Изобретение относится к области измерительной техники, в частности к измерению переменных электрических величин.
Известно устройство для измерения переменной величины, состоящее из последовательно включенных трансреактора, формирующего электрический сигнал, пропорциональный производной измеряемой величины - переменного тока, и интегратора, восстанавливающего измеряемую величину [1, с. 88].
Но использование интегратора вызывает появление значительных погрешностей, обусловленных влиянием, во-первых, начальной фазы измеряемого сигнала и, во-вторых, постоянных помех на результат интегрирования.
Наиболее близким к заявляемому устройству является устройство для измерения переменной величины, содержащее дифференцирующий измерительный преобразователь этой величины, выходом подключенный ко входу электрического фильтра, выход которого является выходом устройства, причем число нулей передаточной функции фильтра на единицу меньше числа ее полюсов [2, с. 26 - 29] . Фильтр является апериодическим звеном первого порядка с передаточной функцией Kф/(S+ωп), где Кф - коэффициент передачи, имеющий размерность частоты, ωп - полюс, S - аргумент преобразования Лапласа. При ωп = 0 апериодическое звено превращается в интегратор. Асимптотическое выражение высокочастотного участка амплитудной частотной характеристики этого звена есть обратная частоте зависимость (как у идеального интегратора).
Относительная амплитудная погрешность измерения переменной синусоидальной величины, изменяющейся с круговой частотой ω, в установившемся режиме равная
и фазовая погрешность
тем меньше, чем меньше ωп в сравнении с ω.
Однако известное устройство имеет следующие недостатки:
- значительная амплитудная погрешность измерения;
- искажение формы измеряемой несинусоидальной переменной величины, т.к. фазовые погрешности обратны частотам составляющих ее гармоник, а для сохранения формы измеряемой величины необходима, наоборот, пропорциональная зависимость;
- во время переходного процесса, протекающего после начала измерения, максимальная погрешность значительно превосходит установившуюся амплитудную погрешность. Ее относительное значение примерно равно ωп/ω. Снижение этой погрешности ограничивается техническими возможностями реализации малого значения ωп;
- при уменьшении ωп в большей степени проявляется третий недостаток, заключающийся в усилении постоянной составляющей помехи, проходящей вместе с полезным сигналом через апериодическое звено, в Kф/ωп раз;
- переменные составляющие помехи, имеющиеся в измеряемой величине или в первом электрическом напряжении на входе фильтра, преобразуются вместе с полезным сигналом, искажая результат измерения.
Задачей, на решение которой направлено предлагаемое изобретение, является повышение точности измерения переменной величины.
Технический результат, достигаемый при решении поставленной задачи, выражается в снижении амплитудной и фазовой погрешностей измерения и уменьшении тем самым искажения формы измеряемой величины, снижении максимальной погрешности в переходном процессе и уменьшении погрешностей, вызванных постоянными и переменными составляющими сигналов помех.
Поставленная задача решается тем, что устройство для измерения переменной величины, содержащее дифференцирующий измерительный преобразователь этой величины, выходом подключенный ко входу электрического фильтра, выход которого является выходом устройства, причем число нулей передаточной функции фильтра на единицу меньше числа ее полюсов, отличается тем, что у передаточной функции фильтра число полюсов не менее двух, каждый из которых имеет отрицательную действительную часть.
Кроме того, электрический фильтр имеет передаточную функцию с нулем в начале координат.
Поставленная задача решается также тем, что электрический фильтр имеет передаточную функцию с высокодобротными нулями, частоты которых равны частотам сигналов помех, преобразуемых вместе с измеряемой величиной, а действительные части этих нулей отрицательны.
Кроме того, передаточная функция электрического фильтра имеет два равных действительных полюса и отрицательный действительный нуль, модуль которого в два раза больше модуля полюса.
Так как у фильтра число нулей на единицу меньше числа полюсов, то асимптотическое выражение высокочастотного участка амплитудной частотной характеристики фильтра является обратно пропорциональной зависимостью, как у интегратора, что позволяет восстановить исходный сигнал по его производной.
Отрицательные действительные части полюсов фильтра обеспечивают его устойчивость.
Фильтр с нулем в начале координат не пропускает постоянную составляющуют сигнала на его входе, тем самым ликвидируя влияние постоянной помехи.
Высокодобротные нули передаточной функции фильтра, действительные части которых отрицательны, а частоты равны частотам сигналов помех, обеспечивают подавление этих помех.
Фильтр с передаточной функцией, имеющей два равных действительных полюса и отрицательный действительный нуль, модуль которого в два раза больше модуля полюса, обеспечивает минимальную переходную составляющую помехи.
Сопоставительный анализ признаков заявляемого решения и признаков аналога и прототипа свидетельствует о соответствии заявляемого решения критерию "новизна".
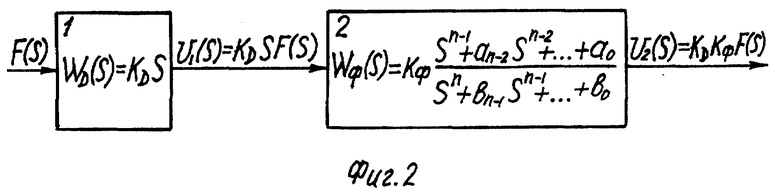
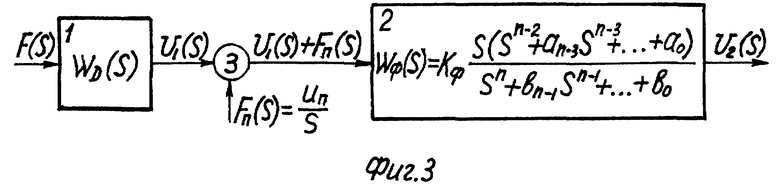
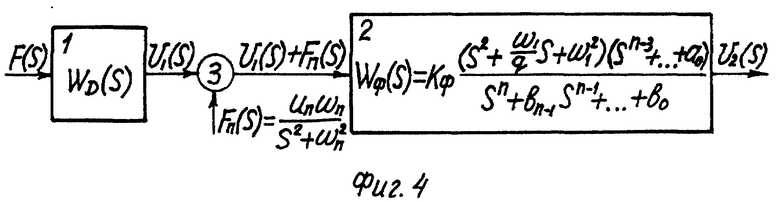
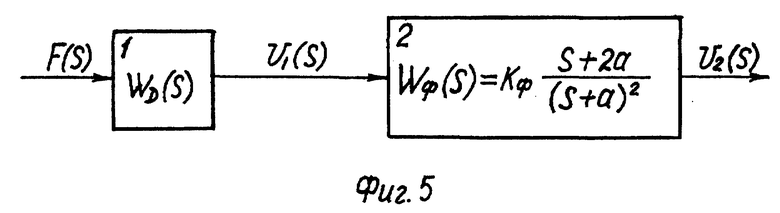
Изобретение поясняется чертежами. На фиг. 1 представлена структурная схема устройства для измерения переменной величины. На фиг. 2 приведено математическое описание функционирования компонентов устройства. На фиг. 3 показана компенсация влияния постоянной помехи на результат измерения. На фиг. 4 представлена нейтрализация переменных сигналов помехи. На фиг. 5 показано измерение переменного сигнала с использованием фильтра второго порядка, минимизирующего ошибку измерения.
На вышеперечисленных чертежах: 1 - дифференцирующий измерительный преобразователь, 2 - электрический фильтр и 3 - элемент суммирования, вводящий помеху в измерительный канал.
Заявленное устройство функционирует следующим образом.
Измеряемая величина (электрическая, механическая, иная физическая) F(t) посредством дифференцирующего измерительного преобразователя 1 (трансформатора, тахогенератора, акселерометра, иного дифференциатора) преобразуется в первое электрическое напряжение U1(t), пропорциональное производной dF(t)/dt измеряемой величины F(t)•KD - коэффициент пропорциональности преобразования. Напряжение U1(t) затем преобразуется электрическим фильтром 2 во второе электрическое напряжение U2(t), пропорциональное действительному значению измеряемой переменной величины. Kф - коэффициент пропорциональности фильтра. Следовательно, U2(t)≈KDKфF(t). Передаточная функция (ПФ) первого, дифференцирующего измерительного преобразователя WD(S)=KDS. ПФ второго преобразователя, коим является фильтр.
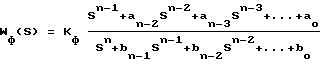
может быть представлена в виде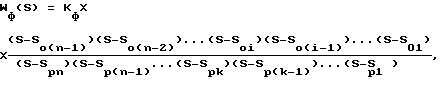
где Sрк - полюсы, а Soi - нули ПФ фильтра. В общем случае полюсы и нули являются комплексными числами вида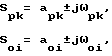
где ωpk,ωoi - частоты соответственно полюсов и нулей, а aрк, aoi - действиительные части полюсов и нулей. Используется фильтр, у которого все aрк<0. Этим обеспечивается устойчивость преобразования сигнала U1(t) в сигнал U2(t). Фильтр с нулем в начале координат (So(n-1)=0), ПФ которого приведена на фиг. 3, не пропускает постоянную составляющую сигнала и тем самым ликвидирует влияние постоянной помехи. Действительно, в этом случае установившееся значение реакции фильтра на основе теоремы операционного исчисления о предельном значении оригинала (изображение по Лапласу постоянного сигнала помехи Uп равно Uп/S)
Высокодобротные нули ПФ фильтра, частоты которых равны частотам помех, обеспечивают подавление этих помех. Так, переменный сигнал помехи Fп(t) = Uпsinωпt на входе фильтра имеет изображение Fп(S) = Uпωп/(S2+ω
(S-S01)(S-S02) = S2+2aoS+a
Это выражение можно представить в виде
где ω1 - частота нулей, q - добротность нулей. При высокой добротности (q _→ ∞) и при ω1_→ ωп сомножитель в числителе  стремится к выражению S2+ω
стремится к выражению S2+ω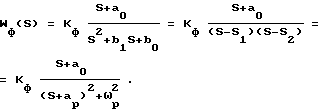
ПФ по ошибке измерительного канала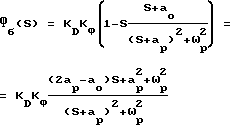
Амплитудная частотная характеристика измерительного канала по ошибке при переменном входном сигнале F(t) = Asinωt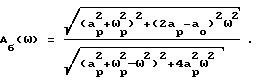
Aб(ω) (амплитудное, наибольшее значение установившегося значения ошибки измерения) уменьшается при aо=2ap и при стремлении ap и ωp к нулю. Но ap и ωp не могут быть одновременно равными нулю, т.к. фильтр при этом приводится к интегратору с его недостатками. При условии ao=2ap ПФ фильтра имеет вид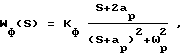
а ПФ по ошибке измерения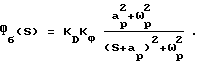
При изображении переменного входного сигнала F(t) = Asinωt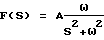
изображение ошибки измерения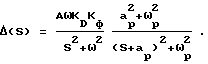
При условии, что ap и ωp значительно меньше ω, переходная составляющая Δ(t) может быть представлена как
Исследование Δ(t)пер показывает, что она минимизируется при ωp = 0. Таким образом, оба полюса ПФ фильтра действительны и равны. Минимизируемая при этом фазовая ошибка позволяет сохранить форму сигнала.
Использование предлагаемого устройства для измерения переменной величины дает возможность получить требуемую точность измерения гармонических переменных величин, минимизирует искажающий эффект при измерении негармонических переменных величин, исключает влияние постоянных помех и дает возможность подавлять переменные помехи.
Источники информации
1. Семенко Н. Г. , Гамазов Ю.А. Измерительные преобразователи больших электрических токов и их метрологическое обеспечение. М.: Изд-во стандартов, 1984, 132 с.
2. Кувшинов Г.Е., Урываев К.П. Интегратор инфранизких частот //Магнитно-полупроводниковые и электромашинные элементы автоматики/ Межвузовский сборник статей. Вып. 4. - Рязань: Изд-во РРТИ, 1975, 140 с.
Изобретение относится к измерительной технике и предназначено для использования при осуществлении измерений электрических, механических или иных переменных физических величин. Устройство включает в себя дифференцирующий измерительный преобразователь и электрический фильтр. Число нулей передаточной функции фильтра выбрано на единицу меньше числа ее полюсов, а число полюсов составляет не менее двух, причем каждый из них имеет отрицательную действительную часть. Передаточная функция фильтра имеет нуль в начале координат. Высокодобротные нули передаточной функции характеризуются частотами, равными частотам сигналов помех, преобразуемых вместе с измеряемой величиной, а действительные части этих нулей отрицательны. Передаточная функция фильтра имеет два равных действительных полюса и отрицательный действительный нуль, модуль которого в два раза больше модуля полюса. Это позволяет уменьшить амплитудную и фазовую погрешности и в конечном счете повысить точность измерения переменной величины. 3 з.п.ф-лы, 5 ил.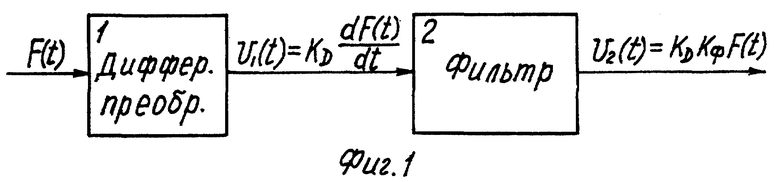
| Кувшинов Г.Е., Урываев К.П | |||
| Интегратор инфранизких частот | |||
| - Магнитно-полупроводниковые и электромашинные элементы автоматики | |||
| Межвузовский сборник статей | |||
| - Рязань: РРТИ, 1975, вып.4, с.26-29 | |||
| ДИФФЕРЕНЦИАЛЬНЫЙ ДАТЧИК ДЛЯ ИЗМЕРЕНИЯ ТОКА | 0 |
|
SU186027A1 |
| Устройство для измерения тока | 1987 |
|
SU1432410A2 |
