Известны механизмы автоматов для расфасовки продуктов пищевого и технического назначения, сборочных автоматов, механизмы швейных машин - с кулачковым приводом, в которых движение от ведущего звена - кулачка, расположенного на главном валу, передается рабочему ведомому звену через систему промежуточных кинематических звеньев, см. книгу "Основы автоматизации производственных процессов", Н.Ф. Уткин, Лениздат, 1978 г., стр. 83.
Недостатками этих механизмом является то, что наличие цепи промежуточных звеньев с их направляющими, опорами трения и дополнительной массой увеличивает энергопотребление, в высокопроизводительных машинах создает повышенные вибрации и шум. Механизмы с лишними звеньями уменьшают надежность, увеличивают массу и габариты машины, повышают затраты на изготовление.
Известен гидропривод механизма швейной машины по патенту RU N 2074915, 10.03.97, с гидропередачей движения от ведущего звена к ведомому звену, в котором отсутствуют промежуточные звенья и поэтому исключаются отмеченные недостатки автоматов с кулачковым приводом механизмов.
В этом гидроприводе ведомое рабочее звено связано со штоком гидроцилиндра, а гидроцилиндр трубопроводами соединяется с роторным кулачковым гидронасосом, установленным на главном валу швейной машины.
В зависимости от одинаковости или разницы скоростей движения ведомого рабочего звена в прямом и обратном направлениях, насос выполняется однокамерным с одним ротором или двухкамерным с двумя роторами.
В полой камере насоса, неподвижно закрепленной на корпусе швейной головки, размещается ротор, связанный с главным валом, с образованием между ротором и камерой напорной рабочей полости переменного расчетного сечения для обеспечения заданного закона изменения скорости ведомого звена.
Для образования этой напорной рабочей полости на цилиндрической поверхности ротора выполнен один или несколько криволинейных участков с запрограммированным профилем, с которым контактирует поджимаемая пружиной лопатка, скользящая в направляющем пазу камеру насоса. Между криволинейными участками на цилиндрической поверхности ротора выполнены переливные канавки, соединяющие напорные рабочие полости насоса, через трубопроводы, с подпитывающей емкостью, компенсирующей утечки рабочей жидкости.
В этом гидроприводе имеется недостаток, проявляющийся в тем большей степени, чем выше скорость работы и больше масса ведомого звена.
Недостаток заключается в следующем.
В процессе работы при каждом цикле осуществляется разгон и торможение ведомого звена. Во время разгона происходит точная отработка закона движения звена согласно профилю криволинейного участка ротора насоса. При переходе на замедление движения противодавление в полости гидроцилиндра, из которой вытесняется жидкость, зависит, в основном, от давления в подпитывающей емкости и может оказаться меньше давления, развиваемого со стороны инерционно движущегося ведомого звена после разгона, вследствие чего произойдет произвольное вытеснение жидкости в подпитывающую емкость и проскок звена с неконтролируемой скоростью, с возможными ударами в крайних положениях. Движение ведомого звена на второй половине хода с неконтролируемой скоростью может привести к сбою работы машины.
Предлагаемые изобретения решают задачу стабилизации заданной скорости движения ведомого звена механизма в течение всего цикла работы, техническим результатом которой является устранение неконтролируемого инерционного движения ведомого звена в период его торможения после разгона.
Один вариант гидропривода механизма содержит гидроцилиндр, со штоком которого связано рабочее ведомое звено механизма, одно- или двухкамерный роторный кулачковый гидронасос, установленный на главном валу машины и связанный трубопроводами с гидроцилиндром ведомого звена и с подпитывающей емкостью рабочей жидкости. В каждой камере насоса размещен ротор, закрепленный на главном валу машины, на котором выполнены один или несколько криволинейных участков, в зависимости от сложности цикла, образующих внутри камеры напорные полости с расчетным профилем, определяющим закон изменения скорости ведомого звена в течение цикла. На роторе выполнены также одна или несколько переливных канавок с подводящим отверстием, соединяющие профильные напорные полости насоса через линию подпитки с подпитывающей емкостью. В направляющем пазу камеры установлены одна или две, для однокамерного насоса, подпружиненные лопатки, перекрывающие сечение напорной полости с контактированием с рабочей поверхностью ротора. Гидропривод содержит также отсутствующие у наиболее близкого аналога обратный клапан, установленный на линии подпитки между насосом и подпитывающей емкостью, и канал, выполненный в теле лопатки или в камере, подводящий жидкость от торца лопатки, контактирующего с ротором, к ее противоположному торцу, взаимодействующему с пружиной.
Второй вариант гидропривода содержит гидроцилиндр, со штоком которого связано рабочее ведомое звено механизма, одно- или двухкамерный роторный кулачковый гидронасос, установленный на главном валу машины и связанный трубопроводами с гидроцилиндром ведомого звена и подпитывающей емкостью рабочей жидкости. В каждой камере насоса размещен ротор, закрепленный на главном валу машины, на котором выполнены один или несколько криволинейных участков, в зависимости от сложности цикла, образующих внутри камеры напорные полости с расчетным профилем, определяющим закон изменения скорости ведомого звена в течение цикла. На роторе выполнены также одна или несколько переливных канавок с подводящим отверстием, соединяющие профильные напорные полости насоса через линию подпитки с подпитывающей емкостью.
В направляющем пазу камеры установлены одна или две, для однокамерного насоса, подпружиненные лопатки, перекрывающие сечение напорной полости с контактированием с рабочей поверхностью ротора. Конструкция содержит отсутствующую у прототипа перемычку в переливной канавке ротора, выполненную с постоянным перекрытием во время торможения ведомого звена проходного отверстия для жидкости камеры. В этой перемычке, блокирующей свободный слив, в зоне проходного отверстия выполнена дроссельная щель, переменного, по длине щели, расчетного сечения, определяющая заданный закон изменения скорости ведомого звена в период торможения.
Изобретение поясняется чертежами, на которых представлены два варианта конструкции гидропривода, в которых отсутствует недостаток, имеющийся в наиболее близком аналоге.
На фиг. 1 приведена в разрезе конструкция гидропривода с однокамерным насосом и одним ротором в варианте с дросселирующей щелью.
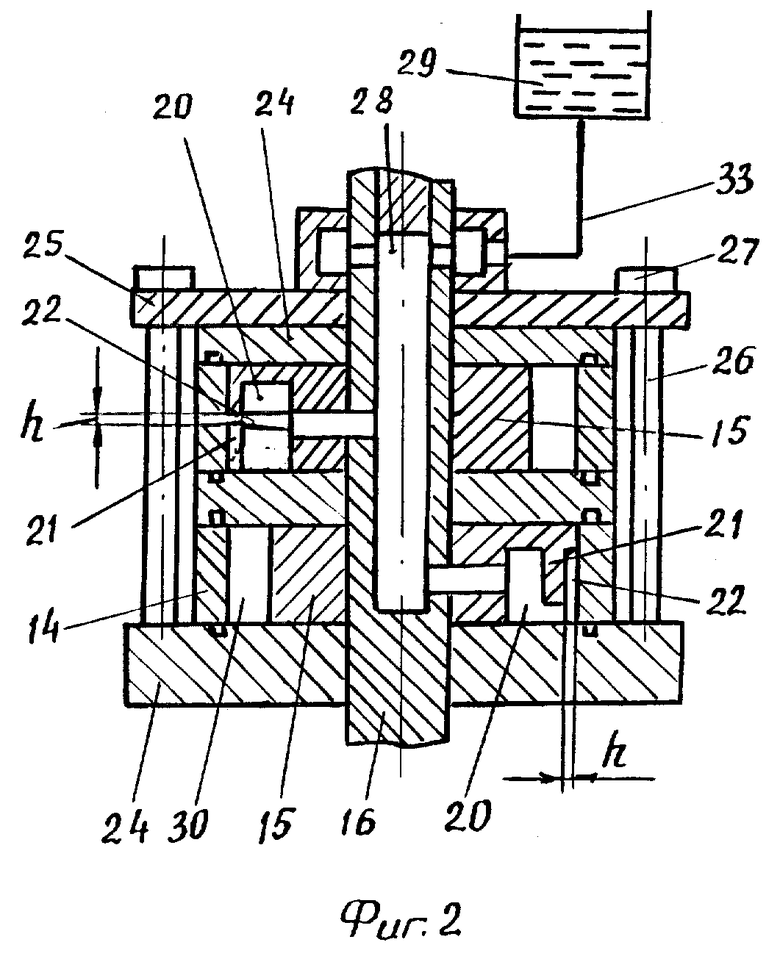
На фиг. 2 дан разрез А-А для двухкамерного насоса с двумя роторами, имеющими разные исполнения дроссельной щели.
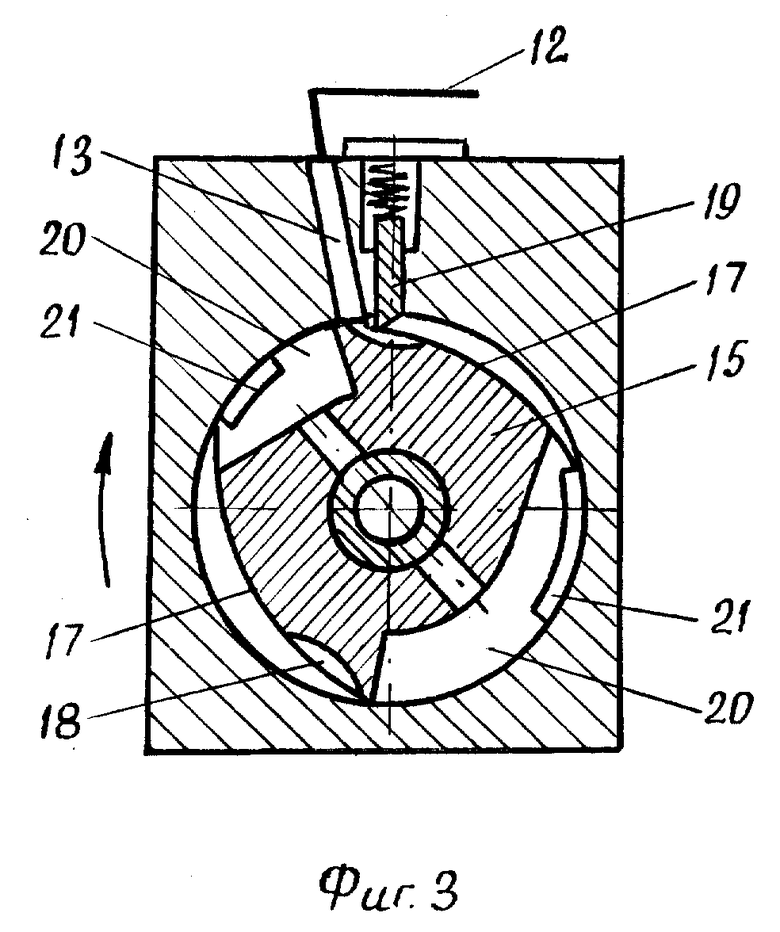
На фиг. 3 приведен насос для сложного случая движения ведомого звена механизма, имеющего за один цикл два движения в одном направлении с разной длиной хода и два движения в противоположном направлении, с дросселирующей щелью, выполненной в перемычке переливной канавки ротора.
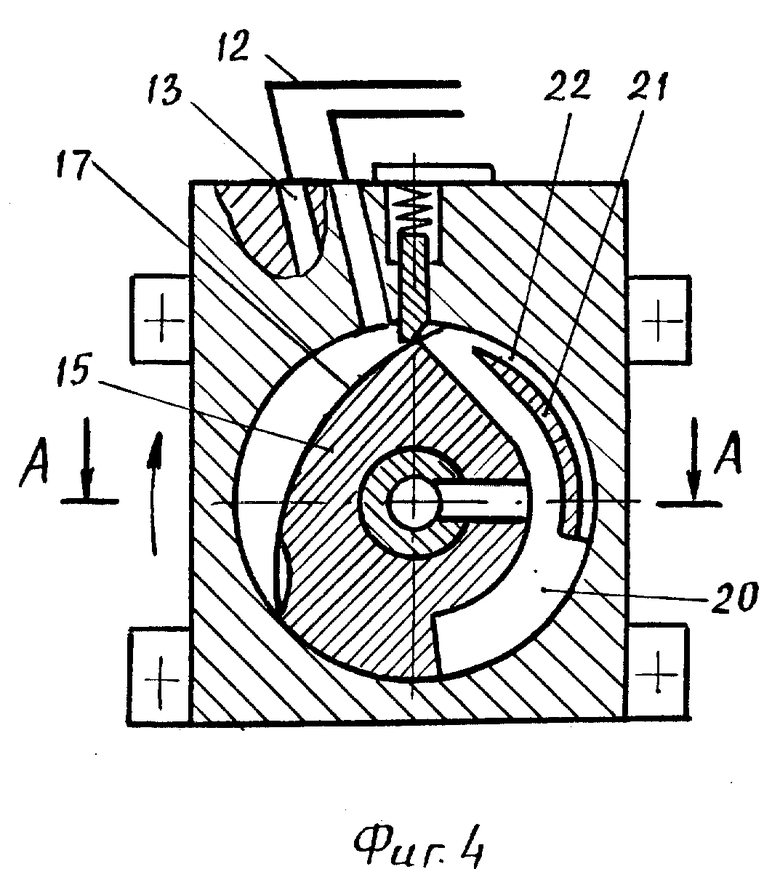
На фиг. 4 приведен в разрезе двухкамерный насос для механизма, имеющего разные по скорости прямой и обратный ход, с дросселирующей щелью, образуемой между перемычкой переливной канавки ротора и корпусом камеры.
На фиг. 5 приведен блок насосов для трех механизмов условной, не имеющей конкретного назначения автоматизированной машины, обозначенных номерами I, II, III, в варианте с обратным клапаном и гидроуравновешенными лопатками.
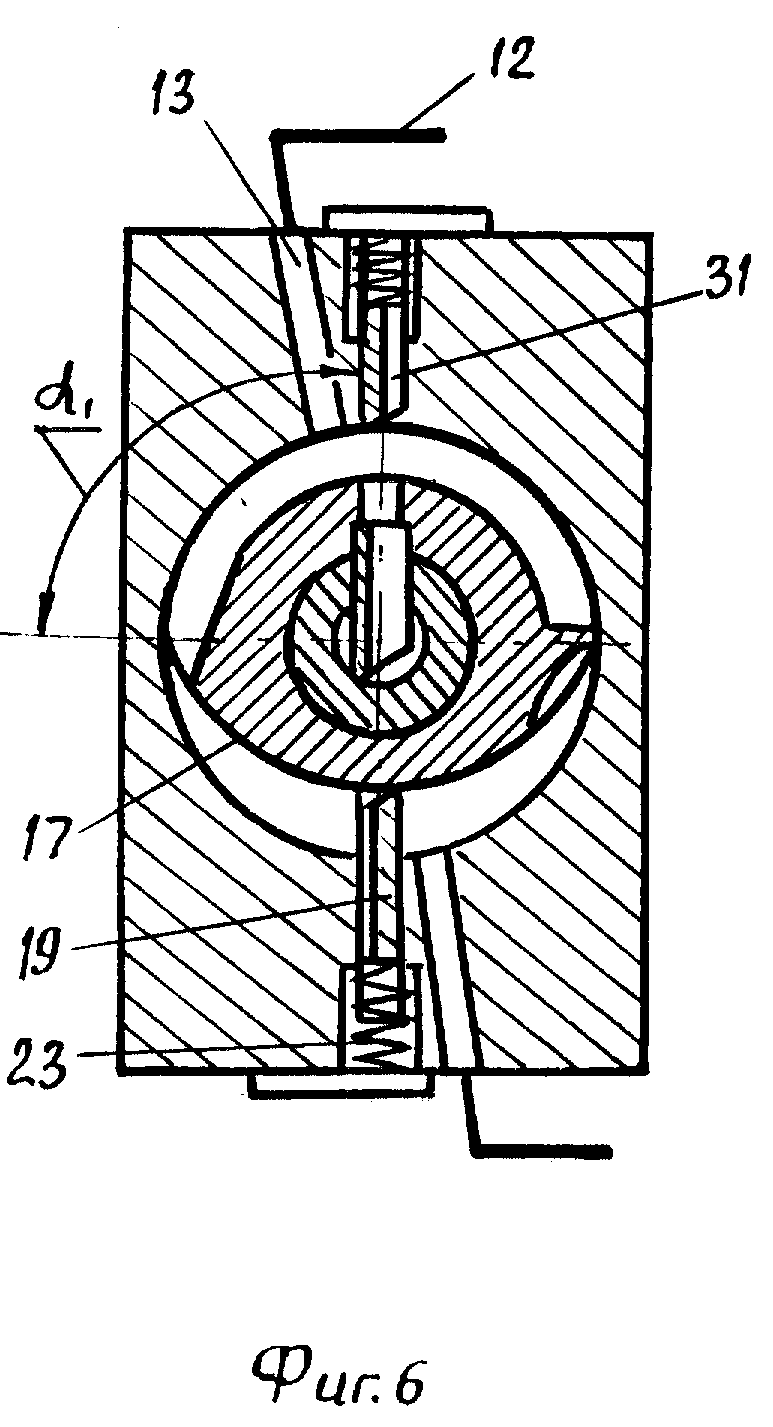
На фиг. 6 дан разрез однокамерного насоса I с фиг. 5.
На фиг. 7 дан разрез по двухкамерному насосу II с фиг. 5.
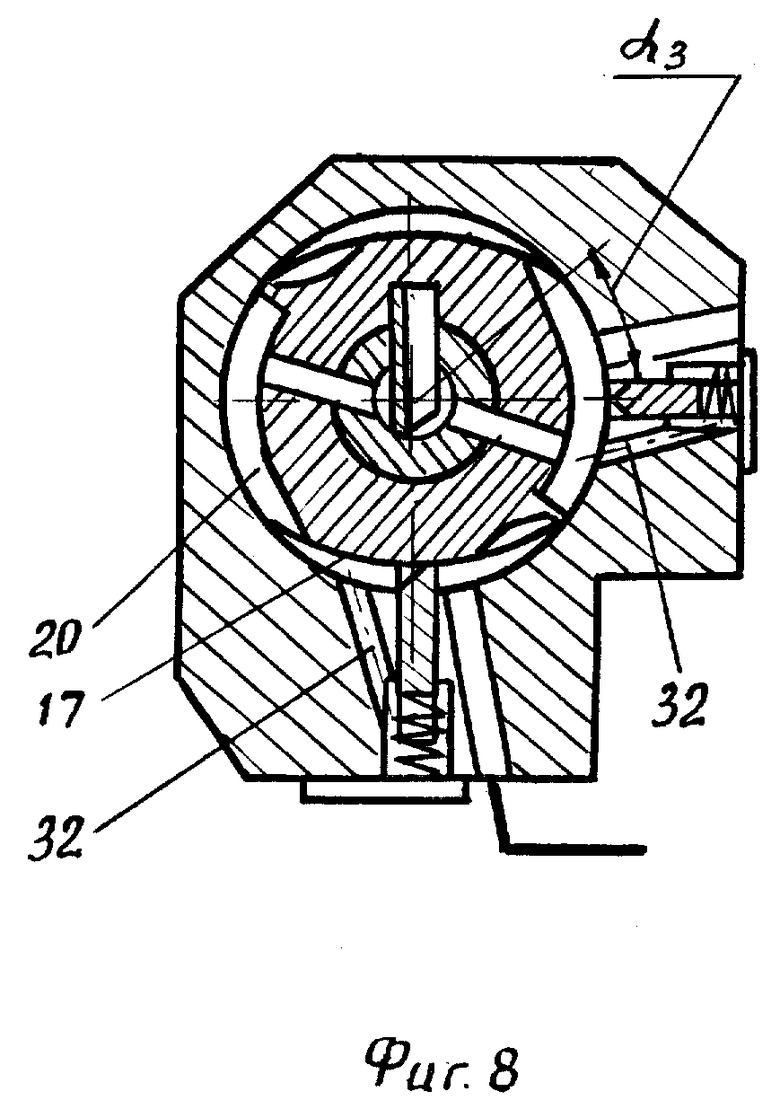
На фиг. 8 дан разрез по однокамерному насосу III для механизма, работающего с передаточным отношением, равным двум.
На всех чертежах детали и элементы, имеющие одинаковое назначение, обозначены одинаковыми цифрами. Стрелками указано направление вращения роторов.
Средства уплотнения подвижных и неподвижных соединений гидроцилиндров и насосов на чертежах условно не показаны. Конструкции и материалы уплотнений широко известны и подбираются из условий работы.
Недостатки гидропривода-аналога устраняются с помощью двух разных конструктивных решений, дающих одинаковый эффект.
Одно решение, показанное на фиг. 1 - 4, заключается в том, что в роторе 15 насоса на части длины переливной канавки 20 выполняется перемычка 21, перекрывающая в период торможения ведомого звена проходное отверстие 13 в камере насоса, через которое происходит вытеснение жидкости из гидроцилиндра в переливную канавку ротора.
Протяженность перемычки соответствует углу поворота ротора за период тормозного движения ведомого звена, от максимального разгона до остановки, и на всем протяжении перемычки на ней в зоне проходного отверстия 13 выполнена дроссельная щель 22, переменного расчетного сечения "h", через которую происходит слив жидкости из гидроцилиндра в переливную канавку ротора. Такая дроссельная щель обеспечивает меняющийся по величине гидродинамический подпор в гидроцилиндре ведомого звена со стороны слива, регулируя скорость движения ведомого звена на стадии торможения, пропорционально ее сечению, обеспечивая этим заданный закон изменения скорости ведомого звена.
Расчет профиля дроссельной щели 22 производится на основании знания массы ведомого звена и связанных с ним частей, рабочего усилия звена и объемов жидкости, вытесняемой из гидроцилиндра в каждый момент времени через щель.
Вытесняемые объемы жидкости известны из условия равенства с объемами жидкости, подаваемыми из напорной полости 30 насоса в противоположную полость гидроцилиндра.
Равенство объемов жидкости, подаваемой в период торможения от насоса и вытесняемой в переливную канавку ротора, обеспечивает дублирование и сохранение заданного закона движения ведомого звена со стороны дроссельной щели, что исключает неконтролируемое движение ведомого звена в течение всего хода.
Другое решение, показанное на фиг. 5 - 8, заключается в том, что на линии подпитки, состоящей из заборного клапана 28 и трубопровода 33 и соединяющей насос с подпитывающей емкостью 29, установлен обратный клапан 34, не дающий жидкости вытесняться из переливной канавки 20 ротора обратно в подпитывающую емкость, а в лопатке 19 или в камере насоса выполнен канал 31 или отверстие 32 для подвода жидкости от торца лопатки 19, контактирующего с ротором 15, к противоположному торцу лопатки, взаимодействующему с пружиной 23, с целью выравнивания гидравлического давления со стороны противоположных торцов лопатки.
Такая конструкция не дает жидкости бесконтрольно вытесняться из полости гидроцилиндра и переливной канавки 20 при любом высоком давлении от действия инерционно двигающегося ведомого звена ни в подпитывающую емкость 29, ни в напорную область профильной полости 30 под лопаткой 19 в связи с невозможностью преодоления усилия пружины и отжатия лопатки от криволинейной поверхности 17 ротора, обеспечивая тем самым в гидроцилиндре постоянный подпор, препятствующий инерционному движению ведомого звена.
Поскольку вытеснение жидкости из гидроцилиндра возможно только в таких объемах, которые высвобождаются в профильной полости 30 при вращении ротора и которые полностью определяют закон движения ведомого звена, то инерционное тормозное движение этого звена будет точно соответствовать заданному закону, определяемому профилем криволинейного участка 17 ротора.
Нужно отметить, что обратный клапан 34, установленный как показано на фиг. 5, является обратным клапаном для всех других механизмов машины.
Привод фиг. 1 - 8 состоит из ведомого звена 1, жестко соединенного со штоком 2 двухстороннего гидроцилиндра, закрепленного на корпусе машины. На штоке 2 закреплен поршень 2 с цилиндрическими уступами 4, а в крышках 5 гидроцилиндра выполнены расточки 6 соответствующего диаметра, образующие при сближении с уступами 4 буферные гидроподушки.
В крышках 5 на участке между расточкой 6 и уплотнением 7 выполнено отверстие 8 с трубопроводом 9 для организации и отвода микроутечек жидкости из зазора в подвижном соединении крышки и штока.
Отверстие 8 выполняют, в основном, в приводах высокоскоростных машин для исключения перегрева рабочей жидкости в изолированных полостях гидроцилиндра, за счет создания обменного перетекания жидкости. В гильзе 10 выполнены два отверстия 11 для прохода жидкости, соединяемые трубопроводами 12 с проходными отверстиями 13 камер 14 роторного гидронасоса.
Ведущими звеньями являются роторы 15, закрепленные на главном валу 16 машины.
Диаметр цилиндрической части ротора 15 равен диаметру расточки камеры 14 с гарантированным зазором, обеспечивающим свободное движение.
На поверхности роторов 15 выполнена криволинейная поверхность 17 с расчетным профилем. Исходным данным для расчета профиля является закон движения ведомого звена в зависимости от угла поворота главного вала, обычно с синусоидальным, но возможно, и с другим законом изменения скорости в течение цикла.
В концевой части криволинейного участка 17, считая по ходу вращения, выполнена противоперегрузочная канавка 18, шириной меньше ширины лопатки 19, а на цилиндрической части ротора 15 - переливная канавка 20. Канавка 20 исходит от начальной части криволинейной поверхности 17 и не доходит на 0,2 - 0,5 толщины лопатки 19 до конца криволинейного участка - для обеспечения минимальной конструктивной перемычки.
Перемычка может иметь и другую, увеличенную расчетную протяженность для обеспечения кратковременного выстоя ведомого звена в крайнем положении.
По одному из вариантов конструкции фиг. 1 - 4 в переливной канавке 20 на части ее длины выполнена перемычка 21, перекрывающая во время слива проходное отверстие 13. Протяженность перемычки по углу поворота ротора равна по величине углу, который занимает часть криволинейной поверхности 17, соответствующую стадии замедления ведомого звена, от максимального разгона до остановки, т.е. периоду торможения.
На перемычке 21, на всей ее длине выполнена дроссельная щель 22, переменного расчетного сечения, расположенная в зоне проходного отверстия 13, обеспечивающая за счет регламентированного слива заданный закон движения ведомого звена в период торможения.
Дроссельная щель 22 может быть одного из двух типов, представленных на фиг. 1 - 4. Или в виде сквозной прорези перемычки - фиг. 3, или оформляется криволинейной поверхностью на внешней цилиндрической части перемычки, образующей дроссельную щель ротором и цилиндрической поверхностью расточки камеры - фиг. 1, 4.
Лопатка 19 установлена в стенке камеры 14 на расстоянии 0,2 - 0,5 толщины лопатки позади проходного отверстия 13 в направляющем пазу и подпружинена пружиной 23. Пружина 23 постоянно удерживает лопатку 19 в контакте с поверхностью ротора 15. Ширина лопатки 19 равна ширине ротора 15. Торцевые стенки 24 камер 14 гидронасоса стыкуются через уплотнения. Комплект камер 14 и торцевых стенок 24 стягивается в единое целое планкой 25, шпильками 26, гайками 27.
Внутри вала 16 и роторов 15 проходит канал 28, связывающий переливные канавки 20 с подпитывающей емкостью 29 рабочей жидкости, расположенной выше уровня роторов 15. Трубопроводы 9 направляют утечки в подпитывающую емкость 29.
Камеры 14 двухкамерного насоса установлены относительно друг друга в согласованное положение, при котором лопатка 19 одной камеры расположена на начале криволинейного участка 17, а другая лопатка 19 в это время расположена на конце криволинейного участка 17 своего ротора. Установку в согласованное положение производят разворотом камер 14 вокруг оси вращения главного вала 16.
Расчетный объем профильной полости 30 между стенкой камеры 14 и криволинейной поверхностью 17 выполнен с превышением объема жидкости, необходимого для перемещения поршня 3 со штоком 2 на требуемый ход ведомого звена. Величина превышения объема определяется объемом естественных утечек через зазоры подвижных соединений в гидроцилиндре и насосе и может составлять 3 - 5% от теоретического объема жидкости, необходимого для выполнения хода ведомого звена.
На случай неправильного расчета объема утечек и предохранения от работы "в упор" служит противопереполнительная (противоперегрузочная) канавка 18, через которую осуществляется переток излишнего объема жидкости, без снижения давления в полости гидроцилиндра ведомого звена.
На фиг. 1 приведен вариант однокамерного роторного гидронасоса с ротором, имеющим дроссельную щель в переливной канавке.
Конструкция привода с таким ведущим звеном удовлетворяет требованиям привода рабочего органа для большинства известных машин, так как может обеспечить синусоидальный закон изменения скорости рабочего органа, одинаковый в прямом и обратном направлениях.
По этому варианту камера 14 имеет два проходных отверстия 13, каждое из которых связана трубопроводом 12 с одной из полостей гидроцилиндра ведомого звена. Позади каждого отверстия, по ходу движения, установлена подпружиненная лопатка 19, причем лопатки расположены в одной диаметральной плоскости.
Конструкция насоса, приведенная на фиг. 4, является двухсекционной, состоящей из двух камер 14 и двух роторов 15, отличающихся друг от друга профилем и протяженностью криволинейных участков 17, протяженностью переливных канавок 20 и перемычек 21. Эта конструкция обеспечивает перемещение ведомого звена со скоростями, изменяющимися по заданному синусоидальному или отличающемуся от него закону, кроме того, закон движения ведомого звена в прямом направлении может отличаться от закона движения в обратном направлении.
На фиг. 3 приведена конструкция двухкамерного гидронасоса с двумя роторами, обеспечивающая более сложный цикл движения ведомого звена. Такая конструкция характерна для механизма переноса изделия в рабочую зону машины, когда захват должен немного отойти от изделия на время выполнения технологической операции в рабочей зоне, в которых за время одного цикла захват дважды идет в прямом направлении на разные расстояния и дважды в обратном направлении на разные расстояния.
Поэтому на роторе 15 выполнены по два криволинейных участка 17 разной протяженности, каждый из участков имеет свою противоперегрузочную канавку 18, а на цилиндрических участках выполнены две переливные канавки 20, каждая из которых имеет перемычку 21 с дроссельной щелью 22, и связана со своим криволинейным участком и с подпитывающей емкостью 29 каналом 28.
На фиг 5 - 8 приведены конструкции насосов для механизмов, осуществляющих такие же циклы движения ведомого звена как механизмы по фиг. 1 - 4, но в них роторы 15 на переливной канавке 20 не имеют перемычки с дроссельной щелью, а задача стабилизации движения ведомого звена в период торможения решается тем, что в теле лопаток 19 выполнен канал 31 - фиг. 6 и 7, или в корпусе камеры 14 отверстие 32 - фиг. 8, подводящие жидкости из полости переливной канавки 20 к другому концу лопаток 19, а на трубопроводе 33, соединяющем переливные канавки роторов с подпитывающей емкостью 29, установлен обратный клапан 34.
Такая конструкция в отличие от гидропривода аналога, не дает жидкости, вытесняемой из гидроцилиндра через переливную канавку 20, вытекать ни в сторону подпитывающей емкости через обратный клапан, ни в профильную полость 30 под лопаткой 19, поскольку любое высокое давление жидкости, развиваемое в переливной канавке со стороны инерционно двигающегося ведомого звена, не может отжать гидравлически уравновешенную сверху лопатку от ротора и пропустить жидкость в профильную полость.
Запирание жидкости в переливной канавке обратным клапаном 34 и лопаткой 19 создает гидравлический упор в гидроцилиндре для инерционно двигающегося ведомого звена. Этот гидравлический упор будет механически перемещаться на величину объема жидкости высвобождаемого в профильной полости 30 при движении ротора 15.
Поскольку высвобождаемые объемы точно соответствуют расчетным величинам, определяемым профилем полости 39 в соответствии с заданным законом движения ведомого звена, то из этого следует, что постоянный гидравлический упор обеспечит заданную скорость движения ведомого звена в период торможения.
На фиг. 8 показан однокамерный насос с одним ротором для гидропривода механизма, работающего с передаточным отношением
На роторе 15 имеются две одинаковые криволинейные поверхности 17 и две переливные канавки 20, расположенные на поверхности ротора через 180o. Это дает возможность за один оборот ротора насоса, связанному с ним гидроцилиндру ведомого звена, выполнить два одинаковых цикла движения.
Для механизмов машины, работающих с передаточным отношением, равным трем, на поверхности ротора выполняют три равнорасположенных криволинейных участка 17 со своими переливными канавками 20.
Фиг. 5 - 8 показывают конструктивное обеспечение согласованного взаимодействия отдельных ведомых звеньев автоматизированной машины с гидропередачей между собой.
На главном валу 16 расположены роторы насосов I, II, III, установленные в неизменное положение на шпонках, имеющие каналы или отверстия для прохода жидкости в переливные канавки роторов.
Главный вал 16 имеет центральный канал 28 для подвода жидкости к роторам. К насосу 1 пристыкована камера 35, к которой трубопроводом 33 через обратный клапан 34 подводится жидкость из подпитывающей емкости 29 или от отдельного подпитывающего насоса.
Камеры 14 насосов с расположенными в них подпружиненными лопатками 19 и неподвижными стенками 24 установлены с углами α1, α2, α3 относительно исходной позиции, имеют возможность поворота вокруг оси вала на любой угол с фиксированием в заданном положении за счет сил трения с помощью планки 25 шпилек 26 и гаек 27.
Согласование работы ведомых звеньев машины производят при сборке установкой камер 14 на определенный угол α согласно циклограммы работы механизмов, точно так же, как устанавливаются эксцентрики на главном валу механических швейных машин и автоматов с кулачковым приводом механизмом, а окончательная наладка производится корректировкой этих углов, как при сборке существующих машин.
Сравнительный показ сечений трех насосов на фиг. 5, 7 и 8 для одного положения главного вала дает понятие того, что начала движения каждого ведомого звена происходит после подхода к подпружиненной лопатке начальной кромки криволинейной поверхности 17 ротора, т.е. после поворота главного вала на угол α, определенный циклограммой для конкретного ведомого звена и обеспечивается разворотом камеры, что просто выполняется на практике.
Все описанные разновидности гидронасосов могут работать без каких-либо конструктивных изменений в сочетании с гидроцилиндром поворотного действия (гидроцилиндры с лопастью), что необходимо для приводов, в которых ведомое звено имеет поворотно-качательное движение.
Предлагаемый привод механизма автоматизированной машины фиг. 1 работает при заполнении всех полостей механизма и трубопроводов рабочей жидкостью, например минеральным маслом И-8А ГОСТ 20799-75.
При вращении главного вала 16 в направлении стрелки, ведущий ротор 15 перемещается относительно лопатки 19, которая постоянно поджата пружиной 23 к его периферийной поверхности. При этом объем жидкости, расположенной в профильной полости 30, при проходе под лопаткой криволинейного участка 17 ротора, вытесняется через проходное отверстие 13 по трубопроводу 12 в связанную с ним полость гидроцилиндра ведомого звена с частичным расходом жидкости через неуплотняемые зазоры гидроцилиндра и лопатки 19, перемещая поршень со штоком 2 ведомого звена в соответствующем направлении.
Одновременно жидкость из другой полости гидроцилиндра поршнем 3 выталкивается через отверстие 11, трубопровод 12 и другое проходное отверстие 13 камеры в полость переливной канавки 20 ротора, поскольку в это время вторая лопатка 19 скользит по цилиндрической части ротора над канавкой 20.
Из переливной канавки 20 в месте ее соединения с криволинейной поверхностью 17 ротора жидкость перетекает под давлением, развиваемым поршнем 3, в высвобождаемой за лопаткой 19 пространство профильной полости 30, заполняя ее вытесняемым из гидроцилиндра объемом жидкости, с одновременным пополнением утечек жидкости из подпитывающей емкости 29 через канал 28.
В начале хода, при разгоне ведомого звена, проходимое отверстие 13, сообщающееся с переливной канавкой, имеет свободный, только с противодавлением со стороны подпитывающей емкости, слив в открытую канавку жидкости, а скорость ведомого звена определяется объемами жидкости, подаваемой в гидроцилиндр.
После достижения ведущим звеном максимальной рабочей скорости и начала торможения к проходному отверстию 13 подходит перекрывающая перемычка 21 сливной канавки с дроссельной щелью 22, за счет расчетного сечения которой проводится регулировка скорости торможения ведомого звена со стороны слива.
В варианте гидропривода с обратным клапаном по фиг. 5 - 8, в которых на роторе 15 насоса сливная канавка не имеет перекрывающей перемычки, слив из гидроцилиндра, в связи с закрытостью полости переливной канавки обратным клапаном, происходит только в объемах, высвобождаемый в профильной полости 30 за лопаткой при движении ротора.
Поскольку высвобождаемые в полости 30 объемы точно равны объемам жидкости, вытесняемой в гидроцилиндр, обеспечивается соблюдение заданного закона движения и в период торможения ведомого звена.
В дальнейшем, при подходе к лопатке 19 конечной части криволинейного участка 17, шток 2, связанный с рабочим ведомым звеном, с минимальной скоростью приходит в крайнее переднее или заднее положение, в котором выступ 4 начинает входить в расточку 6, в которой создается гидравлическая подушка, гасящая скорость штока 2 и предотвращающая жесткое соударение поршня 3 с крышкой 5.
При этом случайные излишние объемы жидкости, возникающие из-за изменения скоростного режима работы и засоряемости зазоров в местах скольжения штока 2 и лопатки 19, переходят в канавке 18 из напорной полости за лопатку, предотвращая работу подвижных частей "в упор".
При переходе лопатки 19 с криволинейного участка 17 на цилиндрическую часть, другая лопатка 19 сходит с цилиндрической части ротора 15 на криволинейный участок 17, вследствие чего начинается противоположное перемещение жидкости в трубопроводах и полостях гидроцилиндра ведомого звена - рабочий орган совершает обратный ход и цикл работы механизма заканчивается.
Во время работы при вращении главного вала 16 с постоянной угловой скоростью, из профильной полости 30 за равные промежутки времени вытесняются неодинаковые объемы жидкости, что ведет к неравномерной скорости перемещения штока 2, определяемой профилем криволинейного участка 17, рассчитанного на основании требуемого закона движения ведомого звена.
Аналогично происходит работа механизма и движение жидкости в двухкамерных гидронасосах по фиг. 3 и 4, после того, как будут точно установлены относительно друг друга камеры 14 насоса, в положение, при котором лопатка 19 одной камеры стоит на начале криволинейного участка 17 ротора, а лопатка 19 второй камеры располагается, при этом, на конце криволинейного участка 17 своего ротора.
После этого перетекание и распределение жидкости в двух камерах и роторах насоса происходит в противофазе.
Закономерной особенностью насоса является то, что протяженность криволинейного участка 17 одного ротора равна протяженности переливной канавки 20 другого ротора.
В механизме швейной машины с однокамерным гидронасосом типа, показанного на фиг. 8, лопатки 19 установлены в корпусе камеры под углом 90 град. относительно друг друга и работа всех частей, перетекание и распределение жидкости в полостях насоса аналогично процессу работы привода механизма фиг. 1, но цикл работы механизма осуществляется за половину оборота главного вала 16.
Предложенное устройство привода механизма автоматизированных машин предназначено для использования в легкой и пищевой промышленности, в оборудовании производственного назначения.
Технический результат в предложенном устройстве достигается тем, что исключены сбои при использовании запрограммированного цикла движения ведомого рабочего звена, так как устранен инерционный проскок ведомого звена с неконтролируемой скоростью на тормозном участке пути.
Предложенное устройство возможно осуществить с помощью известных методов.
| название | год | авторы | номер документа |
|---|---|---|---|
| ГИДРОПРИВОД МЕХАНИЗМА ШВЕЙНОЙ МАШИНЫ | 1993 |
|
RU2074915C1 |
| ПНЕВМОПРИВОД МЕХАНИЗМА АВТОМАТИЗИРОВАННОЙ МАШИНЫ | 1998 |
|
RU2140029C1 |
| ПНЕВМОПРИВОД МЕХАНИЗМА ШВЕЙНОЙ МАШИНЫ | 2000 |
|
RU2190711C2 |
| МЕХАНИЗМ АВТОМАТИЧЕСКОГО СТРЕЛКОВОГО ОРУЖИЯ | 2002 |
|
RU2251650C2 |
| ДВИГАТЕЛЬ ВНУТРЕННЕГО СГОРАНИЯ ИЗМЕНЯЕМОЙ ТАКТНОСТИ | 1994 |
|
RU2090767C1 |
| ГИДРОМЕХАНИЧЕСКОЕ СЛЕДЯЩЕЕ УСТРОЙСТВО СЕЛЬСКОХОЗЯЙСТВЕННОЙ МАШИНЫ | 2007 |
|
RU2372216C2 |
| ГИДРОМОТОР КИРМАК | 2008 |
|
RU2405968C2 |
| Машина для рытья траншей | 1979 |
|
SU829825A1 |
| Система приводов трактора | 1987 |
|
SU1418086A1 |
| РОТОРНО-ПОРШНЕВОЙ НАСОС-КОМПРЕССОР | 1993 |
|
RU2096662C1 |


Изобретение относится к производству машин и оборудования с автоматическим циклом работы, например расфасовочные автоматы, автоматы изготовления укупорки, швейные машины, конкретно к гидроприводу отдельного механизма автоматизированной машины, в котором ведущим звеном является одно- или двухсекционный роторный гидронасос. Ротор гидронасоса жестко соединен с главным валом машины. На роторе выполнена криволинейная поверхность переменного радиуса, изменяющегося по заданному закону изменения скорости ведомого рабочего звена, образующая между стенками камеры и ротором напорную рабочую полость переменного сечения. В направляющем пазу стенки камеры установлены одна для двухсекционной камеры или две для односекционной камеры подпружиненные лопатки, перемещающиеся в направлении к криволинейной поверхности с возможностью перекрытия сечения напорной рабочей полости. На поверхности ротора выполнена одна или две переливные распределительные канавки, сообщающиеся каналом с подпитывающей емкостью и имеющие местную перемычку с дросселирующей щелью переменного расчетного сечения. На криволинейной поверхности ротора выполнена противоперегрузочная канавка шириной меньше ширины лопатки. Устройство гидропривода предотвращает сбои при исполнении запрограммированного цикла движения ведомого рабочего звена, устраняет инерционный проскок ведомого звена с неконтролируемой скоростью на тормозном участке пути. 2 с. ф-лы, 8 ил.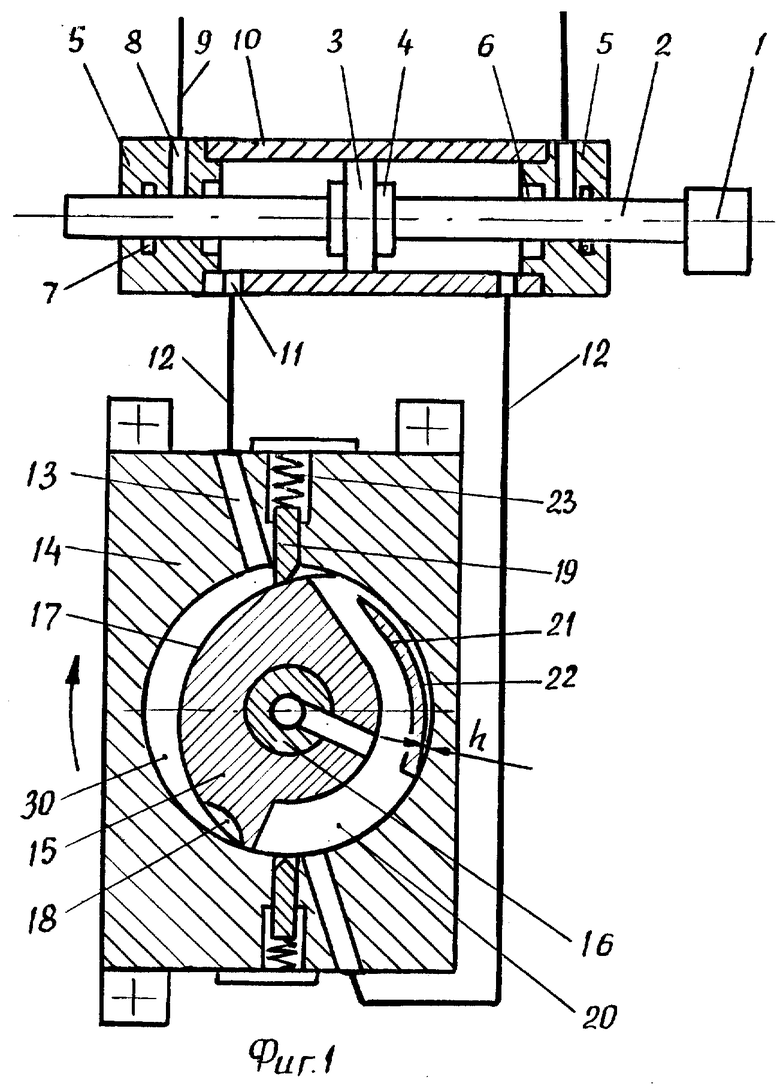
| ГИДРОПРИВОД МЕХАНИЗМА ШВЕЙНОЙ МАШИНЫ | 1993 |
|
RU2074915C1 |
| Гидравлический привод механизма перемещения материала в швейном полуавтомате | 1980 |
|
SU922207A1 |
| СССРПриоритет —Оп\-б,-1и;-:о;1а:;о 25.ХИ.1972, Бюллетень ЛЬ 4 за !97S! УДК 6S7.053.534I(OS8.8) | 0 |
|
SU363766A1 |
| US 4690081 A, 01.09.87 | |||
| DE 1550980 A1, 10.05.73 | |||
| ГИДРАВЛИЧЕСКАЯ СИСТЕМА УПРАВЛЕНИЯ ФОРМООБРАЗУЮЩИМИ УСТРОЙСТВАМИ УБОРОЧНЫХМАШИН | 0 |
|
SU211187A1 |
