Изобретение относится к железнодорожному транспорту, в частности к устройствам автоматики и телемеханики, осуществляющим контроль технического и коммерческого состояния движущегося железнодорожного состава и видеоконтроль сохранности, правильности размещения и крепления груза на открытом подвижном составе, исправности бортов, крыш вагонов и цистерн, наличия остатков груза и реквизитов крепления.
Известно устройство для контроля негабаритности груза подвижного состава, содержащее две опоры, расположенные по обе стороны рельсового полотна, датчик наличия состава, счетчик вагонов, фотоэлектрические датчики контроля габарита подвижного состава, каждый из которых состоит из излучателя, оптической системы, отражателя и фотоприемника; блок сопряжения, входы которого связаны с выходами фотоэлектрических каналов, блок памяти и регистратор (Авторское свидетельство СССР, №1799773, кл. В 61 К 9/02, 1993).
Недостаток устройства заключается в использовании локационных датчиков, работающих на отражение, снабженных дополнительными конструктивными узлами, такими как отражатель и автономная оптическая система, что снижает надежность устройства и является дополнительным источником помех в условиях атмосферных явлений (туман, световая засветка солнцем, прожектором и др.). Кроме того, устройство не позволяет производить визуальный контроль технического и коммерческого состояния поездов и вагонов.
Известен способ и система дистанционного контроля сохранности грузов в движущемся железнодорожном составе, предназначенный для обеспечения возможности оперативного обнаружения факта несанкционированного доступа в движущемся железнодорожном составе. В парке прибытия производится внешний осмотр подвижного состава посредством неподвижных телекамер общего и детального осмотра (RU 2138077 C1, 6 G 08 В 13/196).
Недостаток изобретения заключается в том, что при визуальном наблюдении подвижного состава в реальном масштабе времени оператор может наблюдать только перспективное изображение поезда (в частности, крыши движущегося вагона), формируемое камерой общего обзора. Изображения бортов вагона формируются телекамерой детального обзора, имеющей узкое поле зрения и предназначенной для визуализации малоразмерных объектов (пломб и т.д.). С телекамеры детального обзора производят непрерывную запись изображения быстро перемещающихся в ее поле зрения объектов поиска, которые не могут быть непосредственно обнаружены оператором визуально. Распознают отклонения образа наблюдаемого объекта от исходного состояния путем его сравнения с эталонным образом, а по результатам сравнения судят о сохранности груза, эталонный образ наблюдаемого объекта предварительно создают в парке отправления, произведя видеозапись подвижного состава в идентичных условиях движения, который затем передают в парк прибытия до прихода наблюдаемого объекта. Кроме того, изобретение не позволяет производить контроль негабаритности погрузки вагонов на подвижном составе для безопасного передвижения железнодорожного транспорта.
Известно устройство для автоматизированного выявления и регистрации нарушения габаритов погрузки подвижного состава при одновременном наблюдении состава сверху, содержащее датчик начала состава и П-образные ворота, установленные над рельсовым путем, со смонтированными на них пятью датчиками контроля габарита подвижного состава в виде оптоэлектронных каналов, проложенных по контуру очертания максимально допустимого габарита состава, датчиком счета вагонов, телекамерой, шарнирно закрепленной на перекладине ворот и связанной по радиоканалу посредством блока сопряжения с местом оператора, содержащим видеомагнитофон, персональную электронную вычислительную машину (ПЭВМ), блок индикации (RU 2066282 С1, 6 В 61 К 9/02).
Недостаток устройства заключается в необходимости установки дополнительных опор для размещения оптоэлектронного датчика начала состава, в неточности счета вагонов из-за наличия в составе вагонов различного типа и назначения (например, возможен двойной счет одного вагона, когда вагон без бортов и несколько грузов на нем сконцентрированы на ограниченных участках пола вагона, что приводит к замыканию светового потока датчика счета вагонов), в отсутствии автономного режима работы блока сопряжения при выходе из строя персональной электронной вычислительной машины оператора, кроме того, установленная на перекладине П-образных ворот одна телекамера не обеспечивает возможность осмотра бортов вагонов, запись видеоизображения камеры ведется на аналоговый видеомагнитофон, что снижает надежность устройства. Однако по своей технической сущности и достигаемому результату данное решение наиболее близко предлагаемому.
Задачей предлагаемой автоматизированной системы коммерческого осмотра поездов и вагонов (АСКО ПВ) является обеспечение возможности оперативного обнаружения коммерческих неисправностей, угрожающих безопасности движения поездов и сохранности перевозимого груза, проверки правильности размещения и крепления груза на открытом подвижном составе, исправности бортов, крыш вагонов и цистерн, наличия остатков груза и реквизитов крепления.
Сущность предлагаемого изобретения заключается в том, что в автоматизированную систему коммерческого осмотра поездов и вагонов, содержащую оптоэлектронный датчик начала состава и установленную над рельсовым путем П-образную несущую конструкцию, на которой размещены телевизионная камера, предназначенная для получения изображения крыши вагонов, пять оптоэлектронных датчиков контроля габаритности погрузки вагонов, оптоэлектронный датчик счета вагонов, выходы датчиков связаны с входами блока индикации и согласования, выход блока индикации и согласования связан с входом персональной электронной вычислительной машины (ПЭВМ) автоматизированного рабочего места оператора, к выходу которой подключен монитор, дополнительно введены четыре оптоэлектронных датчика контроля габаритности погрузки вагонов, оптоэлектронный датчик счета колесных пар, три телевизионные камеры, предназначенные для получения изображений левого и правого бортов вагонов, а также контроля пломб люков цистерн, и прожекторы, при этом дополнительные датчики контроля габаритности погрузки вагонов установлены на несущей конструкции с возможностью контроля совместно с остальными аналогичными датчиками границ совмещенного зонального габарита погрузки и габарита подвижного состава, оптоэлектронный датчик начала состава, оптоэлектронный датчик счета колесных пар, телевизионные камеры левого и правого бортов вагонов закреплены на опорах, телевизионная камера контроля пломб люков цистерн - на ригеле, а прожекторы - на опорах и ригеле несущей конструкции, выходы всех телевизионных камер связаны с видеовходами ПЭВМ, выходы дополнительных датчиков контроля габаритности погрузки вагонов и датчика счета колесных пар связаны с соответствующими входами блока индикации и согласования, подключенного управляющим входом к выходу ПЭВМ, при этом блок индикации и согласования выполнен с возможностью работы в автономном режиме. Введение дополнительных четырех датчиков контроля габаритности погрузки дает возможность контроля границ совмещенного зонального габарита погрузки и габарита подвижного состава; введение датчика для счета колесных пар обеспечивает точность счета вагонов при наличии в составе вагонов различного типа и назначения, расположение датчика начала состава не требует установки дополнительных опор, введение трех дополнительных телекамер дает возможность осмотра подвижного состава с левого борта вагона, правого борта вагона и контроля пломб люков цистерн, введение пяти прожекторов обеспечивает работу в условиях недостаточной освещенности. Выполнение блока индикации и согласования как для работы в автономном режиме, так и под управлением ПЭВМ оператора повышает надежность системы.
Программное обеспечение автоматизированного рабочего места оператора пункта коммерческого осмотра обеспечивает выполнение следующих функций: прием ПЭВМ оператора информации о количестве локомотивов в составе по локальной сети от автоматизированной системы управления сортировочной станции; управление блоком индикации и согласования; прием информации о негабаритностях погрузки вагонов проходящего состава от блока индикации и согласования; протоколирование данных о проходящих составах; отображение на экране ПЭВМ оператора негабаритностей проходящего подвижного состава; звуковая индикация начала состава и негабаритных вагонов; вывод на экран видеоизображения проходящего состава с трех телевизионных камер (в зависимости от выбора оператора); запись на жесткий диск сжатого видеоизображения от четырех телевизионных камер; выбор любой телекамеры для полноэкранного просмотра; хранение архива видеоизображений, ограниченное только размером жесткого диска; просмотр видеоархива на экране ПЭВМ оператора в оконном или полноэкранном режимах; воспроизведение изображения с произвольной скоростью в прямом и обратном направлении; покадровый просмотр и режим стоп-кадра; масштабирование произвольных областей изображения в режиме стоп-кадра; корректировка геометрических искажений изображения, вызванных применением телекамер с широкоугольными объективами для осмотра состояния бортов вагонов; поиск видеоинформации и данных о негабарите по времени прохождения состава, номеру состава, порядковому и инвентарному номеру вагона; печать видеоизображения; вывод на печать справки о коммерческих неисправностях вагонов; запись, хранение в архиве и редактирование информации о принятых составах, вагонах и обнаруженных негабаритностях; редактирование данных о составах и вагонах; тестирование блока индикации и согласования; идентификацию операторов по индивидуальным электронным ключам регистрации; передачу по локальной сети сообщений с информацией о составе. При выходе ПЭВМ оператора из строя или наладке системы оборудование контроля негабаритности погрузки вагонов работает в автономном режиме, В этом режиме блок индикации и согласования обеспечивает выполнение следующих функций: ручной ввод количества локомотивов; прием сигналов от датчиков; индикацию порядкового номера вагона, индикацию зон негабаритности погрузки с помощью индикатора “НЕГАБАРИТ” на передней панели блока. Программа обеспечивает выполнение следующих режимов функционирования: режим наблюдения, режим ожидания состава, режим прохождения состава, режим просмотра архива, режим масштабирования изображения, режим теста блока индикации и согласования.
Техническим результатом предлагаемой системы является обеспечение визуального и звукового контроля совмещенного зонального габарита погрузки и габарита подвижного состава, визуального контроля коммерческого состояния подвижного состава при прохождении его в зоне контроля посредством датчика начала состава, датчика счета вагонов, датчика счета колесных пар, девяти датчиков контроля габаритности погрузки вагонов и телекамер левого борта вагона, крыши вагона, правого борта вагона и контроля пломб люков цистерн (в зависимости от выбора оператора) в реальном масштабе времени по экрану ПЭВМ оператора в режиме “ПОЛИЭКРАН” (одновременное отображение трех окон изображений от телевизионных камер и окна вывода негабарита с отображением текущего номера вагона, зоны негабаритности - красного отрезка линии, формированием звукового сигнала обнаружения негабаритности) или полноэкранном режиме; формирование отчета (справки) о выявленных негабаритах; создание видеоархива.
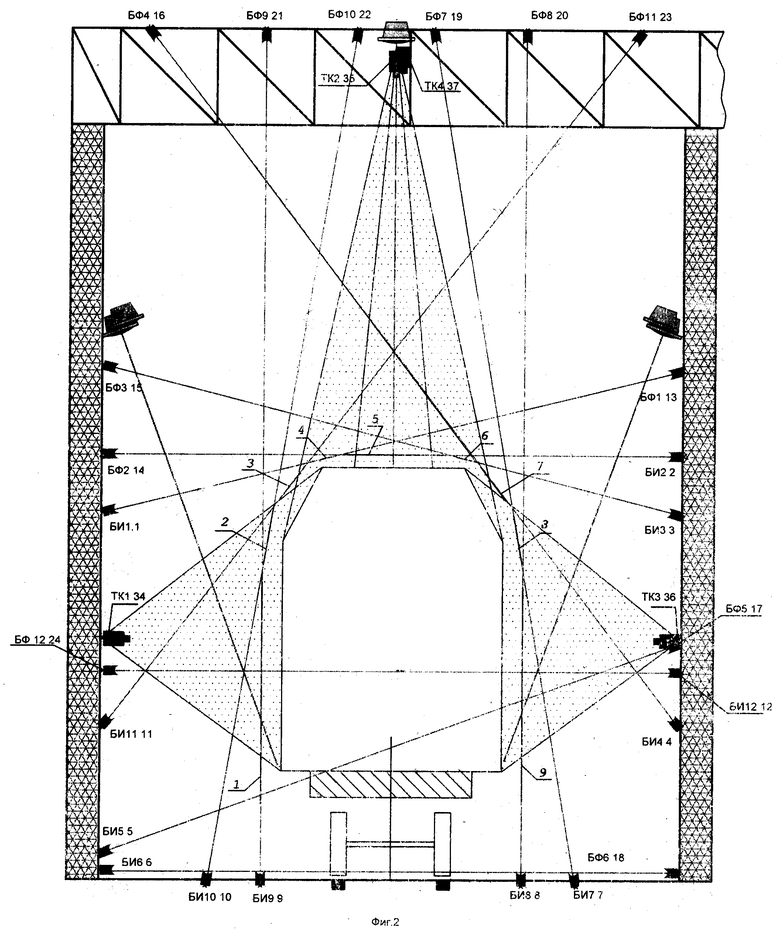
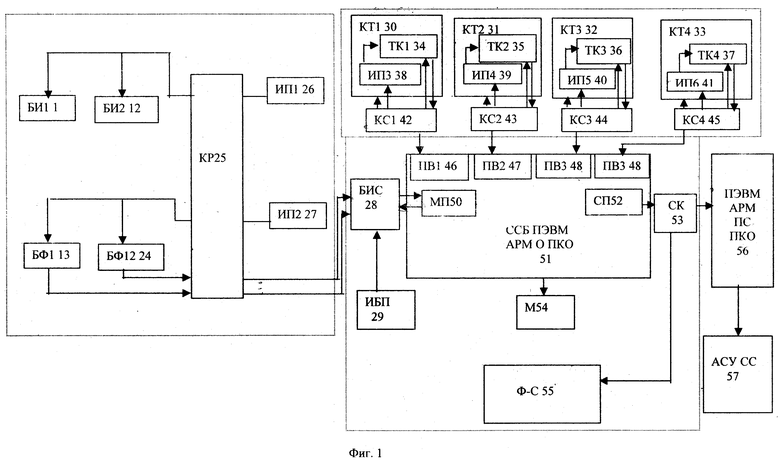
На фиг.1 представлена структурная схема системы (расположение системы освещения не показано). На фиг.2 представлена схема расположения системы на несущей конструкции.
Каждый оптоэлектронный датчик представляет собой двухпозиционное устройство, состоящее из блока излучателя (БИ1 1...БИ12 12) и блока фотоприемника (БФ1 13...БФ12 24). Излучатель формирует инфракрасный луч, который направляется на фотоприемник. Для обеспечения осуществления контроля датчики закрепляют на П-образные ворота, установленные над рельсовым путем, и размещают таким образом, что инфракрасные лучи формируют границу зоны габаритности, обеспечивая оперативный контроль негабаритности груза при пересечении лучей любого из девяти датчиков контроля габаритности. Выходные сигналы фотоприемников через коробку распределительную (КР25) поступают на блок индикации и согласования (БИС28), выход которого связан с входом мультипортовой платы (МП 50). Питание излучателей и фотоприемников осуществляется через коробку распределительную от источников питания (ИП1 26 и ИП2 27).
Телевизионные камеры (ТК1 34, ТК2 35, ТКЗ 36, ТК4 37), установленные в термостатированные контейнеры (КТ1 30, КТ2 31, КТЗ 32, КТ4 33 соответственно) и закрепленные на П-образной несущей конструкции, передают видеосигналы через коробки соединительные (КС1 42, КС2 43, КСЗ 44, КС4 45 соответственно) на входы плат видеоввода (ПВ1 46, ПВ2 47, ПВЗ 48, ПВ4 49 соответственно) специализированного системного блока автоматизированного рабочего места оператора пункта коммерческого осмотра (ССБ АРМ О ПКО 51), выход которого связан с входом монитора компьютерного (М 54). Выход сетевой платы (СП 52) соединен с входом сетевого концентратора (СК 53), выход которого посредством локальной сети соединен с входом “файл-сервера” (Ф-С 55) - видеоархивом, с ПЭВМ автоматизированного рабочего места приемосдатчика пункта коммерческого осмотра (ПЭВМ АРМ ПС ПКО 56) и автоматизированной системой управления сортировочной станции (АСУ СС 57). Питание телекамер осуществляется от источников питания (ИПЗ 38, ИП4 39, ИП5 40, ИП6 41); питание устройств, входящих в состав автоматизированного рабочего места оператора пункта коммерческого осмотра (51) осуществляется от источника бесперебойного питания (ИБП 29).
На П-образной несущей конструкции датчики контроля габаритности погрузки устанавливаются попарно, формируя зоны габаритности: 1-ая зона-БИ9 9 и БФ9 21; 2-ая зона-БИ10 10 и БФ10 22; 3-я зона-БИП 11 и БФ11 23; 4-ая зона-БИ1 1 и БФ1 13; 5-ая зона-БИ2 2 и БФ2 14; 6-ая зона-БИЗ 3 и БФЗ 15; 7-ая зона-БИ4 4 и БФ 4 16; 8-ая зона-БИ7 7 и БФ7 19; 9-ая зона-БИ8 8 и БФ8 20. Кроме датчиков контроля погрузки вагонов на несущей конструкции устанавливаются попарно датчик счета вагонов (БИ5 5 и БФ5 17), датчик счета колесных пар (БИ 6 6 и БФ 6 18), датчик начала состава (БИ12 12 и БФ12 24). Датчики устанавливаются в защитные обогреваемые корпуса. Телекамеру левого борта вагона (ТК1 34),телекамеру крыши вагона (ТК2 35), телекамеру правого борта вагона (ТКЗ 36), телекамеру контроля пломб люков цистерн (ТК4 37) устанавливают в защитные термостатированные контейнеры (КТ1 30, КТ2 31, КТЗ 32, КТ4 33) и закрепляют на опорах и ригеле П-образной несущей конструкции. Для обеспечения работы в условиях недостаточной освещенности используют пять прожекторов, которые закрепляют на несущей конструкции (на Фиг.2 изображены условно). Установка коробки распределительной (КР25), источников питания (ИП1 26, ИП2 27, ИПЗ 38, ИП4 39, ИП5 40, ИП6 41) на Фиг.2 не показана.
Система работает следующим образом.
Оператор, получив информацию о приближении состава к зоне контроля, вводит в ПЭВМ (51) данные о количестве локомотивов в составе и номер состава или указанные данные передаются на ПЭВМ (51) по локальной сети от автоматизированной системы управления станции (АСУ СС57) автоматически. ПЭВМ (51) передает эти данные в блок индикации и согласования (БИС28) по каналу связи в соответствии со стандартом RS-232, в котором осуществляется загрузка внутреннего счетчика вагонов. При входе состава в зону контроля локомотив пересекает луч от блока излучателя (БИ12 12) датчика начала состава. Информация о пересечении луча формируется блоком фотоприемника (БФ12 24) датчика, выходной сигнал поступает на блок индикации и согласования (БИС28), который формирует электрический импульс и передает на мультипортовую плату (МП 50) сигнал о начале записи видеоинформации. Видеосигналы от телекамер (ТК1 34, ТК2 35, ТКЗ 36, ТК4 37) поступают на видеовходы (ПВ1 46, ПВ2 47, ПВ3 48, ПВ4 49), а на мониторе (М54) отображается информация от выбранных оператором для просмотра трех телевизионных камер. Блок индикации и согласования (БИС28) осуществляет счет вагонов в зоне контроля по перекрытию луча датчика счета колесных пар (БИ6 6 и БФ6 18) и датчика счета вагонов (БИ5 5 и БФ5 17). При этом увеличиваются показания счетчика порядкового номера вагона на передней панели блока индикации и согласования (БИС 28), а также БИС (28) передает на мультипортовую плату (МП50) специализированного системного блока (ССБ51) данные о начале и конце состава, текущий номер вагона. При пересечении лучей датчиков, формирующих границу зоны габаритности, датчики формируют тревожное извещение. Через распределительную коробку (КР25) тревожное извещение с помощью оборудования передачи сигналов поступает на блок индикации и согласования (БИС28), который формирует световой (с индикацией участка негабаритности) и звуковой сигнал перекрытия луча любого из девяти датчиков контроля габаритности погрузки, передает данные о состоянии датчиков контроля и значение номера вагона в ПЭВМ(51) для обработки, на мониторе (М54) зона негабаритности отображается в виде красного отрезка линии. На передней панели блока индикации и согласования (БИС28) зажигается соответствующий индикатор “НЕГАБАРИТ”. Факт негабаритности регистрируется в журнале событий с фиксацией порядкового номера вагона с негабаритной погрузкой. В процессе прохождения состава оператор может маркировать просматриваемый вагон в момент визуального обнаружения коммерческой неисправности. Включение осветительной системы в темное время суток осуществляется автоматически с помощью фотореле.
Результаты осмотра состояния вагонов и грузов с помощью средств автоматизированной системы коммерческого осмотра поездов и вагонов (АСКО ПВ) обрабатываются оператором АРМ О ПКО (маркировка вагонов, установка или снятие запрета ставить вагон в состав, ввод примечаний о коммерческих неисправностях в таблицу “Вагоны”). После обработки результатов осмотра состояния вагонов и грузов автоматически формируется справка об обнаруженных коммерческих неисправностях контролируемого состава, которая передается в автоматизированное рабочее место приемосдатчика пункта коммерческого осмотра (АРМ ПС ПКО 56). На основе этих данных оператор АРМ ПС ПКО (56) формирует учетно-отчетную документацию по контролируемому составу и передает ее по локальной сети в автоматизированную систему управления сортировочной станции (АСУ СС 57).
Геометрия установки телекамер и датчиков относительно несущей конструкции должна обеспечивать выполнение ряда специальных требований:
- для крепления телекамер к вертикальным опорам и ферме используются специальные хомуты, охватывающие вертикальные опоры и место их установки на ферме;
- в целях получения полного и высококачественного изображения стенок и крыши вагонов камера левого борта вагона (ТК1 34) и камера правого борта вагона (ТКЗ 36) устанавливаются на высоте З м от головки рельса, а камера крыши вагона (ТК2 35) и камера контроля пломб люков цистерн (ТК4 37) - на высоте 9,4 м на ферме (по продольной оси пути);
- излучатели и приемники датчиков монтируются на опорах с помощью стяжных хомутов, а на ферме - специальных кронштейнов, излучатели наземных датчиков (БИ7 7, БИ8 8, БИ10 10) устанавливаются на кронштейнах, прикрепляемых к заглубленному в землю бетонному основанию;
- координатные точки размещения датчиков на опорах и ферме рассчитываются так, чтобы точки пересечения смежных лучей датчиков имели координаты, установленные для совмещенного зонального габарита действующими техническими условиями погрузки и крепления грузов (для каждого проекта проводится индивидуальный расчет координат);
- блок излучателя (БИ 6 6) и блок фотоприемника (БФ 6 18) датчика счета колес устанавливается на высоте 80 мм от головки рельса;
- блок излучателя (БИ5 5) датчика счета вагонов устанавливается на высоте H=0,213(5868+L2) мм, где L2- измеренное расстояние от центра колеи железнодорожного пути до центра правой опоры (по уровню головок рельс); блок приемника (БФ5 17) датчика счета вагонов устанавливается на высоте Н=0,213(5868-1) мм, где L1- измеренное расстояние от центра колеи железнодорожного пути до центра левой опоры (по уровню головок рельс);
- блок излучателя (БИ12 12) и блок фотоприемника (БФ12 24) датчика начала состава устанавливаются на высоте 2,6 м от головки рельса;
- электропитание телевизионных камер, осветительной системы и датчиков, а также передача видеосигналов осуществляется по соответствующим кабелям.
Геометрия установки несущей конструкции должна обеспечивать выполнение ряда специальных требований:
- расстояние от несущей конструкции до ближайшего стрелочного перевода должно быть не менее 30 м (с обеих сторон);
- ось каждой из вертикальных опор должна находиться на расстоянии не менее, чем 3800 мм от продольной оси пути;
- высота от уровня головки рельса до нижнего пояса перекладины - не менее 9400 мм;
- должно быть обеспечено симметричное расположение вертикальных опор несущей конструкции относительно продольной оси пути;
- опоры должны быть установлены строго вертикально и стабилизированы в этом положении;
- расстояние между осями смежных путей (ширина междупутья) в месте установки опор несущей конструкции системы не должно быть менее 5300 мм;
- не допускается размещение несущей конструкции системы в кривых участках пути;
- несущая конструкция системы в месте ее размещения на станции и напольное оборудование системы не должны ограничивать установленные правилами технической эксплуатации железных дорог (ПТЭ) скорости движения поездов и не вызывать осложнений в поездной и маневровой работе станции;
- при выборе места размещения несущей конструкции системы следует исходить из необходимости обеспечения минимальной длины линий электропитания и связи (управления) для системы АСКО ПВ;
- по обе стороны от несущей конструкции системы отрезки пути длиной по 50 мм должны быть прямыми и горизонтальными, с допускаемым превышением уровней верха головок рельсов контролируемого пути друг над другом в пределах не более 15 мм.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ И СИСТЕМА КОМПЛЕКСНОГО ДИСТАНЦИОННОГО КОНТРОЛЯ СОСТОЯНИЯ, СОХРАННОСТИ И ГАБАРИТНОСТИ ГРУЗОВ, ПЕРЕВОЗИМЫХ ЖЕЛЕЗНОДОРОЖНЫМ ТРАНСПОРТОМ | 2006 |
|
RU2317907C2 |
| Автоматизированная система коммерческого осмотра поездов и вагонов | 2018 |
|
RU2682148C1 |
| СПОСОБ И СИСТЕМА ДИСТАНЦИОННОГО КОНТРОЛЯ НЕГАБАРИТНОСТИ ГРУЗОВ НА ПОДВИЖНОМ СОСТАВЕ ЖЕЛЕЗНОДОРОЖНОГО ТРАНСПОРТА | 2006 |
|
RU2311311C2 |
| Автоматизированная система коммерческого осмотра поездов и вагонов с модульной архитектурой (АСКО ПВ 3.0) | 2018 |
|
RU2713132C1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ВАГОНОВ | 2009 |
|
RU2410263C1 |
| СПОСОБ ДИСТАНЦИОННОГО КОНТРОЛЯ ЗА КОММЕРЧЕСКИМИ НЕИСПРАВНОСТЯМИ НА ПОДВИЖНОМ СОСТАВЕ | 2003 |
|
RU2252886C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ЗОН И СТЕПЕНЕЙ НЕГАБАРИТНОСТИ ГРУЗОВ НА ОТКРЫТОМ ПОДВИЖНОМ СОСТАВЕ С ПОМОЩЬЮ ТЕЛЕВИЗИОННЫХ ИЗОБРАЖЕНИЙ | 2008 |
|
RU2355595C1 |
| СПОСОБ ДИСТАНЦИОННОГО КОНТРОЛЯ ГАБАРИТОВ ГРУЗОВ, ПОГРУЖЕННЫХ НА ПОДВИЖНОЙ СОСТАВ, В ПРОЦЕССЕ ИХ ДВИЖЕНИЯ И СИСТЕМА ЭЛЕКТРОННЫХ ГАБАРИТНЫХ ВОРОТ ДЛЯ ДИСТАНЦИОННОГО КОНТРОЛЯ ГАБАРИТОВ ГРУЗОВ, ПОГРУЖЕННЫХ НА ПОДВИЖНОЙ СОСТАВ, В ПРОЦЕССЕ ИХ ДВИЖЕНИЯ | 2004 |
|
RU2249523C1 |
| Система технического и коммерческого контроля состояния поездов | 2019 |
|
RU2728202C1 |
| АВТОМАТИЗИРОВАННАЯ СИСТЕМА КОММЕРЧЕСКОГО ОСМОТРА 3D КОНТРОЛЬ | 2019 |
|
RU2718769C1 |
Изобретение относится к железнодорожной автоматике и телемеханике. Над рельсовым путем установлена П-образная несущая конструкция, на которой размещены четыре телевизионных камеры, предназначенные для получения изображений крыши вагонов, левого и правого бортов вагонов, а также контроля пломб люков цистерн, девять оптоэлектронных датчиков контроля габаритности погрузки вагонов, оптоэлектронный датчик счета вагонов, оптоэлектронный датчик счета колесных пар, оптоэлектронный датчик начала состава и прожекторы. Выходы датчиков связаны с входами блока индикации и согласования, подключенного управляющим входом к выходу ПЭВМ автоматизированного рабочего места оператора. Выход блока индикации и согласования связан с входом ПЭВМ. К выходу последней подключен монитор. Датчики контроля габаритности погрузки вагонов установлены на несущей конструкции с возможностью контроля границ совмещенного зонального габарита погрузки и габарита подвижного состава. Выходы всех телевизионных камер связаны с видеовходами ПЭВМ. Блок индикации и согласования выполнен с возможностью работы в автономном режиме. Изобретение обеспечивает оперативный контроль коммерческих неисправностей, угрожающих безопасности движения поездов и сохранности перевозимого груза. 2 ил.
Автоматизированная система коммерческого осмотра поездов и вагонов, содержащая оптоэлектронный датчик начала состава и установленную над рельсовым путем П-образную несущую конструкцию, на которой размещены телевизионная камера, предназначенная для получения изображения крыши вагонов, пять оптоэлектронных датчиков контроля габаритности погрузки вагонов, оптоэлектронный датчик счета вагонов, при этом выходы датчиков связаны с входами блока индикации и согласования, выход блока индикации и согласования связан с входом персональной электронной вычислительной машины (ПЭВМ) автоматизированного рабочего места оператора, к выходу которой подключен монитор, отличающаяся тем, что в нее введены четыре дополнительных оптоэлектронных датчика контроля габаритности погрузки вагонов, оптоэлектронный датчик счета колесных пар, три дополнительных телевизионных камеры, предназначенные для получения изображений левого и правого бортов вагонов, а также контроля пломб люков цистерн, и прожекторы, при этом дополнительные датчики контроля габаритности погрузки вагонов установлены на несущей конструкции с возможностью контроля совместно с остальными аналогичными датчиками границ совмещенного зонального габарита погрузки и габарита подвижного состава, оптоэлектронный датчик начала состава, оптоэлектронный датчик счета колесных пар, телевизионные камеры левого и правого бортов вагонов закреплены на опорах, телевизионная камера контроля пломб люков цистерн - на ригеле, а прожекторы - на опорах и ригеле несущей конструкции, выходы всех телевизионных камер связаны с видеовходами ПЭВМ, выходы дополнительных датчиков контроля габаритности погрузки вагонов и датчика счета колесных пар связаны с соответствующими входами блока индикации и согласования, подключенного управляющим входом к выходу ПЭВМ, блок индикации и согласования выполнен с возможностью работы в автономном режиме.
| RU 2066282 C1, 10.09.1996 | |||
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ НЕГАБАРИТНОСТИ ТРАНСПОРТНЫХ СРЕДСТВ | 1991 |
|
RU2040421C1 |
| DE 4015086 A1, 17.01.1991 | |||
| DE 10010019 C1, 16.08.2001. | |||

