Изобретение относится к медицинской ультразвуковой диагностической аппаратуре, более конкретно, к специализированным ультразвуковым томографическим устройствам, предназначенным для исследования и ранней диагностики заболеваний грудной железы.
Известно ультразвуковое диагностическое устройство с трехмерной визуализацией (США N 5396890, опубл. 30.09.93, A 61 B 8/00), содержащее ультразвуковой датчик, одноканальный приемопередатчик, устройства электронного сканирования ультразвуковым пучком датчика, устройство механического перемещения датчика с системой определения его текущих координат, конвертор, блок памяти, процессор и дисплей для визуализации двумерных и трехмерных изображений. Известное устройство имеет несколько существенных недостатков, основными из которых являются: большие временные затраты на построение трехмерных изображений, определяемые длительностью вычислительных операций по определению текущих координат датчика и значительным разбросом разрешающей способности устройства по пространственным координатам во всей области обзора.
Последний недостаток присущ и акустическому компьютерному маммографу (США N 5433202, опубл. 18.07.95, A 61 B 8/00), выбранному в качестве прототипа.
Известный акустический компьютерный маммограф содержит ультразвуковой датчик, в состав которого введены шаговые двигатели с редуктором, на осях которых жестко закреплены два передающих и два приемных пьезопреобразовательных модуля, а также имеются последовательно соединенные малошумящий усилитель, аналого-цифровой преобразователь, буферное оперативное запоминающее устройство (БОЗУ), вычислитель, процессор обработки и хранения данных, монитор, а также блок управления шаговым двигателем, выход которого подключен ко входу управления шаговым двигателем, тактовый генератор и программный контроллер, при этом первый, второй, третий и четвертый выходы программного контроллера подключены, соответственно, ко вторым входам БОЗУ, вычислителя, процессора и монитора. Пьезопреобразовательный модуль маммографа состоит из двух передающих и двух приемных пьезоэлементов, каждый из которых расположен на одной из сторон контура синтезированной апертуры, имеющего форму квадрата, причем передающий и приемный пьезоэлементы принадлежат смежным сторонам контура.
Принцип построения известного акустического маммографа обусловливает присутствие упомянутого недостатка.
Предлагаемым изобретением решается задача получения трехмерного ультразвукового изображения грудной железы с высокой разрешающей способностью, равномерной во всей области обзора, причем результат достигается за счет использования дополнительной акустической фокусировки, применения в качестве пьезопреобразовательного модуля линейной решетки, состоящей из N приемопередающих пьезоэлементов, обработки отраженных зондирующих сигналов путем синтезирования апертуры, а также интерактивных средств управления параметрами синтеза изображения.
Для достижения этого технического результата в предлагаемый акустический компьютерный маммограф, содержащий ультразвуковой датчик, состоящий из шагового двигателя с редуктором, на оси которого жестко закреплен пьезопреобразовательный модуль, последовательно соединенные малошумящий усилитель, аналого-цифровой преобразователь (АЦП), БОЗУ, вычислитель, процессор обработки и хранения данных и монитор, а также блок управления шаговым двигателем, выход которого подключен ко входу управления шаговым двигателем, тактовый генератор и программный контроллер, при этом первый, второй, третий и четвертый выходы программного контроллера подключены, соответственно, ко вторым входам буферного оперативного запоминающего устройства, вычислителя, процессора и монитора, дополнительно введены блок формирования зондирующего сигнала и сигналов управления (БФЗССУ), первый вход которого соединен с выходом тактового генератора, второй вход подключен к пятому выходу программного контроллера, а сигнальный выход - ко входу одноканального переключателя "прием-передача", соединенного с М/2-отводной линией задержки двусторонней линией связи, циклический коммутатор, подключенный двусторонней М/2-канальной линией связи к М/2-отводной линии задержки и М-канальной двусторонней линии связи к второму М-канальному переключателю "прием-передача", соединенному М-канальными линиями связи, через параллельно установленные М-канальный усилитель мощности и М-канальный малошумящий усилитель, с первым М-канальным переключателем "прием-передача", при этом М-канальный усилитель мощности подключен к выходу, а М-канальный малошумящий усилитель - ко входу второго М-канального переключателя "прием-передача", и они же, соответственно, - ко входу и выходу первого М-канального переключателя "прием-передача", соединенного двусторонней M-канальной линией связи с мультиплексором, подключенному к пьезопреобразовательному модулю двусторонней N-канальной линией связи, при этом сигнальный выход блока формирования зондирующего сигнала и сигналов управления подключен ко входу одноканального переключателя "прием-передача", выход которого соединен с входом малошумящего усилителя; первый, второй и третий выходы управления БФЗССУ подключены, соответственно, к управляющим входам блока управления шаговым двигателем, мультиплексора и циклического коммутатора, а четвертый выход управления БФЗССУ подключен параллельно к управляющим входам одноканального, первого и второго М-канальных переключателей "прием-передача", а также имеющий интерактивную связь с монитором, интерфейс пользователя, электрический выход которого через блок управления параметрами синтеза совместно со вторым выходом программного контроллера (ПК) подключен ко второму входу вычислителя, и акустическая линза с резким фокусом на фиксированной глубине, жестко закрепленная на рабочей поверхности пьезопреобразовательного модуля (ППМ), выполненного в виде линейной решетки, состоящей из N-приемопередающих пьезоэлементов, причем N ≥ 32.
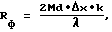
Глубину расположения фокуса ультразвукового датчика Rф можно определить по соотношению:
где d - шаг решетки, мм;
Δ - пространственное разрешение, мм;
k - поправочный дифракционный коэффициент;
λ - длина волны зондирующего излучения, мм.
Кроме того, блок формирования зондирующих сигналов и сигналов управления содержит последовательно соединенные модуль преобразования формата данных и управления, синтезатор, цифроаналоговый преобразователь и фильтр нижних частот, выход которого является сигнальным выходом блока формирования зондирующего сигнала и сигналов управления, а также блок формирования команд управления, подключенный ко второму выходу модуля преобразования формата данных и управления. Первый вход модуля преобразования формата данных и управления является вторым входом блока формирования зондирующего сигнала и сигналов управления, вторые входы модуля преобразования формата данных и управления, синтезатора и цифроаналогового преобразователя (ЦАП) объединены и являются первым входом блока формирования зондирующего сигнала и сигналов управления, а четыре выхода блока формирования команд управления являются, соответственно, первым, вторым, третьим и четвертым выходами управления блока формирования зондирующего сигнала и сигналов управления.
Дополнительно введенные блоки и узлы реализуют переменное количество когерентно суммируемых отраженных импульсов в зависимости от глубины зондирования с учетом реальных разбросов скорости распространения акустических волн в исследуемой среде (грудной железе), что обеспечивает равномерное и высокое пространственное разрешение во всей зоне обзора.
На фиг. 1 показана общая структурная схема маммографа.
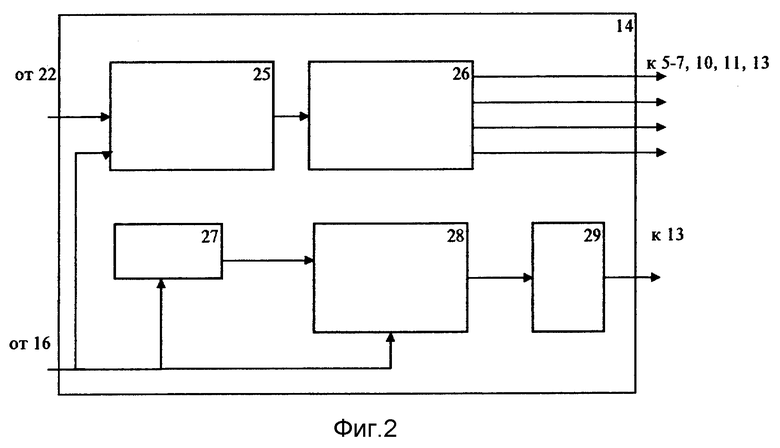
На фиг. 2 представлена структурная схема блока формирования зондирующих сигналов и сигналов управления.
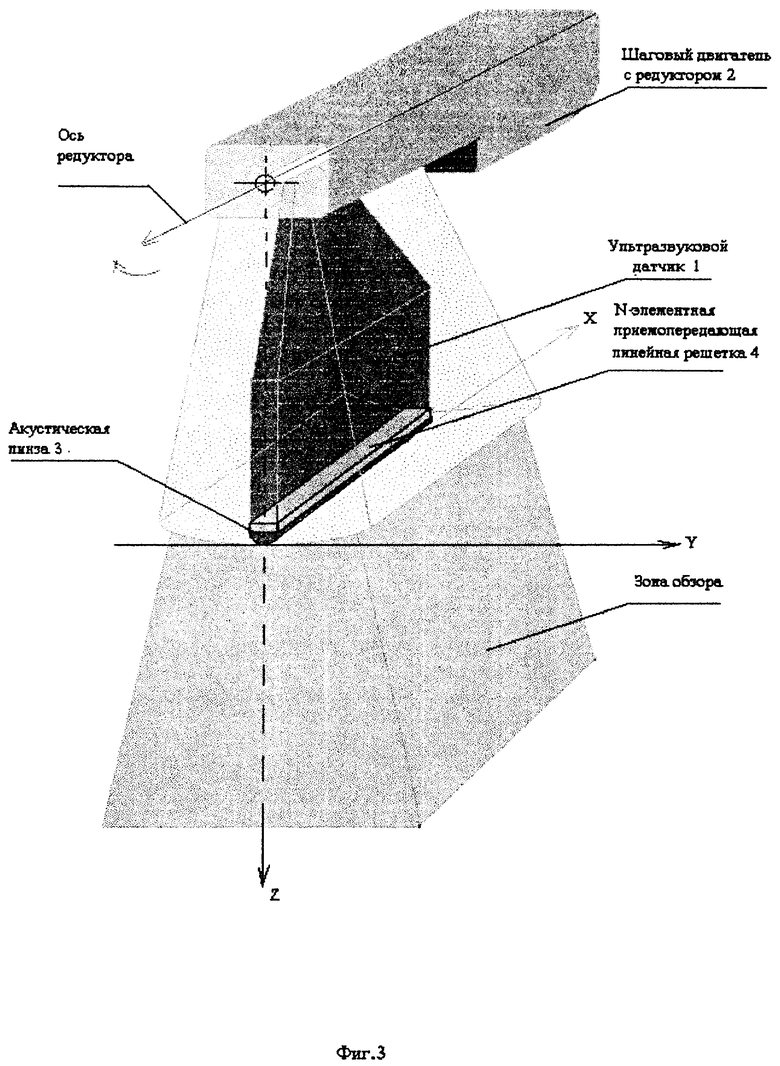
На фиг. 3 иллюстрируется принцип электронномеханического сканирования ультразвукового пучка.
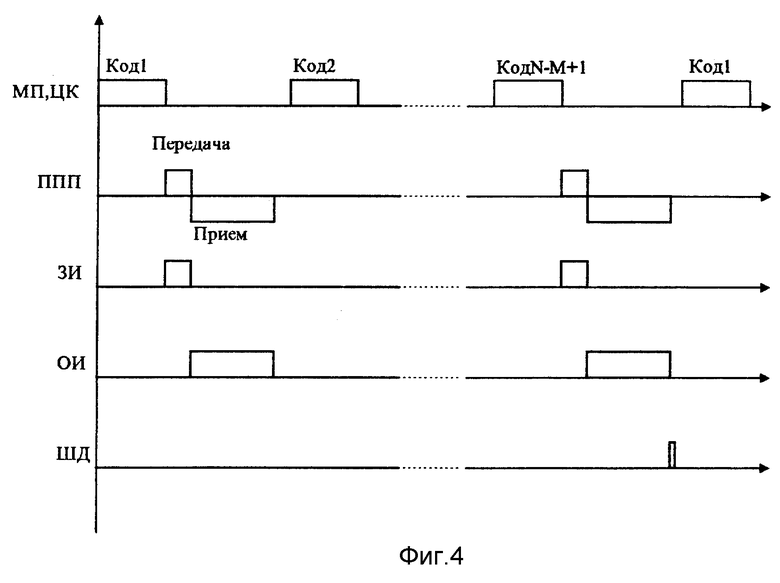
На фиг. 4 иллюстрируется принцип коммутации приемопередающей части маммографа.
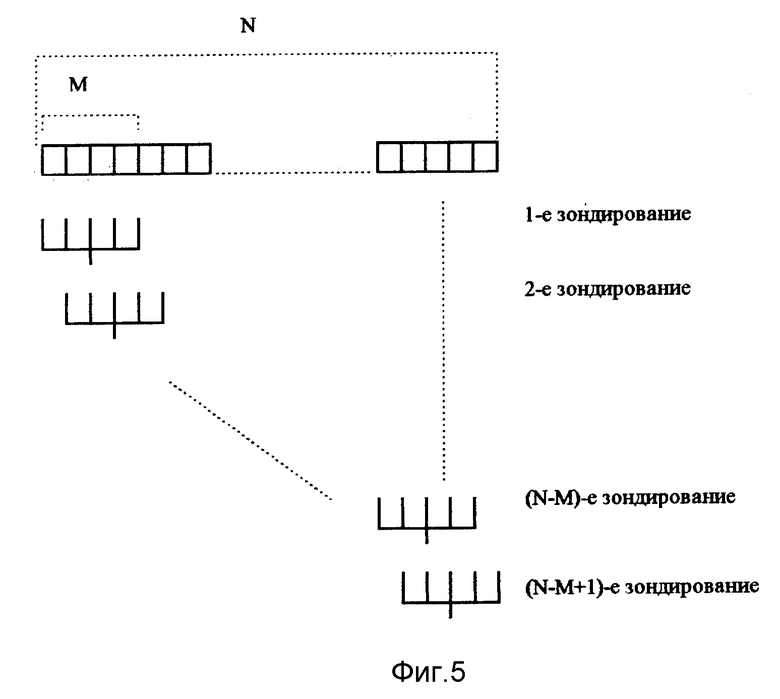
На фиг. 5 иллюстрируется принцип переключения активной области N-элементной приемопередающей линейной решетки.
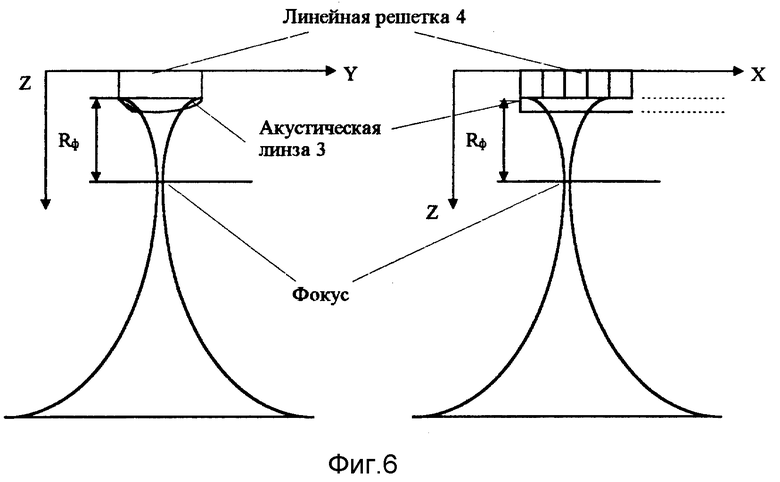
На фиг.6 показана пространственная структура ультразвукового пучка.
Акустический компьютерный маммограф содержит ультра звуковой датчик (УЗД) 1 (фиг. 1), включающий шаговый двигатель 2 с редуктором, пьезопреобразовательный модуль 4, жестко закрепленный на оси редуктора и акустическую линзу 3, жестко установленную на рабочей поверхности ППМ. ППМ подключен N-канальной двусторонней линией связи к мультиплексеру 6, блок формирования зондирующего сигнала и сигналов управления (БФЗССУ) 14 сигнальным выходом соединен со входом одноканального переключателя "прием-передача" 13, а управляющими входами подключен к блоку управления шаговым двигателем 5, мультиплексеру 6, первому М-канальному переключателю "прием-передача" 7, второму М-канальному переключателю "прием-передача" 10 и циклическому коммутатору 11. Между первым М-канальным переключателем 7 и вторым - 10, параллельно включены М-канальными линиями связи М-канальный усилитель мощности 8 и М-канальный малошумящий усилитель 9. При этом второй М-канальный переключатель 10 соединен выходом - с усилителем мощности 8, и входом - с малошумящим усилителем 9, а первый М-канальный переключатель 7 - входом соединен с усилителем мощности 8, и выходом - с малошумящим усилителем 9. Между циклическим коммутатором 11 и одноканальным переключателем 13 включена двусторонней линией связи М/2-отводная линия задержки 12. К выходу одноканального переключателя 13 подсоединена последовательно соединенная цепь, состоящая из малошумящего усилителя 15, АЦП 17, БОЗУ 18, вычислительного устройства 19, процессора 20 обработки и хранения данных и монитора 21. Программный контроллер 22 первым, вторым, третьим и четвертым выходами подключен, соответственно, ко вторым входам БОЗУ 18, вычислителя 19, процессора 20 и монитора 21, пятым выходом - к первому входу БФЗССУ 14. Кроме того, второй выход ПК 22 объединен с выходом блока управления параметрами синтеза 23 и, таким образом, подключен ко входу вычислителя 19. Интерфейс пользователя 24 подключен к блоку 23 и осуществляет интерактивную связь с монитором 21. Выход тактового генератора 16 подключен к первому входу БФЗССУ 14.
БФЗССУ 14 содержит предпочтительно последовательно соединенные (фиг. 2) модуль преобразования формата данных и управления 25, синтезатор 27, ЦАП 28 и фильтр нижних частот 29, выход которого является сигнальным выходом БФЗССУ. Блок формирования команд управления 26 подключен ко второму выходу модуля 25, его первый вход является вторым входом блока 22, вторые входы модуля 22, синтезатора 27 и ЦАП 28 объединены и являются первым входом блока 14. Кроме того, четыре выхода блока 26 являются, соответственно, первым, вторым, третьим и четвертым выходами блока 14.
Акустическая линза 3 имеет резкий фокус на фиксированной глубине. Пьезопреобразовательный модуль 4 является линейной решеткой (фиг. 3, 6), состоящей из N приемопередающих пьезоэлементов, где N ≥ 32.
Работа акустического компьютерного маммографа осуществляется следующим образом.
Обзор визируемой зоны производится путем электронно-механического сканирования (фиг. 3). Вдоль линейной решетки пьезопреобразователей обзор пространства производится посредством последовательного переключения активных пьезоэлементов, а в поперечном направлении - механическим перемещением решетки, производящимся после окончания цикла электронного сканирования.
Перед началом съемки ультразвуковой датчик (УЗД) 1 устанавливается врачом-оператором в необходимую зону обзора объекта исследования. При этом линейная решетка УЗД, состоящая из N приемопередающих пьезоэлементов, программным образом установлена на границе рабочего сектора механического сканирования. Зондирующий сигнал формируется блоком формирования зондирующего сигнала и сигналов управления (БФЗССУ) 14. Цифровые отсчеты сигнала и коды команд управления из программного контроллера 22 загружаются в узел преобразования формата данных и управления 25 (фиг.2). Далее, с временным интервалом, определяемым тактовым генератором 16, отсчеты зондирующего сигнала из синтезатора 26 поступают на ЦАП 27, и через фильтр нижних частот 29, обеспечивающий сглаживание формы импульса, на переключатель "прием-передача" (ПП) 13. При этом команды управления формируются блоком 28, входящим в состав БФЗССУ 14. Зондирующий сигнал с выхода БФЗССУ 14 поступает на М/2-отводную линию задержки (ЛЗ) 12. Полученная последовательность задержанных импульсов по М/2-канальной линии связи передается на циклический коммутатор (ЦК) 11, который путем размножения импульсов осуществляет формирование М-канального сигнала, который через М-канальные переключатели ПП 10, 7 и усилитель мощности (УМ) 8 подается на мультиплексер (МП) 6, осуществляющий распределение импульсов возбуждения по М каналам линейной решетки, состоящей из N приемопередающих пьезоэлементов, в соответствии с командами управления, сформированными БФЗССУ. После излучения зондирующего импульса (ЗИ) прием отраженного акустического сигнала (ОИ) производится теми же М каналами решетки. При этом переключатели ПП 7, 10, 13 по команде из БФЗССУ 14 устанавливаются в положение "прием". Принципы коммутации приемопередающей аппаратуры иллюстрируются фиг.4.
Принятый сигнал после усиления в М-канальном малошумящем усилителе (МШУ) 9 через ЦК 11 поступает на ЛЗ 12, на выходе которой формируется сигнал, полученный со всей глубины зоны обзора. После прохождения через МШУ 15 и АЦП 17 полученная цифровая информация записывается в БОЗУ 18. Таким способом формируется информация для одного положения области активных элементов на апертуре решетки. В следующем цикле приема-передачи активная область (после выдачи соответствующих команд управления на мультиплексер 6 и циклический коммутатор 11) сдвигается вдоль решетки на один элемент и вышеописанная процедура повторяется (N-M) раз. Принцип переключения активной области линейной решетки в процессе электронного сканирования (вдоль решетки) поясняется фиг. 5. Размер зоны обзора вдоль решетки определяется количеством пьезоэлементов N. Для целей наблюдения грудной железы достаточно N≥32.
После окончания цикла электронного сканирования из БФЗССУ 14 на блок управления шаговым двигателем (ШД) по ступает команда, формируемая блоком формирования команд управления 28, входящим в БФЗССУ 14, по которой производится перемещение линейной решетки в следующее положение, и, далее, процедура электронного сканирования повторяется.
Информация, полученная в полном цикле двумерного электронно-механического сканирования из БОЗУ 18, поступает на вычислительное устройство (ВУ) 19, где производится первый этап обработки принятого сигнала, включающий в себя корреляционную обработку отсчетов сигнала по глубине (вдоль оси OZ) и когерентное суммирование отсчетов сигнала по оси OY. Обработанный таким образом массив информации поступает из ВУ 19 в процессор обработки и хранения данных 20, в котором производится второй этап обработки, содержащий окончательный синтез трехмерного изображения путем когерентного суммирования отсчетов первичного изображения вдоль оси y, его визуализация, и вывод на монитор 21.
Разрешающая способность полученного трехмерного изображения по глубине определяется длительностью опорной функции коррелятора τи, а в поперечной плоскости - количеством когерентно суммируемых отсчетов сигнала (объемом синтеза Nc). При этом необходимое пространственное разрешение в поперечной плоскости достигается путем перемещения фокусной точки акустического поля в процессе электронно-механического сканирования. Формирование фокусной точки в плоскости ZOX (фиг. 6) обеспечивается временной расстановкой импульсов возбуждения активной области линейной решетки, а в плоскости ZOY - с помощью акустической линзы, размещаемой на апертуре решетки. Глубина расположения фокуса Rф УЗД 1 определяется следующим образом:
где d - шаг решетки, мм;
Δ - пространственное разрешение, мм;
k - поправочный дифракционный коэффициент;
λ - длина волны зондирующего излучения, мм.
Размеры элемента разрешения изображения по осям ОХ, OY и OZ ( Δx, Δy, Δz соответственно) равны:
где с - скорость распространения акустических волн, м/сек;
f - несущая частота ультразвуковых колебаний, Гц.
Как видно из (2), согласованным выбором τи и Nс можно обеспечить равномерность разрешения по всем пространственным направлениям в каждой точке зоны обзора, причем численное значение размера элемента разрешения определяется скоростью распространения ультразвуковой волны в среде с. В реальных условиях наблюдения неоднородной среды, каковой являются участки грудной железы, скорость распространения зависит от пространственных координат, что естественным образом приводит к аналогичной зависимости разрешающей способности изображения. Компенсация этого эффекта достигается соответствующим изменением длительности опорной функции коррелятора и объема синтеза, что реализуется введением значения усредненной скорости распространения в параметры алгоритмов синтеза изображения, и задается либо программным контроллером 22, либо (в интерактивном режиме) врачом-оператором через интерфейс пользователя 24 и блок управления параметрами синтеза 23. Это позволяет получить равномерное пространственное разрешение изображения в любой области зоны обзора даже в случае неоднородности скорости распространения волн в среде.
Для обеспечения оптимальной наблюдаемости грудной железы параметры аппаратуры должны иметь следующие численные значения:
Δx = Δy = Δz = 0,5 мм
М = 16
d = 0.5 мм
k = 0.77
Rф = 20 мм
λ = 0.308 мм
Конкретная реализация заявляемого устройства осуществляется частично на основе стандартных покупных приборов, узлов и блоков. Так, блоки 5-13 фиг.1 выполняются на стандартной элементной базе, блоки 20 - 22 являются принадлежностью любого персонального компьютера или рабочей станции и имеют все указанные на фиг.1 сигнальные и управляющие входы и выходы. Блоки 14-19 могут быть построены на базе сигнальных процессоров TMS320C40.
Таким образом, из описания работы ультразвукового маммографа с трехмерной визуализацией следует, что введение дополнительных блоков, обеспечивающих формирование фокусированного ультразвукового пучка, его сканирование в зоне обзора, проведение синтезирования изображения с переменным объемом синтеза в интерактивном режиме, позволяет обеспечить равномерную разрешающую способность изображения во всей зоне обзора.
| название | год | авторы | номер документа |
|---|---|---|---|
| АКУСТИЧЕСКИЙ МАММОГРАФ | 2004 |
|
RU2286094C2 |
| УСТРОЙСТВО ИНДИКАЦИИ ОПАСНОСТИ СТОЛКНОВЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА | 1997 |
|
RU2131622C1 |
| УЛЬТРАЗВУКОВОЙ ДИАГНОСТИЧЕСКИЙ КОМПЛЕКС ДЛЯ ФОРМИРОВАНИЯ И ВИЗУАЛИЗАЦИИ ТРЕХМЕРНЫХ ИЗОБРАЖЕНИЙ | 1997 |
|
RU2125836C1 |
| УЛЬТРАЗВУКОВОЕ ДИАГНОСТИЧЕСКОЕ УСТРОЙСТВО | 2002 |
|
RU2221494C2 |
| МНОГОКАНАЛЬНЫЙ ПРИЕМОИНДИКАТОР СПУТНИКОВЫХ РАДИОНАВИГАЦИОННЫХ СИСТЕМ | 1994 |
|
RU2079148C1 |
| ФАЗОМЕТР СИГНАЛОВ ВЫСОКОЙ ИЛИ СВЕРХВЫСОКОЙ ЧАСТОТЫ | 1995 |
|
RU2101715C1 |
| Приемопередающий модуль активной фазированной антенной решетки | 2017 |
|
RU2657336C1 |
| СИСТЕМА ОПЕРАТИВНОГО РАДИОЛОКАЦИОННОГО ЗОНДИРОВАНИЯ ПОВЕРХНОСТИ ЗЕМЛИ | 1998 |
|
RU2125277C1 |
| УСТРОЙСТВО ДЛЯ РЕГУЛИРОВАНИЯ ТЕМПЕРАТУРЫ | 1998 |
|
RU2160920C2 |
| НАВИГАЦИОННАЯ ГИДРОАКУСТИЧЕСКАЯ СТАНЦИЯ ОСВЕЩЕНИЯ БЛИЖНЕЙ ОБСТАНОВКИ | 2001 |
|
RU2225991C2 |
Изобретение используется в медицинской ультразвуковой диагностической аппаратуре, предназначенной для исследования и ранней диагностики заболеваний грудной железы. Устройство содержит ультразвуковой датчик, включающий шаговый двигатель с редуктором, на оси которого закреплен пьезопреобразовательный модуль с акустической линзой. Маммограф включает также малошумящий усилитель, АЦП, БОЗУ, вычислитель, процессор и монитор, а также блок управления шаговым двигателем, тактовый генератор и программный контроллер. Дополнительно введены блок формирования зондирующего сигнала и сигналов управления, М/2-отводная линия задержки, циклический коммутатор, два М-канальных переключателя "прием-передача", мультиплексор, М-канальный усилитель мощности, М-канальный малошумящий усилитель, а также имеющий интерактивную связь с монитором интерфейс пользователя, блок управления параметрами синтеза. Изобретение позволяет получить трехмерное ультразвуковое изображение грудной железы с высокой разрешающей способностью, равномерной во всей области обзора. 3 з.п. ф-лы, 6 ил.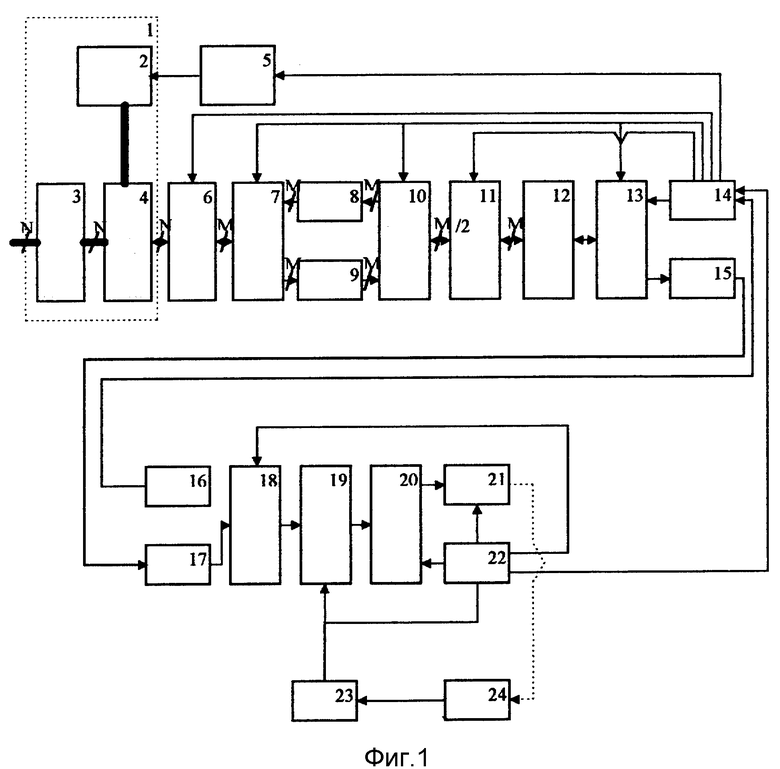
Акустической компьютерный маммограф с трехмерной визуализацией, содержащий ультразвуковой датчик, состоящий из шагового двигателя с редуктором, на оси которого жестко закреплен пьезопреобразовательнный модуль, последовательно соединенные малошумящий усилитель, амплитудно-цифровой преобразователь, буферное оперативное запоминающее устройство, вычислитель, про- цессор обработки и хранения данных и монитор, а также блок управления шаговым двигателем, выход которого подключен к входу управления шагового двигателя, тактовый генератор и программный контроллер, при этом первый, второй, третий и четвертый выходы программного контроллера подключены соответственно ко вторым входам буферного оперативного запоминающего устройства, вычислителя, процессора и монитора, отличающийся тем, что дополнительно введены блок формирования зондирующего сигнала и сигналов управления, первый вход которого соединен с выходом тактового генератора, второй вход подключен к пятому выходу программного контроллера, а сигнальный выход - к входу одноканального переключателя "прием-передача", соединенного с М/2-отводной линией задержки двусторонней линией связи, циклический коммутатор, подключенный двусторонней М/2-канальной линией связи к М/2-отводной линии задержки и М-канальной двусторонней линией связи к второму М-канальному переключателю "прием-передача", соединенному М-канальными линиями связи, через параллельно установленные М-канальный усилитель мощности и М-канальный малошумящий усилитель, с первым М-канальным переключателем "прием-передача", при этом М-канальный усилитель мощности подключен к выходу, а М-канальный малошумящий усилитель - к входу второго М-канального переключателя "прием-передача" и они же соответственно к входу и выходу первого М-канального переключателя "прием-передача", соединенного двусторонней М-канальной линией связи с мультиплексером, подключенным к пьезопреобразовательному модулю двусторонней N-канальной линией связи, выход одноканального переключателя "прием-передача" соединен с входом малошумящего усилителя, первый, второй и третий выходы управления блока формирования зондирующего сигнала и сигналов управления подключены соответственно к управляющим входам блока управления шаговым двигателем, мультиплексера и циклического коммутатора, а четвертый выход управления блока формирования зондирующего сигнала и сигналов управления подключен параллельно к управляющим входам одноканального, первого и второго М-канальных переключателей "прием-передача", а также имеющий интерактивную связь с монитором интерфейс пользователя, электрический выход которого через блок управления параметрами синтеза совместно со вторым выходом программного контроллера подключен ко второму входу вычислителя, и акустическая линза, жестко закрепленная на рабочей поверхности пьезопреобразовательного модуля, выполненного при этом в виде линейной решетки, состоящей из N приемопередающих пьезоэлементов, где N≥32.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| US 5433202, 1995 | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| US 5396890, 1993 | |||
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Ультразвуковой томограф | 1984 |
|
SU1284520A1 |

