Изобретение относится к радиолокации, более конкретно к автономным радиолокационным системам обеспечения безопасности полетов летательных аппаратов.
На большинстве самолетов имеется бортовой радиолокатор классического типа. Сканирующая по кругу или в секторе антенна, имеющая больший размер по ширине (в плоскости сканирования), чем по высоте, обеспечивает излучение зондирующих импульсов передатчика и прием отраженных сигналов приемником. Усиленные и продетектированные отраженные сигналы поступают на индикаторное устройство, развертка которого связана с положением антенны и задержкой времени отраженного сигнала относительно зондирующего. Наблюдая полученное на индикаторе радиолокационное изображение, можно получить определенную информацию о положении относительно самолета воздушных и наземных объектов, в том числе представляющих угрозу безопасности полета. Такие радиолокаторы описаны, например, в книге "Теоретические основы радиолокации" п/р Дулевича, "Советское радио", Москва, 1964 г.
Однако двухмерность изображения (азимут-дальность) не позволяет получить верную картину обстановки для обеспечения безопасности полетов, так как опасность того или иного объекта зависит еще и от его угла места. Поэтому при полете в пересеченной местности на небольшой высоте двухмерная информация становится бесполезной, а нередко даже опасной, вводящей экипаж самолета в заблуждение. Именно в такой ситуации происходит значительное число аварий и катастроф и обычно применяемый самолетный радиолокатор не способен изменить такое положение. Относительно воздушных объектов двухмерный радиолокатор не способен различать объекты, находящиеся на разной высоте, и поэтому возможны ложные тревоги.
Можно применить устройство, реализующее способ предупреждения столкновения летательного аппарата с землей (патент Франции N 93004769/28 от 06.04.93 класс МПК G 08 G 5/04). При этом в запоминающее устройство вводится база данных о рельефе земной поверхности. В полете на основе навигационных данных и параметров движения аппарата путем анализа базы данных определяется высота полета над поверхностью земли. Если высота полета меньше порогового значения, формируется сигнал тревоги.
Такое устройство может надежно работать только при хорошем знании горизонтальных координат текущего местоположения летательного аппарата, что вынуждает оборудовать летательный аппарат соответствующими навигационными приборами высокой точности и надежности, повышающими стоимость бортового оборудования. Очевидно также, что любой сбой в определении местоположения аппарата приведет к неправильному определению высоты над местностью, а это чревато катастрофой. Кроме того, применение такого устройства возможно только для тех участков местности, для которых созданы соответствующие базы данных. Скорее всего это районы крупных международных аэропортов. Необходимые данные по мелким аэропортам будут получены по-видимому нескоро.
Также известна радиолокационная система (патент США N 5132693 от 21.07.92 класс МПК G 01 S 13/89), основанная на применении слабонаправленной передающей антенны, горизонтально ориентированной приемной антенной решетки, блока приемных трактов, центрального Фурье-процессора и электронно-лучевого индикатора. На индикаторе в координатах: дальность-азимут отображается внешняя обстановка, позволяющая экипажу определить наличие опасных объектов. В этой системе решается задача раннего предупреждения столкновения самолетов с угрожающими воздушными объектами. Однако такая система, наиболее близкая к данному предложению, неспособна обеспечить предупреждение столкновения с землей, так как не обладает разрешением по углу места, как и классический двухмерный радиолокатор. При заходе на посадку, когда в зоне действия системы окажутся элементы местности, система будет постоянно давать тревогу и поэтому должна быть отключена. Кроме того, при полете на большой высоте система может давать ложные тревоги по отношению к объектам, находящимся на других эшелонах. В этом отношении система мало отличается от классического радиолокатора.
Предлагаемым изобретением решается задача повышения безопасности полетов путем выдачи экипажу информации о внешней обстановке и наличия в зоне ответственности угрожаемых столкновением объектов. Наличие у экипажа такой информации позволяет не только своевременно получить сигнал тревоги, но и выполнить маневр уклонения, что в итоге и повышает безопасность полетов. В основном опасность столкновения с элементами местности актуальна при полете на малой высоте, при заходе на посадку, при взлете и посадке. Столкновение с воздушными объектами возможно на любом этапе полета.
Решение технической задачи достигается за с чет формирования трехмерного (азимут-угол места-дальность) радиолокационного изображения внешней обстановки и отображения его на мониторе в близком по отношению к реально воспринимаемому при визуальном наблюдении пилотом виде, а также отображением положения угрожаемого объекта на мониторе и подачей сигналов тревоги акустическими средствами, что повышает скорость и правильность принятия пилотом решения в обстановке, чреватой опасностью.
Для этого в устройство индикации опасности столкновения летательного аппарата, содержащее передающую антенну, подключенную к импульсному передатчику, связанному с первым выходом задающего генератора, приемную линейную антенную решетку, каждый элемент которой соединен со входом соответствующего приемника блока приемников, второй вход которого соединен со вторым выходом генератора, а выход каждого приемника подключен ко входу соответствующего аналого-цифрового преобразователя (АЦП) блока аналого-цифровых преобразователей, второй вход которого соединен с третьим выходом задающего генератора, а выходной сигнал каждого АЦП подключен к соответствующему входу Фурье-процессора, введен сканер, механически связанный с передающей антенной, вращаемой в ортогональной по отношению к оси приемной решетки плоскости, процессор трехмерного изображения, один вход которого подключен к выходу Фурье-процессора, а другой - к электрическому цифровому выходу сканера, сумматор, один из входов которого подключен к выходу процессора трехмерного изображения, процессор сегментации угрожаемых объектов, вход которого соединен с выходом процессора трехмерного изображения, а один из выходов соединен со вторым входом сумматора, сигнализатором тревоги, вход которого подключен ко второму выходу процессора сегментации угрожаемых объектов, цифровым монитором, вход которого соединен с выходом сумматора.
Признаки, отличающие предложенное устройство от наиболее близкого к нему, известного по патенту США N 5132693 - введение сканера, процессора трехмерного изображения, процессора сегментации угрожаемых объектов, сумматора, сигнализатора тревоги и цифрового монитора, а также установка приемной антенной решетки в вертикальной плоскости (при сканировании передающей антенны в горизонтальной плоскости), позволяют надежно выделить среди всех наблюдаемых устройством объектов только те, которые могут представлять реальную опасность. Другие объекты, наблюдаемые устройством, но не находящиеся в трехмерном секторе ответственности, не вызывают срабатываний тревожной сигнализации. Это обеспечивает исключение ложных тревог, а также дает экипажу информацию по формированию маневра уклонения. Изображение на мониторе близко к той привычной визуальной картине, которую пилот наблюдает при хорошей видимости. На нем правильно отображаются основные элементы местности, как не представляющие опасности, так и те, с которыми возможно столкновение. Именно все это позволяет пилоту выбрать наиболее безопасную траекторию расхождения с препятствием.
Геометрические соотношения при работе бортовых радиолокаторов показаны на фиг. 1. Структурная схема предлагаемого устройства изображена на фиг. 2, где обозначено:
1 - передающая антенна,
2 - импульсный передатчик,
3 - задающий генератор,
4 - приемная антенная решетка (4-1...4-n - антенные элементы),
5 - блок приемников (5-1...5-n - приемники),
6 - блок АЦП (6-1...6-n - АЦП),
7 - Фурье-процессор,
8 - сканер,
9 - процессор трехмерного изображения,
10 - сумматор,
11 - процессор сегментации угрожаемых объектов,
12 - сигнализатор тревоги,
13 - цифровой монитор.
Вход передающей антенны (1) подключен к выходу импульсного передатчика (2), вход которого соединен с первым выходом задающего генератора (3). Механически передающая антенна (1) связана со сканером (8), электрический выход которого соединен со входом процессора трехмерного изображения (9). Выход каждого элемента приемной антенной (4) решетки соединен со входом каждого приемника блока приемников (5), а выход каждого приемника блока приемников (5) соединен со входом каждого аналогово-цифрового преобразователя блока АЦП (6). Выходы каждого АЦП подключены ко входам Фурье-процессора (7), выход которого соединен со входом процессора трехмерного изображения (9). Второй вход каждого приемника блока приемников (5) соединен со вторым входом задающего генератора (3), третий вход которого подключен ко второму входу каждого АЦП блока АЦП (6). Выход процессора трехмерного изображения (9) соединен со входом процессора сегментации угрожаемых объектов (11) и одним из входом сумматора (10), другой вход которого подключен к выходу процессора сегментации угрожаемых объектов (11). К другому выходу процессора сегментации угрожаемых объектов (11) подключен вход сигнализатора тревоги (12). К выходу сумматора (10) подключен цифровой монитор (13).
Устройство работает следующим образом. Зондирующие сигналы импульсного передатчика (2) излучаются передающей антенной (1), высота раскрыва которой меньше его ширины. Антенна с таким раскрывом формирует веерный, косекансквадратный или другой подобной формы луч, широкий в вертикальной (угломестной) плоскости и узкий в горизонтальной (азимутальной) плоскости. Для обзора требуемого сектора антенна (1) установлена на сканере (8), осуществляющем секторное сканирование или круговой обзор в угломестной плоскости. Сигналы, отраженные от объектов, попавших в луч передающей антенны, принимаются элементами линейной приемной антенной решетки (4), ориентированной своей продольной осью вертикально, ортогонально плоскости сканирования. Как видно из фиг. 1, фазовое распределение сигналов в элементах решетки зависит от угла места отражающего объекта. Сигналы с элементов решетки (4) поступают на блок приемников (5), куда также поступает сигнал с задающего генератора (3), частота которого связана с несущей частотой зондирующего сигнала. После преобразования аналог-цифра в блоке АЦП (6) выходные сигналы поступают в Фурье-процессор. Для обеспечения синхронности всех АЦП блока АЦП (6) на них также подается синхронизирующий сигнал генератора (3).
Выходным сигналом Фурье-процессора (7) является мгновенное значение угла наклона фазового фронта отраженного сигнала при данном положении луча передающей антенны, т.е. при данном азимуте и данной дальности. Формирование трехмерного радиолокационного изображения по этим данным осуществляется в процессоре трехмерного изображения (9), для чего на него поступает также сигнал со сканера (8) о положении антенны (1), т.е. о мгновенном значении азимута.
Трехмерное изображение поступает через сумматор (10) на цифровой монитор (13), где в плоскости экрана монитора формируется азимутально-угломестная составляющая изображения. Для отображения дальности каждому элементу дальности ставится в соответствии яркость свечения экрана черно-белого монитора или цвет экрана цветного монитора. Таким образом, на мониторе отображается картина внешней обстановки, весьма похожая на ту, которую видит экипаж при визуальном наблюдении. Только в отличие от визуальной картины на мониторе точнее передается дальностная составляющая. Это позволяет экипажу хорошо ориентироваться во внешней обстановке не только при отсутствии визуальной видимости, но и при ее наличии.
Трехмерное радиолокационное изображение также поступает и на процессор сегментации угрожаемых объектов (11), в котором при наличии объектов в секторе ответственности формируется сигнал тревоги, поступающий на сигнализатор тревоги (12). (Сегментация изображения - выделение той части изображения, для которой выполняются некоторые условия, например дальность, азимут и угол места лежат в определенных пределах. Такие процедуры описаны, например, в книге: Г. П. Катыс, Обработка визуальной информации, Москва, Машиностроение, 1990, стр. 13 - 14). Одновременно на цифровой монитор (13) через сумматор (10) поступает сегментированный сигнал угрожаемого объекта, на основе которого на экране монитора интенсивностью или цветом выделяется зона нахождения угрожаемого объекта. Эта информация позволяет экипажу принять верное решение о выходе из опасной ситуации.
Реализация предлагаемого устройства наиболее удобна с максимальным применением цифровой техники. Так Фурье-процессор может быть выполнен на специализированном микропроцессоре широкого применения, например серии TMS. Процессор трехмерного изображения, процессор сегментации угрожаемых объектов и сумматор удобней всего выполнять на компьютере соответствующего обрабатываемым массивам информации типа, например "Pentium". В качестве цифрового монитора целесообразно использовать цветной монитор с активной матрицей, часто применяемом в компьютерах типа Note Book. Сигнализатором тревоги может быть любой электроакустический прибор - звонок, сирена и т.д. Сканером может служить любое электромеханическое поворотное устройство традиционного типа, выполненное, например, на основе электродвигателя, редуктора и датчика угла поворота.
Приемники, входящие в блок приемников, должны быть одинаковыми и строиться по классической супергетеродинной схеме, т.е. с цепями гетеродина, смесителя промежуточной частоты. В качестве гетеродинного сигнала используется сигнал с задающего генератора, общий для всех приемников.
Аналого-цифровые преобразователи, входящие в блок АЦП, также должно быть одинаковыми. Для понижения частоты сигнала на входе АЦП перед аналого-цифровым преобразованием может быть установлены смесители выходных сигналов приемников с сигналом задающего генератора, общего для всех АЦП, т.е. применена широко известная схема с двойным преобразованием частоты. Если же первая промежуточная частота входит в рабочий частотный диапазон АЦП, то можно обойтись без второго преобразования. В любом случае все АЦП должны работать синхронно, для чего тактовые импульсы АЦП целесообразно формировать из сигнала с задающего генератора. Для организации обмена нескольких АЦП с Фурье-процессором на выходе каждого АЦП должны иметься буферные цепи для кратковременной памяти информации. Во многих современных АЦП эти цепи являются составными частями микросхем АЦП.
| название | год | авторы | номер документа |
|---|---|---|---|
| ФАЗОВЫЙ ПЕЛЕНГАТОР | 1998 |
|
RU2143707C1 |
| АКУСТИЧЕСКИЙ КОМПЬЮТЕРНЫЙ МАММОГРАФ С ТРЕХМЕРНОЙ ВИЗУАЛИЗАЦИЕЙ | 1998 |
|
RU2139679C1 |
| УЛЬТРАЗВУКОВОЙ ДИАГНОСТИЧЕСКИЙ КОМПЛЕКС ДЛЯ ФОРМИРОВАНИЯ И ВИЗУАЛИЗАЦИИ ТРЕХМЕРНЫХ ИЗОБРАЖЕНИЙ | 1997 |
|
RU2125836C1 |
| СПОСОБ ОБРАБОТКИ РАДИОЛОКАЦИОННОГО СИГНАЛА ИМПУЛЬСНОГО КОГЕРЕНТНОГО РАДИОЛОКАТОРА БОКОВОГО ОБЗОРА | 2002 |
|
RU2229728C1 |
| СПОСОБ ПОЛУЧЕНИЯ РАДИОЛОКАЦИОННОГО ИЗОБРАЖЕНИЯ УЧАСТКА ЗЕМНОЙ ПОВЕРХНОСТИ И РАДИОЛОКАЦИОННАЯ СТАНЦИЯ С СИНТЕЗИРОВАННОЙ АПЕРТУРОЙ АНТЕННЫ (ВАРИАНТЫ) | 2012 |
|
RU2526850C2 |
| МНОГОФУНКЦИОНАЛЬНАЯ МНОГОДИАПАЗОННАЯ МАСШТАБИРУЕМАЯ РАДИОЛОКАЦИОННАЯ СИСТЕМА ДЛЯ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2011 |
|
RU2496120C2 |
| РАДИОЛОКАЦИОННАЯ СИСТЕМА ПРЕДУПРЕЖДЕНИЯ СТОЛКНОВЕНИЙ ЛЕТАТЕЛЬНОГО АППАРАТА С ПРЕПЯТСТВИЯМИ | 1999 |
|
RU2150752C1 |
| ТРЕХМЕРНАЯ СИСТЕМА ГОЛОГРАФИЧЕСКОГО РАДИОВИДЕНИЯ ДЛЯ ДОСМОТРА | 2017 |
|
RU2652530C1 |
| РАДИОЛОКАЦИОННАЯ СТАНЦИЯ КРУГОВОГО ОБЗОРА | 2012 |
|
RU2522982C2 |
| РАДИОЛОКАЦИОННАЯ СИСТЕМА БЛИЖНЕГО ДЕЙСТВИЯ ДЛЯ ПРЕДУПРЕЖДЕНИЯ СТОЛКНОВЕНИЯ С ПРЕПЯТСТВИЯМИ МАНЕВРИРУЮЩИХ НА АЭРОДРОМЕ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2001 |
|
RU2192653C1 |

Изобретение относится к радиолокации, а точнее к системам обеспечения безопасности полетов. Достигаемый технический результат - выдача информации о наличии в зоне ответственности угрожаемых столкновением объектов в виде трехмерного изображения внешней обстановки. Для этого устройство, содержащее передающую антенну, связанную с передатчиком, и приемную линейную антенную решетку, соединенную с последовательно включенными блоком приемников, блоком аналого-цифровых преобразователей и Фурье-процессором, дополнено сканером, процессором трехмерного изображения, сумматором, процессором сегментации угрожаемых объектов, сигнализатором тревоги и цифровым монитором. Сканер связан с передающей антенной и с процессором трехмерного изображения, другой вход которого соединен с выходом Фурье-процессора, а выход подключен ко входам сумматора и процессора сегментации угрожаемых объектов, один выход которого связан с сигнализатором тревоги, а другой - со входом сумматора, к выходу которого подключен цифровой монитор. 2 ил.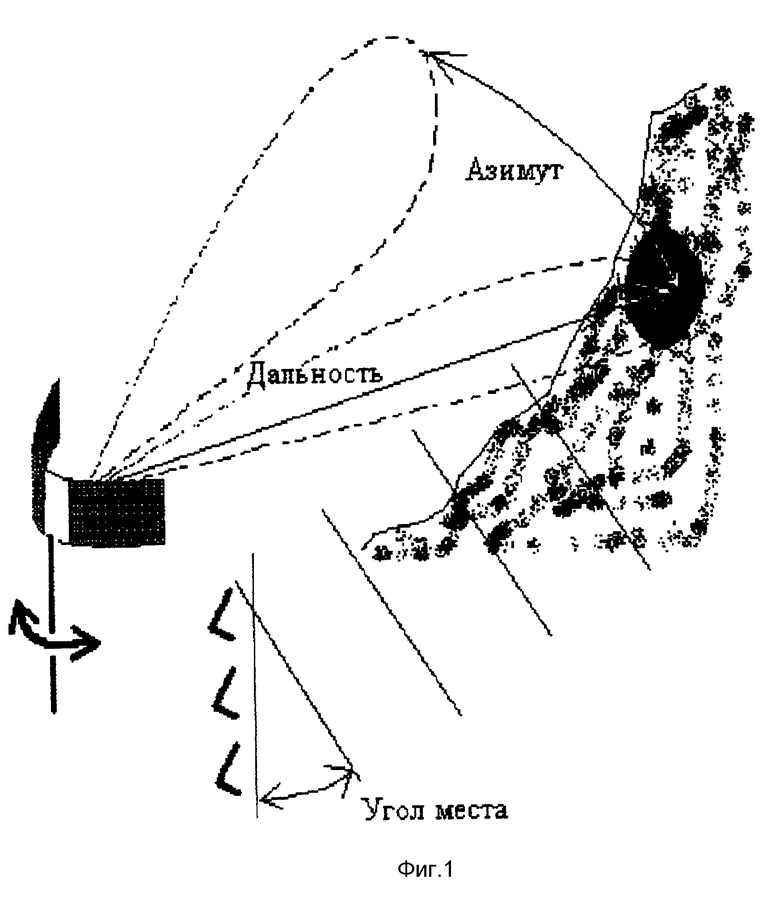
Устройство индикации опасности столкновения летательного аппарата, содержащее передающую антенну, подключенную к импульсному передатчику, связанному с первым выходом задающего генератора, приемную линейную антенную решетку, каждый элемент которой соединен со входом соответствующего приемника блока приемников, второй вход которого соединен со вторым выходом задающего генератора, а выход каждого приемника подключен ко входу соответствующего аналого-цифрового преобразователя блока аналого-цифровых преобразователей, второй вход которого соединен с третьим выходом задающего генератора, а выходной сигнал каждого аналого-цифрового преобразователя подключен к соответствующему входу Фурье-процессора, отличающееся тем, что в него дополнительно введены сканер, механически связанный с передающей антенной для ее поворота в ортогональной по отношению к оси приемной решетки плоскости, процессор трехмерного изображения, один вход которого подключен к выходу Фурье-процессора, а другой - к цифровому выходу сканера, сумматор, один из входов которого подключен к выходу процессора трехмерного изображения, процессор сегментации угрожаемых объектов, вход которого соединен с выходом процессора трехмерного изображения, а один из выходов соединен со вторым входом сумматора, сигнализатор тревоги, вход которого подключен ко второму выходу процессора сегментации угрожаемых объектов, цифровой монитор, вход которого соединен с выходом сумматора.
| JP 5246479 A1, 25.11.77 | |||
| US 4825213 A, 25.04.89 | |||
| ЭЛЕКТРИЧЕСКИЙ РЕАКТОР С ПОДМАГНИЧИВАНИЕМ | 1992 |
|
RU2037222C1 |
| RU 93004769 A1, 20.12.96 | |||
| US 4495580 A, 22.01.85 | |||
| Катыс Г.П | |||
| Обработка визуальной информации | |||
| - М.: Машиностроение, 1990, с,13 - 14. | |||

