Изобретение относится к устройствам определения габаритности перевозимых грузов.
Известно устройство для контроля негабаритности грузов на подвижном составе [1] (а.с. № 432028, 1972), содержащее вертикальные стойки с поворотными элементами, образующими контур габарита погрузки и установленными независимо друг от друга и снабжены датчиками угла поворота, которые электрически соединены с блоком электронной обработки сигналов и механическими компенсаторами, состоящими из шарнирно закрепленных корпусов.
Недостаток устройства в том, что контакт с негабаритным грузом происходит механически, с ударом. Это ограничивает скорость контролируемого поезда.
Известна система дистанционного контроля за коммерческими неисправностями на подвижном составе [2], содержащая датчик начала состава и П-образную несущую конструкцию, установленную над рельсовым путем, телекамеру крыши вагона, закрепленную на перекладине несущей конструкции, датчик счета вагонов, закрепленный на вертикальных опорах несущей конструкции, выходы датчиков связаны через блок индикации и согласования с входом системного блока автоматизированного рабочего места, отличающаяся тем, что в нее введены прожекторы, закрепленные на несущей конструкции, телекамера левого борта вагона и телекамера правого борта вагона, закрепленные на вертикальных опорах несущей конструкции, и датчик счета колес, при этом датчик начала состава и датчик счета колес закреплены на вертикальных опорах несущей конструкции, выход датчика счета колес связан через блок индикации и согласования с входом системного блока автоматизированного рабочего места, выходы всех телекамер связаны с соответствующими видеовходами системного блока автоматизированного рабочего места, который выполнен с возможностью вывода на экран компьютерного монитора в реальном масштабе времени видеоизображения проходящего состава одновременно с трех телекамер в режиме "ПОЛИЭКРАН", а также полноэкранного просмотра состава с одной выбранной телекамеры, записи на жесткий диск сжатого видеоизображения с трех телевизионных камер, воспроизведения видеозаписи и создания видеоархива.
Известен способ дистанционного контроля габаритов грузов, погруженных на подвижной состав, в процессе их движения [3], включающий контроль соблюдения границ габаритности погрузки при входе состава в зону контроля с помощью оптоэлектронных датчиков и определение негабаритности грузов, отличающийся тем, что определяют границы совмещенного зонального габарита погрузки и габарита подвижного состава при очертании бокового габарита погрузки по габариту подвижного состава и устанавливают оптоэлектронные датчики на указанных границах.
Данный способ реализует система электронных габаритных ворот для дистанционного контроля габаритов грузов, погруженных на подвижной состав [3], в процессе их движения для осуществления данного способа, содержащая оптоэлектронный датчик определения начала состава и П-образную несущую конструкцию, установленную над рельсовым путем, на которой размещены пять оптоэлектронных датчиков контроля габаритности погрузки и оптоэлектронный датчик счета вагонов, выходы всех оптоэлектронных датчиков связаны с входом блока индикации и согласования, выход которого связан с персональной электронной вычислительной машиной оператора, отличающаяся тем, что она дополнительно снабжена четырьмя оптоэлектронными датчиками контроля габаритности погрузки, которые установлены по RU 2249523, C1 границам совмещенного зонального габарита погрузки и габарита подвижного состава при очертании бокового габарита погрузки по габариту подвижного состава, и оптоэлектронным датчиком счета колесных пар, расположенным на П-образной конструкции, при этом оптоэлектронный датчик определения начала состава также расположен на П-образной конструкции, а блок индикации и согласования выполнен с возможностью работы в автономном режиме.
Известна автоматизированная система коммерческого осмотра поездов и вагонов [4], содержащая оптоэлектронный датчик начала состава и установленную над рельсовым путем П-образную несущую конструкцию, на которой размещены телевизионная камера, предназначенная для получения изображения крыши вагонов, пять оптоэлектронных датчиков контроля габаритности погрузки вагонов, оптоэлектронный датчик счета вагонов, при этом выходы датчиков связаны с входами блока индикации и согласования, выход блока индикации и согласования связан с входом персональной электронной вычислительной машины (ПЭВМ) автоматизированного рабочего места оператора, к выходу которой подключен монитор, отличающаяся тем, что в нее введены четыре дополнительных оптоэлектронных датчика контроля габаритности погрузки вагонов, оптоэлектронный датчик счета колесных пар, три дополнительных телевизионных камеры, предназначенные для получения изображений левого и правого бортов вагонов, а также контроля пломб люков цистерн и прожекторы, при этом дополнительные датчики контроля габаритности погрузки вагонов установлены на несущей конструкции с возможностью контроля совместно с остальными аналогичными датчиками границ совмещенного зонального габарита погрузки и габарита подвижного состава, оптоэлектронный датчик начала состава, оптоэлектронный датчик счета колесных пар, телевизионные камеры левого и правого бортов вагонов закреплены на опорах, телевизионная камера контроля пломб люков цистерн - на ригеле, а прожекторы - на опорах RU 2252170 С1 и ригеле несущей конструкции, выходы всех телевизионных камер связаны с видеовходами ПЭВМ, выходы дополнительных датчиков контроля габаритности погрузки вагонов и датчика счета колесных пар связаны с соответствующими входами блока индикации и согласования, подключенного управляющим входом к выходу ПЭВМ, блок индикации и согласования выполнен с возможностью работы в автономном режиме.
Недостаток упомянутых устройств в том, что они не позволяют оперативно выявить нарушения габарита в режиме реального времени, не дают указание наблюдающему оператору на нарушение, не акцентируют его внимание. В условиях больших скоростей движения состава, большой утомляемости операторов, наблюдающих однообразную картину движущихся вагонов, велика вероятность пропуска малозаметных, но опасных нарушений габарита. Кроме того, в этих устройствах отсутствует возможность контроля ответной реакции оператора. Велика вероятность ложного срабатывания устройства. Конструкция устройства плохо приспособлена к изменяющимся погодным условиям, ветрам, сезонным изменениям грунта, освещенности и т.д. Однако по своей технической сущности данное изобретение может служить прототипом.
Задачей предлагаемого изобретения является устранение отмеченных недостатков прототипа.
Для решения поставленной задачи предлагается способ дистанционного контроля габаритов груза железнодорожных вагонов, включающий контроль соблюдения границ габаритности погрузки при входе состава в зону контроля с помощью оптоэлектронных датчиков и определение негабаритности грузов, проведении состава через зону контроля, образованную оптическими границами датчиков габаритных ворот, и сравнении габаритов погрузки с габаритами подвижного состава. Его отличительной особенностью является то, что измеряют время Δtп перекрытия оптического канала каждой пары "излучатель - приемник", измеряют скорость поезда Vп и вычисляют длину (протяженность) нарушения габарита по выражению
L=VпΔtп, м,
в блоке приемники излучения устанавливают на расстоянии So, a сопряженные с ними излучатели максимально близко друг от друга, образуя оптические оси, расположенные под углом друг к другу, определяют координаты негабарита по уравнению
Hi=Ho(1-VпΔti/So),
где Hi - расстояние от линии размещения приемников излучения до негабарита, м,
Ho - расстояние от линии установки приемников до излучателей, м,
Δti - промежуток времени между началами процессов перекрытия обоих оптических каналов, мс,
по каналам связи передают информацию о нарушении габаритов, визуализируют ее на экране видеомонитора наблюдения, акцентируют внимание оператора на нарушение с указанием места нарушения на телевизионном изображении единицы подвижного состава, подают тревожный сигнал, регистрируют ответную реакцию оператора.
Реализация способа возможна с помощью системы контроля негабаритности грузов на подвижном составе железнодорожного транспорта, содержащей счетчик вагонов, габаритные ворота, образованные оптическими осями датчиков, содержащих излучатели и приемники, имеющих парную оптическую связь, видеокамеры наблюдения, выходы всех телекамер связаны с соответствующими видеовходами системного блока автоматизированного рабочего места, который выполнен с возможностью вывода на экран компьютерного монитора в реальном масштабе времени видеоизображения проходящего состава с телекамер в режиме "ПОЛИЭКРАН", а также полноэкранного просмотра состава с одной выбранной телекамеры, записи на жесткий диск сжатого видеоизображения с телевизионных камер, воспроизведения видеозаписи и создания видеоархива. Ее отличительной особенностью является то, что излучатели являются источниками когерентного излучения и установлены на опоре, размещенной над железнодорожным путем, а приемники этого излучения для контроля бокового габарита установлены на опоре, жестко соединенной с рельсами железнодорожного пути и имеют угол зрения α, определяемый соотношением
tgα=d/H,
где d - требуемый минимальный размер нарушения габарита, мм,
Н - максимальный вертикальный габарит, мм.
Система снабжена устройством измерения скорости железнодорожного состава. Излучатели и приемники излучения, образуя блок из двух пар, установлены в контролируемой плоскости, причем приемники размещены друг от друга на определенном базовом расстоянии So и направлены на излучатель (излучатели), установленный на расстоянии. Ho от линии установки приемников, при этом оптические оси каждой пары "излучатель - приемник" направлены под утлом друг к другу, приемники излучения соединены каналами связи с вычислительным устройством и видеомонитором наблюдения, снабженным устройствами акцентирования внимания оператора на нарушение, например, визуализации нарушения габарита и подачи тревожного сигнала, а также устройством ответной реакции оператора.
На чертеже изображена схема устройства.
Согласно требованиям железнодорожного стандарта габаритные ворота должны определить нарушение в нескольких продольных плоскостях. Устройство состоит из нескольких контрольных блоков по числу контролируемых плоскостей, в каждый из которых входят две пары "излучатель 1 - приемник 2", размещенных на опорах 3, в частности жестко связанных с рельсами, причем излучатели 1 находятся на опорах выше приемников 2 излучения, последние размещены в контролируемой плоскости на базовом расстоянии So друг от друга, сопряженные с ними излучатели 1 размещены на расстоянии. Но от линии установки приемников 2, образуя условный треугольник из двух оптических осей пар "излучатель 1 - приемник 2" и базой So. Приемники 2 излучения соединены каналами связи 4 с входом системного блока 5 автоматизированного рабочего места 6, снабженного монитором 7. Телевизионные камеры 8 установлены на опоре 3 и также соединены с системным блоком 5 с возможностью записи видеоизображения на его жесткий диск 9 линией связи 10. Система содержит устройство 11 подачи тревожного сигнала, а также снабжена устройством 12 ответной реакции оператора. Кроме того, система содержит счетчик 13 вагонов и измеритель 14 скорости железнодорожного состава.
Устройство работает следующим образом. Железнодорожный состав проходит габаритные ворота, образованные профилем железнодорожного габарита. Сметчиком 13 определяют номер вагона, а измерителем скорости 14 измеряют его скорость. Линии железнодорожного габарита размещены в продольных плоскостях, образованных оптическими осями блоков из двух пар "излучатель - приемник". Предметы, размещенные на вагоне и выступающие за пределы железнодорожного габарита, сначала пересекают луч первой пары "излучатель - приемник" блока, а затем второй. Измеряют время Δtп перекрытия первого приемника 2, затем рассчитывают протяженность негабарита. Измеряют время между началом перекрытия первого и второго приемников 2, а затем рассчитывают расстояние Нi от линии размещения приемников 2 до негабаритного места. Сведения о нем передаются на видеомонитор, где визуализируются, т.е., например, отмечаются другим цветом, указателем или другим способом, акцентируя внимание оператора. Срабатывает устройство 11 подачи тревожного сигнала. Оператор в ответ обязан зафиксировать нарушение нажатием кнопки устройства 12 ответной реакции.
Устройство позволяет определить координаты негабарита, а также уменьшить вероятность ложных срабатываний, т.к. полноценное срабатывание считается, когда сработают оба приемника.
Размещение приемников 2 для определения бокового негабарита на опорах 3 позволяет исключить влияние сезонных изменений грунта на юстировку устройства.
Список использованной литературы
1. Авт.св. № 432028, 1972 Устройство для контроля негабаритности на подвижном составе.
2. Заявка № 2003108406, 2003. Способ дистанционного контроля за коммерческими неисправностями.
3. Заявка № 2004119031, 2004. Способ дистанционного контроля габаритов грузов.
4. Заявка № 2004119032, 2004. Автоматизированная система коммерческого осмотра поездов и вагонов (АСКО ПВ) (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ ЗОН И СТЕПЕНЕЙ НЕГАБАРИТНОСТИ ГРУЗОВ НА ОТКРЫТОМ ПОДВИЖНОМ СОСТАВЕ С ПОМОЩЬЮ ТЕЛЕВИЗИОННЫХ ИЗОБРАЖЕНИЙ | 2008 |
|
RU2355595C1 |
| СПОСОБ И СИСТЕМА КОМПЛЕКСНОГО ДИСТАНЦИОННОГО КОНТРОЛЯ СОСТОЯНИЯ, СОХРАННОСТИ И ГАБАРИТНОСТИ ГРУЗОВ, ПЕРЕВОЗИМЫХ ЖЕЛЕЗНОДОРОЖНЫМ ТРАНСПОРТОМ | 2006 |
|
RU2317907C2 |
| СПОСОБ ДИСТАНЦИОННОГО КОНТРОЛЯ СОСТОЯНИЯ ВАГОНОВ В СОСТАВЕ ПОЕЗДА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2009 |
|
RU2408487C1 |
| АВТОМАТИЗИРОВАННАЯ СИСТЕМА КОММЕРЧЕСКОГО ОСМОТРА ПОЕЗДОВ И ВАГОНОВ (АСКО ПВ) | 2004 |
|
RU2252170C1 |
| Автоматизированное контрольно-габаритное устройство для контроля подвижных железнодорожных составов | 2020 |
|
RU2735809C1 |
| Автоматизированная система коммерческого осмотра поездов и вагонов с модульной архитектурой (АСКО ПВ 3.0) | 2018 |
|
RU2713132C1 |
| Автоматизированная система коммерческого осмотра поездов и вагонов | 2018 |
|
RU2682148C1 |
| СПОСОБ ДИСТАНЦИОННОГО КОНТРОЛЯ ГАБАРИТОВ ГРУЗОВ, ПОГРУЖЕННЫХ НА ПОДВИЖНОЙ СОСТАВ, В ПРОЦЕССЕ ИХ ДВИЖЕНИЯ И СИСТЕМА ЭЛЕКТРОННЫХ ГАБАРИТНЫХ ВОРОТ ДЛЯ ДИСТАНЦИОННОГО КОНТРОЛЯ ГАБАРИТОВ ГРУЗОВ, ПОГРУЖЕННЫХ НА ПОДВИЖНОЙ СОСТАВ, В ПРОЦЕССЕ ИХ ДВИЖЕНИЯ | 2004 |
|
RU2249523C1 |
| АВТОМАТИЗИРОВАННОЕ КОНТРОЛЬНО-ГАБАРИТНОЕ УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ПОДВИЖНЫХ ЖЕЛЕЗНОДОРОЖНЫХ СОСТАВОВ | 2021 |
|
RU2764816C1 |
| АВТОМАТИЗИРОВАННАЯ СИСТЕМА КОММЕРЧЕСКОГО ОСМОТРА 3D КОНТРОЛЬ | 2019 |
|
RU2718769C1 |
Изобретение относится к железнодорожному транспорту, в частности к дистанционному контролю габаритов перевозимого груза на железнодорожном транспорте. Способ включает в себя контроль соблюдения границ габаритности погрузки при входе состава в зону контроля с помощью оптоэлектронных датчиков и определение негабаритности грузов при проведении состава через зону контроля, образованную оптическими границами датчиков габаритных ворот, сравнение габаритов погрузки с требуемыми габаритами подвижного состава и видеонаблюдение проходящего состава. В каждой контролируемой плоскости устанавливают блок из двух пар оптоэлектронных датчиков "излучатель - приемник", измеряют время перекрытия оптического канала, измеряют скорость поезда, вычисляют длину нарушения габарита. Устанавливают, по крайней мере, по два приемника излучения в контролируемой плоскости на расстоянии, а сопряженные с ними излучатели - максимально близко друг от друга, образуя оптические оси, расположенные под углом друг к другу. Определяют координаты негабарита, а по каналам связи передают информацию о нарушении габаритов, визуализируют ее на экране видеомонитора и акцентируют внимание оператора на нарушение, подают тревожный сигнал, регистрируют ответную реакцию оператора. Устройство снабжено устройством измерения скорости, излучателями, приемниками, вычислительным устройством, видеомонитором, а также устройством ответной реакции оператора. Техническим результатом изобретения является повышение надежности. 2 н.п. ф-лы, 1 ил.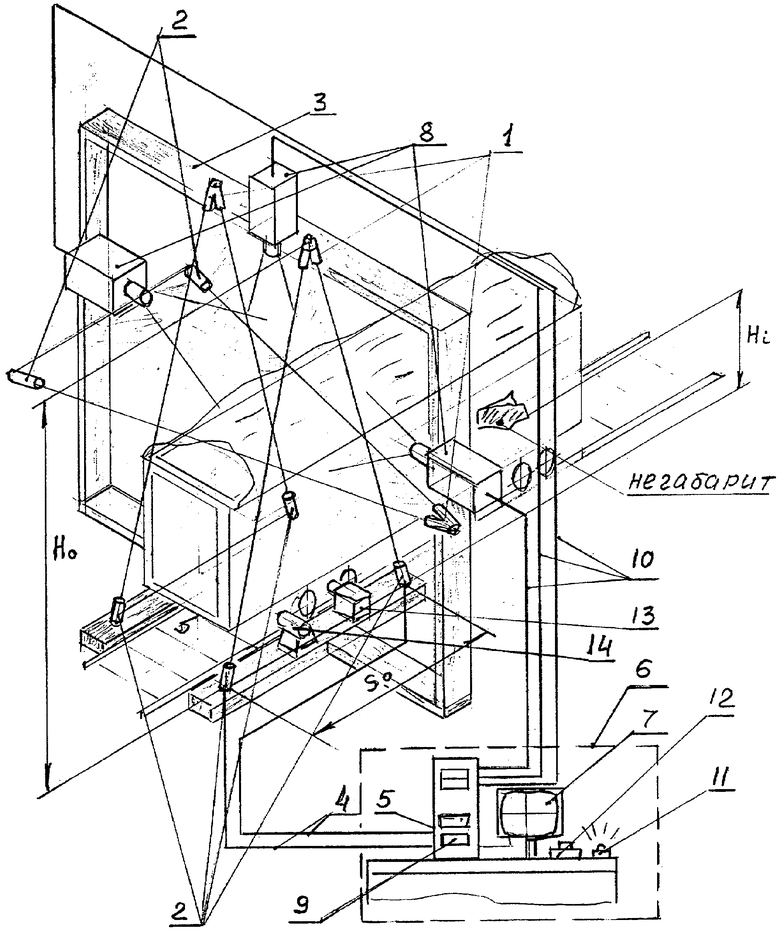
L=VпΔtп, м,
устанавливают, по крайней мере, по два приемника излучения в контролируемой плоскости на расстоянии So, а сопряженные с ними излучатели - максимально близко друг от друга, образуя оптические оси, расположенные под углом друг к другу, определяют координаты негабарита по уравнению
Hi-Ho(1-VпΔti/So),
где Hi - расстояние от линии размещения приемников излучения до негабарита в контролируемой плоскости, м,
Но - расстояние от линии установки приемников до излучателей, м,
Δti - промежуток времени между началами процессов перекрытия обоих оптических каналов, мс,
затем по каналам связи передают информацию о нарушении габаритов, визуализируют ее на экране видеомонитора наблюдения, акцентируют внимание оператора на нарушение с указанием места нарушения на телевизионном изображении единицы подвижного состава, полученном от видеокамер наблюдения, подают тревожный сигнал, регистрируют ответную реакцию оператора.
tgα-d/H,
где d - требуемый минимальный размер нарушения габарита, мм,
Н - максимальный вертикальный габарит, мм,
две пары излучателей и приемников излучения образуют блок, установленный в контролируемой плоскости, причем приемники размещены друг от друга на определенном расстоянии и направлены на излучатели, установленные на расстоянии от линии установки приемников, при этом оптические оси каждой пары "излучатель - приемник" направлены под углом друг к другу, приемники излучения соединены каналами связи с вычислительным устройством и видеомонитором наблюдения, снабженным устройствами акцентирования внимания оператора на нарушение, например, путем визуализации нарушения габарита и подачи тревожного сигнала, а также устройством ответной реакции оператора.
| АВТОМАТИЗИРОВАННАЯ СИСТЕМА КОММЕРЧЕСКОГО ОСМОТРА ПОЕЗДОВ И ВАГОНОВ (АСКО ПВ) | 2004 |
|
RU2252170C1 |
| СПОСОБ ДИСТАНЦИОННОГО КОНТРОЛЯ ГАБАРИТОВ ГРУЗОВ, ПОГРУЖЕННЫХ НА ПОДВИЖНОЙ СОСТАВ, В ПРОЦЕССЕ ИХ ДВИЖЕНИЯ И СИСТЕМА ЭЛЕКТРОННЫХ ГАБАРИТНЫХ ВОРОТ ДЛЯ ДИСТАНЦИОННОГО КОНТРОЛЯ ГАБАРИТОВ ГРУЗОВ, ПОГРУЖЕННЫХ НА ПОДВИЖНОЙ СОСТАВ, В ПРОЦЕССЕ ИХ ДВИЖЕНИЯ | 2004 |
|
RU2249523C1 |
| СПОСОБ ДИСТАНЦИОННОГО КОНТРОЛЯ СОХРАННОСТИ ГРУЗОВ В ЖЕЛЕЗНОДОРОЖНОМ СОСТАВЕ И СИСТЕМА ДИСТАНЦИОННОГО КОНТРОЛЯ СОХРАННОСТИ ГРУЗОВ В ДВИЖУЩЕМСЯ ЖЕЛЕЗНОДОРОЖНОМ СОСТАВЕ | 1997 |
|
RU2138077C1 |
| RU 2066282 C1, 10.09.1996. | |||

