Изобретение относится к электронному устройству обработки изображения, которое использует технологию автоматического приведения изображения к совпадению и оборудование для обеспечения правильного совпадения изображений и особенно к устройству, в котором для сравнения используется несколько участков.
Многие этапы обработки изображений требуют взаимного согласования двух или более изображений по положению, на основе содержания изображений. Существуют несколько способов определения величины несовпадения, и использования обнаруженного несовпадения для приведения изображений к совпадению для дальнейшей обработки. Простейшая технология приведения к совпадению состоит в сдвигании данных одного изображения или нескольких изображений, чтобы согласовать их с одним опорным изображением. Величина произведенного при этом сдвига определяется посредством определения количественного несовпадения.
Способы определения количественного несовпадения, которые сейчас используются, включают опознавание края, опознавание точек, коррелирование сумм по рядам и столбцам, корреляцию местных участков, и другие. Эти способы во многих случаях полезны, но имеют свои ограничения в смысле точности, сложности расчетов и ограниченной применимости в некоторых ситуациях изображений.
Другой способ определения количественного несовпадения производит сравнение местного участка испытательного изображения с местным участком опорного (реперного) изображения посредством суммирования абсолютной величины разности двух местных участков на поэлементной основе.
Один из двух местных участков затем сдвигается по оси X на один пиксель, и суммирование проводят снова. Эта операция повторяется многократно, и записывают результат суммирования для каждого положения. Затем по оси X изображение смещают в первоначальное положение, и участок смещают на один пиксель по оси Y. Затем снова проводят смещение по оси X на один пиксель и суммирование затем повторяется для этого нового положения по оси Y. Такие сдвиги по оси Y с дальнейшими сдвигами по оси X и суммированием повторяют многократно. Записанные результаты суммирования затем рассматривают и отмечают минимум. Минимум в результате суммирования соответствует сдвигу на некоторое количество пикселей, наилучшим образом совмещающему изображения в пределах этого местного участка.
Количество сдвигов определяется ожидаемым максимальным несовпадением, и имеет центр в номинальном положении. Размер и положение местного участка выбирают так, чтобы туда входила деталь изображения, имеющая значительный контраст и неповторяющееся информационное содержание как в горизонтальном, так и в вертикальном направлении.
Этот способ обнаружения несовпадения похож на операцию ненормированной корреляции местных участков, но требует значительно упрощенных расчетов, так как не требуется операции умножения.
Задачей, положенной в основу данного изобретения, является создание способа и устройства обнаружения несовпадения испытываемых изображений по отношению к опорному изображению, а также способа и устройства, которые могут легко приспосабливаться для различных процессов обнаружения несовпадения.
Ограничение методов ненормированной корреляции местных участков и отыскания минимума сумм абсолютных разностей местных участков заключается в том, что для реальных объектов мира может не быть участков с достаточным контрастом и отсутствием повторимости как в горизонтальном, так и в вертикальном направлении. По данному изобретению сравнение местных участков осуществляют с использованием двух или более местных участков испытываемого изображения. Два местных участка выбирают так, чтобы в них содержалась бы ортогональная информация. Информация в двух местных участках пространственно связана, но может находиться на большом расстоянии друг от друга в пределах рамки изображения. Чтобы использовать эту концепцию с методом суммы абсолютных разностей, производят суммирование абсолютных величин разностей одного из местных участков в опорном изображении и соответствующего местного участка в испытываемом изображении пиксель за пикселем.
Затем находят сумму абсолютных разностей другого местного участка в опорном изображении и соответствующего местного участка в описываемом изображении. Эти две суммы затем складывают друг с другом и результат записывают. Два местных участка в опорном изображении затем сдвигаются по оси X на один пиксель относительно испытательного изображения, и опять проводится два суммирования и окончательное сложение, с записью результата. Два местных участка опорного изображения затем сдвигают по оси X на один пиксель относительно испытываемого изображения, и снова производят два суммирования и получение окончательной суммы. Эта операция повторяется некоторое количество раз с получением суммы сумм для каждого положения. Величина смещения по оси X затем снимается, и участки смещаются по оси Y на один пиксель. Затем производится смещение по оси X и формирование суммы сумм для этого нового положения смещения по оси Y. Это смещение по оси Y и последующий сдвиг по оси X с суммированием повторяют некоторое количество раз. Минимальная сумма суммирований соответствует смещению по пикселям, дающему наилучшее совпадение деталей в двух местных участках.
Концепция использования двух местных участков опорного изображения для сравнения с двумя местными участками испытываемого изображения может быть распространена на метод ненормированного коррелирования местных участков для определения несовпадения. Операция та же, что описано выше для двух местных участков для минимальной суммы абсолютных разностей, за исключением того, что рассчитывается сумма произведений для каждого сдвига по оси X и Y для каждого местного участка, суммы складывают и записывают результат. Когда все сдвиги закончены, рассматривают записанные результаты, и максимальная величина соответствует такому сдвигу по пикселям, который наилучшим образом согласует детали в двух местных участках.
Концепция использования двух местных участков опорного изображения для сравнения с двумя местными участками испытуемого изображения с использованием коррелирования, минимума сумм абсолютных разностей, или другого способа сравнения, может быть распространено для использования любого количества местных участков фактического изображения для сравнения с таким же числом местных участков опорного изображения, что позволяет включать в сравнение многократные пространственно связанные детали, обеспечивая таким образом надежное определение несовпадения.
В дальнейшем изобретение поясняется конкретным вариантом его выполнения со ссылкой на сопровождающие чертежи, на которых:
Фиг. 1 изображает схему восприятия изображений, выполненную данному изобретению.
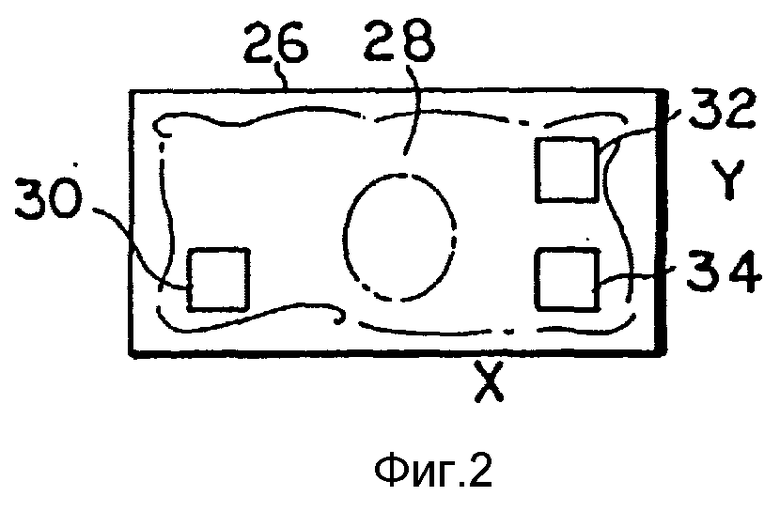
Фиг. 2 - объект, сканируемый системой по фиг. 1.
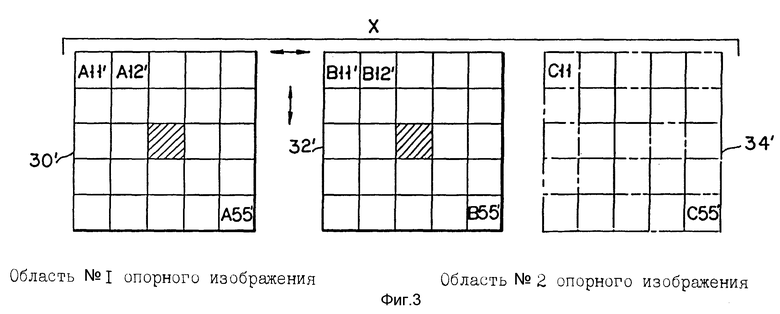
Фиг. 3 - несколько местных участков опорного участка, и
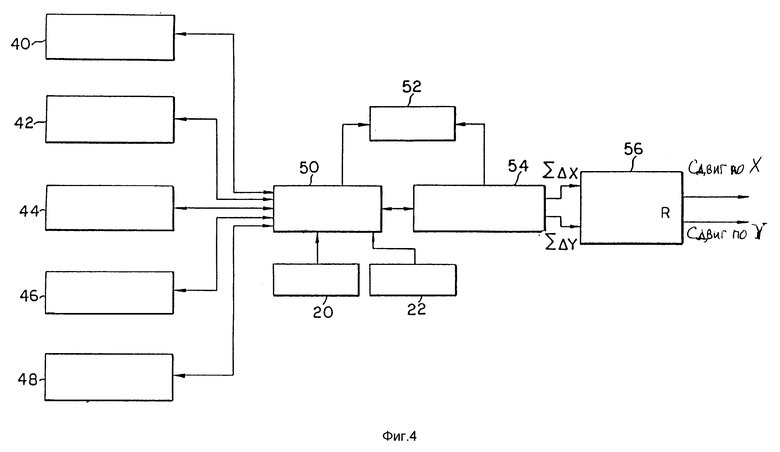
Фиг. 4 - элементы процессора изображения системы по фиг. 1.
Система восприятия изображений, раскрытая здесь, особенно подходит для сверки печатных узоров. Система 10 может содержать, например, вращающийся барабан 12, который несет лист 14 мимо сканера 16. Лист 14 может иметь напечатанное изображение в виде множества печатных узоров в прямоугольном расположении.
Сканер 16 служит для считывания листа 14 для получения его изображения для средств 18 восприятия изображения. Изображение листа 14, или по меньшей мере его частей, загружается в цифровой форме из средства 18 в память 20.
Устройство 10 также содержит другую память 22, используемую для хранения опорного листа. Два изображения из устройств памяти 20 и 22 выдаются на процессор 24 изображения, который используется для определения, смещено ли изображение со сканера 16 по одной или обеим ортогональным направлениям.
Фиг. 2 показывает банкноту с напечатанным узором 26 с листа 14, несущего изображение 28. Чтобы определить, смещено ли изображение 28, выбирают три местных участка 30, 32 и 34 и анализируют их следующим образом. Три местных участка могут быть выбраны произвольно, однако предпочтительно их выбирают так, чтобы они содержали четкие детали, простирающиеся в одном из двух ортогональных направлений X или Y. Для целей обсуждения принимается, что изображение 28 получилось печатью с одной пластинки, например, офсетным способом. Часто печатный узор печатают с нескольких наложенных изображений, причем каждое изображение является результатом другого способа печати. В таких ситуациях этапы, описанные далее, повторяют для каждого изображения, так что можно определить ортогональное смещение каждого изображения.
Каждый местный участок 30, 32, 34 предпочтительно содержит двухмерный узор из пикселей. Память 22 может либо содержать полное опорное изображение, либо местные участки опорного изображения, соответствующие участки 30, 32, 34. Эти местные опорные участки показаны на фиг. 3 в виде трех наборов пикселей 30', 32', 34'. Выгодно каждый пиксель местных участков представлять двухмерной координатой. Например, пиксель в левом верхнем углу наборов 30', 32', 34' может называться пикселем A11', B11' и C11' соответственно. Первоначально принимается, что местные участки фактического изображения 28 точно совпадают с местными участками опорного изображения. Другими словами, принимается, что центральный пиксель участка 30' (заштрихован на фиг. 3) совпадает с центральным пикселем участка 30.
Как подробнее показано на фиг. 4, процессор 24 изображения содержит пять счетчиков 40, 42, 44 ,46, 48, суммирующую цепь 50, память 52, компаратор 54 и селектор 56 сдвига. Следует понимать, что процессор изображения фиг. 4 предпочтительно реализуется на цифровом компьютере, а детали, показанные на фиг. 4, показаны лишь с целью иллюстрации. Чтобы определить, сдвинуто ли фактическое изображение памяти 20 ортогонально относительно опорного изображения памяти 22, проводят итерационный процесс следующим образом. Счетчик 40 последовательно назначает один из местных участков 30', 32', 34' опорного изображения суммирующей цепи 50. Первоначально счетчики 42, 44 обнуляются, показывая, что сдвига пока нет. Счетчики 46 и 48 используются в качестве указателей, выдающих на цепь 50 информацию о том, какой пиксель набора должен обрабатываться. После того, как счетчик 40 назначит первый местный участок 30', суммирующая цепь 50 получает величины каждого пикселя участка 30 и берет абсолютную величину разности величин каждого пикселя набора 30 и набора 30'. Таким образом, суммирующая цепь 50 рассчитывает модули разностей (A11-A11'), (A12-A12'), и так далее. Эти разности суммируют и хранят. Первое положение набора результатов размещают в памяти 52, и в положении "наилучшего согласования" также в памяти 52. Когда посчитаны разности для всех пикселей наборов 30 и 30' и заложены на хранение, счетчик 40 сдвигают на единицу, и весь процесс повторяют для наборов 32, 32' с суммированием разности от каждого пикселя с разностью расчета для того же положения для наборов 30, 30'. Другими словами, для второго набора наборов 32, 32' суммирующая цепь 50 сначала получает разность (B11-B11') и складывает эту разность с разностью (A11-A11'). Тот же процесс повторяют для каждого из других пикселей наборов 32, 32' при управлении от счетчиков 46, 48. Наконец, тот же процесс снова повторяют для третьего набора наборов 34, 34'. По окончании этих расчетов счетчик 42 сдвигают на единицу, чтобы показать, что опорные участки 30, 32', и 34' должны быть сдвинуты вдоль оси X на один пиксель. Суммирующая цепь 50 опять выполняет описанную выше работу, но на этот раз пиксели опорного изображения сдвинуты так, что, например, разность (A12-A12') рассчитывают и временно хранят, пока не будут проведены расчеты для всех трех наборов. Компаратор 54 затем сравнивает результирующее значение со значением, когда сдвига не было. Это значение запоминают во втором положении в наборе результатов памяти 52. Если новые результаты удовлетворяют определенным критериям (т.е. они равны или меньше, чем старые результаты), старая величина в положении наилучшего согласования в памяти 52 заменяется новой. Если результаты заменяют, сдвиги в направлении X и Y, как их индицируют счетчики 42, 44, также запоминают в памяти 52. Наборы 30', 32', 34' сдвигают опять заранее заданное количество раз влево и вправо от первоначального положения. После этого наборы также сдвигают вверх и вниз заранее выбранное количество раз.
Если все сдвиги и расчеты закончены, память 52 содержит набор результатов, показывающий величины в результате ортогональных смещений, а также величину наилучшего согласования и величину сдвига в направлениях X и Y, которая дает этот результат. Эта информация выдается на селектор сдвига 56, который генерирует соответствующий сдвиг по X и Y, индицирующий ортогональное смещение изображения 28 относительно опорного изображения. Результирующий набор сумм в памяти 52 может использоваться, как количественная мера, которую можно использовать для определения степени доверия к процессу.
В описанном воплощении три местных участка используются для целей иллюстрации. Следует понимать, что можно использовать любое число участков больше одного. Кроме того, другие критерии могут быть выбраны для сравнения наборов изображения и опоры без отхода от объема изобретения, как оно определено в формуле изобретения.
Изобретение относится к вычислительной технике. Его использование в системах обработки изображений позволяет не только обнаруживать несовпадение фактического изображения относительно опорного, но и обеспечивать их максимальное совпадение. Этот технический результат достигается благодаря тому, что воспринимают два участка фактического изображения, запоминают два аналогичных участка опорного изображения, сравнивают соответствующие участки фактического и опорного изображений и определяют наличие сдвига, причем повторяют сравнение для тех же участков после сдвига фактического изображения на заранее заданное число пикселей по осям X и Y, при этом вычисляют абсолютные значения разностей между соответствующими участками фактического и опорного изображений для каждого сдвига и сохраняют в памяти как эти абсолютные значения, так и сумму. Устройство по изобретению содержит соответствующие средства для выполнения указанной последовательности действий. 2 с. и 3 з.п.ф-лы, 4 ил.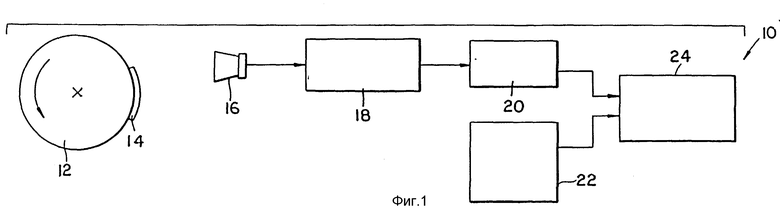
| Устройство для распознавания изображений | 1983 |
|
SU1215123A1 |
| US 4449240 А, 15.05.84 | |||
| УСТРОЙСТВО для ПРЕОБРАЗОВАНИЯ ИЗОБРАЖЕНИЙ | 0 |
|
SU294159A1 |
| Устройство для контроля бумажных денег | 1974 |
|
SU549823A1 |
| Устройство для идентификации цветных изображений | 1976 |
|
SU652578A1 |
| Способ определения направления контурной линии на изображении объекта и устройство для его осуществления | 1983 |
|
SU1414329A3 |
| US 4677680 А, 30.06.87 | |||
| Бутаков Е.А | |||
| и др | |||
| Обработка изображений на ЭВМ | |||
| -М.: Радио и связь, 1987, с.180-181, рис | |||
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |

