Изобретение относится к машиностроению, в частности к сообщению вращательного движения, и может быть использовано в вариаторах для бесступенчатого регулирования чисел оборотов выходного вала.
Известен способ сообщения вращательного движения в вариаторе, заключающийся в передаче вращения от ведущего звена к ведомому с возможностью изменения передаточного отношения путем параллельного смещения указанных звеньев и сообщения равномерного вращения ведомому звену за счет криволинейных направляющих, выполненных на промежуточном звене. В указанном способе криволинейные направляющие обеспечивают равномерное вращение ведомого звена, но не определяют параметров передаточного отношения и не служат для равномерного изменения скорости вращения ведомого звена в процессе сообщения вращательного движения от ведущего звена к ведомому (1).
Известен способ сообщения вращательного движения в вариаторе, заключающийся в передаче вращения от ведущего звена к ведомому с возможностью изменения передаточного отношения путем поворота оси вращения средства изменения передаточного отношения, сообщения ведомому звену вращательного движения по заданному закону за счет направляющих, воздействия на упорные элементы в зоне взаимодействия ведущего и ведомого звеньев при помощи двуплечих рычагов для передачи движения на выходной орган. В указанном способе упорный элемент удерживается в прижатом состоянии за счет направляющих, выполненных на двуплечих рычагах, что снижает КПД вариатора (2).
Сущность изобретения состоит в том, что направляющие выполнены на ведущих и ведомых звеньях, а передачу крутящего момента между ними осуществляют воздействием на упорные элементы путем их принудительного соприкосновения с выходным органом в зоне взаимодействия ведущего и ведомого звеньев при помощи эксцентриков или кулачков, установленных на связующих деталях средства изменения передаточного отношения, при этом направляющие выполняют по заданным параметрам передаточного отношения.
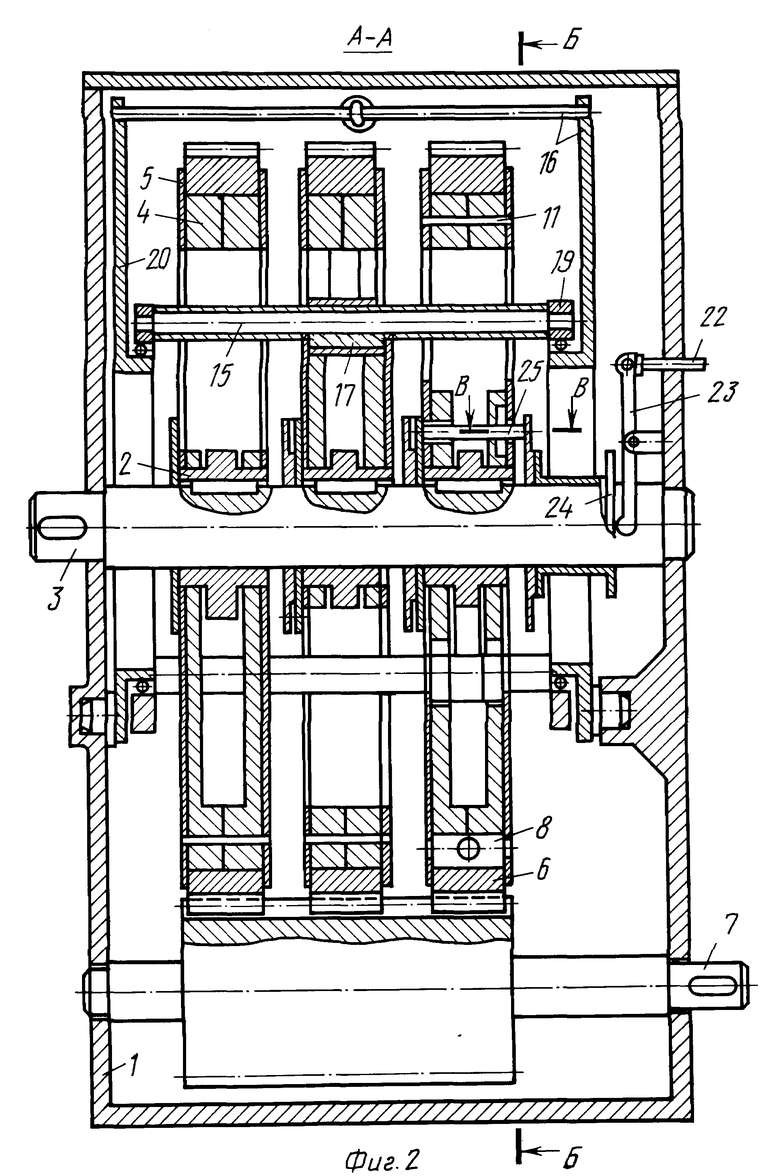
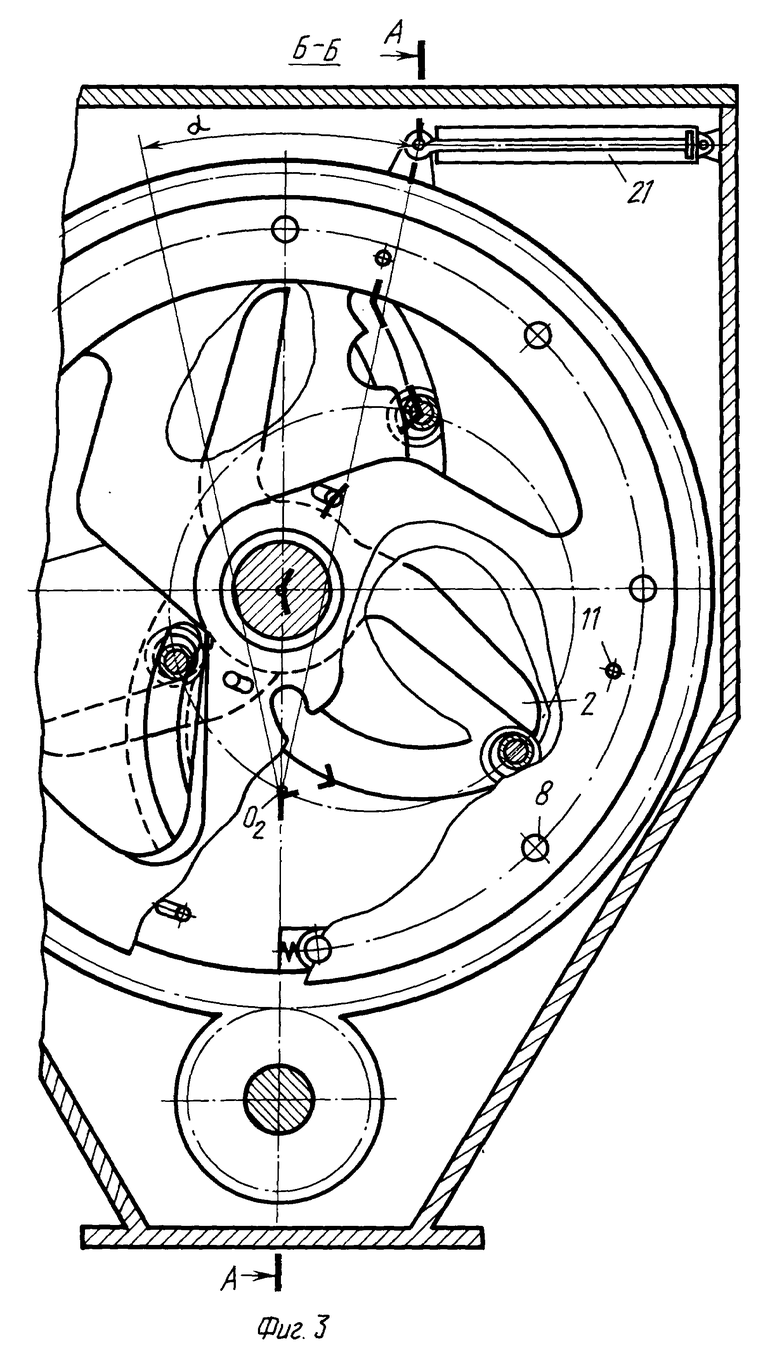
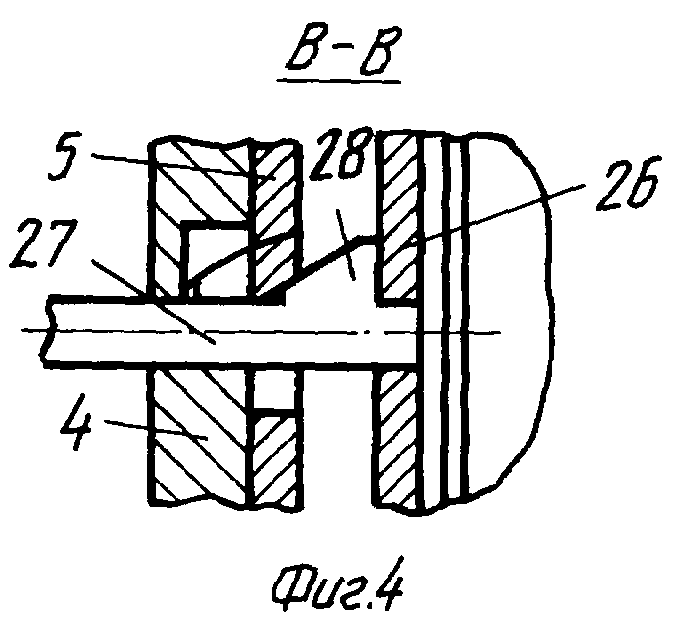
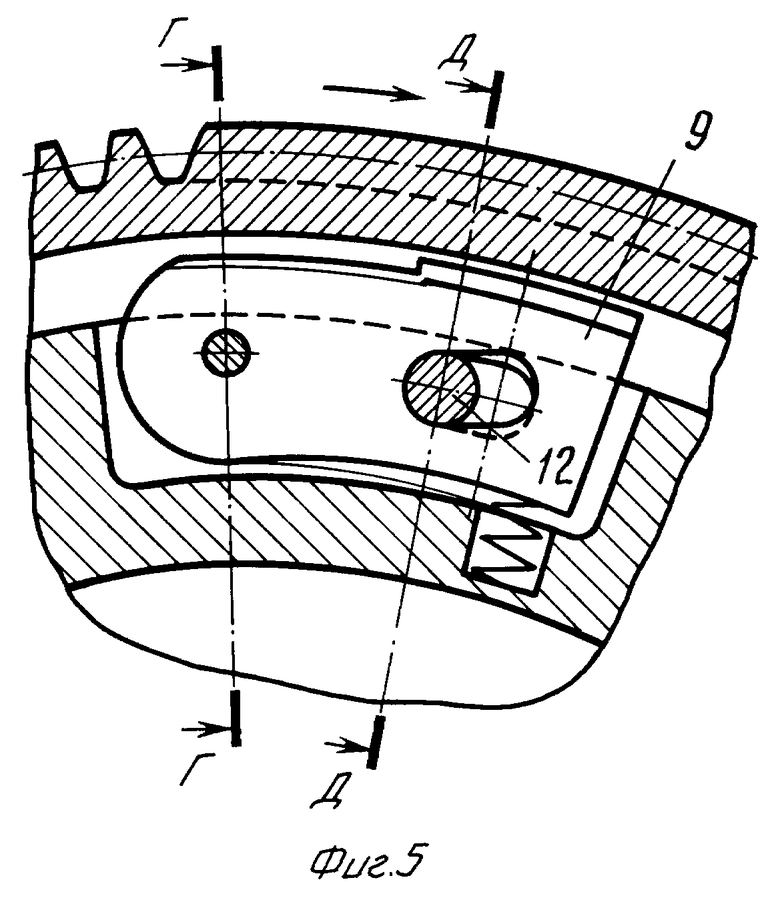
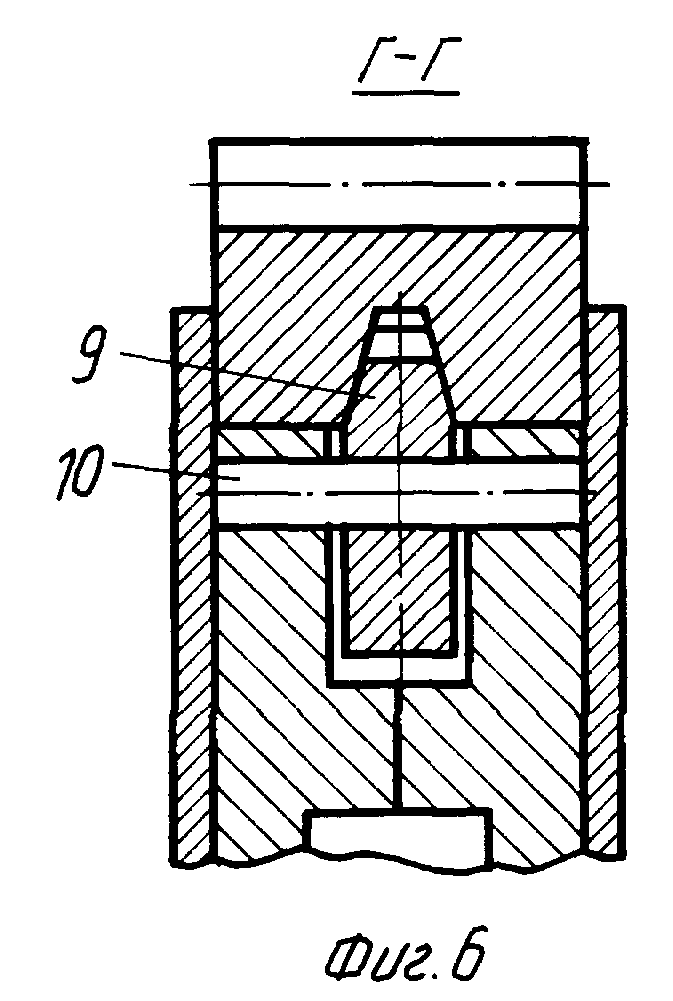
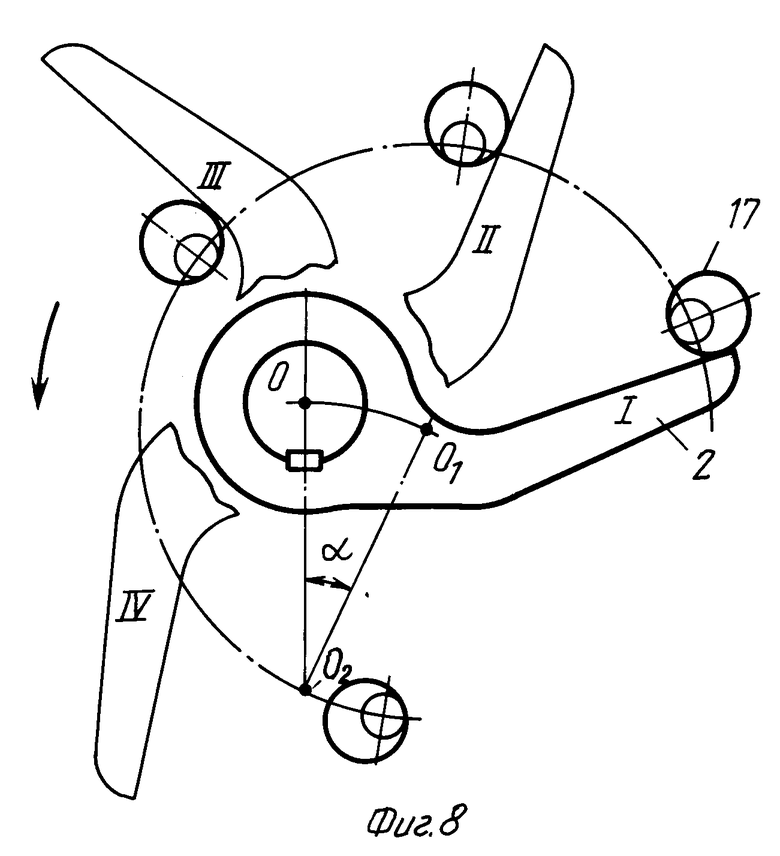
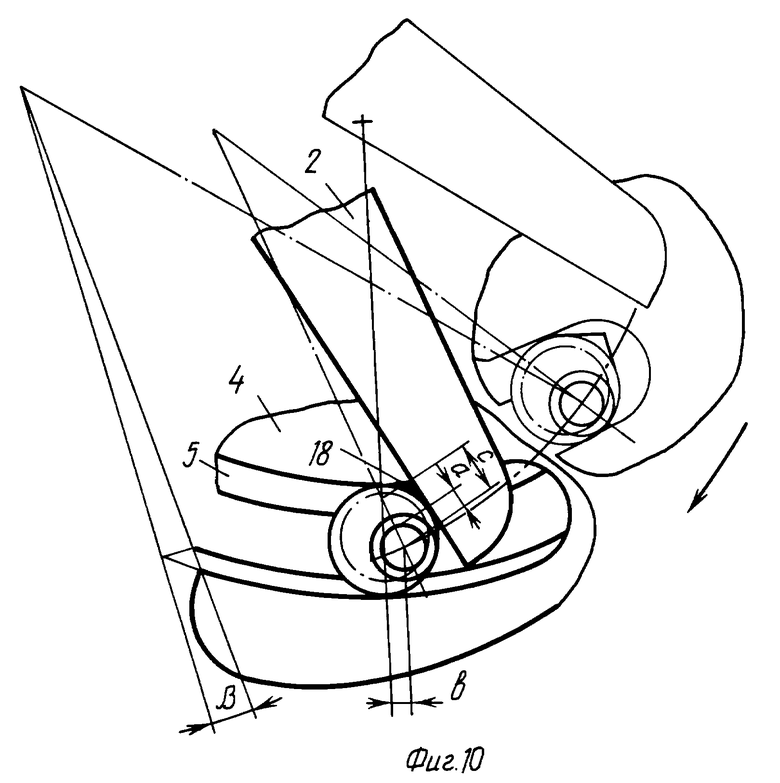
На фиг.1 представлен графический метод нахождения траекторий направляющих на взаимодействующих, ведущего и ведомого, звеньях при заданном (i=2) параметре передаточного отношения; на фиг.2 изображен вариатор для осуществления способа - разрез А-А на фиг.3; на фиг.3 - разрез Б-Б на фиг.2; на фиг.4 - разрез В-В на фиг.2; на фиг.5 - вариант выполнения упорного элемента в виде клина; на фиг.6 - разрез Г-Г на фиг.5; на фиг.7 - разрез Д-Д на фиг. 5; на фиг. 8 - вариант, когда точка O2, вокруг которой производят поворот средства изменения передаточного отношения, находится вне зоны угла взаимодействия ведущего и ведомого звеньев; на фиг.9 - вариант выполнения щек, охватывающих ведомые звенья и выходные органы, с зубчатыми венцами; на фиг. 10 изображено положение ведущего звена во взаимодействии через эксцентрик с ведомым звеном и через связующую деталь средства изменения передаточного отношения со щекой.
Сущность выполнения направляющих на взаимодействующих звеньях по заданным параметрам передаточного отношения иллюстрируется чертежом на фиг.1, где параметром передаточного отношения, при максимальном угле поворота α вокруг точки O2, средства изменения передаточного отношения, выбираем, например, i = 2. Угол взаимодействия ведущего звена 2 выбираем из условия 360o: 3 = 120o, 3 - число пар ведущего и ведомого звеньев. При i = 2 в этом случае ведомое звено 4 должно повернуться на угол 60o. Направляющую рабочую поверхность ведущего звена 2 строим с учетом поворачивания этого звена вокруг центра 0 на 120o и поворачивания связующей детали 15, средства изменения передаточного отношения вокруг центра O1 также на 120o. Через эксцентрик 17 в данном случае будет происходить взаимодействие ведущего 2 и ведомого 4 звеньев на угле поворота 120o ведущего звена 2. С учетом касания эксцентрика 17 с рабочей поверхностью ведущего звена 2 в крайних точках (точки К и Л) угла поворота 120o вокруг центра O и одновременного поворота связующей детали 15 средства изменения передаточного отношения вокруг центра O1, проводим линию, например прямую, соединяющую указанные точки. Эта линия и будет направляющей рабочей поверхностью ведущего звена 2.
Направляющую рабочую поверхность ведомого звена 4 строим с учетом поворота этого звена на 60o, при повороте ведущего звена 2 на 120o. Для этого, поворачивая ведущее звено 2 из положения E в положение E1 на определенные углы, например на 60o и 120o, ведомое звено 4 поворачиваем из положения И в положение И1 на 30o и 60o соответственно. На ведомом звене 4 при этом отмечаем положения эксцентрика 17, при указанных углах поворота взаимодействующих ведущего и ведомого звеньев. Это положения эксцентрика с центрами: O4 - соответствующее началу взаимодействия ведущего и ведомого звеньев; И1 - соответствующее повороту ведущего и ведомого звеньев на 60o и 30o соответственно; O3 - соответствующее повороту ведущего и ведомого звеньев на 120o и 60o соответственно. Таким же образом можно определить промежуточные положения эксцентрика, например, при повороте ведущего звена 2 на 30o и 90o, при одновременном повороте ведомого звена 4 на 15o и 45o соответственно. Соединяя плавной кривой по касательной к образующей определенных выше положений эксцентрика, получаем направляющую на ведомом звене 4 при i=2.
На фиг.1 видно, что при повороте точки E ведущего эвена 2 на 120o, точка И на ведомом звене 4 повернулась на 60o, т.е. направляющие на взаимодействующих ведущего и ведомого звеньях выполнены по заданному параметру передаточного отношения (i=2).
Направляющие на щеках 5 выполняют по образующей связующей детали 15 средства изменения передаточного отношения и на участке взаимодействия ведущего и ведомого звеньев, линии направляющих на щеках 5, должны быть параллельны линиям направляющих на ведомых звеньях 4.
Вариатор для осуществления способа сообщения вращательного движения состоит из корпуса 1, ведущих звеньев 2, неподвижно установленных на валу 3, ведомых звеньев 4 и щек 5, установленных на ступице ведущего звена 2 с возможностью их относительного поворота. На ведомых звеньях 4 также с возможностью относительного поворота установлены выходные органы 6, которые находятся в зацеплении с выходным валом 7. Между ведомым звеном 4 и выходным органом 6 устанавливают подпружиненные упорные элементы 8. Упорные элементы могут быть выполнены в виде клина 9, установленного на оси 10 на ведомом звене 4 с возможностью соприкосновения с выходным органом 6 клиновидной частью. Щеки 5 охватывают по бокам ведомые звенья 4 и выходные органы 6, соединены между собой стержнями 11, которые располагаются в пазах ведомых звеньев 4. Щеки 5 имеют возможность поворачиваться на некоторый угол β (см. фиг.10) относительно ведомого звена 4, при этом они передвигают упорные элементы 8 или пальцы 12, в случае если устанавливают клиновидные упорные элементы 9. Пальцы 12, передвигаясь в одном направлении в пазах упорных элементов 9 и ведомого звена 4, производят соприкосновения упорных элементов 9 с выходным органом 6 и осуществляют размыкания, передвигаясь в обратном направлении. Щеки могут быть выполнены с зубчатыми венцами 13 и находиться в зацеплении с зубчатыми венцами щек 14. Через направляющие ведомого звена 4 и щек 5 проходят связующие детали 15, средства изменения передаточного отношения 16. На связующих деталях 15, для взаимодействия ведущего 2 и ведомого 4 звеньев и относительного поворота ведомого звена 4 и щек 5, установлены эксцентрики 17. Вместо эксцентриков могут быть установлены кулачки 18 (см. фиг. 10 - эксцентрик вместе с затушеванной частью). Связующие детали 15, средства изменения передаточного отношения 16 закреплены на кольцах 19, которые свободно вращаются на кронштейнах 20, установленных в корпусе 1 с возможностью поворота вокруг точки O2. Поворот средства изменения передаточного отношения осуществляют гидроцилиндром 21. При необходимости через тягу 22, коромысло 23, втулку 24 и нажимные устройства 25 осуществляют разрыв потока мощности. Нажимные устройства 25 состоят из пластин 26 и штанг 27, которые проходят через отверстия ведомого звена 4 и пазы щек 5. Штанги 27 имеют коническую часть 28, посредством которых осуществляют угловое смещение щек 5 относительно ведомого звена 4.
Осуществление способа сообщения вращательного движения поясняется с помощью вариатора, представленного на графических материалах.
При вращении входного вала 3, при повернутом средстве изменения передаточного отношения 16 на угол α ведущее звено 2 (одно из трех) через эксцентрик 17 сообщает вращательное движение ведомому звену 4, в зоне угла взаимодействия ведущего и ведомого звеньев (зона 120o для ведущего и 60o для ведомого звеньев - см. фиг. 1). Через каждые 120o вращения ведущего звена 2 происходит поочередная смена взаимодействий - по одному из трех пар ведущего и ведомого звеньев 2 и 4. Окончание взаимодействия через эксцентрик 17 первой пары звеньев 2 и 4 совпадают с началом взаимодействия второй пары звеньев 2 и 4, а окончание взаимодействия второй пары звеньев с началом взаимодействия третьей пары и т.д. Окончание взаимодействия ведущего и ведомого звеньев 2 и 4 происходит в момент, когда линейная скорость ведомого звена 4, в месте соприкосновения через эксцентрик 17, оказывается больше линейной скорости ведущего звена 2. В этот момент ведущее звено 2 перестает оказывать давление на эксцентрик 17 и происходит относительный поворот щек 5 и ведомого звена 4 на угол β, а ведомое звено 4 ведется деталью 15 средства изменения передаточного отношения. В начале взаимодействия ведущего 2 и ведомого 4 звеньев, через эксцентрик 17, происходит поворот эксцентрика до тех пор, пока плечо давления "а" не уравняется с плечом сопротивления "в". В этом случае щека 5 смещается относительно ведомого звена 4 на угол β (см. фиг. 1). Плечо давления "с" будет больше плеча сопротивления "в" в случае, если вместо эксцентрика на связующих деталях 15 установить кулачки 18. В зависимости от формы кулачка можно варьировать плечами давления и сопротивления. При повороте щек 5, относительно ведомых звеньев 4 назад, происходит заклинивание упорных элементов 8 между ведомым звеном 4 и выходным органом 6. Происходит передача крутящего момента на выходной орган 6. В момент окончания взаимодействия ведущего и ведомого звеньев, когда ведущее звено 2 перестает оказывать давление на эксцентрик 17, щеки 5 поворачиваются относительно ведомого звена 4 вперед по ходу вращения и продвигают упорные элементы 8 в широкую часть выточки ведомого звена 4. Происходит расклинивание упорных элементов 8 между ведомым звеном 4 и выходным органом 6. Передача крутящего момента прекращается и связующая деталь 15 средства изменения передаточного отношения 16 вращает щеки 5, а вместе с ними через стержни 11 и ведомое звено 4 в расклиненном состоянии с выходным органом 6. Такая же динамика расклиниваний и заклиниваний будет происходить и в случае, когда упорные элементы будут выполнены в виде клина 9 и установлены на ведомом звене 4 с возможностью поворота на оси 10. После размыкания контакта между ведомым звеном 4 и выходным органом 6 ведомое звено 4 вращается с большей угловой скоростью, чем при взаимодействии с ведущим звеном, т. е. догоняет отставание, которое произошло при взаимодействии ведущего и ведомого звеньев. Ведомое звено 4 может быть выполнено в виде зубчатого колеса (см. фиг.9). В этом случае выходной орган 6, выполненный также в виде зубчатого колеса и кинематически связанный с ведомым звеном 4, устанавливают вместе с упорными элементами на выходном валу, а управление заклиниванием и расклиниванием упорных элементов производит через зубчатые щеки 13 и 14.
При повернутом в обратном направлении ведущем звене 2 и вращении его против часовой стрелки, зона взаимодействия ведущего звена 2 и эксцентрика 17, а значит и ведомого звена (зона взаимодействия из положения I до положения III, см. фиг. 8), будет находиться вне точки O2, вокруг которой производят смещение оси вращения средства изменения передаточного отношения. (Из положения III до положения I взаимодействие не осуществляется).
При необходимости в вариаторе (см. фиг.2) прерывают поток мощности смещением вдоль оси вала 3, втулки 24 через коромысло 23 и тягу 22. В этом случае нажимное устройство 25, состоящее из пластин 26 и штанг 27, передвигаясь вдоль оси, поворачивает щеки 5 относительно ведомого звена 4, конической частью 28 (см. фиг. 4). Щеки 5, поворачиваясь относительно ведомого звена 4, размыкают контакт между ведомым звеном 4 и выходным органом 6 и тем самым прерывают поток мощности.
Вариатор является обратимым, т.е. выходной орган можно использовать как ведущий, а ведомое звено как выходное.
При промежуточных значениях углов поворота средства изменения передаточного отношения 16 сообщение равномерно-уменьшенного вращательного движения ведомому звену будет происходить при других значениях передаточных отношений в интервале от 2 до 1.
При совмещении центров вращения входного вала 3 и средства изменения передаточного отношения 16 происходит одновременное касание эксцентриков 17 со всеми тремя (в данном примере) ведущими звеньями 2. В этом случае все упорные элементы на всех ведомых звеньях оказываются заклиненными со всеми выходными органами. Передаточное отношение передачи при этом равно 1.
Число пар ведущих и ведомых звеньев может быть более или менее 3. В этом случае угол взаимодействия ведущего звена будет равен 360o, деленное на количество пар ведущих и ведомых звеньев.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ МОНТАЖА И ДЕМОНТАЖА ШИНЫ КОЛЕСА ТРАНСПОРТНОГО СРЕДСТВА | 1992 |
|
RU2050288C1 |
| УСТРОЙСТВО ДЛЯ МОНТАЖА И ДЕМОНТАЖА ШИНЫ КОЛЕСА ТРАНСПОРТНОГО СРЕДСТВА | 2005 |
|
RU2323835C2 |
| ВЫСОКОМОМЕНТНЫЙ ВАРИАТОР | 2001 |
|
RU2204749C1 |
| СТЕНД ДЛЯ ИСПЫТАНИЯ ПЕРЕДАЧ | 1990 |
|
RU2010207C1 |
| НЕФРИКЦИОННЫЙ ВЫСОКОМОМЕНТНЫЙ ВАРИАТОР | 2005 |
|
RU2304734C2 |
| СПОСОБ МОНТАЖА И ДЕМОНТАЖА ШИНЫ КОЛЕСА ТРАНСПОРТНОГО СРЕДСТВА | 1994 |
|
RU2085407C1 |
| Тележечный конвейер | 1985 |
|
SU1399229A1 |
| ИМПУЛЬСНАЯ БЕССТУПЕНЧАТАЯ ПЕРЕДАЧА | 2000 |
|
RU2179674C2 |
| ИМПУЛЬСНЫЙ ВАРИАТОР | 2002 |
|
RU2229643C2 |
| Тележечный конвейер | 1986 |
|
SU1368233A1 |


Изобретение относится к машиностроению и может быть использовано в вариторах для бесступенчатого регулирования чисел оборотов выходного вала. Способ сообщения вращательного движения в вариаторе заключается в следующем: располагают ведущие и ведомые звенья на одном валу и на них устанавливают выполненные по заданным параметрам передаточного отношения направляющие. Поворотом оси средства изменения передаточного отношения осуществляют вращение от ведущего звена к ведомому по заданному закону за счет направляющих. При этом в зоне взаимодействия ведущего и ведомого звеньев эксцентриком или кулачком средства изменения передаточного отношения воздействуют на упорные элементы для их принудительного соприкосновения с выходным органом. Существенно повышается КПД, надежность и работоспособность вариатора. 5 з.п. ф-лы, 10 ил.
| RU 93000714 A1, 15.06.80 | |||
| Вариатор | 1986 |
|
SU1392295A1 |
| Вариатор | 1986 |
|
SU1370354A1 |
| Делительное приспособление к металлорежущим станкам | 1948 |
|
SU82059A1 |
