Изобретение относится к медицинской ультразвуковой диагностической аппаратуре, более конкретно - к ультразвуковым средствам формирования и визуализации трехмерных изображений внутренних органов при неинвазивных медицинских обследованиях пациентов.
Известно трехмерное ультразвуковое диагностическое устройство (патент США N 5 396890 от 30.09.93, кл. A 61 B 8/00), которое в добавление к плоскостному (двухмерному) изображению, получаемому посредством стандартной сканирующей системы типа эхотомоскоп, обеспечивает построение и визуализацию трехмерных изображений путем формирования координированного пакета двухмерных изображений исследуемого объекта.
Это устройство содержит ультразвуковой датчик (УЗ-датчик), приемопередатчик ультразвуковых зондирующих сигналов, устройство сканирования ультразвуковым лучом датчика, трехмерное устройство позиционирования с декодером для определения текущего положения УЗ-датчика, перемещение которого осуществляет врач-оператор в интересующем его направлении, а также преобразователь (конвертор), блок памяти, процессор и дисплей для демонстрации как двухмерных, так и трехмерных изображений.
Известное устройство требует значительного времени для вычисления текущих координат УЗ-датчика при его перемещении в пространстве и, следовательно, общих временных затрат на построение трехмерных изображений. Этот недостаток аналога в основном определяется построением устройства позиционирования, которое представляет собой систему пространственно-распределенных датчиков, фиксирующих текущее положение ультразвукового датчика в заданной системе координат. Кроме того, перемещение УЗ-датчика рукой врача- оператора практически полностью исключает возможность точного повторения траектории перемещения при последующих обследованиях, что по существу исключает повторяемость конечных результатов обследования.
Фактически те же самые недостатки имеет ближайший аналог (патент EPS N 0452532 B1 от 20.04.90, кл. A 61 B 8/14, G 10 11/00), выбранный в качестве прототипа, так как характеризуется максимальной совокупностью признаков, сходной с совокупностью существенных признаков данного изобретения.
Ультразвуковое диагностическое устройство - прототип содержит ультразвуковой датчик, передатчик и приемник зондирующих сигналов, устройство управления сканированием, блок управления синхронизацией, АЦП, конвертор, процессор, блок памяти, устройство управления дисплеем и дисплей, а также устройство позиционирования, состоящее из держателя УЗ-датчика, неподвижного основания и двух штанг, соединенных между собой вращающимися сочленениями, в которых установлены угловые датчики, и определитель (вычислитель) положения УЗ-датчика в трехмерной системе координат, на который поступает информация с декодеров углового положения. Несмотря на то, что в прототипе УЗ-датчик жестко закреплен в держателе устройства позиционирования, свободное перемещение УЗ-датчика рукой врача-оператора приводит к необходимости определения (вычисления) текущих координат УЗ-датчика для формирования скоординированного пакета двухмерных изображений и практически исключается повторяемость результатов обследования так же, как и в упомянутом выше патенте США.
Предлагаемым изобретением решается задача сокращения времени построения трехмерных изображений и обеспечения повторяемости результатов обследования, причем результат достигается за счет программно-управляемого перемещения УЗ-датчика по заданной области исследования, а роль врача-оператора сводится к установке УЗ-датчика, закрепленного в держателе устройства позиционирования, в начальное фиксируемое положение.
Для достижения этого технического результата в ультразвуковой диагностический комплекс, состоящий из двухмерного ультразвукового диагностического аппарата (УДА), содержащего ультразвуковой датчик (УЗ-датчик), вход которого подключен к передатчику зондирующих сигналов, а выход подключен к приемнику отраженных сигналов, устройство управления сканированием, соединенное своим выходом со входами управления передатчика и приемника, АЦП, вход которого соединен с сигнальным выходом приемника, а выход подключен к последовательно соединенной цепи, состоящей из конвертора сигналов изображения, первого процессора, первого блока оперативной памяти, второй сигнальный выход которого подключен ко второму сигнальному входу первого процессора, устройства управления дисплеем и первого дисплея, блока управления синхронизацией, один из выходов которого подключен ко входам синхронизации устройства управления сканированием, а остальные соответственно к входам синхронизации АЦП, конвертора, процессора и устройства управления дисплеем, выход которого является TV-выходом УДА, а также устройства позиционирования, состоящего из неподвижного основания и двух штанг, соединенных между собой вращающимися сочленениями, и держателя, в котором установлен и жестко закреплен УЗ-датчик, введены последовательно соединенные преобразователь TV-сигналов, подключенный своим сигнальным входом к TV-выходу УДА, второй блок оперативной памяти, второй процессор, имеющий внешний вход управления, видеоконтроллер и второй дисплей, а также блок долговременной памяти, подключенный своими входом и выходом соответственно к второму входу и второму выходу второго процессора, блок управления шаговым двигателем (ШД), шаговый двигатель с редуктором и шаровой шарнир с подвесом, при этом третий выход второго процессора подключен ко второму входу преобразователя TV-сигналов, четвертый выход второго процессора соединен со вторым входом второго блока оперативной памяти, пятый и шестой выходы второго процессора подсоединены соответственно к первому и второму входам блока управления ШД, второй выход видеоконтроллера соединен с третьим входом второго процессора, первый выход блока управления ШД подключен к четвертому входу второго процессора, а остальные четыре - к соответствующим обмоткам шагового двигателя, причем шаговый двигатель с редуктором установлен и жестко закреплен на подвесе шарового шарнира, который установлен на конце второй штанги, на ось редуктора установлен держатель с УЗ-датчиком, а вращающиеся сочленения и шаровой шарнир снабжены фиксаторами.
При этом блок управления ШД содержит первый и второй буферные согласователи (БС), сигнальные входы которых являются соответственно первым и вторым входами блока управления ШД, последовательно соединенные генератор частот, вход которого подключен к выходу первого БС, схему управления ключами, счетчик импульсов, ОЗУ кодов управления ШД и блок ключей управления обмотками ШД, четыре выхода которого являются соответствующими выходами блока управления ШД, а также контроллер управления, вход которого соединен с выходом второго БС, а его три выхода подключены соответственно ко вторым входам схемы управления ключами, счетчика импульсов и ОЗУ кодов управления ШД, при этом второй выход счетчика импульсов подсоединен к третьему входу схемы управления ключами, второй выход которой подключен ко второму входу первого БС, а второй выход первого БС является первым выходом блока управления ШД.
Дополнительно введенные блоки и узлы обеспечивают программно-управляемое перемещение УЗ-датчика и формирование координированного пакета двухмерных изображений, необходимого для восстановления трехмерного массива по существу параллельно процессу визуализации двухмерных изображений на дисплее типового эхотомоскопа (двухмерного ультразвукового диагностического аппарата).
Предлагаемый ультразвуковой диагностический комплекс иллюстрируется чертежами, представленными на фиг. 1-5.
На фиг. 1 показана общая блок-схема УДК;
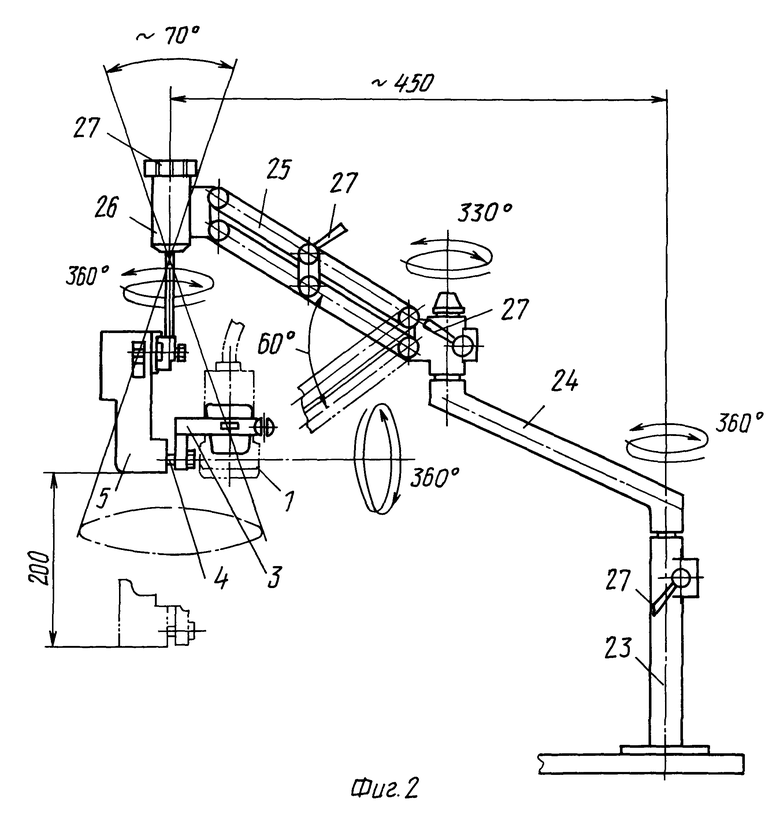
на фиг. 2 представлена структурная кинематическая схема устройства позиционирования;
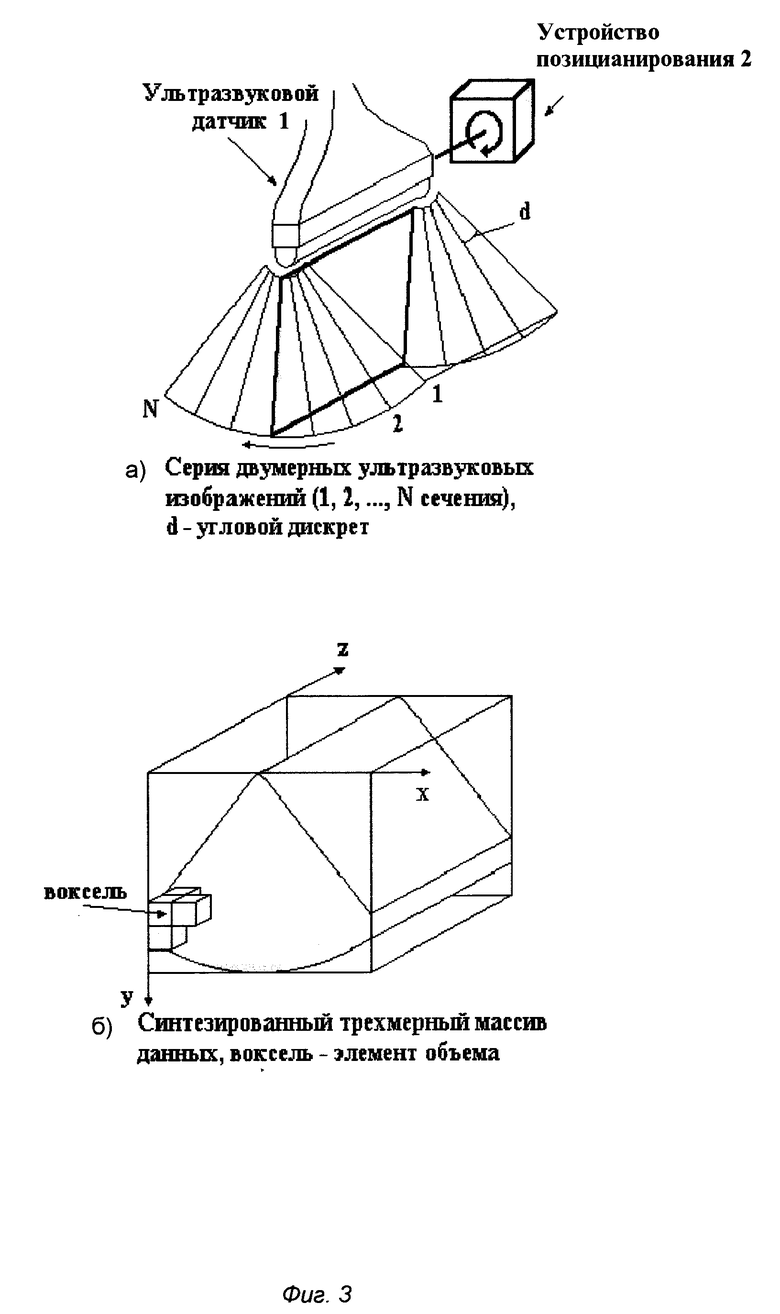
на фиг. 3 иллюстрируется принцип формирования трехмерного массива данных;
а) серия двухмерных ультразвуковых изображений,
б) синтезированный 3D-массив,
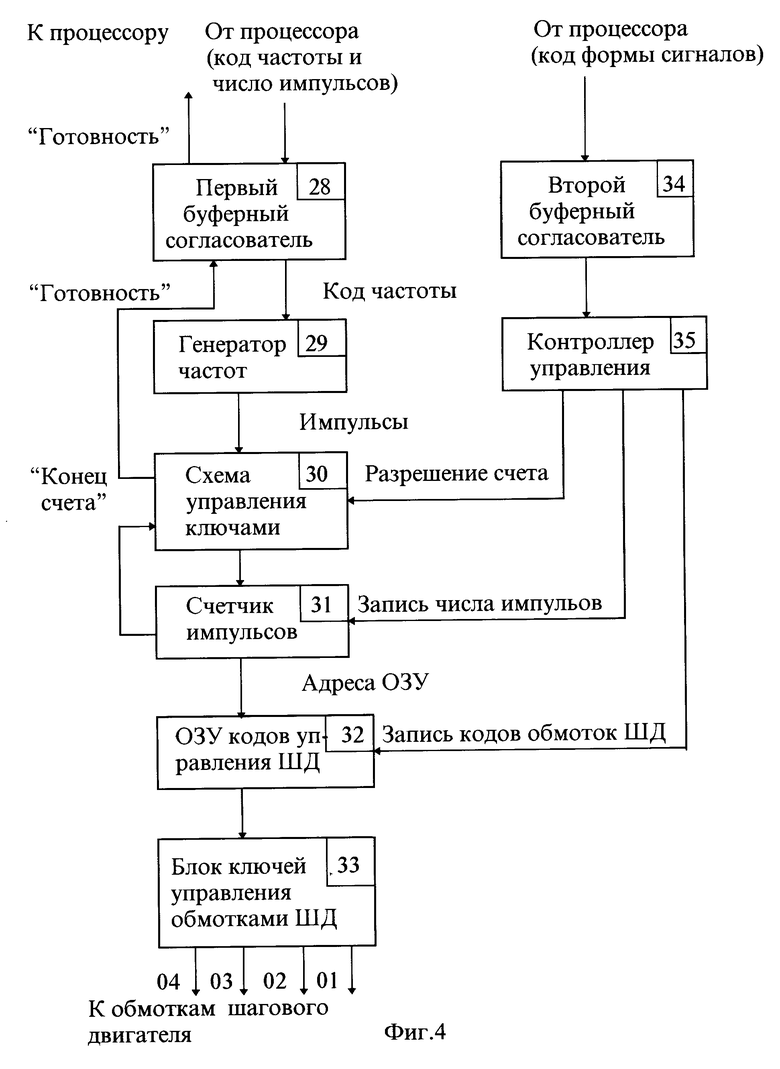
на фиг. 4 изображена блок-схема блока управления шаговым двигателем;
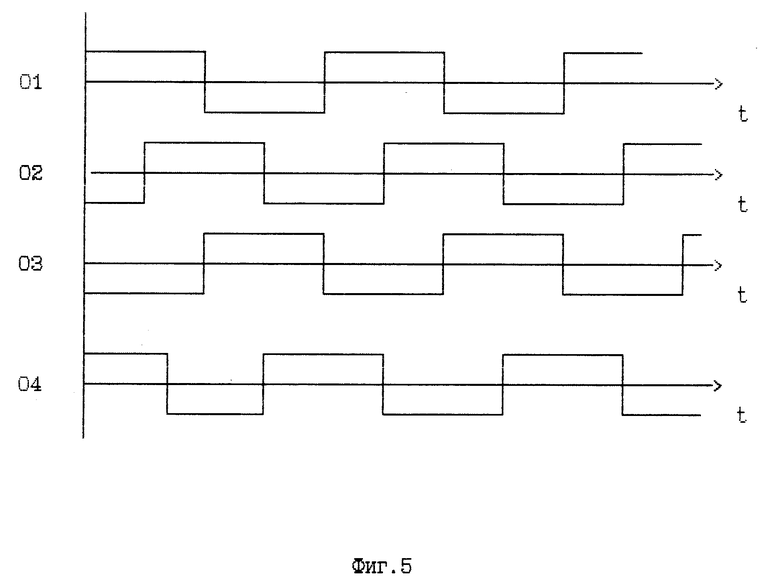
на фиг. 5 представлена временная диаграмма импульсов управления обмотками шагового двигателя;
На фиг. 1 УЗ-датчик 1 подключен к выходу передатчика 6 и входу приемника 7. Выход приемника соединен с входом АЦП 8, выход АЦП подключен к конвертору 9. Выход конвертора соединен с первым процессором 12. Первый процессор соединен с блоком управления синхронизацией 11 и первым блоком оперативной памяти 13, выход которого через устройство управления дисплеем 14 соединен с первым дисплеем 15. Блок управления синхронизацией соединен своими выходами с устройством управления сканированием 19, АЦП и устройством управления дисплеем 14. Выход устройства управления дисплеем, являющийся TV- выходом, подключен ко входу преобразователя TV-сигналов 16, выход которого подключен к последовательно соединенным второму блоку оперативной памяти 17, второму процессору 18, видеоконтроллеру 20 и второму дисплею 22. При этом второй процессор управляющими выходами соединен с преобразователем TV-сигналов, вторым блоком оперативной памяти, двумя выходами - с блоком управления ШД 19, а также другими входом и выходом соединен с блоком долговременной памяти 21. Блок управления шаговым двигателем одним своим выходом соединен с информационным входом процессора, а четырьмя другими - с обмотками ШД 5, на оси редуктора которого закреплен держатель 3 УЗ-датчика.
Блок управления ШД состоит из первого 28 и второго 34 буферных согласователей (БС). Входы БС подключены соответственно к выходам второго процессора. Внешний выход первого БС также подключен к соответствующему входу второго процессора, а внутренний выход - к последовательно соединенным генератору частот 29, схеме управления ключами 30, счетчику импульсов 31, ОЗУ кодов управления ШД 32, четыре выхода которого соединены с обмотками ШД. Выход второго буферного согласователя соединен с контроллером управления 35, один из выходов которого подключен к схеме управления ключами 30, второй - к счетчику импульсов 31 и третий - к ОЗУ кодов управления ШД. При этом второй выход счетчика импульсов 31 соединен со вторым входом схемы 30, а второй выход схемы 30 подключен к внутреннему входу первого буферного согласователя 28.
Работа ультразвукового диагностического комплекса (фиг. 1) осуществляется следующим образом. Зондирующий сигнал, сформированный от импульсов, заданных блоком 11 управления синхронизацией в соответствии с циклограммой, заложенной в устройстве 10 управления сканированием, излучается, а затем после отражения принимается ультразвуковым датчиком 1, усиливается в приемном устройстве 7 и преобразуется в АЦП 8 в цифровой сигнал. Далее этот сигнал через конвертор 9, производящий межстрочную интерполяцию, поступает в первый процессор 12 и после дополнительной обработки записывается в первый блок оперативной памяти 13 и далее в необходимом формате поступает в устройство управления дисплеем 14, откуда, совместно со служебной информацией, выдается на экран первого дисплея 15 в виде двухмерного ультразвукового изображения зондируемого органа. Дополнительная обработка в первом процессоре 12 производится через первый блок оперативной памяти 13, второй сигнальный вход которого подключен ко второму сигнальному входу первого процессора, что обеспечивает требуемое качество двухмерных изображений. Врач - оператор, держа в руке УЗ-датчик, проводит обычное обследование больного, используя наблюдаемое двухмерное изображение, находит интересующий его внутренний орган или его часть и определяет начальное и конечное положения УЗ-датчика 1 при съеме трехмерного изображения. Затем оператор устанавливает и закрепляет УЗ-датчик 1 в держателе 3 устройства позиционирования (фиг. 2).
Устройство позиционирования выполнено таким образом, что позволяет врачу-оператору беспрепятственно установить УЗ-датчик 1 в любое место заранее выбранной области обследования. Для этого врач-оператор освобождает все фиксаторы 27 и, манипулируя относительно неподвижного основания 23 штангами 24 и 25, соединенными между собой вращающимися сочленениями, а также шаровым шарниром 26 с подвесом, на котором жестко закреплен шаговый двигатель с редуктором 5, на ось 4 которого установлен и закреплен держатель 3 УЗ-датчика 1, устанавливает УЗ-датчик 1 в заранее выбранное начальное положение. После этого врач-оператор фиксирует штанги и шаровой шарнир с подвесом и подает внешнюю команду во второй процессор 18 на перемещение УЗ-датчика. По этой команде второй процессор 18 выдает в преобразователь TV-сигналов 16 команду управления для запуска регистрации TV-кадров и команду управления в блок управления шаговым двигателем 19, по которой в соответствии с ранее записанными от второго процессора 18 уставками (код частоты, число импульсов, коды длительности импульсов и величиной сдвигов между импульсами) разворачивается циклограмма запитки шагового двигателя 5, перемещающего УЗ-датчик по поверхности тела пациента. Из преобразователя TV-сигналов каждый полный кадр в цифровой форме записывается во второй блок оперативной памяти 17. К моменту окончания перемещения УЗ-датчика 1 во втором блоке памяти 17 записана вся серия ультразвуковых двухмерных изображений в соответствии о заданным числом импульсов (числом положений УЗ-датчика 1).
На экране второго дисплея 22 процесс регистрации серий отображается индикацией порядкового номера регистрируемого среза и перемещающимся маркером на линейке индикации положения УЗ-датчика. После регистрации срезов во втором процессоре осуществляется синтез трехмерного изображения, для чего из второго блока памяти 17 во второй процессор 18 последовательно переписываются рядом расположенные двухмерные срезы зарегистрированной серии, производятся межслойная интерполяция и перезапись обратно во второй блок памяти 17. К моменту окончания синтеза во втором блоке оперативной памяти 17 записан сформированный трехмерный массив - трехмерное ультразвуковое изображение. Фиг. 3 иллюстрирует принцип работы алгоритма синтеза на примере сканирования поверхности тела пациента линейным УЗ - датчиком. При этом двухмерные изображения зарегистрированной серии располагаются в пространстве в полярной системе координат в виде веера, расходящегося из оси вращения датчика (оси редуктора), и расположенные через дискретный угол d. Тогда линии пересечения изображений серии с плоскостями, перпендикулярными оси вращения датчика, образуют лучи, исходящие из центра вращения и также расположенные через углы d. Результирующие изображения в этих плоскостях строятся методом круговой интерполяции между лучами. Для синтеза трехмерного массива принято вексельное (voksel) представление данных. Вексель - это отсчет, занимаемый одной точкой в трехмерном массиве. Использование вексельной модели представления данных позволяет перейти от изображений в плоскостях к тонким, толщиной в один вексель, срезам и, рассматривая трехмерный массив как совокупность одновоксельных срезов, их просуммировать. Следует отметить, что вся серия зарегистрированных двухмерных срезов остается во втором блоке памяти 17 и может быть просмотрена на втором дисплее 22.
Поясним более подробно функционирование блока управления шаговым двигателем (фиг. 4). Блок состоит из первого буферного согласователя (БС) S8, второго БС 34, генератора частот 29, контроллера управления 35, схемы управления ключами 30, счетчика импульсов 31, оперативного запоминающего устройства 32 кодов управления шаговым двигателем (ШД), блока ключей управления обмотками ШД (33). Через первый БС 28 на генератор частот программно от второго процессора 18 перед регистрацией задается число импульсов, которые должны поступать на обмотки ШД, и частота их поступления на эти обмотки. Через второй буферный согласователь 34 и контроллер управления 35 в ОЗУ кодов управления 32 записываются длительность этих импульсов и сдвиг их относительно друг друга. В рассматриваемом случае задано: скважность импульсов равна 2, сдвиг между импульсами равен половине длительности импульса. Эти параметры выбраны для обеспечения на валу ШД 5 максимальной мощности. ШД 5 содержит четыре обмотки. На фиг. 5 представлена временная диаграмма импульсов, поступающих на эти обмотки из блока ключей 33 управления обмотками ШД. Запрограммированное число импульсов соответствует запрограммированному углу поворота датчика, частота поступления импульсов - скорость поворота оси редуктора ШД. Дискретность углового перемещения оси редуктора ШД (УЗ-датчика) при подаче одного импульса равна
Δ = δ/N,
где δ - шаг ШВ;
N - передаточное отношение редуктора.
Для программно задаваемой дискретности регистрации двухмерных УЗ изображений Δp число импульсов для поворота оси редуктора устройства позиционирования 2 на этот (Δp) угол равно отношению Δp к Δ. Это число записывается в счетчик импульсов 31 через контроллер управления 35. От генератора частот 29 на счетчик импульсов 31 по вычитающему входу поступают импульсы с программно заданной частотой (определяющей скорость вращения оси редуктора ШД). Как только заданное число импульсов будет просчитано, счетчик импульсов вырабатывает сигнал "конец счета" в схему управления ключами 30. Схема управления ключами 30 в ответ на него вырабатывает сигнал "Готовность", который передается через первый БС 28 во второй процессор 18.
Этот сигнал означает готовность к приему следующего TV-кадра. Второй процессор 18 посылает команду в преобразователь TV-сигналов 16 для регистрации ближайшего по времени TV-ультразвукового изображения, а также посылает в блок управления ШД 19 следующий дискрет перемещения. Импульсы запитки ШД распределяются на 4 выхода блока ключей управления 33 через соответствующую адресацию, записанную в ОЗУ 32 от контроллера управления 35. Регистрация продолжается до записи заданного количества УЗ-изображений. После того, как завершена регистрация и сформирован трехмерный массив данных, оператор, пользуясь соответствующим программным обеспечением, записанным в блок долговременной памяти 2I, задает режимы обработки этого массива и соответствующей его визуализации.
Таким образом, из описания работы ультразвукового диагностического комплекса следует, что введение дополнительных блоков, обеспечивающих программно-управляемое перемещение УЗ-датчика по заданной траектории, исключает длительные по времени и сложные вычислительные операции по определению текущих координат перемещаемого рукой врача-оператора УЗ-датчика, имеющих место в прототипе, и обеспечивает многократное повторение выбранной траектории перемещения УЗ-датчика, что в конечном итоге позволяет наблюдать динамику изменения структуры исследуемых органов пациентов на протяжении длительного времени в одинаковых условиях (ракурсах).
Конкретная реализация заявляемого устройства осуществляется в большей части на основе стандартных покупных приборов, узлов и блоков. Так, блоки 1,6 - 15 фиг. 1 составляют любой ультразвуковой эхотомоскоп, используемый в настоящее время для ультразвуковых диагностических исследований, например "Aloka-500"; преобразователь TV-сигналов 16 изготавливается фирмой "Видеоскан", блоки 17, 18, 2O, 21, 22 входят в состав любого персонального компьютера или рабочей станции и имеют все указанные на фиг. 1 сигнальные и управляющие входы и выходы. Блок управления шаговым двигателем состоит из широко распространенных электронных элементов и узлов; изготовление неподвижного основания 23, штанг 24, 25, шарового шарнира с подвесом 26, держателя 3 УЗ-датчика 7 осуществляется на обычных механических станках и не представляет каких-либо технических трудностей.
| название | год | авторы | номер документа |
|---|---|---|---|
| АКУСТИЧЕСКИЙ КОМПЬЮТЕРНЫЙ МАММОГРАФ С ТРЕХМЕРНОЙ ВИЗУАЛИЗАЦИЕЙ | 1998 |
|
RU2139679C1 |
| УСТРОЙСТВО ИНДИКАЦИИ ОПАСНОСТИ СТОЛКНОВЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА | 1997 |
|
RU2131622C1 |
| УЛЬТРАЗВУКОВОЙ ДИАГНОСТИЧЕСКИЙ КОМПЛЕКС ДЛЯ ДИАГНОСТИКИ ОПОРНО-ДВИГАТЕЛЬНОГО АППАРАТА ЧЕЛОВЕКА | 2003 |
|
RU2246261C1 |
| ФАЗОВЫЙ ПЕЛЕНГАТОР | 1998 |
|
RU2143707C1 |
| ФАЗОМЕТР СИГНАЛОВ ВЫСОКОЙ ИЛИ СВЕРХВЫСОКОЙ ЧАСТОТЫ | 1995 |
|
RU2101715C1 |
| СТАБИЛИЗИРОВАННЫЙ ИСТОЧНИК ПИТАНИЯ | 1988 |
|
RU2025765C1 |
| КОММУТАТОР ДЛЯ УПРАВЛЕНИЯ ШАГОВЫМ ДВИГАТЕЛЕМ | 1995 |
|
RU2103716C1 |
| УСИЛИТЕЛЬ СЧИТЫВАНИЯ ДЛЯ ЗАПОМИНАЮЩЕГО УСТРОЙСТВА | 1993 |
|
RU2060564C1 |
| Устройство встроенного саморемонта памяти с резервными элементами | 2017 |
|
RU2667786C1 |
| УСТРОЙСТВО ДЛЯ ОЦЕНКИ ХАРАКТЕРИСТИК ЗОНЫ НАЧАЛЬНОГО ПОИСКА СВЯЗНЫХ КОСМИЧЕСКИХ АППАРАТОВ | 2003 |
|
RU2242790C1 |
Комплекс используется в медицинской ультразвуковой диагностической аппаратуре, предназначенной для объемной визуализации внутренних органов человека. Ультразвуковой датчик эхотомоскопа жестко фиксируется на поверхности тела пациента, а при съеме изображений перемещается по одной координате. В устройство позиционирования введены шаговый двигатель с редуктором и шаровой шарнир с подвесом, фиксаторы подвижных частей, а в аппаратную часть введены блок управления шаговым двигателем, преобразователь ТV-сигналов эхотомоскопа, второй блок оперативной памяти, второй процессор, блок долговременной памяти, видеоконтроллер и второй дисплей. Управление перемещением УЗ-датчика осуществляется от введенного процессора через блок управления шаговым двигателем. Регистрация двухмерных изображений с ТV-выхода эхотомоскопа производится во введенном блоке оперативной памяти синхронно с перемещением УЗ-датчика. При взаимодействии процессора с блоком оперативной памяти формируется трехмерный массив, который визуализируется с помощью введенных видеоконтроллера и дисплея. Последующая обработка и различные представления массива осуществляются с помощью программ, записанных в блоке долговременной памяти. Использование комплекса позволяет сократить время формирования трехмерного изображения и повысить повторяемость при многократных исследованиях. 1 з.п.ф-лы, 5 ил.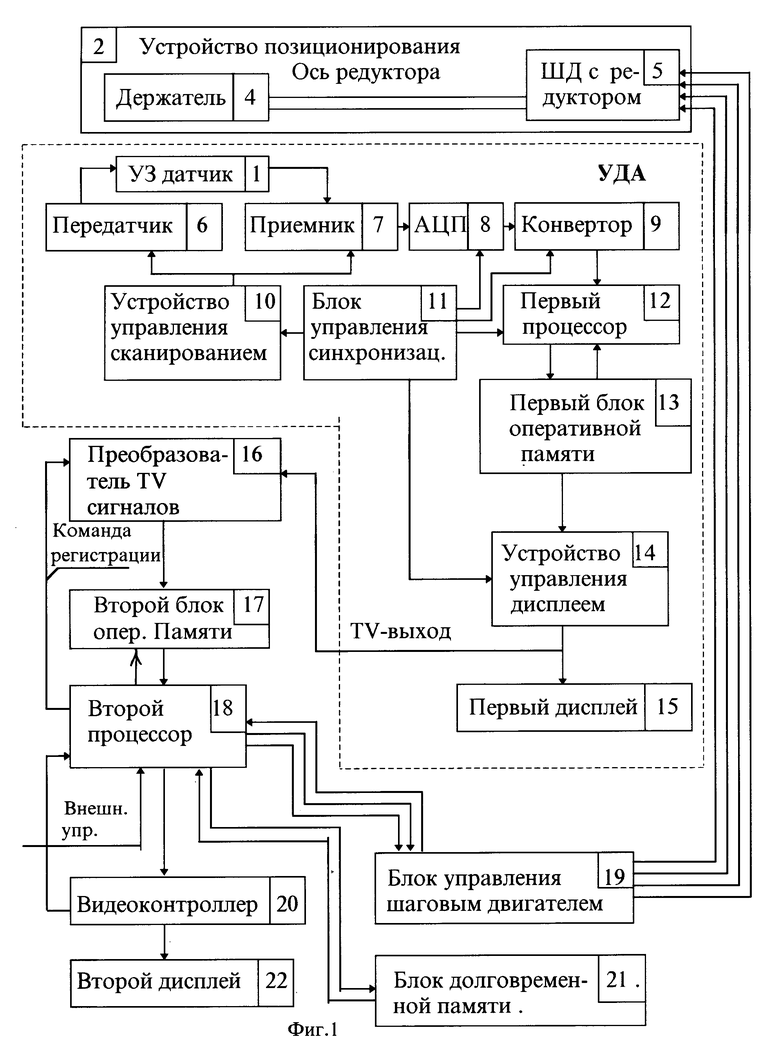
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| EP, 0452532, 1992 | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| US, 5396890, 1995 | |||
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| SU, 1284520, 1987. | |||

