемого объекта, поля зрения их совмещены с полями зрения соответствующих соседних телекамер 3. Излучатели 13 соответствующих оптоэлектронных датчиков 2 частично направлены в объектив тепловизионной установки 11 с возможностью установления оптической связи частью их светового потока.
Устройство работает следующим образом. При движении железнодорожного состава через габаритные ворота 1 сначала отмечают начало состава с помощью датчика 4, далее датчиком 6 ведут счет вагонов, определяя порядковый номер каждого вагона, с помощью телекамер 3 получают телевизионное изображение внешней поверхности железнодорожного состава, идентифицируют его, с помощью тепловизионной установки 11 получают тепловизионное изображение внутреннего содержания каждого вагона, извлекают из базы данных контурное стандартное изображение исследуемого вагона, определяют тип, марку, модель единицы подвижного состава, сопоставляют полученные изображения на экране 10 видеомонитора, визуально оценивают состояние груза, его сохранность и габариты погрузки, производят запись изображений на жесткий диск компьютера 12 и в случае обнаружения нарушений фиксируют последние. Тепловизионные установки 11 установлены таким образом, чтобы часть светового потока от излучателей 13 оптоэлектронных датчиков 2 попадала в их поле зрения. Наблюдая изображение излучателей 13, дублируют работу оптоэлектронных датчиков, увеличивая вероятность обнаружения негабаритности и снижая вероятность ложного срабатывания. Кроме того, изучая тепловизионные изображения можно обнаружить уровень налива цистерн, течи в их корпусах, которые обнаруживают себя местным понижением температуры и видны на тепловизионном изображении в виде пятен другого цвета, отличного от общего фона. Эти факты тоже фиксируются.
Заявителем изготовлено опытное оборудование, испытание которого подтвердило заявленные возможности.
Источники информации
1. Патент №2138077, 1997. Способ дистанционного контроля сохранности грузов
2. А.с. №432028, 1972. Устройство для контроля негабаритности на подвижном составе.
3. Заявка №2003108406, 2003. Способ дистанционного контроля за коммерческими неисправностями.
4. 3аявка №2004119031, 2004. Способ дистанционного контроля габаритов грузов.
5. 3аявка №2004119032, 2004. Автоматизированная система коммерческого осмотра поездов и вагонов (АСКО ПВ) (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ И СИСТЕМА ДИСТАНЦИОННОГО КОНТРОЛЯ НЕГАБАРИТНОСТИ ГРУЗОВ НА ПОДВИЖНОМ СОСТАВЕ ЖЕЛЕЗНОДОРОЖНОГО ТРАНСПОРТА | 2006 |
|
RU2311311C2 |
| Автоматизированная система коммерческого осмотра поездов и вагонов с модульной архитектурой (АСКО ПВ 3.0) | 2018 |
|
RU2713132C1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ВАГОНОВ | 2009 |
|
RU2410263C1 |
| АВТОМАТИЗИРОВАННАЯ СИСТЕМА КОММЕРЧЕСКОГО ОСМОТРА ПОЕЗДОВ И ВАГОНОВ (АСКО ПВ) | 2004 |
|
RU2252170C1 |
| Автоматизированная система коммерческого осмотра поездов и вагонов | 2018 |
|
RU2682148C1 |
| СПОСОБ ДИСТАНЦИОННОГО КОНТРОЛЯ ЗА КОММЕРЧЕСКИМИ НЕИСПРАВНОСТЯМИ НА ПОДВИЖНОМ СОСТАВЕ | 2003 |
|
RU2252886C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ЗОН И СТЕПЕНЕЙ НЕГАБАРИТНОСТИ ГРУЗОВ НА ОТКРЫТОМ ПОДВИЖНОМ СОСТАВЕ С ПОМОЩЬЮ ТЕЛЕВИЗИОННЫХ ИЗОБРАЖЕНИЙ | 2008 |
|
RU2355595C1 |
| АВТОМАТИЗИРОВАННАЯ СИСТЕМА КОММЕРЧЕСКОГО ОСМОТРА 3D КОНТРОЛЬ | 2019 |
|
RU2718769C1 |
| Автоматизированное контрольно-габаритное устройство для контроля подвижных железнодорожных составов | 2020 |
|
RU2735809C1 |
| СПОСОБ ДИСТАНЦИОННОГО КОНТРОЛЯ СОСТОЯНИЯ ВАГОНОВ В СОСТАВЕ ПОЕЗДА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2009 |
|
RU2408487C1 |
Изобретение относится к устройствам определения состояния, сохранности перевозимых грузов, а также их габаритности. Способ включает получение телевизионного изображения наружной поверхности подвижного состава, контроль соблюдения границ габаритности погрузки при проходе состава через зону контроля габаритных ворот. Также получают тепловизионное изображение каждой единицы подвижного состава и перевозимого ей груза в разных ракурсах, совпадающих с ракурсами телевизионных изображений, например, с боковых сторон и сверху. Из полученного телевизионного изображения выделяют его контурное изображение, идентифицируют тип данной единицы подвижного состава, сравнивая полученное ее контурное телевизионное изображение с ее известным стандартным телевизионным изображением, хранящимся в базе данных компьютера автоматизированного рабочего места, и с полученным тепловизионным изображением путем сопоставления их масштабных изображений. Положение и уровень груза внутри вагона определяют по сопоставлению тепловизионного и телевизионного контурного изображений. Полученные данные сверяют с натурным листом и затем судят о состоянии, габаритности и сохранности груза. Система содержит габаритные ворота, оборудованные оптоэлектронными датчиками, телевизионными камерами, датчиком начала составами несущую конструкцию, на которой установлена тепловизионная установка. Техническим результатом является расширение функциональных возможностей. 2 н. и 3 з.п. ф-лы, 1 ил.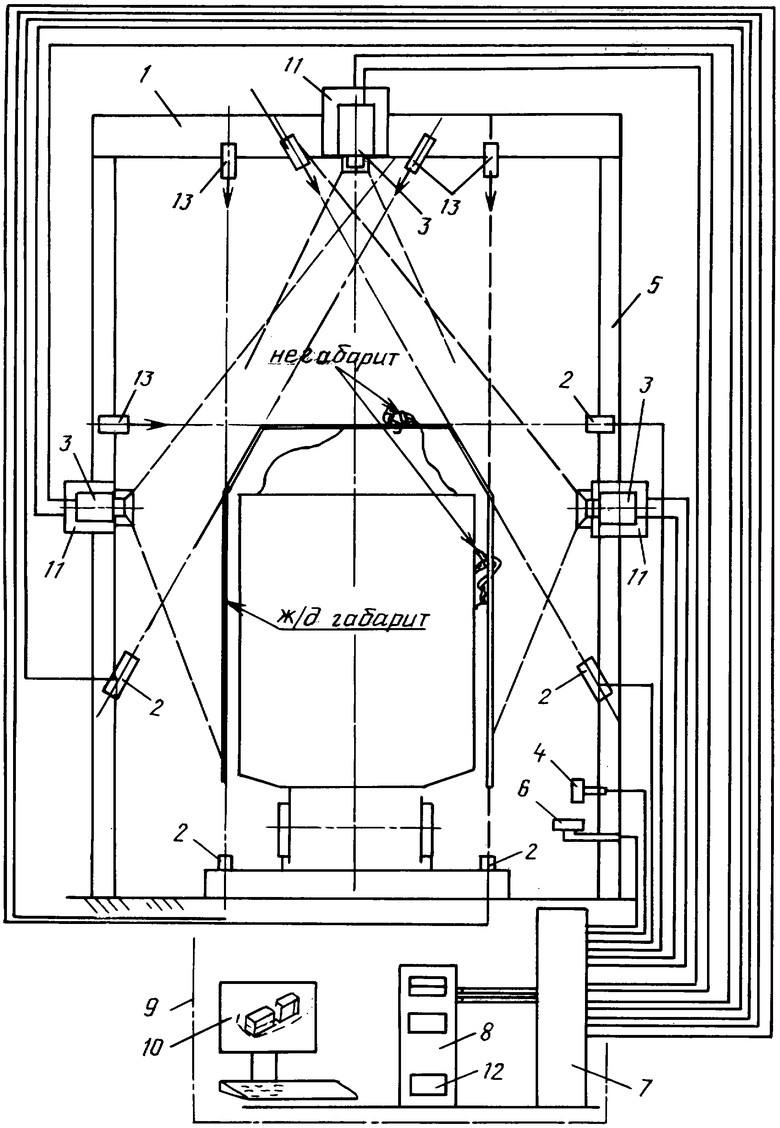
| АВТОМАТИЗИРОВАННАЯ СИСТЕМА КОММЕРЧЕСКОГО ОСМОТРА ПОЕЗДОВ И ВАГОНОВ (АСКО ПВ) | 2004 |
|
RU2252170C1 |
| СПОСОБ ДИСТАНЦИОННОГО КОНТРОЛЯ ГАБАРИТОВ ГРУЗОВ, ПОГРУЖЕННЫХ НА ПОДВИЖНОЙ СОСТАВ, В ПРОЦЕССЕ ИХ ДВИЖЕНИЯ И СИСТЕМА ЭЛЕКТРОННЫХ ГАБАРИТНЫХ ВОРОТ ДЛЯ ДИСТАНЦИОННОГО КОНТРОЛЯ ГАБАРИТОВ ГРУЗОВ, ПОГРУЖЕННЫХ НА ПОДВИЖНОЙ СОСТАВ, В ПРОЦЕССЕ ИХ ДВИЖЕНИЯ | 2004 |
|
RU2249523C1 |
| СПОСОБ ДИСТАНЦИОННОГО КОНТРОЛЯ ЗА КОММЕРЧЕСКИМИ НЕИСПРАВНОСТЯМИ НА ПОДВИЖНОМ СОСТАВЕ | 2003 |
|
RU2252886C2 |
| СПОСОБ ДИСТАНЦИОННОГО КОНТРОЛЯ СОХРАННОСТИ ГРУЗОВ В ЖЕЛЕЗНОДОРОЖНОМ СОСТАВЕ И СИСТЕМА ДИСТАНЦИОННОГО КОНТРОЛЯ СОХРАННОСТИ ГРУЗОВ В ДВИЖУЩЕМСЯ ЖЕЛЕЗНОДОРОЖНОМ СОСТАВЕ | 1997 |
|
RU2138077C1 |
| DE 4015086 А1, 17.01.1991 | |||
| RU 2066282 С1, 10.09.1996. | |||

