Изобретение относится к автоматик в частности к системам управления с цифровыми вычислительными устройствами в контуре управления сложными объектами и техническими процессами.
Известны системы автоматического управления, с цифровыми управляющими вычислительными машинами, которые для обеспечения надежности резервированы регуляторами, построенными на основе более простых и надежных элементов. В случае отказа вычислительной машины такие системы обеспечиваю хотя с худшим качеством, управление от резервного регулятора. Управляющие сигналы вычислительной машины подаются как на исполнительный механизм, так и на. вход резервного регулятора, причем на вход регулятора подается такой сигнал, чтобы,его выходкой сигнал был равен сигналу на входе исполнительного механизма для обеспечения перехода управления с вычислительной машины на резервньй регулятор без скачкообразных возмущений l .
Недостаток устройства - дополнительная вычислительная нагрузка на вычислительную машину. Кроме того, при возникновении неконтролируемого отказа вычислительной машины (например , вследствие ошибки в математическом обеспечении) возможна вьщача недопустимого управляющего сигнала, приводящего к выходу регулируемого параметра за допустимые значения.
Наиболее близкой к предлагаемой является система автоматического .управления, содержащая датчик, управляющую вычислительную машину, анаЛОГОЕ1ЫЙ резервньш регулятор, задатчик, размыкающие и замыкающие контакты, блок переключателей, блок управления аналогового регулятора, исполнительный механизм и исполнительный орган. Блок переключателей соединенj с управляющей вычислительной машиной и аналоговьм регулятором. Вход обратной связи аналогового регулятора через размыкающие контакты соединен свыходом управляющей вычислительной машины, а через замыкающие контакты с блоком управления аналогового регулятсфа. Вход исполнительного механизма соединен через размыкающие контакты с аналоговым выходом управляющей вычислительной машины, а через замьйсающие контакты с выходом
блока управления аналогового регулятора. Датчик, преобразующий измеритель ную величину управляемого параметра Втоковьй сигнал, и задатчик соединены с управляющей вычислительной машиной и аналоговым регулятором 2l,
В известной системе автоматическое переключение с режима управления от управляющей вычислительной машины на аналоговый регулятор происходит не только при отказе управляющей вычислительной машины, но и при выходе регулируемого параметра за допустимые граничные значения.
Однако контроль параметра и формирование сигнала по его отклонениям возложены на вычислительную машину, при этом не контролируется сигнал с ее выхода. Такое техническое решение не обеспечивает надежность при возникновении ряда неконтролируемых отказов управляюш;ей вычислительной машины,связанных, например, с ошибками в программном обеспечении. Неконтролируемые отказы в управляющей вычислительной машине могут привести к вьщаче на исполнительный орган недопустимого управляющего воздействия или к отсутствию контроля управляемого параметра по выходу за допустимые пределы. Система практически не может применяться для управления потенциально опасными объектами, например энергетическими ядерными реакторами, так как допускает вьщачу такого управляющего сигнала, который может вывести регулируемый параметр за пределы регламентируемых значений и привести к катастрофическим последствиям.
Цель изобретения - повьш1ение надежности системы с вычислительным блоком в контуре управления путем обеспечения контроля величины и скорости изме|1ения управляющего сигнала, а также перехода на резервный регулятор без скачкообразного возмущения.
Поставленная цель достигается тем, что в резервированную систему управления, coдepжaщs o основной регулятор, первый информационный вход которого соединен с выходом задатчика, информационный выход - с первым входом элемента ИЛИ, а управляющий выход с первым входом блока переключателей, первый выход которого всоединен с первым входом исполнительного органа.
31
второй вход - с вторым выходом блока переключателей, второй вход которого соединен с выходом задатчика-, выход датчика соединен с вторым информационным входом основного регулятора, третьим входом резервного регулятора и входом блока пороговых элементов, выход которого соединен с вторьм входом элемента ИЛИ,выход которого соединен с управляющим входом блока переключателей, введены устройство контроля управляющего сигнала, блок перестройки структуры резервного регулятора, управляющий выход основного регулятора соединен с первым входом устройства контроля управляющего сигнала, второй вход которого соединен с выходом задатчика, а выхо с третьим входом элемента ИЛИ, вход блока перестройки структуры резервного регулятора соединен с вторым выходом резервного регулятора, а выход - с третьим входом блока переключателей, третий выход которого соединен с четвертым входом резервного регулятора.
Устройство контроля управляющего сигнала содержит фильтр, дифференцирующий усилитель, усилитель-инвертор, сумматор, первый и второй пороговые элементы,- причем первый вход устройства соединен последовательно через фильтр и дифференцирующий усилитель с входом первого порогового элемента и через сумматор с входом второго порогового элемента второй вход устройства через усилитель-инвертор соединен с вторым входом сумматора, выходы пороговых элементов соединены с выходом устройства.
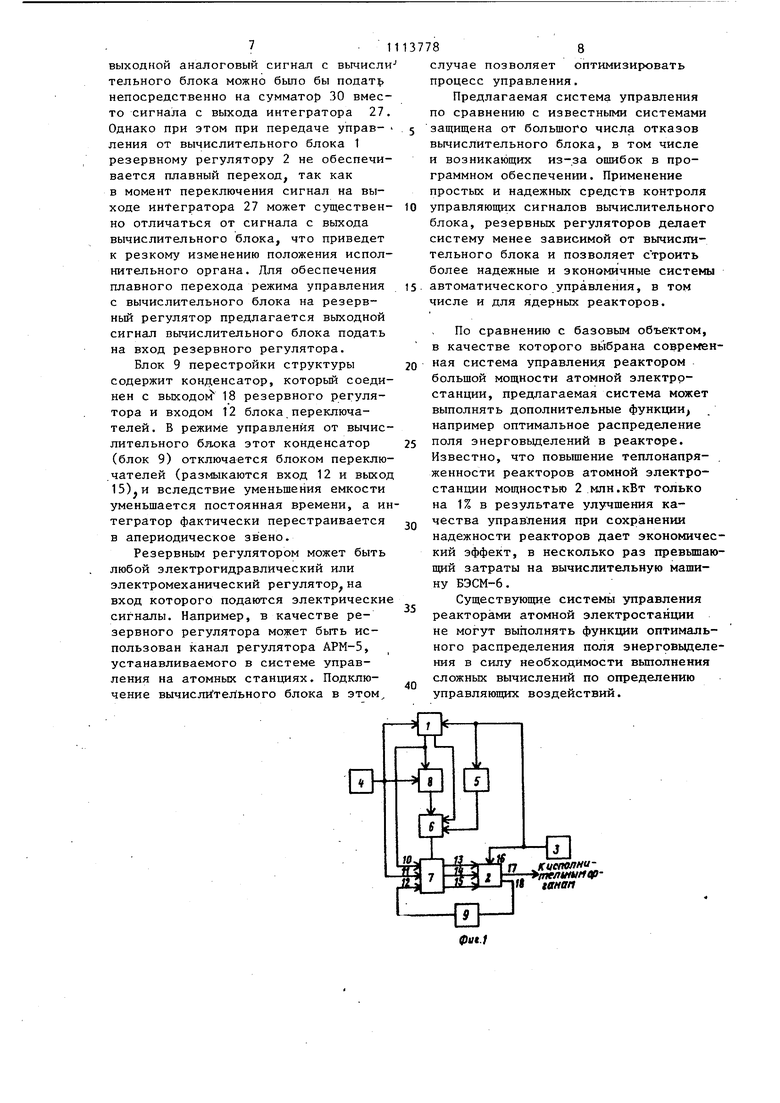
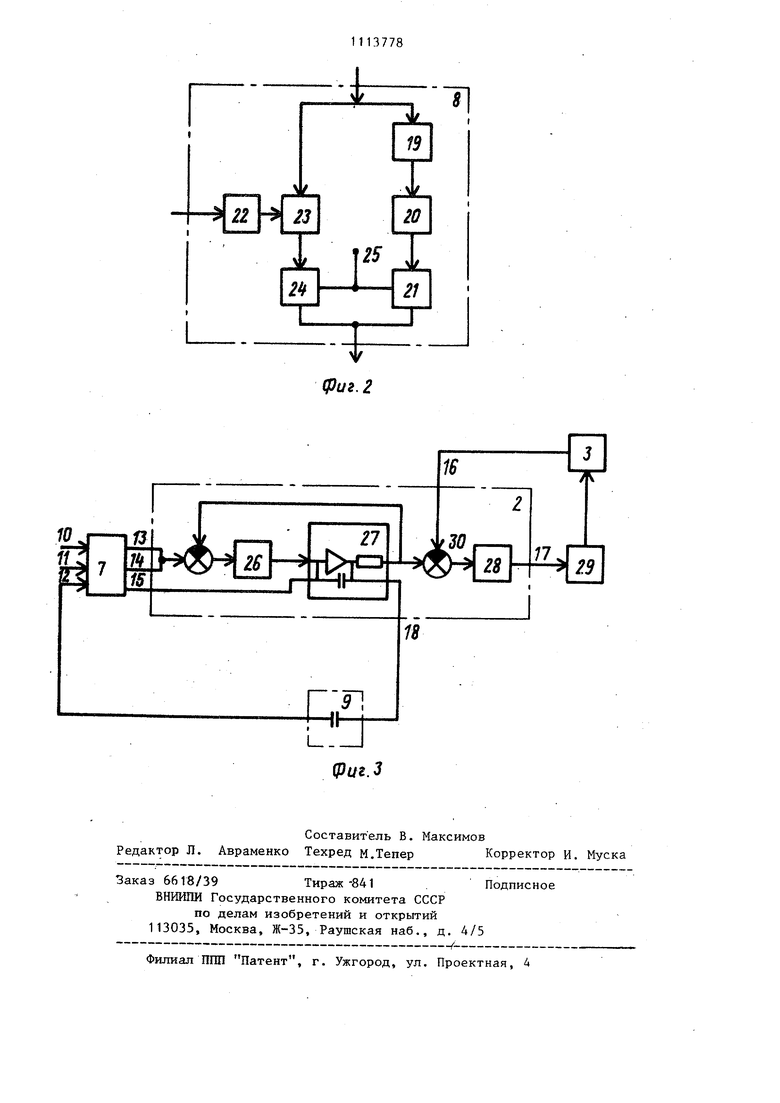
На фиг.1 приведена функциональная блок-схема предлагаемой резервированной системы автоматического управления: на фиг.2 - схема устройства контроля управляющего сигнала; на фиг.З - вариант блок-схемы резервного регулятора с блоком перестройки структуры.
Резервированная система автоматического управления (фиг.1) содержит вычислительный блок 1 (основной регулятор), резервиьп регулятор 2. датчик 3j задатчик А, пороговый элемент 5 элемент ИЛИ 6, блок переключателей 7, устройство 8 контроля управляющего сигнала, блок 9 перестройки структуры резервного регулятора. Блок 7 переключателей содержит
784
входы 10,11 и 12 и выходы 13,14 и 15, а резервный регулятор 2 - выходы 16,17 и 18.
Блок 8 содержит сглаживающий
фильтр 19, дифференцирующий усилитель 20, пороговый элемент 21, усилитель-инвертор 22 сумматор 23 и пороговый элемент 24, а также вход 25 для подключен ия электрической цепи.
Регулятор 2 может содержать ограничитель 26 входного сигнала, интегратор 27, усилитель 28,исполнительный орган 29 и сумматор 30.
Принцип работы систет состоит .
в следующем.
В режиме управления от вычислительного блока при появлении на выходе вычислительного блока недопустимого управляющего сигнала, например с недопустимой скоростью изменения или недопустимой величины, в устройстве контроля управляющего сигнала вырабатывается сигнал пере-, ключения режима управления на резервный регулятор, при этом происходит перестройка структуры резервного регулятора.
Для выполнения указанных функций устройство контроля управляющего сигнала содержит фильтр, дифференцирующий усилитель, усилитель-инвертор, сумматор и пороговые элементы, причем управляющий выходной сигнал вычислительного блока, проходя последовательно через фильтр, дифференцирующий усилитель и первый пороговый элемент, проверяется на отсутствие недопустимой скорости изменения, а проходя через сумматор и второй пороговый элемент - на отсутствие недопустимой величины. Наличие сумматора и соединенного с ним усилителяинвертора, на вход которого поступает сигнал задатчика, позволяет менять допускаемую величину управляющего сигнала в зависимости от величины сигнала задатчика.
При управлении от вычислительного блока структура резервного регулятора
перестраивается таким образом, что , он не оказывает существенного влияния на вьфабатываемый вычислительным блоком управляющий сиглнал, в то же время при переключении в режим управления от резервного регулятора на
его выходе не появляется скачкообразного изменения управляющего сигнала Это можно реализовать, например, перестраивая резервный регулятор в режиме управления от вычислительного блока в апериодическое звено с такой постоянной времени, чтобы управляющий сигнал, вырабатываемый вычислительным блоком, проходил через это звено без существенных искажений. Таким образом, система блокирует прохождение на исполнительный орган недопустимых управляющих сигналов, возникающих при.любых отказах вычис- . лительного блока, а переход на резерв ный регулятор происходит без скачкообразных возмущений, что существенно повышает надежность и безопасность системы управления, Система работает следующим образом. При управлении исполнительными орга нами от вычислительного блока 1 управляющий сигнал nocTvnaeT на вхоп 10 блока переключателей, далее (.через замкнутые контакты) на выход 13 блока переключателей и через резервный регулятор 2 на выход 17 к исполнительным органам. Резервный регулятор 2 при этом перестраивается в апериодическое звено с малой постоянной времени и не оказывает существенного влияния на качество процессов управления. Сигнал задатчика 4 поступает на вход вычисли тельного блока и вход 11 блока перекл чателей 7; в этом режиме он не проходит на выход 14 (контакты блока пер ключателей разомкнуты) . Сигнал датчика 3 поступает в вычислительный блок 1f резервный регулятор 2 (обратные связи и на пороговый элемент 5. При выходе регулируемого параметра, измеряемого датчиком 3, за допустимые значения появляется сигнал на выходе пороговог элемента 5. Блок ИЛИ 6 выдает сигнал в блок переключателей 7 на отключение вычислительного блока 1 и переход на управление от резервного регулятора 2 при наличии на его входе любого из трех сигналов: выходного сигнала из блока пороговых элементов 5, сигнала из вычислительного блока 1 о его отка зе, сигнала из устройства 8 контроля управляющего сигнала о недопустимой величине или с.корости изменения управ ляющега сигнала. Управляющий сигнал, вырабатываемый вычислительным блоком 1, проходит через фильтр 19, сглаживающий ступенчатое изменение сигнала цифро-аналогового преобразователя вычислительного блока, поступает на дифференцирующий усилитель 20, с выхода которого на пороговый элемент 21 поступает сигнал, пропорциональный скорости изменения выходного управляющего сигнала-. При увеличении скорости изменения сигнала вьпие допустимой, что может произойти, например, при неисправностях цифро-аналогового преобразователя на выходе вычислительного блока 1, пороговый элемент срабатывает, подключает электрическую цепь 25, и на выходе устройства контроля появляется сигнал,. Пороговый элемент 24 срабатывает, подключая электрическую цепь 25, при отклонении величины управляющего сигнала за допустимые значения. При этом допустимое значение величины управляющего сигнала формируется с обратньм знаком усилителем-инвертором 22, на выход которого поступает сигнал задат.чика 4. Коэффициент усиления усилителя-йнвертора определяет степень допустимого превышения величины управляющего сигнала по сравнению с сигналом задатчика. В некоторых режимах работы управляемого объекта существует ограничение на скорость перемещения исполнительного органа. Для упрощения конструкции резервного регулятора это ограничение распространяется на все режимы работы объекта управления. Для ограничения скорости перемеще исполнительного органа регулятор содержит развертывающее устройство, состоящее из ограничителя .26 входного сигнала и интегратора 27. При изменении заданного положения исполнительного органа задатчиком 4 на вход усилителя 28 подается не скачкообразный сигнал, а линейно нарастающий или убывающий (в зависимости от знака сигнала на входе ограничителя 26). Скорость развертки сигнала заданного положения исполнительного органа определяется величиной входного сигнала и постоянной времени интегратора 27. Подключение вычислительного блока для управления исполнительным органом 29 позволяет оптимизировать технологические процессы, так как положение и скорость перемещения исполнительного органа 29 определяются не только задатчиком 4, но и параметрами технологического процесса, состоянием управляемого объекта и другими условиями. Для этих целей
7.1
выходной аналоговый сигнал с вычислительного блока можно бьто бы подат непосредственно на сумматор 30 вместо сигнала с выхода интегратора 27. Однако при этом при передаче управления от вычислительного блока 1 резервному регулятору 2 не обеспечивается плавный переход, так как в момент переключения сигнал на выходе интегратора 27 может существенно отличаться от сигнала с выхода вычислительного блока, что приведет к резкому изменению положения исполнительного органа. Для обеспечения плавного перехода режима управления с вычислительного блока на резервный регулятор предлагается выходной сигнал вычислительного блока подать на вход резервного регулятора.
Блок 9 перестройки структуры содержит конденсатор, который соединен с вькодом 18 резервного регулятора и входом 12 блока.переключателей. В режиме управления от вычислительного бл,ока этот конденсатор (блок 9) отключается блоком переклю.чателей (размыкаются вход 12 и выход 15)и вследствие уменьшения емкости уменьшается постоянная времени, а интегратор фактически перестраивается в апериодическое звено.
Резервным регулятором может быть любой электрогидравлйческий или электромеханический регулятор, на вход которого подаются электрические сигналы. Например, в качестве резервного регулятора может быть использован канал регулятора АРМ-5, устанавливаемого в системе управления на атомных станциях. Подключение вычислительного блока в этом
788
случае позволяет оптимизировать процесс управления.
Предлагаемая система управления по сравнению с известными системами защищена от большого числа отказов вычислительного блока, в том числе и возникающих из-за ошибок в программном обеспечении. Применение простых и надежных средств контроля управляющих сигналов вычислительного блока, резервньк регуляторов делает систему менее зависимой от вычислительного блока и позволяет строить более надежные и экономичные системы автоматического управления, в том числе и для ядерных реакторов.
По сравнению с базовым объектом, в качестве которого выбрана современная система управлення реактором большой мощности атомной электростанции, предлагаемая система может выполнять дополнительные функции например оптимальное распределение поля энерговыделений в реакторе. Известно, что повышение теплонапряженности реакторов атомной электростанции мощностью 2 млн.кВт только на 1% в результате улучшения качества управления при сохранении надежности реакторов дает экономический эффект, в несколько раз превьшающий затраты на вычислительную машину БЭСМ-6.
Существующие системы управления реакторами атомной электростанции не могут выполнять функции оптимального распределения поля энергрвыделения в силу необходимости выполнения сложных вычислений по определению управляюш 1х воздействий.
| название | год | авторы | номер документа |
|---|---|---|---|
| Установка для регулирования положения сооружений | 1991 |
|
SU1795000A1 |
| СИСТЕМА УПРАВЛЕНИЯ | 2011 |
|
RU2527570C2 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ | 2011 |
|
RU2494006C2 |
| Система автоматического управления процессом получения сернистого газа в производстве серной кислоты | 1989 |
|
SU1641770A1 |
| Устройство для управления исполни-ТЕльНыМи МЕХАНизМАМи | 1979 |
|
SU811217A1 |
| Устройство для контроля объектов | 1990 |
|
SU1725233A1 |
| Устройство для управления холодопроизводительностью компрессора холодильной машины | 1982 |
|
SU1062198A1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ | 2013 |
|
RU2534955C1 |
| РЕГУЛЯТОР ПНЕВМОЭЛЕКТРИЧЕСКИЙ | 2005 |
|
RU2308067C2 |
| Программная следящая система | 1981 |
|
SU1108394A1 |
1. РЕЗЕРВИРОВАННАЯ СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ, содержащая основной регулятор, первый информационный вход которого соединен с выходом задатчика, информационный выход - с первьм входом элемента ИЛИ, а управляющий выход - с первым входом блока переключателей, первый выход которого соединен с первым входом исполнительного органа, второй вход - с вторым выходом блока переключателей, второй вход которого соединен с выходом задатчика, выход датчика соединен с вторым информационным входом основного регулятора, третьим входом резервного регулятора и входом блока пороговых элементов, выход которого соединен с вторым входом элемента ИЛИ, выход которого соединен с управляющим входом блока переключателей, отличающаяся тем, что. с целью повьпиения надежности системы, она содержит устройство контроля управляющего сигнала, блок перестройки структуры резервного регулятора, управляющий выход основного регулятора соединен с первым входом устройства контроля управляющего сигнала, второй вход которого соединен с выходом задатчика, а выход с третьим входом -элемента ИЛИ, вход блока перестройки структуры резервного регулятора соединен с вторым выходом резервного регулятора, а выход - с третьим входом блока переключателей, третий выход которого соединен с четвертым входом резервного регулятора. (Л 2. Система поп.1, отлича ющ а я с я тем, что устройство контроля управляющего сигнала содержит фильтр, дифференцирующий усилитель, усилитель-инвертор, сумматор, первый и второй пороговые элементы, причем первый вход устройства соединен последовательно через фильтр и дифференцирующий усилитель с входом 00 первого порогового -элемента и через сумматор - с входом второго порогового элемента, второй вход устройсГва 00 через усилитель-инвертор соединен с вторым входом сумматора, выходы пороговых элементов соединены с выходом устройства.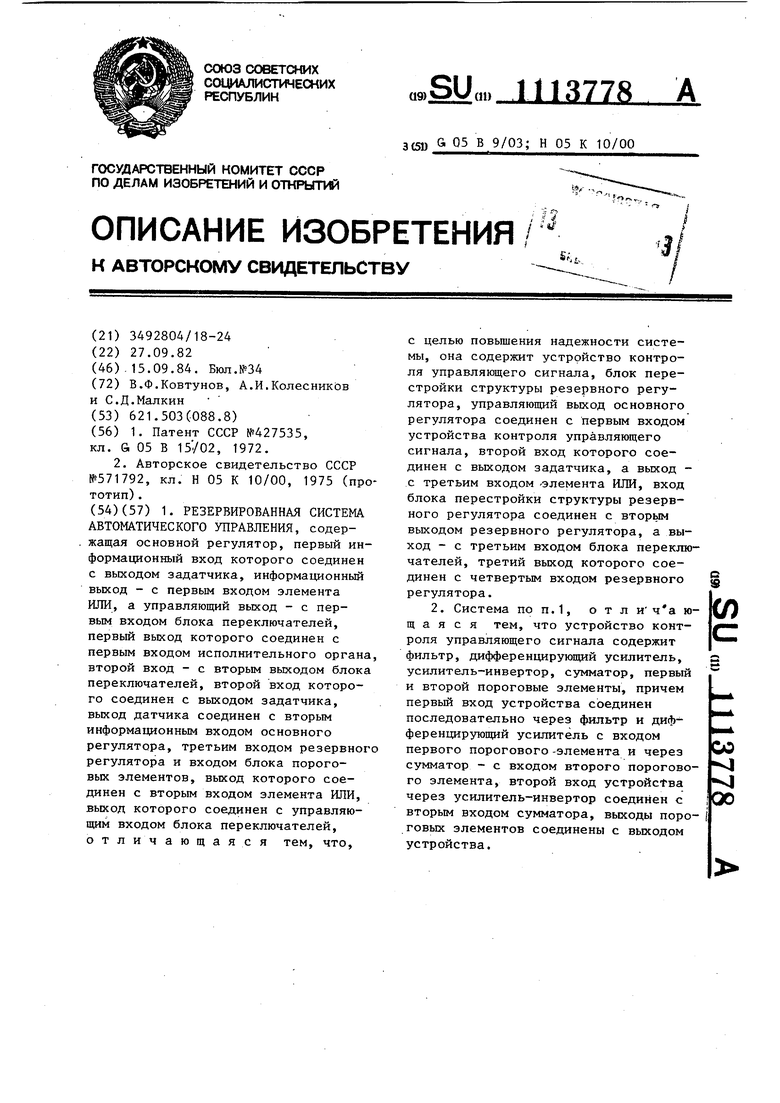
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| 1969 |
|
SU427535A3 | |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Резервированная управляющая система | 1975 |
|
SU571792A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
