Изобретение относится к системе для управления управляющих стержней, которые являются вводимыми в активную зону и выводимыми из активной зоны атомной энергетической установки, в частности с кипящим реактором, которая имеет устройства выбора и устройство управления стержней, причем устройство выбора содержит предназначенные для регулирования атомной энергетической установки и выбираемые последовательности действий, то есть координацию и последовательность движения управляющих стержней для каждого задаваемого управляющего воздействия и в соответствии с затребованной последовательностью действий передает сигналы выбора на устройство управления стержней. Изобретение относится далее к способу для управления управляющих стержней.
Регулирование мощности атомной электростанции атомной энергетической установки происходит, как правило, через управляющие стержни, которые вводятся в активную зону реактора или соответственно выводятся из активной зоны реактора атомной энергетической установки. Управляющие стержни для этого распределены по поперечному сечению активной зоны реактора и содержат поглощающий нейтроны материал, с помощью которого обеспечивается контролирование ядерной цепной реакции. Путем контролирования и регулирования ядерной цепной реакции происходит соответствующее регулирование тепловой мощности атомной энергетической установки. Для достижения возможно точного и равномерного регулирования тепловой мощности с учетом надежности реактора, в частности, исключения локальных перегревов и т.д., управляющие стержни объединяют в группы, как это описано, например, в US-PS 4,717,528. Группы перемещают несколькими следующими друг за другом, заранее установленными или актуально определенными шагами. Объединение управляющих стержней в группы и задание движений соответствующих групп обозначают как последовательности действий. Например, при вводе в действие атомной энергетической установки, то есть до начала ядерной цепной реакции до достижения полной мощности электростанции могут производиться до свыше 200 последовательностей действий. Для выполнения последовательностей действий предусмотрено устройство выбора, которое обозначено так же, как вычислительная машина движения управляющих стержней, которая передает соответствующие сигналы выбора на устройство управления стержней. При одновременном наличии команды действий, которая передается от регулирования электростанции или соответственно обслуживающего персонала на устройство управления стержней, а также сигнала разрешения (деблокирования), сигналы выбора передаются на привод управляющих стержней и управляющие стержни движутся в соответствии с заданием актуальной последовательности действий. Патент US-PS 4,717,528 рассматривает систему для управления и привода управляющих стержней атомной энергетической установки, охлаждаемой водой под давлением. Система содержит главную вычислительную машину, которая выполнена из пяти подчиненных вычислительных машин. Главная вычислительная машина служит для того, чтобы на основе физических условий в баке реактора атомной энергетической установки, охлаждаемой водой под давлением, как выгорание тепловыделяющих элементов, местные плотности потока нейтронов и локальная мощность, определять выгодный для работы атомной энергетической установки образец перемещения управляющих стержней. Этот выгодный образец перемещения управляющих стержней каждый раз определяется заново по времени. Главная вычислительная машина соединена через систему шин (Control Rod Logic Bus Controller) с соответствующими приводными устройствами управляющих стержней. Через систему шин с помощью вычисленного главной вычислительной машиной выгодного распределения управляющих стержней для управления соответствующего приводного устройства передается соответствующий электрический сигнал. Соответствующее приводное устройство содержит различные электрические удерживающие катушки, с одной стороны, для фиксации и, с другой стороны, для перемещения управляющих стержней, причем электрические удерживающие катушки размещены в корпусе. Приводное устройство, а также передача электрических сигналов могут выполняться с резервированием. Для резервирования и надежности передачи сигнала предусмотрена так называемая шина безопасности.
Устройство выбора для управления управляющих стержней наряду с рабочими функциями может также иметь значение для техники безопасности, так как оно, с одной стороны, может быть ответственным как возможная причина недопустимых нарушений распределения мощности и уровня мощности в активной зоне реактора при неправильном функционировании и, с другой стороны, служит в качестве системы для снижения мощности при эксплуатационных неисправностях (система быстрого отключения). Рабочие функции могут быть подразделены на три в значительной степени независимые области задач, а именно выбор и отмена выбора управляющих стержней согласно задаваемой последовательности действий по требованию регулирования реактора и/или обслуживающего персонала. Сюда относится также контроль положения стержня относительно совпадения с актуальной последовательностью действий. Другая рабочая функция может заключаться в возможно непрерывном контроле правильного функционирования (самоконтроль), а также работоспособности периферийных устройств, например устройств ввода и вывода сигнала, измерительных устройств для определения положения управляющих стержней. При распознавании ошибки может происходить автоматическое отделение устройства выбора, то есть вычислительной машины движения управляющих стержней, от процесса регулирования мощности. Возможно ошибочные сигналы выбора таким образом становятся неэффективными в устройстве управления стержней. Эту неэффективность сигналов выбора при наступающих нарушениях обозначают как Fail-Safe-поведение. В качестве третьей функции устройства выбора часто учитывают протоколирование сообщений из приводной системы управляющих стержней, в частности протоколирование времен введения каждого стержня при быстром отключении атомной энергетической установки, в частности с кипящим реактором. Контроль времен введения требует оценки большого числа сигналов, которые требуются частично для выбора и отмены выбора управляющих стержней так, что эти контрольные функции могли бы быть взятыми на себя устройством выбора.
Задачей изобретения является указание системы для управления управляющих стержней, в которой рабочие функции выполняются отдельными друг от друга и различными устройствами, причем, в частности, контроль правильного функционирования устройства выбора должен происходить в основном независимо от его центрального процессорного блока.
Согласно изобретению эта задача решается системой для управления управляющих стержней, которые являются вводимыми в активную зону реактора и выводимыми из активной зоны реактора атомной энергетической установки, с устройством выбора, устройством контроля и устройством управления управляющих стержней за счет того, что
a) устройство выбора содержит определенные для регулирования атомной энергетической установки и отдельно выбираемые последовательности действий, то есть координацию и последовательность движения управляющих стержней для каждого заданного управляющего воздействия и соединено с устройством управления стержней для передачи сигналов выбора, которые приданы в соответствие выбранной последовательности действий,
b) устройство контроля с учетом приданных в соответствие соответствующей последовательности движений структурных признаков активной зоны реактора и управляющих стержней контролирует сигналы выбора на допустимость и при допустимости передает сигнал разрешения на устройство управления стержней и
с) устройство управления стержней при наличии сигнала разрешения вызывает перемещение управляющих стержней в соответствии с сигналами выбора.
За счет этого обеспечен выбор и отмена выбора управляющих стержней согласно заранее задаваемой или заранее определяемой последовательности действий по требованию регулирования реактора или обслуживающего персонала. Более того, только при наличии сигнала разрешения сигналы выбора становятся активными в устройстве управления стержней так, что также обеспечивается Fail- Safe-поведение. При замене вычислительной машины движения управляющих стержней без отдельного устройства контроля не требуются никакие или только в незначительном объеме изменения в приданных системах, как устройство управления стержней и щит управления электростанции так, что также обслуживание обслуживающим персоналом остается в основном неизменным. Потребность в площади соответствующей изобретению системы является такой же большой или даже меньше, причем кроме того имеется более высокая готовность. Контроль времени введения управляющих стержней в случае быстрого отключения может просто производиться отдельным устройством. Изобретением обеспечивается полностью новым и отличным образом то, что при ошибочном функционировании устройства выбора возможно ошибочные сигналы выбора в устройстве управления стержней остаются не активными, таким образом гарантируется Fail- Safe-поведение. Имевшаяся ранее вычислительная машина движения управляющих стержней может быть заменена в ходе переоснащения устройством выбора, которое в основном имеет рабочую функциональность и существенные признаки выполнения техники безопасности прежней вычислительной машины движения управляющих стержней, в частности самоконтроль, а также отличающимся устройством контроля. Устройство контроля контролирует сигналы выбора устройства выбора на совпадение с алгоритмом контроля и требованиями из процесса регулирования мощности. Оно выдает при совпадении динамический сигнал разрешения или в другом случае блокирует путем запирания сигнала разрешения становление активными сигналов выбора в устройстве управления стержней. При этом учитывается, что правильными и следовательно допустимыми сигналами выбора стержней считаются по определению такие сигналы выбора, также кратко называемые выборами, которые выполняются при имеющемся требовании регулирования электростанции или соответственно обслуживающего персонала согласно заданной последовательности действий. Чтобы надежно избежать недопустимых выборов, так называемых ложных выборов, которые являются существенными с точки зрения техники безопасности, и приводят, в частности, при перемещении управляющих стержней к недопустимым нагрузкам находящихся в активной зоне реактора тепловыделяющих элементов, не обязательно требуется распознавать любое незначительное отклонение движения управляющих стержней от заданной последовательности действий. Более того, устройство контроля должно обеспечивать, чтобы не становились активными никакие существенные с точки зрения техники безопасности ошибочные выборы. За счет отличающегося от выбора контроля поэтому проверяется не абсолютное совпадение выбора с последовательностью действий, а скорее соблюдение свойств последовательности действий. Одно свойство реальной последовательности действий лежит в ее структуре, которая опять-таки должна иметь физический смысл. Выводимыми из структуры структурными признаками являются прежде всего соседние связи выбранных управляющих стержней, следствия соседних связей, а также временные условия. Чем больше структурных признаков вовлечено в контроль и чем более комплексными являются критерии контроля, тем более эффективным является контроль. При вводе новой последовательности действий в устройство выбора комплект структурных признаков соответствующей последовательности действий может передаваться от устройства выбора к устройству контроля. В устройстве контроля происходит контроль сигналов выбора для управляющих стержней на соблюдение этих структурных признаков, а также других признаков. При соблюдении заданных признаков динамический сигнал разрешения, который, например, генерируется циклически, передают на устройство управления стержней. При распознавании ошибки сигнал разрешения запирается, что приводит к блокированию сигналов выбора в устройстве управления стержней.
Устройство выбора с эксплуатационными функциями вычислительной машины движения управляющих стержней для выбора управляющих стержней и устройство контроля действуют различно друг от друга, так как для обоих существует различный технологический подход с различными входными сигналами, различными выходными сигналами и программными структурами. Например, устройство выбора получает аналоговые входные сигналы, которые характеризуют положение стержня, и оно выдает статические выходные сигналы на устройство управления стержней, которые приложены во время движения управляющих стержней вплоть до заданного положения стержня. В качестве величин сравнения для этого служат заданные последовательности действий. Программная структура служит для сравнения входных сигналов с заданной последовательностью действий. В противоположность этому устройство контроля получает, например, двоичные входные сигналы, в частности сигналы выбора и/или сигналы структурных признаков последовательности действий, в частности, от устройства выбора или устройства управления стержней. В качестве выходного сигнала передается динамический, в частности циклически генерируемый, сигнал разрешения. В качестве величин сравнения служит структура последовательности действий, а не сама последовательность действий. Программная структура поэтому рассчитана на сравнение структурных признаков последовательности действий. Различный контроль сигналов выбора посредством контроля структурных свойств последовательностей действий, то есть активной зоны реактора и управляющих стержней, кроме определения ошибочных функций устройства выбора является также пригодным для распознавания последствий ошибок в заданной последовательности действий.
Дополнительное различие может получаться путем использования различных операционных систем, различных языков программирования, различных компайлеров/ассемблеров, различных системных структур машинного обеспечения и различных приборов. Для этого пригодны, в частности, различные системы техники управления с различными компонентами машинного и программного обеспечения. За счет различия устройства выбора и устройства контроля имеет место высокая с точки зрения техники безопасности надежность системы для управления управляющих стержней, которая может быть еще более повышена за счет применения различных компонентов машинного и программного обеспечения для устройства выбора и устройства контроля. Это справедливо, в частности, если исходить из предположения, что в компонентах машинного и программного обеспечения имеются только статистические ошибки или соответственно систематические ошибки оказывают не одновременное, а статистическое воздействие.
Предпочтительно устройство выбора, вычислительная машина движения управляющих стержней и/или устройство контроля содержит по меньшей мере два резервированных процессора, которые рассчитаны для выполнения тех же задач. При этом активным является только один из резервированных процессоров в смысле, что только этот активный процессор (Master-процессор) производит полную обработку данных согласно своей задаче и направляет дальше результат обработки данных. Другой процессор (резервный процессор) является или полностью неактивным или блокирован так, что дальше обрабатываются только сигналы активного процессора. В случае ошибочного функционирования активного процессора, которое, например, узнается за счет самоконтроля, этот процессор дезактивируется и при этом активируется резервный процессор. Он принимает на себя необходимую обработку данных. Этот принцип резервирования обозначается как Master-Reserve-принцип, причем активным является главный (Master-) процессор и резервный (Reserve-) процессор имеется в распоряжении как замена, если главный процессор функционирует ошибочно или вообще выходит из строя. Master-Reserve-принцип для устройства выбора и/или устройства контроля является особенно предпочтительным, когда соответствующее устройство выполнено в виде одноканальной системы с одним входным каналом и одним выходным каналом. В применяемых до сих пор устройствах выбора, так называемых вычислительных машинах движения управляющих стержней, оказалось, что для их готовности решающей является не надежность машинного обеспечения или программного обеспечения, а чувствительность алгоритмов контроля и надежность вовлеченных в контроль периферийных устройств, в частности измерительного устройства для положения управляющего стержня, а также приводы управляющих стержней, включая относящиеся к ним электрические компоненты и компоненты техники управления. Поэтому резервированное выполнение процессоров предпочтительно состоит из главного (Master-) процессора и резервного (Reserve-) процессора. Повышение готовности может быть достигнуто за счет применения более надежных периферийных приборов, а также резервированного выполнения периферийных устройств. Ввод характеризующих положение стержней сигналов происходит, например, через мультиплексоры, блоки вывода/ввода или связь с уже имеющейся со стороны установки системой передачи данных.
Направленная на способ управления управляющих стержней, которые являются вводимыми в активную зону и выводимыми из активной зоны атомной энергетической установки, задача решается тем, что
a) последовательность движения и координация управляющих стержней объединены в последовательности действий и запомнены в устройстве выбора и являются доступными для выбора и приданные выбранной последовательности действий сигналы выбора передают от устройства выбора к устройству управления стержней,
b) сигналы выбора также передают к отличающемуся от устройства выбора устройству контроля и с помощью приданных последовательности действий структурных признаков проверяют на допустимость,
c) при допустимости сигналов выбора передают сигнал разрешения на устройство управления стержней и
d) при одновременном приложении сигналов выбора и сигнала разрешения на устройстве управления стержней производят перемещение управляющих стержней в соответствии с сигналами выбора.
За счет различности способа выбора и способа контроля обеспечивается высокая с точки зрения техники безопасности надежность и контроль становится возможным независимо от центрального процессорного блока устройства выбора. Способ может просто применяться в уже существующих атомных энергетических установках, в частности с кипящим реактором.
Система для управления управляющих стержней атомной энергетической установки, в частности атомной энергетической установки с кипящим реактором, а также способ для управления управляющих стержней поясняется более подробно на примерах выполнения с помощью чертежей, на которых показано:
Фиг. 1 - система для управления управляющих стержней в схематическом представлении с устройством выбора и отличающимся от него устройством контроля,
Фиг. 2 - система для управления управляющих стержней согласно уровню техники и
Фиг. 3 - система для управления управляющих стержней с резервированно выполненным устройством выбора и резервированно выполненным устройством контроля.
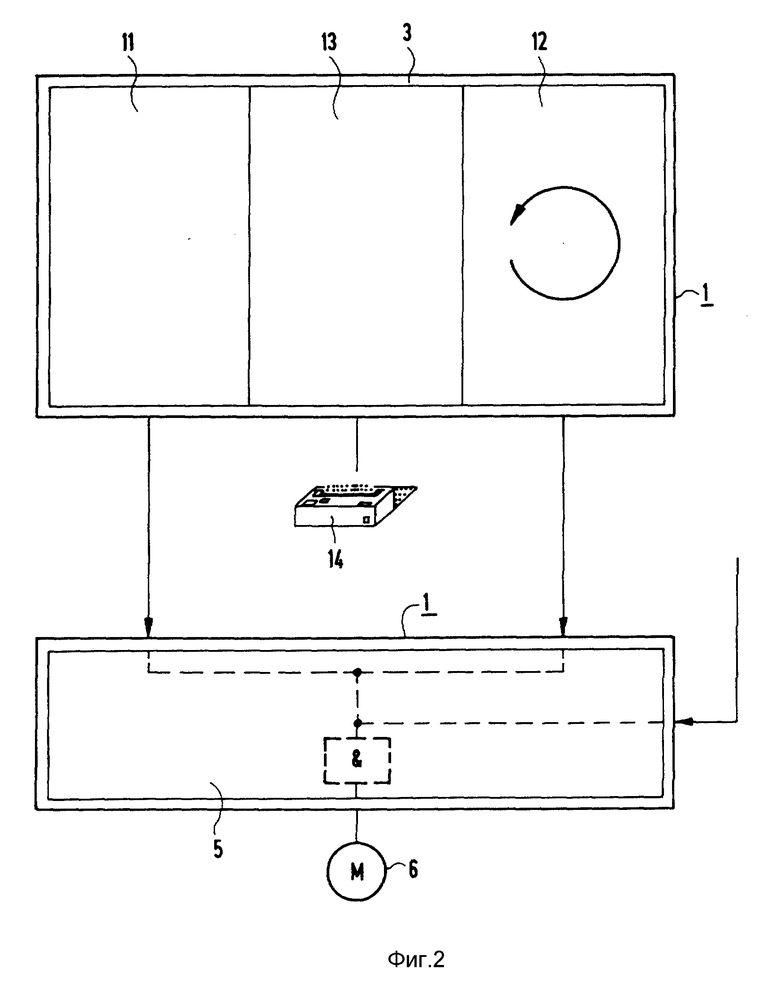
Схематически представленная на Фиг. 1 система 1 для управления управляющих стержней атомной энергетической установки содержит устройство выбора 3, устройство контроля 4 и устройство управления стержней 5. Устройство выбора 3 и устройство контроля 4 связаны как с устройством управления стержней 5, так и непосредственно друг с другом. Устройство выбора 3 далее соединено с измерительным устройством 15 для определения положения управляющих стержней. Устройство управления стержней 5 далее находится в соединении с системой регулирования реактора 16 и/или с не представленным здесь устройством ввода для обслуживающего персонала, а также с устройством установки стержней 6 для перемещения управляющих стержней. От системы регулирования реактора 16 устройство управления стержней 5 получает в зависимости от желательного изменения мощности атомной энергетической установки соответствующую команду действий для операций с управляющими стержнями. Для выполнения этой команды устройством выбора 3 дается соответствующая последовательность действий, то есть группа управляющих стержней с соответствующим значением изменения позиционирования управляющих стержней, на устройство управления стержней 5 в виде соответствующих статических сигналов выбора. Эти сигналы выбора приложены к устройству управления стержней 5 до достижения заданного положения управляющих стержней выбранной группы управляющих стержней. Для определения, в какой мере уже переместились выбранные управляющие стержни, к устройству выбора 3 через измерительное устройство 15 для определения положения управляющих стержней подводится сигнал, характеризующий положение управляющих стержней. Для обеспечения того, чтобы допустимые в соответствии с командой действия и приданной последовательности действий сигналы выбора выдавались на устройство управления стержней 5 и становились там активными, устройством выбора 3 на устройство контроля 4 передается комплект структурных признаков последовательности действий. На основе комплекта структурных признаков, который, в частности, содержит соседние связи выбранных управляющих стержней, временные последствия соседних связей, а также временные условия, проверяют допустимость сигналов выбора. В случае, если сигналы выбора оцениваются как допустимые, от устройства контроля 4 на устройство управления стержней 5 передается динамический сигнал разрешения. Если же сигналы выбора оцениваются как недопустимые, то сигнал разрешения блокируют и таким образом обеспечивают, что возможно ошибочные сигналы выбора от устройства управления стержней 5 не передаются на устройство установки стержней 6. Таким образом выдерживается Fail-Safe-принцип, при котором в случае появления ошибок атомная энергетическая установка остается в надежном состоянии. На основе технологического, приборно-технического и программно-технического различия между устройством выбора 3 и устройством контроля 4, а также различия созданных в устройствах 3, 4 сигналов, система 1 имеет высокую надежность с точки зрения техники безопасности.
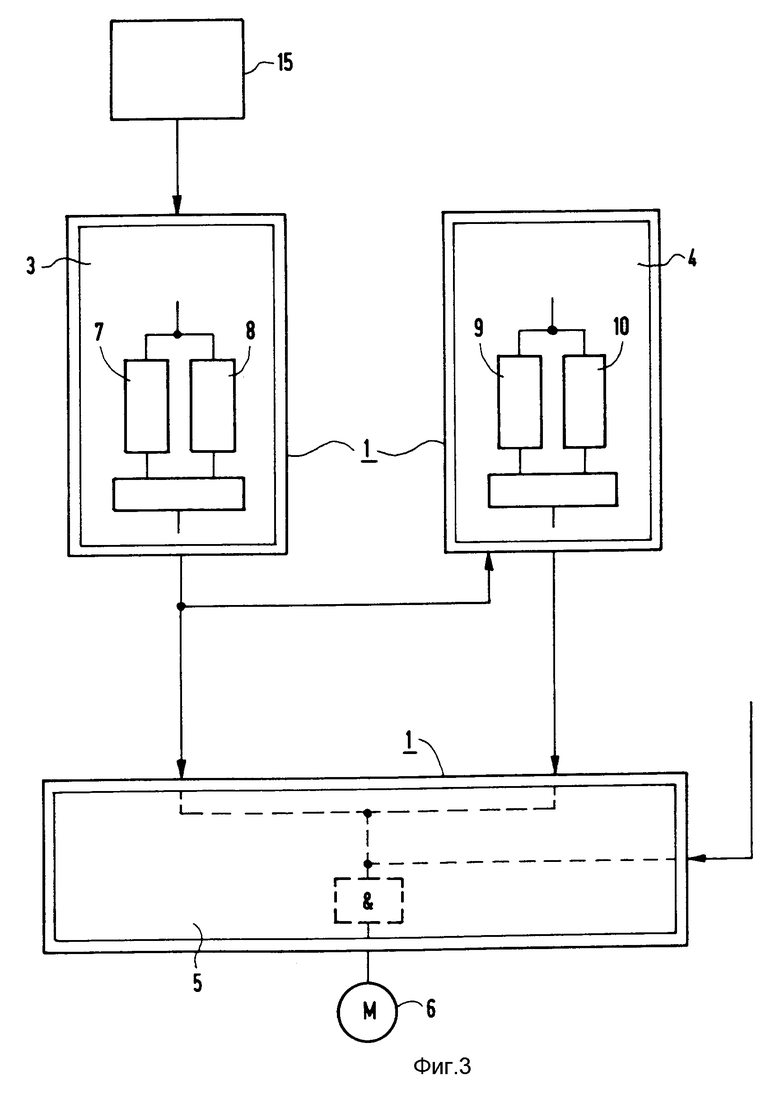
На Фиг. 2 представлена предшествующая система 1 для управления управляющих стержней атомной энергетической установки. От устройства выбора 3, которое также обозначено как вычислительная машина движения управляющих стержней, передаются как сигналы выбора необходимой последовательности действий, так и сигнал разрешения на устройство управления стержней 5. Вычислительная машина движения управляющих стержней 3 содержит модуль последовательностей действий 11, модуль самоконтроля 12, а также модуль контроля быстрого отключения 13. Модуль самоконтроля 12 выполняет функциональную проверку центрального процессорного блока модуля последовательностей действий 11. Модуль самоконтроля 12 поэтому специально рассчитан на этот центральный процессорный блок. При применении самых современных процессорных блоков для этого были бы необходимы экстремально сложные и требующие чрезвычайно высоких затрат специальные разработки, причем вероятно нельзя было бы привести справедливого в общем доказательства активности модуля самоконтроля 12 вследствие сложности современных процессорных блоков. За счет модуля самоконтроля 12 все последовательности действий и относящиеся к этому сигналы выбора проверяются на полное совпадение. Изобретением в противоположность этому такой сложный полный контроль избегается за счет того, что сигналы выбора контролируют на основе структурных признаков последовательностей действий и с надежностью определяют те сигналы выбора, которые являются недопустимыми и существенными с точки зрения техники безопасности.
Устройство выбора 3 согласно Фиг. 2 располагает, кроме того, также модулем контроля быстрого отключения 13, который подключен к устройству протоколирования 14, в частности печатающему устройству, которым в случае быстрого отключения протоколируют времена введения управляющих стержней в активную зону реактора, а также другие необходимые в этой связи сигналы.
На Фиг. 3 указана аналогичная Фиг. 1 система 1 для управления управляющих стержней. Одинаковые ссылочные позиции обозначают одинаковые объекты. Дополнительно к представленной на Фиг. 1 системе 1 как устройство выбора 3, так и устройство контроля 4 содержит каждое два взаимно резервированных процессора 7, 8 или соответственно 9, 10. К процессорам 7, 8 устройства выбора 3 соответственно приложены одинаковые входные сигналы, причем в нормальном случае, конечно, на устройство управления стержней 5 или соответственно устройство контроля 4 передаются только выходные сигналы главного процессора 7. Резервный процессор 8 в нормальном случае находится в режиме готовности. При ошибочном функционировании главного процессора 7, которое, например, распознается через программно-технически реализованный самоконтроль, главный процессор 7 дезактивируют и полностью активируют резервный процессор 8, так что соответствующие выходные сигналы на устройство управления стержней 5 или соответственно на устройство контроля 4 теперь передаются от резервного процессора 8. Главный процессор 9 и резервный процессор 10 устройства контроля 4 аналогично процессорам 7, 8 устройства выбора 3 выполнены резервированно. За счет различности устройства контроля 4 и устройства выбора 3, а также за счет их резервированного выполнения даже при одноканальном вводе и/или выводе устройства выбора 3 и устройства контроля 4 обеспечивается высокая надежность системы 1.
Изобретение отличается системой для управления управляющих стержней атомной энергетической установки, работающей на легкой воде, в частности, с реактором с кипящей водой, с устройством выбора, которое выбирает управляющие стержни и наряду с прежней эксплуатационной функциональностью имеет также существенные признаки разработки техники безопасности предыдущих устройств выбора, так называемых вычислительных машин движения управляющих стержней. Система имеет к тому же устройство контроля, которое контролирует согласно отличного от устройства выбора алгоритма сигналы выбора, которые передаются от устройства выбора на устройство управления стержней и препятствует становлению активными ошибочных выборов. За счет применения взаимно различных систем техники управления, а также резервированного выполнения устройства выбора и устройства контроля посредством двух независимых процессоров, можно еще больше повысить надежность системы. По сравнению с предыдущими системами в соответствующей изобретению системе контроль сигналов выбора определяется на основе структурных признаков последовательностей движения и координации управляющих стержней, за счет чего обеспечен быстрый и надежный, а также развязанный от центрального процессорного блока устройства выбора и различающийся контроль.
| название | год | авторы | номер документа |
|---|---|---|---|
| ОТВЕЧАЮЩАЯ СИСТЕМА ДЛЯ ОБРАБОТКИ СИГНАЛОВ И СПОСОБ ОПРЕДЕЛЕНИЯ МАКСИМАЛЬНОГО ВРЕМЕНИ ВЫПОЛНЕНИЯ ПРОЦЕССА АВТОМАТИЗАЦИИ ПОСРЕДСТВОМ ОТВЕЧАЮЩЕЙ СИСТЕМЫ | 1995 |
|
RU2150739C1 |
| УСТРОЙСТВО ДЛЯ СИГНАЛЬНО-ТЕХНИЧЕСКИ НАДЕЖНОГО УПРАВЛЕНИЯ И КОНТРОЛЯ ЭЛЕКТРИЧЕСКИХ ПОТРЕБИТЕЛЕЙ НА ЖЕЛЕЗНОДОРОЖНОМ ТРАНСПОРТЕ | 1997 |
|
RU2194646C2 |
| УПРАВЛЯЮЩАЯ СИСТЕМА БЕЗОПАСНОСТИ АТОМНОЙ ЭЛЕКТРОСТАНЦИИ | 2015 |
|
RU2598599C1 |
| СХЕМА ДЛЯ УПРАВЛЕНИЯ И КОНТРОЛЯ СТРЕЛОЧНЫХ ПРИВОДОВ | 1997 |
|
RU2194645C2 |
| КОМПЛЕКС РЕЗЕРВИРУЕМЫХ ПРОГРАММНО-АППАРАТНЫХ СРЕДСТВ АВТОМАТИЗАЦИИ КОНТРОЛЯ И УПРАВЛЕНИЯ | 2010 |
|
RU2430400C1 |
| СХЕМА ДЛЯ УСТАНОВКИ И КОНТРОЛЯ СВЕТОВЫХ СИГНАЛОВ | 1997 |
|
RU2185633C2 |
| СПОСОБ РЕГИСТРАЦИИ ПАДЕНИЯ РЕГУЛИРУЮЩЕГО ЭЛЕМЕНТА (ВАРИАНТЫ) И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1996 |
|
RU2168775C2 |
| УСТРОЙСТВО ФОРМИРОВАНИЯ ТАКТОВЫХ СИГНАЛОВ | 1990 |
|
RU2065661C1 |
| Резервированная система автоматического управления | 1982 |
|
SU1113778A1 |
| СПОСОБ ЭКСПЛУАТАЦИИ СХЕМЫ ДЛЯ ЦЕНТРАЛЬНО УПРАВЛЯЕМЫХ КОММУТАЦИОННЫХ УСТАНОВОК ДАЛЬНЕЙ СВЯЗИ | 1989 |
|
RU2115253C1 |
Изобретение относится к системе (1) для управления управляющими стержнями, которые являются вводимыми в активную зону реактора и выводимыми из активной зоны реактора атомной энергетической установки, с устройством выбора (3), устройством контроля (4) и устройством управления стержнями (5). Устройство выбора (3) содержит определенные для регулирования атомных энергетических установок и выбираемые последовательности действий, то есть координацию и последовательность движения управляющих стержней, и передает приданные каждой последовательности действий сигналы выбора на устройство управления стержней (5). Устройство выбора (3) и устройство контроля (4) являются технологически различными относительно друг друга так, что система (1) и способ обеспечивают высокую надежность в соответствии с требованиями безопасности в атомных энергетических установках. 2 с. и 4 з.п.ф-лы, 3 ил.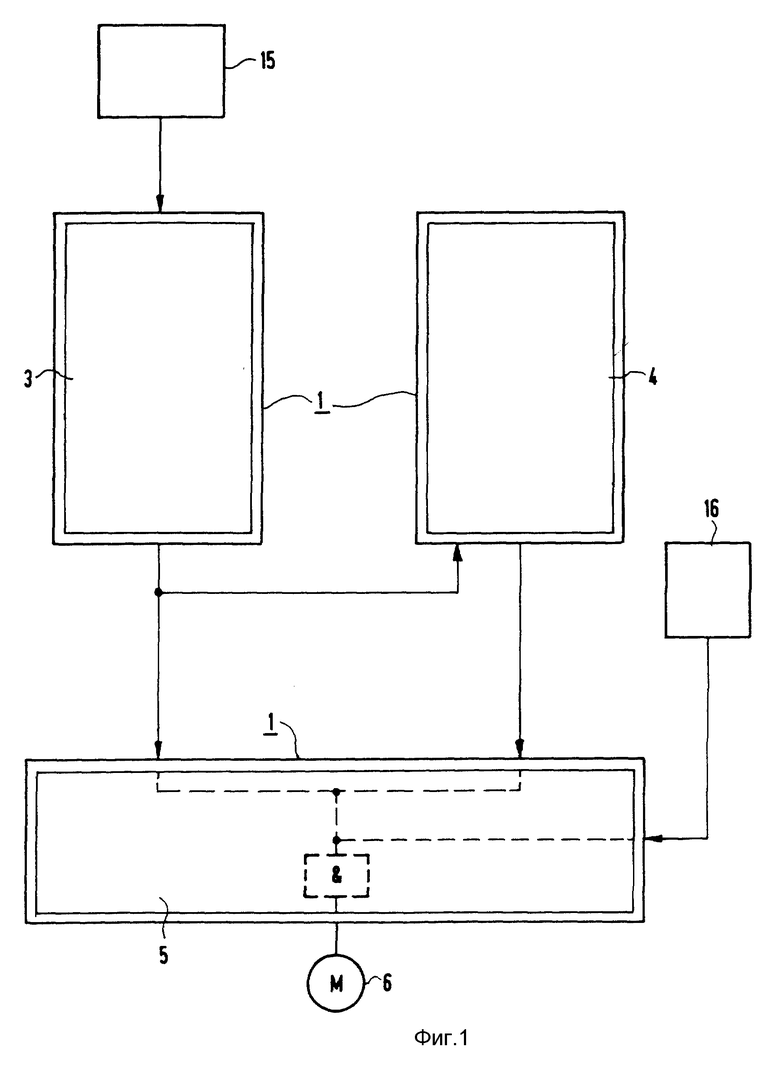
| US 4717528 A, 05.06.88 | |||
| Устройство для управления и защиты атомного реактора | 1991 |
|
SU1793477A1 |
| US 5217678 A, 08.06.93 | |||
| US 4877575 A, 31.10.89 | |||
| МЕХАНИЗМ ОТТЯЖКИ ТРИКОТАЖА НА КРУГЛОВЯЗАЛЬНОЙ МАШИНЕ | 0 |
|
SU326267A1 |
| Королев В.В | |||
| Системы управления и защиты АЭС | |||
| - М.: Энергоатомиздат, 1986, с.16-22. | |||

