Известен пневмопривод механизмов автоматизированных машин различного назначения, описываемый в книге "Основы автоматизации производственных процессов" Н.Ф. Уткина, Лениздат, 1978, с. 51, в котором ведомое рабочее звено связано со штоком пневмоцилиндра, напорные полости пневмоцилиндра трубопроводами связаны через пневмораспределители и регуляторы, с источником сжатого воздуха - компрессором. Управление циклом работы машины и отдельного механизма, с пневмоприводом осуществляет командоаппарат непрерывного или прерывистого действия, имеющий свой электромеханический или пневматический привод вращения.
Комплект пневмораспределительной и регулирующей аппаратуры для отдельного механизма средней сложности состоит из трех воздухораспределителей и двух обратных клапанов с дросселями.
Кроме того, для случаев движения ведомого звена с изменяющейся в течение хода скоростью, применяется тормозной золотник с путевым управлением от специального профильного кулачка - страница 47 указанной книги.
Класс машин-автоматов для расфасовки пищевых и непищевых продуктов, для изготовления укупорки, для сборочных операций, работающих в автономных условиях, снабжены индивидуальными компрессорами.
Необходимость компрессора со своим приводом и большое количество пневмоаппаратуры делает конструкцию машины-автомата в целом менее надежной и увеличивает ее стоимость.
Известен пневмопривод механизма фасовочного автомата АФ 97-00.000 для расфасовки пищевых продуктов в стаканчики (конструкции завода имени В.А. Дегтярева, г. Ковров, Владимирской обл.), исключающий применение компрессора с его силовым приводом. В механизме этого пневмопривода источник сжатого воздуха конструктивно совмещен с командоаппаратом и приводится в действие от привода командоаппарата. Пневмопривод состоит из исполнительного силового пневмоцилиндра, со штоком которого связано ведомое звено и вспомогательного пневмоцилиндра "накачки", жестко закрепленного на станине, полости которого двумя трубопроводами связаны с полостями пневмоцилиндра ведомого звена, а шток взаимодействует с профильным кулачком, закрепленным на распределительном валу командоаппарата, обеспечивающим запрограммированный, согласно временной циклограммы автомата, ход штока пневмоцилиндра накачки и запрограммированную подачу из него сжатого воздуха в пневмоцилиндр ведомого звена.
Пневмоцилиндр накачки имеет два обратных клапана на входных отверстиях всасывания, пропускающих атмосферный воздух в полости цилиндра во время создания в них вакуума, и два обратных клапана с дросселем на выходных отверстиях, соединяющихся с полостями пневмоцилиндра ведомого звена, служащих для подпора и регулирования скорости штока пневмоцилиндра ведомого звена при его движении в обоих направлениях.
Наличие пневмоцилиндра накачки в виде отдельного узла, наличие четырех обратных клапанов в механизме с двухсторонним пневмоцилиндром ведомого звена, и невозможность регулировки скорости для случаев движения ведомого звена по сложному скоростному закону (из-за неменяющейся настройки дросселя обратных клапанов) являются недостатком этого механизма.
Для устранения этих недостатков в предлагаемом пневмоприводе механизма ведомое звено соединено со штоком двухстороннего исполнительного пневмоцилиндра, полости которого трубопроводами связаны с выходными отверстиями роторного кулачкового пневмонасоса, установленного на главном валу автомата. Роторный насос имеет разъемную, закрепленную на станине машины, полую камеру, размещенный в ней и установленный на главном валу машины ротор-кулачок с образованием напорной рабочей полости расчетного объема - для обеспечения требуемого давления накачки, и подпружиненную лопатку в направляющем пазу камеры, перекрывающую напорную полость при скольжении по ротору-кулачку.
На цилиндрической поверхности ротора выполнена переточная канавка и канал для соединения полости канавки с атмосферой и напорной рабочей полостью. На части переточной канавки выполнена перемычка с дроссельной щелью переменного расчетного сечения, определяющей закон движения ведомого звена, перекрывавшая во время вращения ротора выхлопное отверстие камеры насоса. По технологическим соображениям дроссельная щель может быть заменена цепочкой дроссельных отверстий одинакового диаметра с расчетным шагом, или отверстиями разного расчетного диаметра с одинаковым шагом.
В такой конструкции отсутствует отдельный пневмоцилиндр, а ротор насоса с дроссельной щелью, выполняет функции программного кулачка и пневмораспределителей, обеспечивая за счет дроссельной щели переменного сечения более гибкую регулировку, скорости хода ведомого звена, без применения четырех обратных клапанов, что является преимуществами конструкции по сравнению с прототипом. Изобретение поясняется чертежами, на которых представлены: на фиг. 1 - конструктивная схема пневмопривода механизма сталкивателя автомата расфасовки, с двухкамерным насосом накачки; на фиг. 2 - разрез А-А; на фиг. 3 - вариант конструкции однокамерного пневмонасоса накачки для простого цикла движения ведомого звена; на фиг. 4 - разрез Б-Б; на фиг. 5 - вариант конструкции двухкамерного насоса накачки для сложного цикла движения ведомого звена; на фиг. 6 - вариант конструкции насоса накачки для механизма, работающего с передаточным отношением равным двум; на фиг. 7 - блок насосов для трех механизмов автомата, состоящий из двух однокамерных насосов накачки I и III и одного двухкамерного насоса II; на фиг. 8 - 10 - сечения насосов накачки I, II, III.
Средства уплотнения зазоров подвижных и неподвижных соединений пневмоцилиндра и насосов на чертежах условно не показаны. Конструкция и материалы уплотнений широко известны и выбираются из условий работы.
На всех чертежах детали и элементы конструкции, имеющие одинаковое назначение, обозначены одинаковыми цифрами. Стрелками указано направление вращения роторов.
Пневмопривод на фиг. 1 - 2 состоит из ведомого рабочего звена - вилки 1, жестко соединенной со штоком 2 двухстороннего пневмоцилиндра, закрепленного на корпусе машины.
На штоке 2 закреплен поршень 3, в гильзе 4 или крышках 5 выполнены два отверстия 6, соединяемые трубопроводами 7 с выходными отверстиями 8 двух камер 9 роторного пневмонасоса.
Ведущими звеньями являются два ротора 10, закрепленные на главном валу 11 машины.
Диаметр цилиндрической части ротора 10 равен диаметру расточки камер 9 с зазором, обеспечивающим свободное движение ротора. На поверхности ротора 10 выполнена криволинейная поверхность 12 с расчетным профилем, образующим с корпусом камеры 9 рабочую напорную полость 13.
Исходными данными для расчета профиля поверхности 12 являются:
суммарный объем рабочих полостей пневмоцилиндра ведомого звена, внутреннего объема соединяющих трубопроводов 7 и полость 27 регулятора давления;
конструктивно выбранная ширина ротора 10;
величина давления сжатого воздуха, подаваемого в пневмоцилиндр ведомого звена, - величина давления накачки - в различные моменты цикла (на разных отрезках хода) в зависимости от угла поворота ротора 10.
На цилиндрической части ротора 10 выполнена переточная канавка 14, шириной меньше ширины лопатки 15. Канавка 14 исходит от начальной части поверхности 12, а ее длина от начала поверхности 12 определяется углом поворота ротора до момента прихода лопатки 15 второй камеры к началу криволинейного участка 12 ее ротора.
В переточной канавке 14, на части длины канавки выполнена перемычка 16 перекрывающая, во время выхлопа сжатого воздуха, выходное отверстие 8. На перемычке 16 на всей ее длине выполнена дроссельная щель 17 переменного расчетного сечения или цепочка дроссельных отверстий, расположенная в зоне "В" боковой щелевой прорези 18 отверстия 8, обеспечивающая за счет переменного пневмодинамического сопротивления со стороны дроссельной щели или дроссельных отверстий, заданный закон движения ведомого звена в течение всего хода. В самом начале дроссельной щели выполнен участок большого сечения или отверстие 29, обеспечивающее мгновенное выравнивание давления, оставшегося в пневмоцилиндре после окончания хода, с атмосферным, имеющимся в переточной канавке 14.
Исходными данными для расчета профиля дроссельной щели 17 являются вытесняемые объемы воздуха из пневмоцилиндра ведомого звена за выбранные промежутки времени с учетом заданной скорости ведомого звена и величины необходимого противодавления в выхлопной полости пневмоцилиндра, создаваемого дроссельной щелью, обеспечивающего постоянное торможение ведомого звена до заданной скорости.
Дроссельная щель 17 может быть одного из двух типов, представленных на фиг. 2, или в виде сквозной прорези переменной ширины "h", или в виде переменного зазора " Z " между цилиндрической поверхностью расточки камеры 9 и профильной поверхностью 19, выполненной на перемычке 16.
Боковая щелевидная прорезь 18, шириной, составляющей 10-15% диаметра отверстия 8, обеспечивает более гибкое изменение скорости ведомого звена за счет многократного расширения диапазона размеров "h" и "Z", и устраняет необходимость изготовления дроссельной щели с микроразмерами (в случае расположения дроссельной щели в зоне отверстия 8).
Лопатка 15 установлена в направляющем пазу стенки камеры 9 на расстоянии 0,2-0,5 толщины лопатки позади выходного отверстия 8 и подпружинена пружиной 20. Пружина 20 постоянно удерживает лопатку 15 в контакте с поверхностью ротора 10. Ширина лопатки 15 равна ширине ротора 10.
Торцевые стенки 21 камер 9 насоса стыкуются через уплотнения. Комплект камер 9 и торцевых стенок 21 стягивается в единое целое планкой 22, шпильками 23, гайками 24.
Внутри вала 11 и роторов 10 проходит канал 25, связывающий переточные канавки 14 с атмосферой. Камеры 9 двухкамерного насоса установлены относительно друг друга в согласованное положение, при котором лопатка 15 одной камеры расположена на начале криволинейного участка 12, а другая лопатка 15 в это время расположена на начале переточной канавки 14 своего ротора.
Установку в согласованное положение производят разворотом камер 9 вокруг оси главного вала 11.
В пневмоприводе, требующем тонкой регулировки времени выполнения ходов и для корректировки неточности расчета и изготовления дроссельной щели 17 выполняется объемный регулятор, состоящий из вытеснителя 26 и полости 27, объединяющейся отверстием 28 и трубопроводом 7 с полостью пневмоцилиндра ведомого звена. Полный объем полости 27 берется в пределах 0,3-0,4 от объема полости пневмоцилиндра ведомого звена. Регулятор обеспечивает эффективную и простую регулировку давления в полостях пневмоцилиндра ведомого звена за счет изменения объема полости 27 при выдвижении вытеснителя 26.
Методика расчета криволинейного участка 12 и объема полости 13 учитывает две стадии работы насоса накачки. На первой стадии при вращении ротора 10 осуществляется предварительное сжатие атмосферного воздуха, находящегося в трубопроводе 7 полости 27 регулятора и полости 13 до давления, при котором происходит строгивание с места ведомого звена. Это давление известно из знания начальной нагрузки и приведенной массы ведомого звена.
Угловой ход ротора и время этой стадии не входят в состав времени цикла движения ведомого звена, поэтому протяженность и форма начальной части участка 12 могут быть произвольными и определяются только целесообразной геометрической крутизной участка.
На второй стадии при увеличении скорости движения ведомого звена и нарастании нагрузки на ведомое звено осуществляется дополнительное сжатие воздуха до более высокого давления, обеспечивающего требуемую величину ускорения ведомого звена с приведенной массой, а при замедлении движения - понижение давления в напорных полостях.
Инерционные и рабочие нагрузки на ведомое звено и связанное с ними давление воздуха в пневмоцилиндре ведомого звена определяется методами "теорий механизмов и машин" для наиболее характерных точек траектории движения ведомого звена, или для последовательного ряда точек траектории, выбранных через равные интервалы. Каждой выбранной точке траектории соответствует определенное давление воздуха в цилиндре ведомого звена, свое угловое положение лопатки 15 на криволинейном участке 12, то есть угловая координата кривой 12, и суммарные объемы полостей, находящихся перед лопаткой, включая полости пневмоцилиндра трубопровода, регулятора и самой полости 13.
Зная последовательное значение объемов для конкретных угловых положений лопатки 15, определяют вторую - радиальную координату лопатки для каждого объема, выражаемую как расстояние от оси вращения ротора до кривой 12. По этим координатам строится профиль участка 12.
Расчет текущих значений объемов напорной полости 13 производится в последовательности, обратной ходу ведомого звена, начиная с конечного положения ведомого звена и конечной точки криволинейной поверхности 12. Исходными величинами для расчета являются полный объем полости пневмоцилиндра ведомого звена в сумме с объемом трубопровода и средней величиной объема полости 27 объемного регулятора, если он существует в конструкции, и коэффициенты сжатия воздуха в зависимости от требуемого давления для данного конкретного положения ведомого звена.
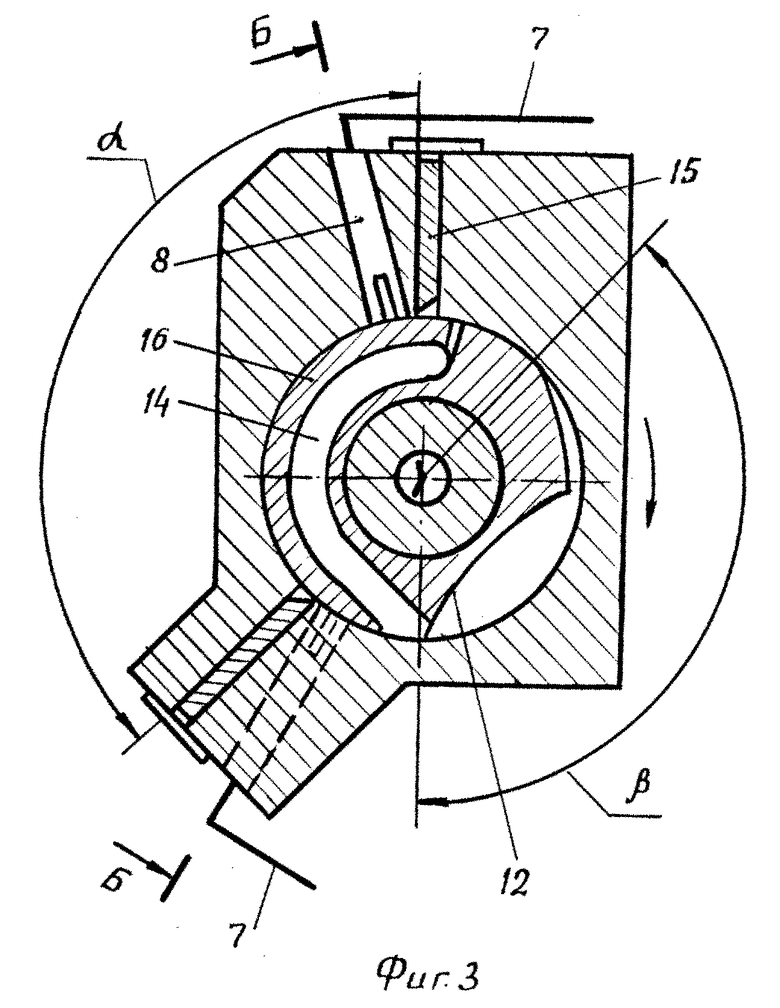
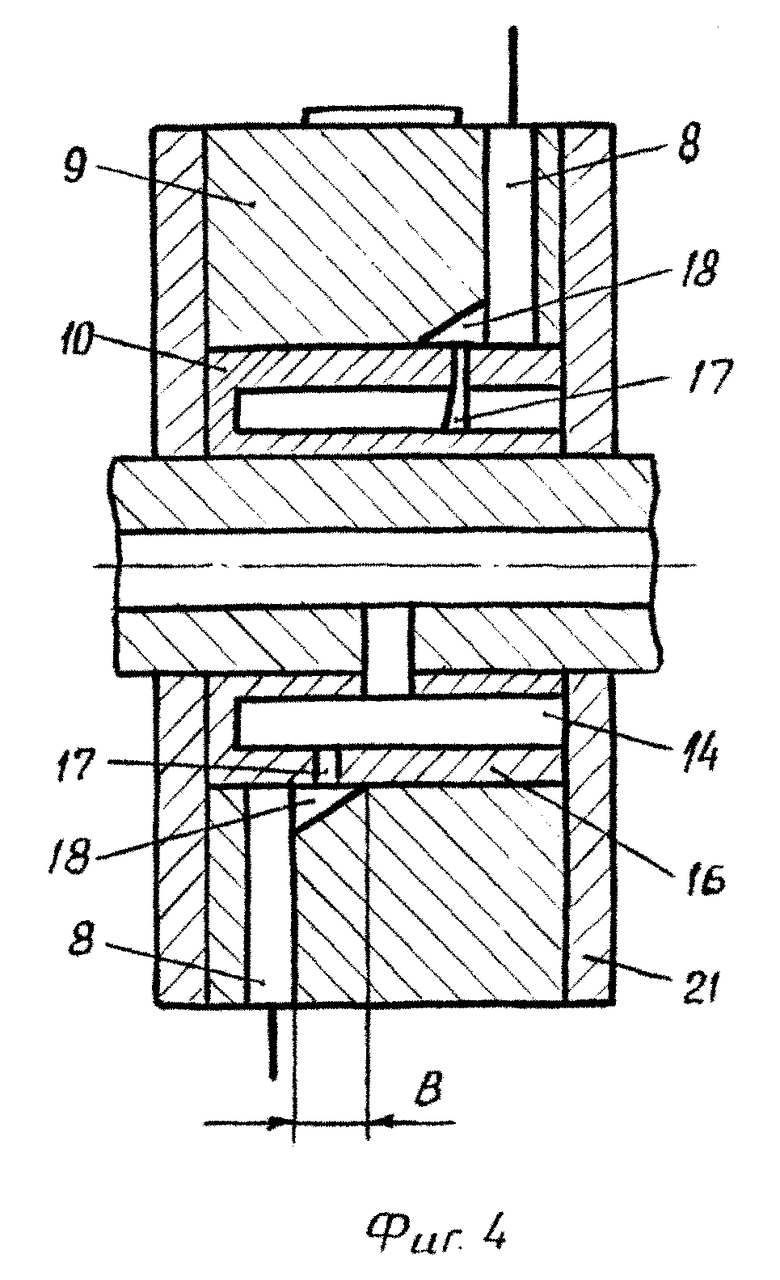
Рассмотренный привод обеспечивает, как видно из конфигурации ротора 10, цикл движения толкателя автомата, состоящий из медленного прямого хода, быстрого отвода и выстоя в отведенном положении. На фиг. 3 - 4 приведен вариант конструкции однокамерного насоса накачки для механизма машины, в котором цикл движения ведомого звена состоит из хода вперед, выстоя заданной длительности, обратного хода такой же длительности как ход вперед, и выстоя в исходном положении до начала следующего цикла.
В этой конструкции несмотря на то, что прямой и обратный ход совершаются за одинаковое время, но скорости ходов изменяются по разным законам за счет выполнения двух разных по профилю дроссельных щелей 17. Для этого в конструкция камеры проходные отверстия 8 с боковыми прорезями 18 расположены в разных плоскостях вращения - со смещением относительно друг друга по ширине ротора, а разные дроссельные щели 17 в перемычке 16 расположены каждая в зоне "В" боковой прорези 18 своего отверстия 8.
Лопатки 15 смещены по углу вращения на угол α, величина которого определяет время выстоя ведомого звена в переднем крайнем положении, равное времени поворота ротора от угла β до угла α, где угол β равен угловой протяженности криволинейного участка 12 ротора.
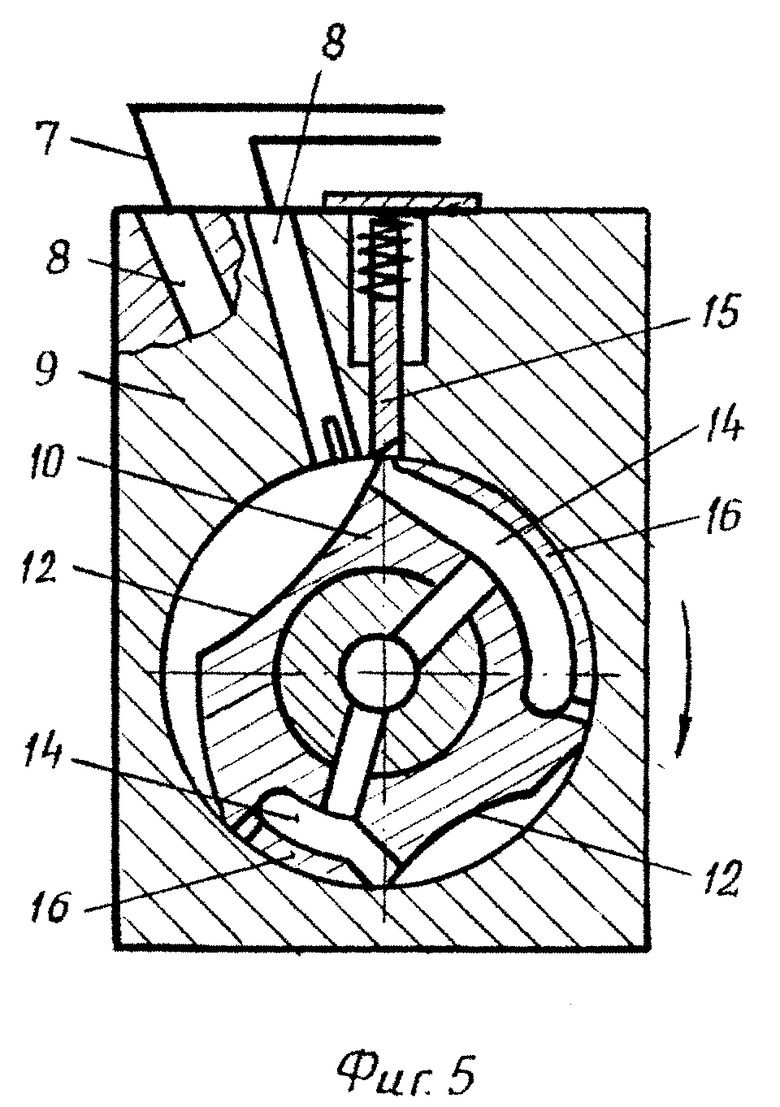
На фиг. 5 приведена конструкция двухкамерного пневмонасоса с двумя роторами, обеспечивающая сложный цикл движения ведомого звена, состоящий из хода вперед в крайнее положение - отхода, назад в промежуточное положение - возврата в переднее крайнее положение и отхода назад в исходное положение.
Все хода могут совершаться с разными скоростями, определяемыми длиной участков 12 и профилем дроссельных щелей 17.
Такой цикл присущ, например, механизмам переноса изделия в рабочую зону машины, когда захват должен немного отойти от изделия на время выполнения операции в рабочей зоне.
Поэтому на роторах 10 выполнены по два криволинейных участка 12 разной протяженности, а на цилиндрической части, выполнены по две переточные канавки 14 разной протяженности, каждая из которых имеет перемычку 16 с отличающейся дроссельной щелью 17, и связана со своим криволинейным участком 12 и с атмосферой.
Характерной особенностью построения профиля обоих роторов 10 двухкамерного насоса накачки является то, что протяженность криволинейного участка 12 одного ротора равна длине перемычки 16 или дроссельной щели 17 второго ротора.
На фиг. 6 показан однокамерный насос с одним ротором для привода механизма, работающего с передаточным отношением равным двум, с простым циклом движения ведомого звена, состоящим из хода вперед и назад, без остановок в крайних положениях.
В нем на роторе 10 имеются две одинаковые криволинейные поверхности 12 и две одинаковые переточные канавки 14 с одинаковыми дроссельными щелями 17 в перемычках 16, расположенные на поверхности ротора через 180oC. Это дает возможность за один оборот ротора насоса связанному с ним пневмоцилиндру ведомого звена выполнить два одинаковых цикла движения.
Однокамерные конструкции пневмонасосов накачки могут обеспечивать работу только механизмов, имеющих одинаковую по времени продолжительность прямого и обратного хода. В механизмах автоматов требующих разные скорости прямого и обратного хода ведомого звена применяются двухкамерные насосы накачки, два ротора которых имеют разную длину криволинейных участков 12.
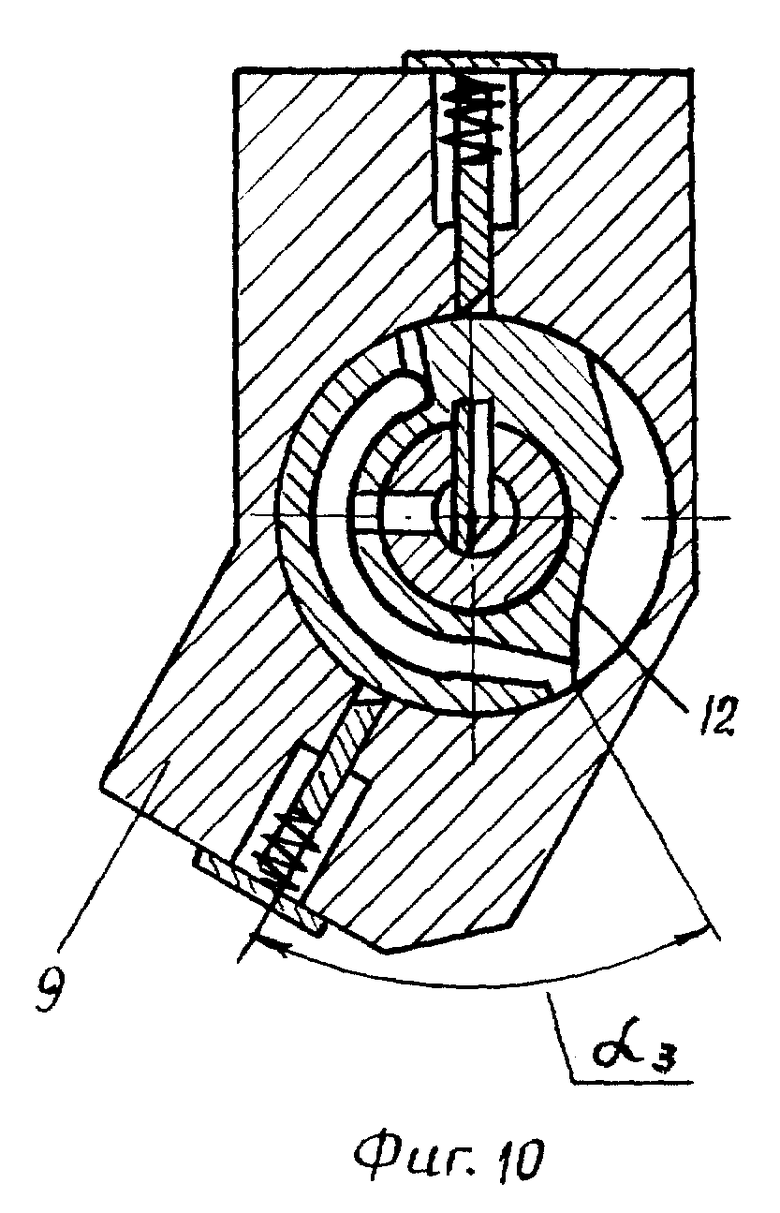
На фиг. 7 - 10 показан блок насосов для трех разных механизмов автомата для иллюстрации согласованного взаимодействия отдельных ведомых звеньев автомата между собой.
На главном валу 11 расположены роторы пневмонасосов I, II, III, установленные на шпонках 30 в неизменное положение, имеющие отверстия 31 для прохода воздуха из общего центрального канала 25 главного вала, связанного с атмосферой.
Камеры 9 насосов с расположенными в них подпружиненными лопатками 15 и неподвижными стенками 21 установлены с углами α1,α2,α3 относительно выбранного исходного положения роторов 10 и имеют возможность поворота вокруг оси роторов на любой угол с фиксацией в заданном положении за счет сил трения с помощью планки 22, шпилек 23 и гаек 24.
Согласование работы ведомых звеньев автомата производят при сборке установкой камер 9 на определенный угол α относительно начала криволинейного участка 12 роторов, согласно циклограммы работы автомата, точно так же, как устанавливаются кулачки на распределительном валу в известных механических автоматах с кулачковой системой управления, а окончательная наладка производится корректировкой этих углов, как при сборке того же механического автомата.
Сравнительный показ сечений трех насосов на фиг. 8 - 10 для одного положения главного вала 11, дает ясное понятие того, что начало движения каждого ведомого звена происходит после подхода к подпружиненной лопатке 15 начального участка криволинейной поверхности 12 ротора, т.е. после поворота главного вала на угол α, определенный циклограммой для конкретного ведомого звена и обеспечивается разворотом камер 9 насосов, что просто выполняется на практике.
Все описанные разновидности пневмонасосов накачки могут работать без каких-либо конструктивных изменений в сочетании с пневмоцилиндром ведомого звена поворотного действия (пневмоцилиндры с лопастью), что необходимо для приводов, в которых ведомое звено имеет поворотно-качательное движение.
При вращении главного вала 11 на фиг. 1 - 2 в направлении стрелки, ведущие роторы 10 перемещаются относительно лопаток 15, которые постоянно поджаты пружиной 20 к их периферийной поверхности. При этом сжимаемый атмосферный воздух, расположенный в напорной полости 13 перед лопаткой 15 начинает через отверстие 8 и трубопровод 7, вытесняться в связанную с ней полость пневмоцилиндра ведомого звена, перемещая шток 2 с ведущим звеном 1 в соответствующем направлении.
Одновременно сжатый воздух из другой полости пневмоцилиндра выталкивается поршнем 3 через отверстие 6, трубопровод 7 и отверстие 8 второй камеры 9 (находящейся на главном валу за первой камерой, показанной на чертеже) и идет на выхлоп через полость переточной канавки 14 второго ротора, поскольку вторая лопатка 15 в это время скользит на цилиндрической части ротора, над перемычкой 16, которая выполнена так, что полностью перекрывает выход воздуху из цилиндрического отверстия 8 большого сечения, направляя вытесняемый воздух через боковую прорезь 18 малой ширины в дроссельную щель 17.
При вращении ротора 10, мимо прорези 18 проходят участки дроссельной щели 17 разной расчетной ширины "h" или "Z" (в зависимости от исполнения), меняя сечение дросселирующего окна, образуемого в пересечении прорези 18 и дроссельной щели 17, чем обеспечивается планируемый динамический подпор в выхлопной полости пневмоцилиндра в любой момент ротора и соблюдение заданного скоростного закона движения ведомого звена.
Кроме этого, освобождающаяся за лопаткой 15, часть напорной полости 13 постоянно заполняется атмосферным воздухом через переточную канавку 14, постоянно связанную с атмосферой.
В дальнейшем при подходе к лопатке 15 конечной части криволинейного участка 12, шток 2, несущий вилку 1, приходит в крайнее переднее положение, а к лопатке 15 второй камеры в это время подходит начало криволинейного участка 12 второго ротора, который выполнен более коротким, чем участок 12 первого ротора, видимого на чертеже, а его длина равна длине перемычки 16 в переточной канавке первого ротора.
При переходе лопатки 15 с криволинейного участка 12 на цилиндрическую часть, другая лопатка 15 сходит с цилиндрической части на криволинейный участок второго ротора, в напорной полости 13 которого начнется процесс сжатия атмосферного воздуха, вследствие чего будет происходить противоположное движение сжатого воздуха в трубопроводах и полостях пневмоцилиндра ведомого звена - и после полного прохождения участка 12 относительно лопатки 15, поршень 3 со штоком 2 и вилкой 1 совершает быстрый обратный ход в исходное положение и цикл работы механизма закончится.
В случае необходимости, например при увеличении рабочей нагрузки на ведомое звено по сравнению с расчетной, увеличивают давление сжатого воздуха в пнемоцилиндре ведомого звена, уменьшая объем полости 27 регулятора давления ввинчиванием вытеснителя 26 внутрь камеры 9.
В случае возникновения ударов ведомого звена, в крайних положениях - уменьшают величину рабочего давления в цилиндре ведомого звена увеличивая объем полосы 27 перестановкой вытеснителя 26.
В конструкции пневмопривода фиг. 3 - 4, обеспечивающим остановки ведомого звена разной длительности в крайних переднем и заднем положении, на цилиндрической поверхности ротора 10 за конечной частью криволинейного участка 12 имеется участок без канавки, полностью перекрывающий отверстие 8 и прорезь 18 при его прохождении.
При работе этого пневмопривода во время прохождения криволинейного участка 12 под лопаткой 15 процесс движения сжатого воздуха по полостям и трубопроводам механизма такой же как в предыдущем пневмоприводе, то есть после прохождения участка 12 ведомое звено приходит в крайнее положение и останавливается.
При дальнейшем вращении ротора лопатки 15 переходит на цилиндрическую часть, где отсутствует канавка 14. Во время прохождения этого участка отсутствует подача воздуха в пневмоцилиндр ведомого звена из отверстия 8 и закрыт выход сжатому воздуху из пнемоцилиндра, вследствие чего ведомое звено остается неподвижным в крайнем переднем положении. Обратный ход ведомого звена начнется в момент прихода криволинейного участка 12 ко второй лопатке и закончится в конце криволинейного участка, после чего остановится и будет неподвижным до завершения полного оборота ротора 10, то есть до повторного прихода криволинейного участка 12 к первой лопатке 15. Удержание ведущего звена неподвижным в исходном положении обеспечивается тем, что в этот период ни одна из лопаток 15 не взаимодействует с криволинейной поверхностью 12 (отсутствует всякое сжатие воздуха) и перекрыт выход воздуху из второго отверстия 8, т.к. на участке перемычки отсутствует дроссельная щель 17.
В пневмонасосах на фиг. 5 - 6 принцип распределения потоков воздуха в полостях ротора и пневмоцилиндра ведомого звена при переходе лопаток 15 с криволинейной поверхности 12 на цилиндрическую часть и обратно и, связанное с этим движение штока 2 с ведомым звеном, аналогичны приводам на фиг. 1 - 3, но в течение цикла роторы 10 дважды изменяют направление потока сжатого воздуха в пневмоцилиндре ведомого звена, вследствие чего ведомое звено за один оборот ротора совершает два возвратно-поступательных движения.
Пневмоприводы с однокамерным пневмонасосом накачки на фиг. 8 и 10 работают так же как пневмопривод на фиг. 3, а процесс работы пневмопривода с двухкамерным насосом накачки на фиг. 9 аналогичен работе пневмопривода на фиг. 1.
Изобретение относится к автоматизированному оборудованию с пневмоприводом, в частности к автоматам расфасовки в тару различных продуктов пищевого и технического назначения.
При использовании изобретения достигается технический результат по увеличению надежности автоматизированных машин и обеспечение движения ведомых звеньев с изменяющейся запрограммированной скоростью.
| название | год | авторы | номер документа |
|---|---|---|---|
| ГИДРОПРИВОД МЕХАНИЗМА АВТОМАТИЗИРОВАННОЙ МАШИНЫ | 1998 |
|
RU2129176C1 |
| ГИДРОПРИВОД МЕХАНИЗМА ШВЕЙНОЙ МАШИНЫ | 1993 |
|
RU2074915C1 |
| ПНЕВМОПРИВОД МЕХАНИЗМА ШВЕЙНОЙ МАШИНЫ | 2000 |
|
RU2190711C2 |
| МЕХАНИЗМ АВТОМАТИЧЕСКОГО СТРЕЛКОВОГО ОРУЖИЯ | 2002 |
|
RU2251650C2 |
| РОТОРНО-ПОРШНЕВОЙ НАСОС-КОМПРЕССОР | 1993 |
|
RU2096662C1 |
| ТЕПЛОТРУБНАЯ ХОЛОДИЛЬНАЯ МАШИНА | 2005 |
|
RU2283461C1 |
| РОТОРНЫЙ ДИСПЕРГАТОР | 1992 |
|
RU2040962C1 |
| СПОСОБ РАБОТЫ ОСЕВОГО ВЕНТИЛЯТОРА И ОСЕВОЙ ВЕНТИЛЯТОР | 2003 |
|
RU2249130C1 |
| Пневматический насос | 1988 |
|
SU1714215A1 |
| Герметичный центробежный экстрактор | 2024 |
|
RU2834085C1 |





Изобретение относится к производcтву и эксплуатации автоматизированного оборудования с пневмоприводом, в частности к пневматическому приводу механизма фасовочного автомата, в котором ведущим звеном является одно или двухкамерный роторный пневмонасос с запрограммированной по объему и давлению подачей сжатого воздуха, а ведомое звено соединено со штоком пневмоцилиндра. Ротор пневмонасоса каждой камеры жестко соединен с главным валом машины, а на роторе выполнена одна или две, в зависимости от сложности цикла движения ведомого звена, криволинейные поверхности переменного радиуса, изменяющегося по заданному закону изменения давления накачки, образующие между стенками камеры и ротором напорные рабочие полости, а в направляющем пазу камеры установлены одна - в однокамерном насосе или две - в двухкамерном насосе подпружиненные лопатки, перемещающиеся в направлении к криволинейной поверхности ротора с возможностью перекрытия сечения напорной рабочей полости. На цилиндрической поверхности ротора выполнены одна иди две переточные канавки и отверстия, соединяющие напорные рабочие полости с атмосферой, имеющие на всей длине канавки, или на ее части, перемычку с дроссельной щелью переменного расчетного сечения, обеспечивающей заданный закон движения ведомого звена и расположенной в зоне сливного отверстия камеры. Технический результат - простота конструкции, обеспечение более гибкой регулировки скорости хода ведомого звена. 3 з.п.ф-лы, 10 ил.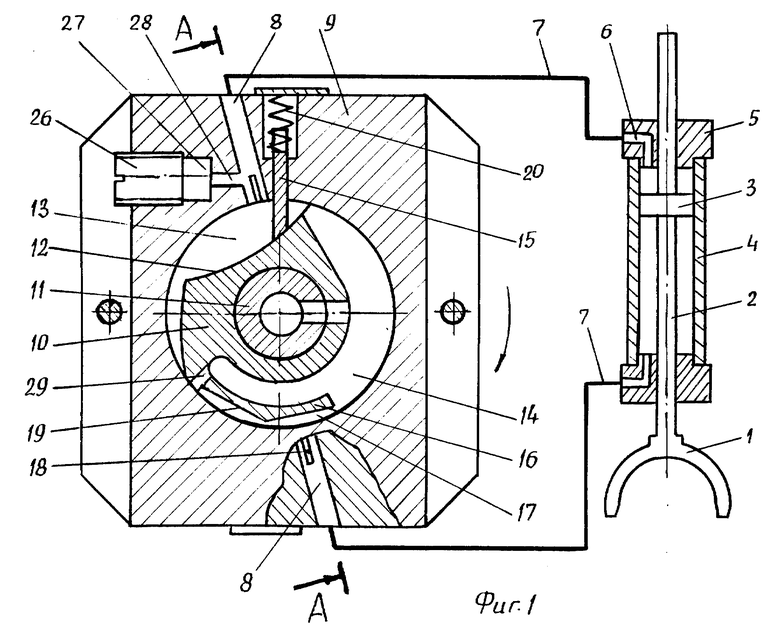
| Уткин Н.Ф | |||
| Основы автоматизации производственных процессов | |||
| - Л.: Лениздат, 1978, с.51 | |||
| Устройство для волочения металла | 1977 |
|
SU668733A1 |
| Пневматические устройства и системы в машиностроении: Справочник /Под ред.Е.В.Герца | |||
| - М.: Машиностроение, 1981, с.29, 78 | |||
| Чупраков Ю.И | |||
| Основы гидро- и пневмоприводов | |||
| - М.: Машиностроение, 1966, с.150. | |||
