Изобретение относится к электротехнике и может быть использовано для управления электрическими машинами переменного тока, статорная обмотка которых подключена к потребителям электроэнергии, а роторная получает питание от регулируемого преобразователя частоты, в частности в ветроэнергетике для управления асинхронизированными синхронными генераторами автономных ветроэнергетических установок.
Известно устройство для управления двигателем двойного питания, выполненным на базе асинхронного двигателя с фазным ротором, содержащее двигатель двойного питания, третий арифметический блок, частотный компаратор, управляемый аналоговый коммутатор, второй интегратор, второй сумматор, умножители, блок преобразований токов статора и датчик фазных токов статора (см. авт. св. СССР 1610589, БИ 44, 1991).
Недостаток известного решения заключается в невозможности стабилизации напряжения статора асинхронизированного синхронного генератора при изменении частоты вращения его ротора, нагрузки потребителей и внутренних переменных самого генератора, т.к. в данном устройстве рассматривается работа двигателя двойного питания, а не автономного асинхронизированного синхронного генератора.
Известно также устройство для управления асинхронизированным синхронным генератором, содержащее преобразователь частоты, подключенный к роторной цепи асинхронизированного синхронного генератора, датчики тока и напряжения статорной цепи асинхронизированного синхронного генератора, датчик частоты вращения, установленный на роторе асинхронизированного синхронного генератора, последовательно соединенные датчик углового положения ротора, непосредственно связанный с ротором асинхронизированного синхронного генератора и формирователь гармонических функций частоты скольжения (см. авт. св. СССР 1399885, БИ 20, 1986).
Данное устройство по своей технической сущности является наиболее близким к предлагаемому изобретению.
Однако в этом устройстве не обеспечивается стабилизация напряжения статора асинхронизированного синхронного генератора, т. к. в данном устройстве рассматривается работа асинхронизированного синхронного генератора параллельно с мощной сетью. Поэтому устройство-прототип нельзя использовать для качественной стабилизации выходного напряжения автономной установки. В этом случае изменение частоты вращения ротора, нагрузки потребителей или внутренних переменных самого генератора приводит к изменению напряжения статора асинхронизированного синхронного генератора (выходного напряжения ветроэнергетической установки). Поэтому должны быть сформированы дополнительные сигналы управления, обеспечивающие компенсацию вредного влияния указанных выше параметров на напряжение статора асинхронизированного синхронного генератора.
Задачей, на решение которой направлено заявляемое техническое решение, является обеспечение качественной стабилизации напряжения статора асинхронизированного синхронного генератора при изменении частоты вращения его ротора, нагрузки потребителей и внутренних переменных самого генератора.
Технический результат, который может быть получен при реализации заявляемого технического решения, выражается в формировании дополнительных сигналов управления, подаваемых на входы преобразователя частоты, компенсирующих вредное воздействие изменений частоты вращения ротора, нагрузки потребителей и внутренних переменных генератора на качество стабилизации выходного напряжения генератора.
Поставленная задача решается тем, что в устройство для управления асинхронизированным синхронным генератором, содержащее преобразователь частоты, подключенный к роторной цепи асинхронизированного синхронного генератора, датчики тока и напряжения статорной цепи асинхронизированного синхронного генератора, датчик частоты вращения, установленный на роторе асинхронизированного синхронного генератора, последовательно соединенные датчик углового положения ротора, непосредственно связанный с ротором асинхронизированного синхронного генератора, и формирователь гармонических функций частоты скольжения, дополнительно вводятся последовательно соединенные первый преобразователь координат, подключенный тремя входами к трем соответствующим выходам датчика напряжения статорной цепи, векторный анализатор, первый сумматор, второй вход которого подключен к выходу задатчика напряжения, первый интегратор, второй сумматор, второй преобразователь координат и третий преобразователь координат, три выхода которого подключены к трем управляющим входам преобразователя частоты, последовательно соединенные четвертый преобразователь координат, подключенный тремя входами к трем соответствующим выходам датчика тока статорной цепи, пятый преобразователь координат, третий сумматор, второй интегратор и четвертый сумматор, соединенный выходом со вторым входом второго преобразователя координат, а вторым входом - с выходом третьего сумматора, последовательно соединенные усилитель, вход которого подключен к выходу датчика частоты вращения, и первый блок умножения, подключенный выходом к третьему входу четвертого сумматора, последовательно соединенные пятый сумматор, первый вход которого подключен ко второму выходу пятого преобразователя координат, а второй вход - к выходу векторного анализатора, и третий интегратор, соединенный выходом со вторым входом второго сумматора, третий вход которого подключен к выходу пятого сумматора, последовательно соединенные задающий генератор и шестой преобразователь координат, два выхода которого соединены соответственно с третьим и четвертым входами второго преобразователя координат, а третий и четвертый входы - с соответствующими выходами формирователя гармонических функций частоты скольжения, последовательно соединенные выпрямитель, подключенный входами к статорным обмоткам асинхронизированного синхронного генератора, и аккумуляторная батарея, питающая преобразователь частоты, а также второй, третий и четвертый блоки умножения, первые входы которых подключены к выходу усилителя, причем третий и четвертый входы пятого преобразователя координат соединены с соответствующими выходами задающего генератора, второй вход первого блока умножения соединен с выходом третьего интегратора и вторым входом третьего сумматора, второй вход второго блока умножения соединен с выходом второго интегратора и третьим входом пятого сумматора, а выход - с четвертым входом второго сумматора, второй вход третьего блока умножения соединен с выходом пятого сумматора, а выход - с четвертым входом четвертого сумматора, второй вход четвертого блока умножения соединен с выходом третьего сумматора, а выход - с пятым входом второго сумматора.
Сопоставительный анализ заявляемого технического решения с известными аналогами и прототипом показывает, что заявляемое устройство соответствует критерию "новизна".
Заявленная совокупность признаков, приведенная в отличительной части формулы изобретения, позволяет стабилизировать напряжение статора асинхронизированного синхронного генератора при изменениях частоты вращения ротора, нагрузки потребителей электроэнергии и внутренних переменных самого генератора, что в результате позволяет получить высокое качество стабилизации выходного напряжения ветроэнергетической установки.
Блок-схема предлагаемого устройства для управления асинхронизированным синхронным генератором представлена на чертеже.
Устройство для управления асинхронизированным синхронным генератором содержит преобразователь частоты 1, подключенный к роторной цепи асинхронизированного синхронного генератора 2, датчики тока 3 и напряжения 4 статорной цепи асинхронизированного синхронного генератора 2, датчик 5 частоты вращения, установленный на роторе асинхронизированного синхронного генератора 2, последовательно соединенные датчик 6 углового положения ротора, непосредственно связанный с ротором асинхронизированного синхронного генератора 2, и формирователь 7 гармонических функций частоты скольжения, последовательно соединенные первый преобразователь 8 координат, подключенный тремя входами к трем соответствующим выходам датчика 4 напряжения статорной цепи, векторный анализатор 9, первый сумматор 10, второй вход которого подключен к выходу задатчика 11 напряжения, первый интегратор 12, второй сумматор 13, второй преобразователь 14 координат и третий преобразователь 15 координат, три выхода которого подключены к трем управляющим входам преобразователя частоты 1, последовательно соединенные четвертый преобразователь 16 координат, подключенный тремя входами к трем соответствующим выходам датчика 3 тока статорной цепи, пятый преобразователь 17 координат, третий сумматор 18, второй интегратор 19 и четвертый сумматор 20, соединенный выходом со вторым входом второго преобразователя 14 координат, а вторым входом - с выходом третьего сумматора 18, последовательно соединенные усилитель 21, вход которого подключен к выходу датчика 5 частоты вращения, и первый блок 22 умножения, подключенный выходом к третьему входу четвертого сумматора 20, последовательно соединенные пятый сумматор 23, первый вход которого подключен ко второму выходу пятого преобразователя 17 координат, а второй вход - к выходу векторного анализатора 9, и третий интегратор 24, соединенный выходом со вторым входом второго сумматора 13, третий вход которого подключен к выходу пятого сумматора 23, последовательно соединенные задающий генератор 25 и шестой преобразователь 26 координат, два выхода которого соединены соответственно с третьим и четвертым входами второго преобразователя 14 координат, а третий и четвертый входы - с соответствующими выходами формирователя 7 гармонических функций частоты скольжения, последовательно соединенные выпрямитель 27, подключенный входами к статорным обмоткам асинхронизированного синхронного генератора 2, и аккумуляторная батарея 28, питающая преобразователь частоты 1, а также второй 29, третий 30 и четвертый 31 блоки умножения, первые входы которых подключены к выходу усилителя 21, причем третий и четвертый входы пятого преобразователя 17 координат соединены с соответствующими выходами задающего генератора 25, второй вход первого блока 22 умножения соединен с выходом третьего интегратора 24 и вторым входом третьего сумматора 18, второй вход второго блока 29 умножения соединен с выходом второго интегратора 19 и третьим входом пятого сумматора 23, а выход - с четвертым входом второго сумматора 13, второй вход третьего блока 30 умножения соединен с выходом пятого сумматора 23, а выход - с четвертым входом четвертого сумматора 20, второй вход четвертого блока 31 умножения соединен с выходом третьего сумматора 18, а выход - с пятым входом второго сумматора 13.
На чертеже введены следующие обозначения:
I1х, I1y - проекции тока статора на соответствующие оси координат; проекции потокосцепления статора на соответствующие оси координат и их производные;
проекции потокосцепления статора на соответствующие оси координат и их производные;
Ux - проекция исходного управляющего сигнала;
Ukx, Uky - проекции скорректированных управляющих сигналов;
U1m - амплитуда напряжения статора;
Uзх - сигнал задания напряжения.
Устройство работает следующим образом.
Статор асинхронизированного синхронного генератора 2 работает на трехфазную нагрузку. Напряжение в его роторную цепь подают от преобразователя частоты 1, который получает питание от аккумуляторной батареи 28. В процессе работы ветроэнергетической установки эта батарея подзаряжается через выпрямитель 27.
Для стабилизации напряжения статора асинхронизированного синхронного генератора 2 осуществляют регулирование напряжения ротора указанного генератора с помощью преобразователя частоты 1. При работе ветроэнергетической установки происходит изменение (в широких пределах) частоты вращения ротора асинхронизированного синхронного генератора, нагрузки потребителей и переменных самого генератора. Это приводит к снижению качества выходного напряжения ветроэнергетической установки и даже к потере устойчивости ее работы.
Работу асинхронизированного синхронного генератора 2 описывают следующими дифференциальными уравнениями в проекциях на оси прямоугольной системы координат x, y, вращающейся с частотой тока статора ω1


Ψ1x = I1x•L1+I2x•L12,
Ψ1y = I1y•L1+I2y•L12,
Ψ2x = I1x•L12+I2x•L2,
Ψ2y = I1y•L12+I2y•L2,
где U1x, U1y, U2x, U2y - проекции напряжений статора и ротора на соответствующие оси координат; I2x, I2y - проекции тока ротора на соответствующие оси координат; Ψ2x,Ψ2y - проекции потокосцепления ротора на соответствующие оси координат; R1, R2 - активные сопротивления статорной и роторной обмоток соответственно; L1, L2 - индуктивности статорной и роторной обмоток соответственно; L12 - взаимная индуктивность статора и ротора; Rн, Lн - активное сопротивление и индуктивность нагрузки соответственно; ω2 = ω1-pn•ω - частота тока ротора; ω - частота вращения ротора; рn - число пар полюсов.
Работу преобразователя частоты 1 в цепи ротора описывают следующими уравнениями:
где Ктп - коэффициент передачи преобразователя частоты; Ттп - постоянная времени преобразователя частоты.
Дифференциальные уравнения, описывающие совместную работу асинхронизированного синхронного генератора 2 и преобразователя частоты 1, имеют вид: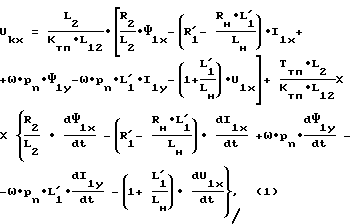
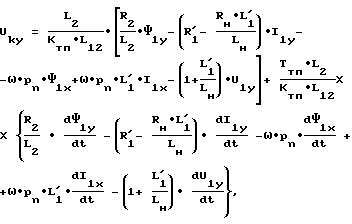

Скорректированные управляющие сигналы Ukx и Uky формируют проекции напряжения статора асинхронизированного синхронного генератора U1x, U1y, то есть формируют выходное напряжение ветроэнергетической установки. К качеству этого напряжения, поступающего к потребителям электроэнергии, предъявляются достаточно высокие требования. Однако параметры этих уравнений (1), а следовательно, и проекции напряжения статора асинхронизированного синхронного генератора зависят от ряда существенно изменяющихся в процессе работы ветроэнергетической установки величин: частоты вращения ротора ω, активного сопротивления Rн и индуктивности Lн нагрузки, а также от переменных самого генератора, обусловленных наличием внутренних связей (проекции тока I1x, I1y и потокосцепления Ψ1x, Ψ1y статора и их производные). В результате для реализации поставленной выше задачи необходимо сформировать такое корректирующее устройство, которое позволяло бы скомпенсировать влияние всех перечисленных выше параметров на проекции напряжения статора асинхронизированного синхронного генератора.
Измеренные датчиком 4 значения трехфазных напряжений статора сначала преобразуются первым преобразователем 8 координат в двухфазные, а затем векторный анализатор 9 вычисляет амплитуду напряжения статора Ulm.
Первый сумматор 10 вычисляет разность между сигналом задания напряжения Uзх, вырабатываемым задатчиком 11 напряжения, и сигналом U1m. Эта разность поступает на вход первого интегратора 12, работа которого описывается следующим уравнением:
Ux = Kpeз•∫(Uзx-U1m)•dt
где Кpeг - коэффициент передачи регулятора, обеспечивающего скомпенсированной системе требуемые показатели качества.
Задающий генератор 25 вырабатывает эталонные сигналы sin(ω1•t) и cos(ω1•t), поступающие на входы пятого 17 и шестого 26 преобразователей координат. Шестой преобразователь 26 координат на основе информации, получаемой от задающего генератора 25 и формирователя 7 гармонических функций частоты скольжения, вырабатывающего сигналы sin(ϕэл) и cos(ϕэл) , формирует сигналы sin(ω1•t-ϕэл) и cos(ω1•t-ϕэл), где ϕэл - электрический угол поворота ротора относительно статора.
Измеренные датчиком 3 значения трехфазных токов статора сначала преобразуются четвертым преобразователем 16 координат в двухфазные, а затем пятым преобразователем 17 координат с помощью информации, получаемой от задающего генератора 25, - в их проекции на оси координат x, y.
Первый отрицательный вход третьего сумматора 18 (со стороны пятого преобразователя 17 координат) имеет коэффициент усиления R1, а второй отрицательный (со стороны третьего интегратора 24) - ω1. В результате на его выходе формируется сигнал который затем интегрируется вторым интегратором 19.
который затем интегрируется вторым интегратором 19.
Первый отрицательный вход пятого сумматора 23 (со стороны пятого преобразователя 17 координат) имеет коэффициент усиления R1, второй отрицательный (со стороны векторного анализатора 9) - 1, а третий положительный (со стороны второго интегратора 19) - ω1. В результате на его выходе формируется сигнал 
который затем интегрируется третьим интегратором 24.
Усилитель 21 имеет коэффициент усиления рn, равный числу пар полюсов.
Первый положительный вход второго сумматора 13 (со стороны первого интегратора 12) имеет коэффициент усиления, равный  второй положительный (со стороны третьего интегратора 24) -
второй положительный (со стороны третьего интегратора 24) -  третий положительный (со стороны пятого сумматора 23) -
третий положительный (со стороны пятого сумматора 23) -  четвертый положительный (со стороны второго блока 29 умножения) -
четвертый положительный (со стороны второго блока 29 умножения) -  а пятый положительный (со стороны четвертого блока 31 умножения) -
а пятый положительный (со стороны четвертого блока 31 умножения) -  . В результате на его выходе формируется сигнал:
. В результате на его выходе формируется сигнал:
Первый положительный вход четвертого сумматора 20 (со стороны второго интегратора 19) имеет коэффициент усиления  второй положительный (со стороны третьего сумматора 18) -
второй положительный (со стороны третьего сумматора 18) -  третий отрицательный (со стороны первого блока 22 умножения) -
третий отрицательный (со стороны первого блока 22 умножения) -  а четвертый отрицательный (со стороны третьего блока 30 умножения) -
а четвертый отрицательный (со стороны третьего блока 30 умножения) -  . В результате на его выходе формируется сигнал:
. В результате на его выходе формируется сигнал:
Управляющие сигналы Ukx и Uky поступают на входы второго преобразователя 14 координат, который, используя информацию, получаемую от шестого преобразователя 26 координат, преобразует проекции скорректированных управляющих сигналов Ukx, Uky из системы координат x, y в роторную систему координат d, q. А затем третий преобразователь 15 координат преобразует указанные сигналы из двухфазных координат в трехфазные, подавая соответствующие сигналы на управляющие входы преобразователя частоты 1.
Управляющие сигналы Ukx (2) и Uky (3) обеспечивают компенсацию влияния изменяющихся частоты вращения ротора, параметров нагрузки и внутренних переменных асинхронизированного синхронного генератора на напряжение его статорной цепи и превращают уравнения (1) с существенно переменными параметрами в уравнения вида:
Как видно из уравнений (4), введенная коррекция обеспечивает компенсацию не всех изменяющихся переменных. Однако, как показали результаты проведенных исследований, влияние оставшихся нескомпенсированных переменных на качество стабилизации напряжения статора асинхронизированного генератора незначительно и им можно пренебречь.
Таким образом, за счет дополнительного введения первого 8, второго 14, третьего 15, четвертого 16, пятого 17 и шестого 26 преобразователей координат, векторного анализатора 9, первого 10, второго 13, третьего 18, четвертого 20 и пятого 23 сумматоров, задатчика 11 напряжения, первого 12, второго 19 и третьего 24 интеграторов, усилителя 21, первого 22, второго 29, третьего 30 и четвертого 31 блоков умножения, задающего генератора 25, выпрямителя 27 и аккумуляторной батареи 28 удалось компенсировать вредное влияние изменяющихся частоты вращения ротора асинхронизированного синхронного генератора, параметров нагрузки и переменных самого генератора на качество напряжения статора указанного генератора. Это позволяет стабилизировать выходное напряжение ветроэнергетической установки с высокой точностью.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ АСИНХРОНИЗИРОВАННЫМ СИНХРОННЫМ ГЕНЕРАТОРОМ | 2000 |
|
RU2189105C2 |
| Способ регулирования возбуждения асинхронизированной синхронной машины и устройство для его осуществления | 1991 |
|
SU1838871A3 |
| ЭЛЕКТРОПРИВОД С СИНХРОННЫМ ДВИГАТЕЛЕМ | 1995 |
|
RU2092967C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПРИВОДОМ РОБОТА | 1992 |
|
RU2028930C1 |
| СИСТЕМА ВЕКТОРНОГО УПРАВЛЕНИЯ СКОРОСТЬЮ АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ | 2006 |
|
RU2317632C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПРИВОДОМ РОБОТА | 2000 |
|
RU2189306C2 |
| САМОНАСТРАИВАЮЩИЙСЯ ЭЛЕКТРОПРИВОД РОБОТА | 1990 |
|
RU2037173C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ДВИГАТЕЛЕМ ДВОЙНОГО ПИТАНИЯ | 2011 |
|
RU2477562C1 |
| УСТРОЙСТВО ДЛЯ ПРОГРАММНОГО УПРАВЛЕНИЯ МАНИПУЛЯТОРОМ | 1994 |
|
RU2054349C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПРИВОДОМ РОБОТА | 1994 |
|
RU2079867C1 |
Изобретение относится к электротехнике и может быть использовано в автономных ветроэнергетических установках. Технический результат заключается в повышении качества стабилизации напряжения статора асинхронизированного синхронного генератора при изменении частоты вращения его ротора, нагрузки потребителей и внутренних переменных самого генератора. Для этого в устройстве для управления асинхронизированным синхронным генератором для формирования необходимых корректирующих сигналов введены шесть преобразователей координат (8), (14), (15), (16), (17) и (26), векторный анализатор (9), пять сумматоров (10), (13), (18), (20) и (23), задатчик (11) напряжения, три интегратора (12), (19) и (24), усилитель (21), четыре блока умножения (22), (29), (30) и (31), задающий генератор (25), выпрямитель (27) и аккумуляторная батарея (28). Введение коррекции позволит компенсировать влияние указанных выше величин и стабилизировать напряжение статора асинхронизированного синхронного генератора с высокой точностью. 1 ил.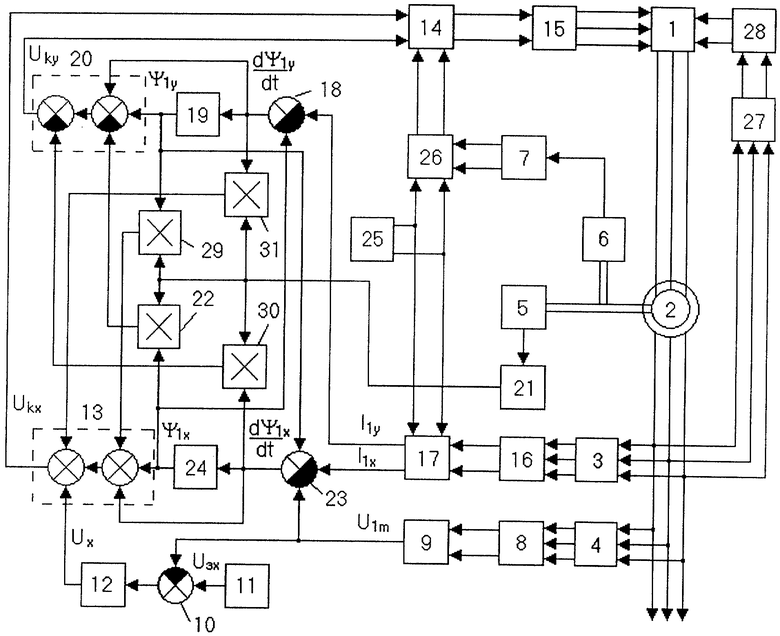
Устройство для управления асинхронизированным синхронным генератором, содержащее преобразователь частоты, подключенный к роторной цепи асинхронизированного синхронного генератора, датчики тока и напряжения статорной цепи асинхронизированного синхронного генератора, датчик частоты вращения, установленный на роторе асинхронизированного синхронного генератора, последовательно соединенные датчик углового положения ротора, непосредственно связанный с ротором асинхронизированного синхронного генератора и формирователь гармонических функций частоты скольжения, отличающееся тем, что в него дополнительно вводятся последовательно соединенные первый преобразователь координат, преобразующий трехфазные напряжения статора в двухфазные и подключенный тремя входами к трем соответствующим выходам датчика напряжения статорной цепи, векторный анализатор, первый сумматор, второй вход которого подключен к выходу задатчика напряжения, первый интегратор, второй сумматор, второй преобразователь координат, который преобразует проекции скорректированных управляющих сигналов из системы координат x, y в роторную систему координат d, q, и третий преобразователь координат, преобразующий сигналы на его входах из двухфазных координат в трехфазные, три выхода которого подключены к трем управляющим входам преобразователя частоты, последовательно соединенные четвертый преобразователь координат, преобразующий трехфазные токи статора в двухфазные и подключенный тремя входами к трем соответствующим выходам датчика тока статорной цепи, пятый преобразователь координат, преобразующий двухфазные токи статора в их проекции на оси координат x, y, третий сумматор, второй интегратор и четвертый сумматор, соединенный выходом со вторым входом второго преобразователя координат, а вторым входом - с выходом третьего сумматора, последовательно соединенные усилитель, вход которого подключен к выходу датчика частоты вращения, и первый блок умножения, подключенный выходом к третьему входу четвертого сумматора, последовательно соединенные пятый сумматор, первый вход которого подключен ко второму выходу пятого преобразователя координат, а второй вход - к выходу векторного анализатора и третий интегратор, соединенный выходом со вторым входом второго сумматора, третий вход которого подключен к выходу пятого сумматора, последовательно соединенные задающий генератор и шестой преобразователь координат, формирующий сигналы sin(ω1•ϕэл) и cos(ω1•t-ϕэл), два выхода которого соединены соответственно с третьим и четвертым входами второго преобразователя координат, а третий и четвертый входы - с соответствующими выходами формирователя гармонических функций частоты скольжения, последовательно соединенные выпрямитель, подключенный входами к статорным обмоткам асинхронизированного синхронного генератора и аккумуляторная батарея, питающая преобразователь частоты, а также второй, третий и четвертый блоки умножения, первые входы которых подключены к выходу усилителя, причем третий и четвертый входы пятого преобразователя координат соединены с соответствующими выходами задающего генератора, второй вход перового блока умножения соединен с выходом третьего интегратора и вторым входом третьего сумматора, второй вход второго блока умножения соединен с выходом второго интегратора и третьим входом пятого сумматора, а выход - с четвертым входом второго сумматора, второй вход третьего блока умножения соединен с выходом пятого сумматора, а выход - с четвертым входом четвертого сумматора, второй вход четвертого блока умножения соединен с выходом третьего сумматора, а выход - с пятым входом второго сумматора.
| Устройство для управления асинхронизированным синхронным генератором ветроэнергетической установки | 1986 |
|
SU1399885A1 |
| RU 94036292 А1, 27.07.1996 | |||
| Устройство для управления бесконтактной асинхронизированной синхронной машиной | 1989 |
|
SU1721787A1 |
| СПОСОБ УПРАВЛЕНИЯ РАБОТОЙ ДВИГАТЕЛЯ ВНУТРЕННЕГО СГОРАНИЯ | 2001 |
|
RU2266417C2 |
