Изобретение относится к схеме согласно ограничительной части пункта 1 формулы изобретения.
Подобная схема известна из ЕР-0052759 B1. Там сообщается о схеме включения стрелочного электропривода, привод которой питается от сети трехфазного тока. Контроль соответствующего положения привода происходит через устройства контроля постоянного напряжения, которые связаны с питающими линиями. Во время перевода стрелки контрольные устройства стрелок отключены. Известная схема задумана исключительно для стрелочных приводов, эксплуатируемых через четыре жилы. Для управления и контроля эксплуатируемых, например, в шестипроводной схеме трехфазных стрелочных приводов или для однофазных приводов известная схема не пригодна. Для таких схем привода должны разрабатываться специальные переводные (установочные) и контрольные цепи.
Задачей настоящего изобретения является такое дальнейшее развитие схемы согласно ограничительной части пункта 1 формулы изобретения, чтобы она была применимой для любых схем привода, причем конструкция должна быть всегда одинаковой как относительно подключения переводного тока (тока уставки), так и контроля. Такая схема имела бы большое преимущество, что она является применимой для любого типа привода.
Изобретение решает эту задачу за счет применения отличительных признаков пункта 1 формулы изобретения. Для снабжения стрелочных приводов переводным током и их контроля в центральном или децентральном управляющем и контрольном устройстве применяются разработанные унифицированные переводные (установочные) частичные модули, которые приспосабливают к соответствующему случаю применения с помощью мостиковых контактов.
Предпочтительные формы выполнения и развития соответствующей изобретению схемы указаны в зависимых пунктах формулы изобретения.
Изобретение поясняется ниже более подробно с помощью представленных на чертеже примеров выполнения.
Фиг. 1 показывает в схематическом представлении разделение схемы на переводной блок и контрольный блок.
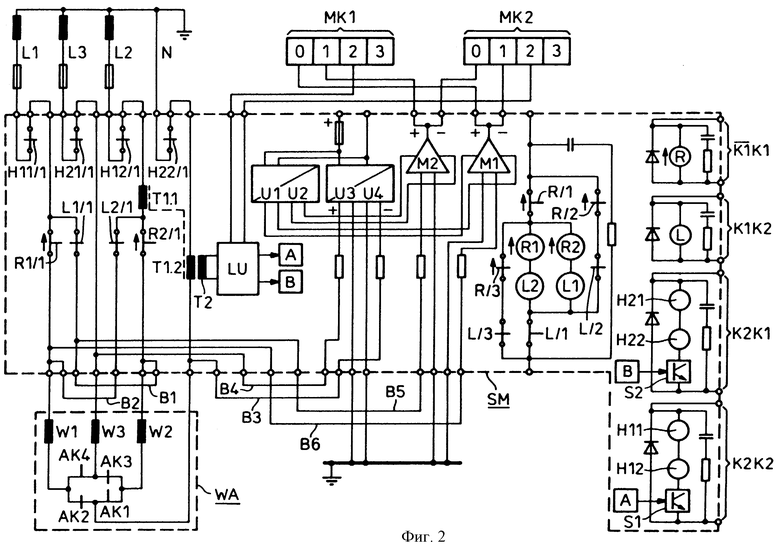
Фиг. 2 - конкретное выполнение схемы для четырехжильно эксплуатируемого стрелочного привода.
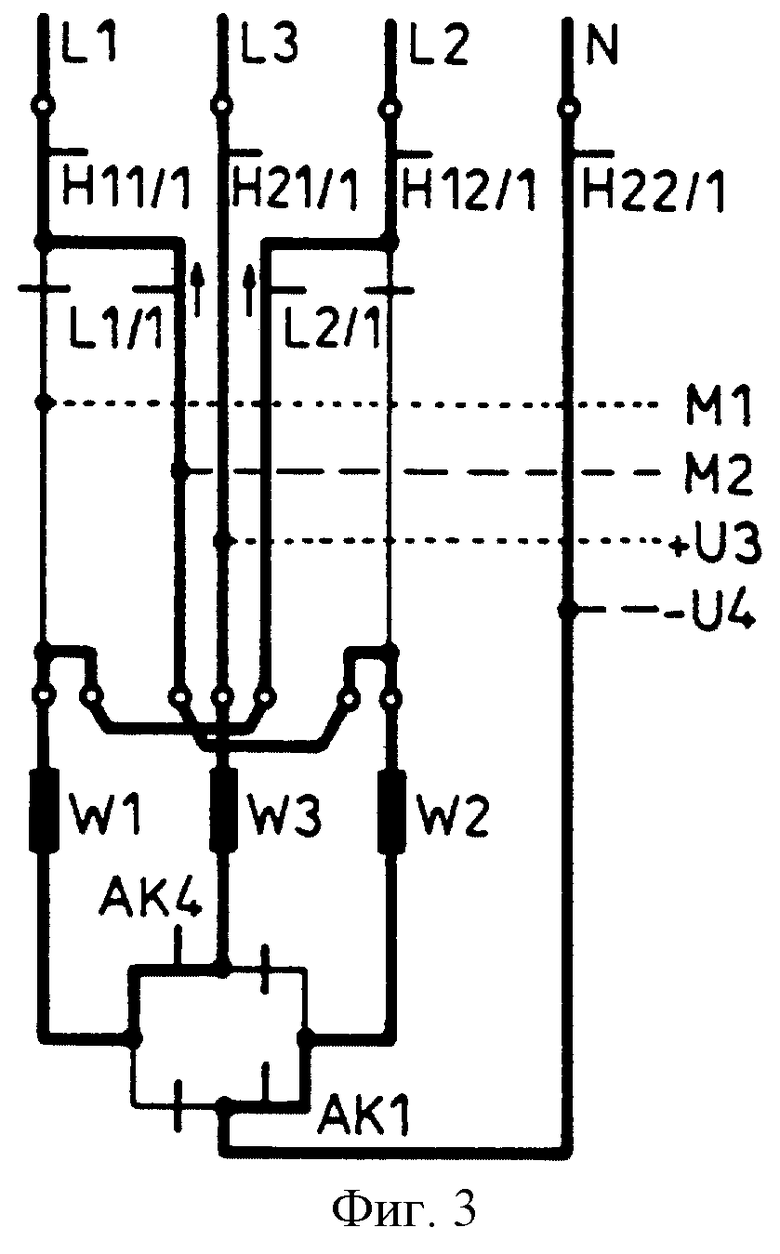
Фиг. 3-7 - ход образующихся в различных фазах переключения контрольных контуров.
Фиг. 8 - таблица истинности для контрольных сообщений сигнализаторов.
Фиг. 9-12 - контрольные контуры для шестижильно эксплуатируемого стрелочного привода.
Фиг.13 - конкретное выполнение схемы для однофазного привода, эксплуатируемого через семь жил.
Управляемые реле или контакторами контакты обозначены на чертеже ссылочными позициями для этого реле или контактора и текущим номером, следующим после косого штриха.
Схема согласно изобретению в ее пространственном конструктивном выполнении является частью переводного частичного модуля SM. Она разделяется на переводной блок SM и контрольный блок UB; оба блока находятся в соединении с друг другом. Переводной частичный модуль SM соединяет стрелочный привод WA с токоснабжением SV и с управляющей и контролирующей вычислительной системой RS. Токоснабжение происходит из сети переменного тока с опорным потенциалом земля; стрелочный привод WA выполнен, например, в виде трехфазного стрелочного привода и питается через четыре жилы. Для последовательного замыкания линий электроснабжения в переводном блоке SB служат, например, контакты не представленных пусковых реле и контакты реле контроля положения стрелки. Эти реле являются частью релейного управления RA, которое получает свои управляющие указания из вычислительных каналов К1 и К2 управляющей и контролирующей вычислительной системы RS. Для токоснабжения пусковых реле и реле контроля положения стрелки предусмотрено токоснабжение постоянного тока GV; редукторный блок GV* поставляет постоянные отнесенные к земле контрольные напряжения. Они требуются в контрольном блоке UB для получения обратных сообщений о положении стрелочного привода. В сигнальном управлении MA эти сообщения состояния преобразуют в контрольные сообщения, которые подводят к обоим вычислительным каналам вычислительной системы RS и там оценивают. Для присоединения потенциалов электроснабжения из контрольного блока в переводной блок и для обратной передачи характеризующих соответствующее положение привода контрольных потенциалов из переводного блока в контрольный блок имеются реализованные мостиковыми контактами в соединения между переводным блоком SB и контрольным блоком UB. С помощью этих мостиковых контактов, как еще будет показано, могут включаться требуемые зависимости между переводным блоком и контрольным блоком; эти зависимости обусловлены различными стрелочными приводами и различными приводными схемами.
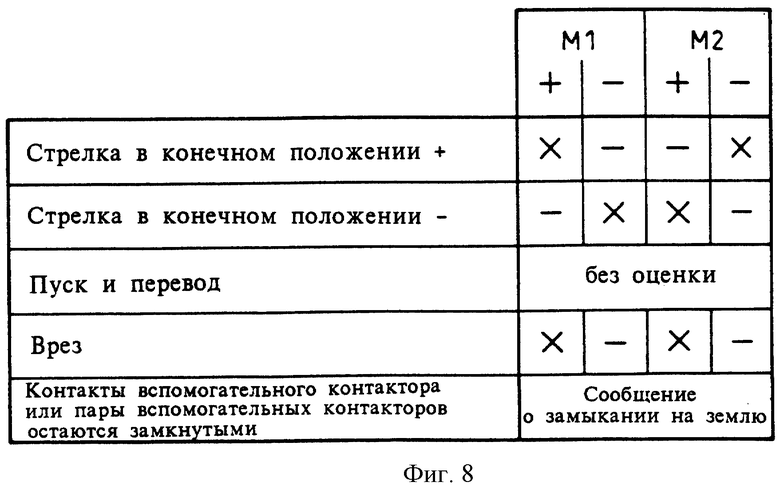
Фигу.2 показывает конкретное выполнение соответствующей изобретению схемы в ее применении в эксплуатируемом через четыре жилы трехфазном стрелочном приводе WA; сеть переводного напряжения (напряжения уставки) снабжена заземлением в качестве опорного потенциала. Соответствующее направление движения привода задается от управляющей вычислительной системы двухканально путем под- или соответственно отключения реле направления R или соответственно L для одного или соответственно другого направления движения. В представленном примере выполнения предположено, что стрелка находится в плюсовом положении, причем средства переключения схемы занимают положения переключения, представленные на фиг.2. Для контроля положения стрелки предусмотрены только схематически намеченные сигнализаторы M1, M2, которые при достаточно высоком входном потенциале (контрольный потенциал) имеют на одном из двух выходов сигнальный потенциал; такие сигнализаторы являются известными в связи с контролем световых сигналов, например, из DЕ 3516612 С2. Включенные от одного или соответственно другого выхода синальные потенциалы вводятся с правильной фазой в соответствующих местах в сигнальные телеграммы MK1, MK2 и передаются на оба вычислительных канала оценивающей вычислительной системы. При этом устройство выполнено так, что оба сигнализатора M1, M2 при правильном состоянии в конечном положении привода всегда имеют на не одинаковых выходах сигнальные потенциалы и включают на оба вычислительных канала, причем подключение на один или соответственно другой выход является зависимым от того, находится ли стрелка в положении плюс или минус. Только при неполадках, а именно при врезе стрелки или других ошибках, например, если отдельные включенные в цепь переводного тока стрелочного привода контакты занимают ошибочное положение переключения, оба сигнализатора имеют на соответствующих друг другу выходах потенциал одинаковой полярности или они оба не имеют никакого сигнального потенциала, что тогда привлекается оценивающей вычислительной системой для распознавания неисправности (фиг.8).
Для токоснабжения сигнализаторов предусмотрены два отдельных источника постоянного напряжения U1, U2. Дальнейшие источники постоянного напряжения U3, U4 служат для подготовки контрольных потенциалов для управления сигнализаторов M1, M2. Контрольные потенциалы подводят к сигнализаторам через приводные контакты. Плюсовой или соответственно минусовой полюс обоих источников постоянного напряжения U3, U4 соответственно соединен через отдельную линию с землей. Общая земля образует опорный потенциал для обоих сигнализаторов; он направляется на сигнализаторы через отдельные линии. Путем отдельных линий от источников постоянного напряжения U3, U4 и сигнализаторов M1, M2 к общему опорному потенциалу могут надежно распознаваться возможные прерывания линий к опорному потенциалу. Общий опорный потенциал источников постоянного напряжения U3, U4 и сигнализаторов M1, M2 является тем же самым, к которому приложено также снабжение переводным током. Выведенные сигнализаторами из подведенных к ним контрольных потенциалов сигнальные потенциалы оцениваются вычислительными машинами только при отключенном в соответствии с режимом работы приводе. Если при отключенном приводе вследствие неисправности, например приваривании контактов, одна или несколько переводных жил к приводу еще остаются последовательно замкнутыми, то переводное напряжение наложилось бы на подключенный приводной стороной контрольный потенциал и по меньшей мере один из сигнализаторов не имел бы ни на одном из своих выходов сигнального потенциала. Это было бы тогда распознано оценивающими вычислительными машинами как неисправность (сообщение о коротком замыкании) и на это они заданным образом бы отреагировали.
В представленном положении привода плюсовой потенциал подготовленного источником постоянного напряжения иU3 контрольного напряжения лежит через обмотку двигателя W3, приводной контакт АК4 и обмотку W1 на не лежащем на земле сигнальном входе сигнализатора M1, а отрицательный потенциал источника постоянного напряжения U4 через приводной контакт AK1 и обмотку W2 на не лежащем на земле сигнальном входе сигнализатора М2. Сигнализатор M1 таким образом имеет сигнальный потенциал на своем плюсовом выходе, а сигнализатор М2 на своем минусовом выходе. Сигнальные потенциалы обоих сигнализаторов лежат соответственно в битовом положении 0 обоих сигнальных телеграмм МК1, МК2. При другом конечном положении стрелки сигнализаторы занимали бы своими сигнальными потенциалами битовое положение 1 сигнальных телеграмм MK1, MK2. Оценивающая вычислительная система распознает по двухканально подведенным к ней сигнальным потенциалам соответствующие положения привода контролируемого ею стрелочного привода.
В последующем предположено, что стрелка должна переключаться в другое положение. Переключение вызывается вычислительной системой. Для этого оба вычислительных канала вырабатывают независимо друг от друга соответствующие управляющие команды для приданных им реле направления R или соответственно L. При этом за счет команды К1К2 (фиг.1) из вычислительного канала К2 подключается реле направления L и до сих пор включенное реле R по команде  из вычислительного канала К1 отключается. Контакты этих реле при этом изменяют свое положение коммутации, причем контакты R/1 и L/1 открываются, а контакты R/2, R/3 и L/2, L/3 закрываются. Эти контакты лежат в цепях тока подключения бистабильных реле контроля положения R1, R2, L1, L2. Бистабильные реле контроля положения служат для того, чтобы своими контактами R1/1, L1/1, R2/1, L2/1 задавать в цепи питающего тока приводного двигателя соответствующее направления движения; они переключаются кратковременным включением напряжений электроснабжения. Каждое реле контроля положения имеет только один единственный переключающий контакт и только одну единственную установочную обмотку. Это означает, что для переключения реле контроля положения в соответственно другое стабильное положение должно переключаться направление тока в реле контроля положения. В настоящем случае это происходит через контакты R/2, L/2 и R/3, L/3 или соответственно R/1, R/2. Соответственно два из четырех реле контроля положения включены последовательно друг с другом, причем расположение выбрано так, что в зависимости от подключения реле направления R или реле направления L или оба реле контроля положения R1 и R2 включены в активное положение и оба реле контроля положения l1 и L2 в нормальное положение или наоборот.
из вычислительного канала К1 отключается. Контакты этих реле при этом изменяют свое положение коммутации, причем контакты R/1 и L/1 открываются, а контакты R/2, R/3 и L/2, L/3 закрываются. Эти контакты лежат в цепях тока подключения бистабильных реле контроля положения R1, R2, L1, L2. Бистабильные реле контроля положения служат для того, чтобы своими контактами R1/1, L1/1, R2/1, L2/1 задавать в цепи питающего тока приводного двигателя соответствующее направления движения; они переключаются кратковременным включением напряжений электроснабжения. Каждое реле контроля положения имеет только один единственный переключающий контакт и только одну единственную установочную обмотку. Это означает, что для переключения реле контроля положения в соответственно другое стабильное положение должно переключаться направление тока в реле контроля положения. В настоящем случае это происходит через контакты R/2, L/2 и R/3, L/3 или соответственно R/1, R/2. Соответственно два из четырех реле контроля положения включены последовательно друг с другом, причем расположение выбрано так, что в зависимости от подключения реле направления R или реле направления L или оба реле контроля положения R1 и R2 включены в активное положение и оба реле контроля положения l1 и L2 в нормальное положение или наоборот.
Контакты реле контроля положения включаются без нагрузки. Более того последовательное замыкание питающих линий к стрелочному приводу происходит через контакты H11/1, Н21/1, Н12/1 и Н22/1 вспомогательных контакторов Н11 до Н22. Эти вспомогательные контакторы, из которых соответственно два включены последовательно, включаются через соответствующие команды К2К1 или соответственно К2К2 из одного или соответственно другого вычислительного канала (фиг. 2). Их подключение происходит соответственно после реверсирования реле направления и реле контроля положения. Для этого оба вычислительных канала кратковременно регулируют последовательно включенные с вспомогательными контакторами переключатели S1, S2; затем переключатели удерживаются через еще поясняемое далее устройство контроля LU тока движения. Питание происходит при этом, как и раньше, из обоих вычислительных каналов, которые тем самым могут в любое время отменить подключение вспомогательных контакторов. Контакты вспомогательных контакторов в цепях питания приводного двигателя расположены так, что эти цепи питания создаются только тогда, когда притянулись приводимые в действие из различных вычислительных каналов вспомогательные контакторы, то есть оба вычислительных канала предпринимают подключение.
Для пояснения процессов при пуске, переводе и контроле стрелочного привода после достижения нового конечного положения делается ссылка на схематические представления фиг.3-7.
Фиг.3 показывает состояние к началу процесса перевода при пуске привода; приводные контакты AK1 до АК4 при этом еще не переброшены. Первая токовая цепь образуется через контакты H11/1, L1/1, обмотку W2, приводной контакт AK1 и контакт Н22/1 и вторая токовая цепь образуется через контакты Н21/1, обмотку W3, приводной контакт АК4, обмотку W1, контакт L2/1 и контакт Н12/1. Подведенные к сигнализаторам M1 и М2 положительные или соответственно отрицательные контрольные потенциалы, накладываются с переводным напряжением. По этой причине сигнальные потенциалы сигнализаторов M1 и М2 во время процесса перевода стрелки вычислительной системой не оцениваются. Вычислительная система распознает необходимость оценки или соответственно не оценки сигнальных потенциалов, например, из контрольных сообщений уже упомянутого устройства контроля тока движения LU.
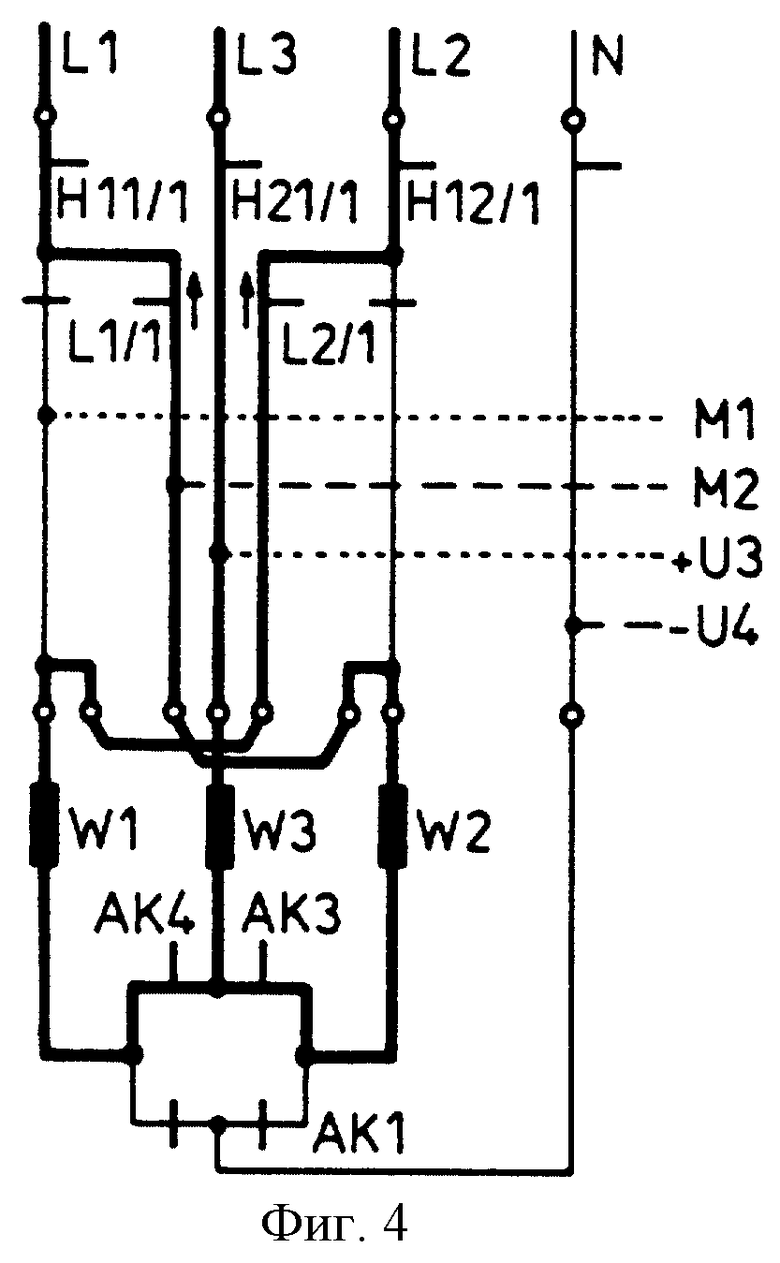
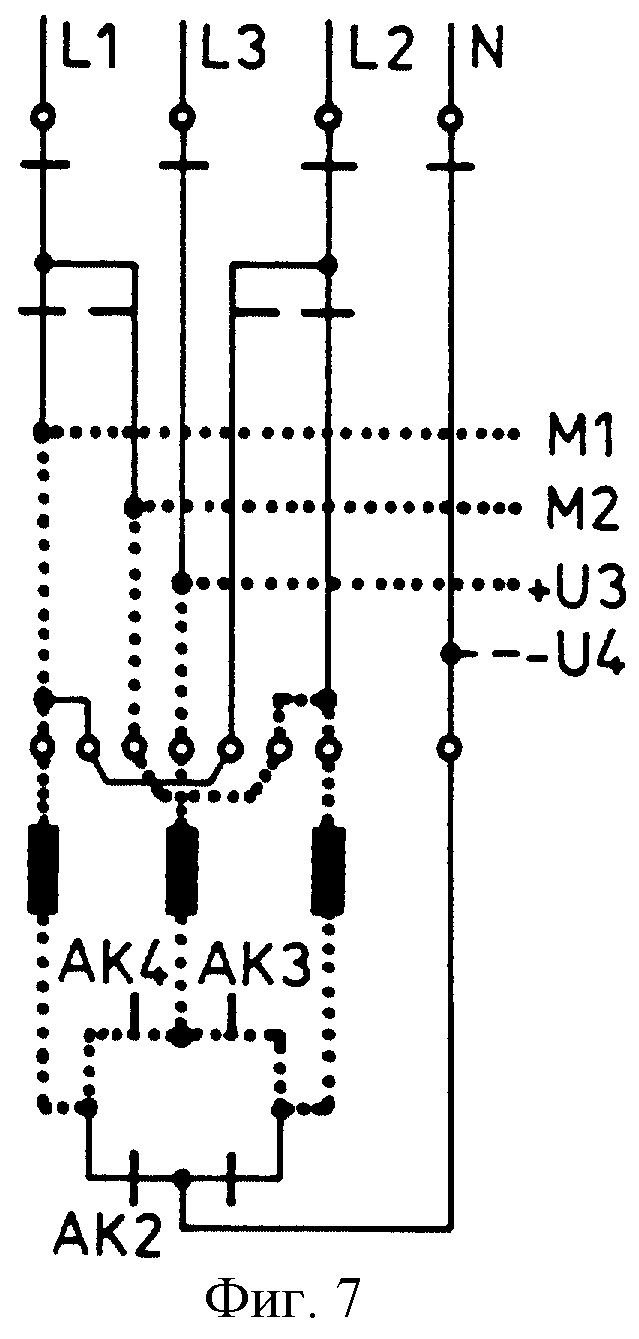
На фиг.4 представлены цепи питающего тока во время перехода после пуска привода. Приводные контакты AK1 и AK3 перекинулись; привод теперь работает в схеме звезды. Первая токовая цепь замыкается через H11/1, L1/1, обмотку W2, AK3, обмотку W3 и Н21/1 и вторая токовая цепь через Н12/1, L2/1, обмотку W1, приводной контакт АК4, обмотку W3 и Н21/1. Сигнальные потенциалы сигнализаторов M1, M2 как и раньше не оцениваются.
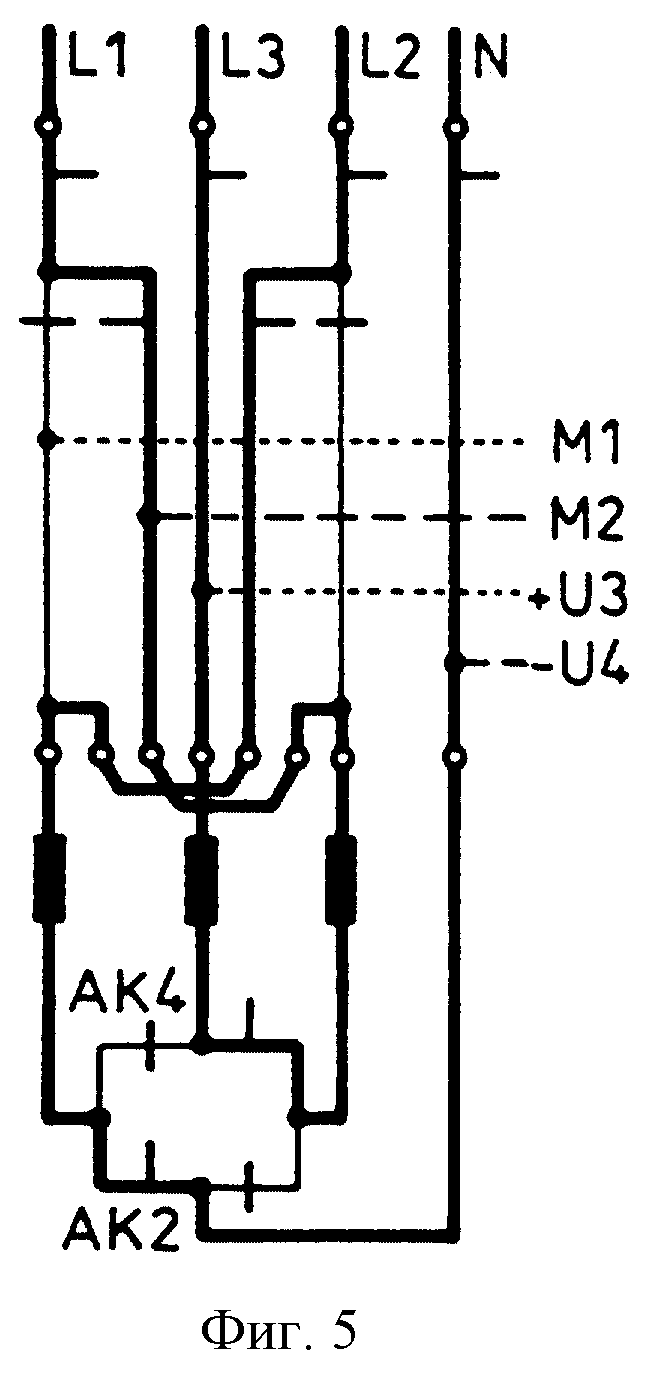
Фиг.5 показывает цепь стрелки в момент времени, к которому привод достигает конечное минусовое положение. При этом приводные контакты АК2 и АК4 перекинулись; устройство контроля тока движения отменяет управляющие напряжения для переключателей S1, S2 и вызывает таким образом отключение вспомогательных контакторов. Сигнальные потенциалы еще не оценивают, поскольку на контрольные потенциалы еще наложено переменное напряжение питания вследствие еще замкнутых контактов подключения.
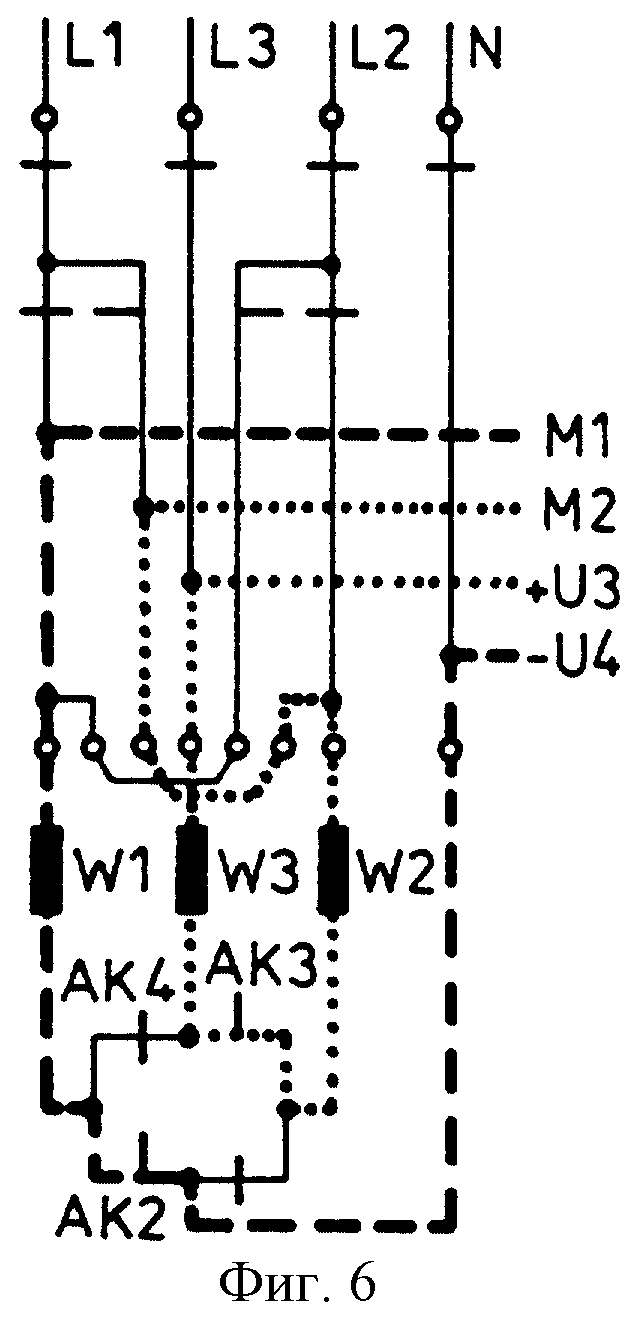
На фиг. 6 после открывания переключателей S1, S2 и обусловленного этим отключения вспомогательных контакторов их контакты прервали токоснабжение привода. Сигнальные потенциалы могут и будут теперь снова оцениваться вычислительной системой. Положительный потенциал источника постоянного напряжения U3 лежит через W3, AK3 и W2 на сигнализаторе М2, отрицательный потенциал источника постоянного напряжения U4 лежит через АК2 и W1 на сигнализаторе M1. Из снимаемых на выходах сигнализаторов сигнальных потенциалов вычислительная система распознает актуальное состояние привода.
Для полноты ниже объясняется возникновение контрольных сообщений при врезе привода из предположенного на фиг.6 конечного положения. Через перебрасывающийся при врезе привода контакт АК2 до сих пор существовавшее соединение между минусовым полюсом источника постоянного напряжения U4 и сигнализатором М2 прерывается. Одновременно через также переключенный приводной контакт АК4 положительный потенциал источника постоянного напряжения U3 включается на сигнализатор M1 и через приводной контакт AK3 также на сигнализатор М2. Оценивающая вычислительная система распознает из наличия одинаковых выходных сигналов обоих сигнализаторов наступившую неисправность и тем самым приводится в состояние реагировать соответствующим образом на это нарушение.
Соответствующие процессы получаются также при переводе привода из минусового положения в плюсовое положение, а также при врезе из положительного положения.
Фиг. 8 показывает в форме таблицы истинности получающиеся при отдельных положениях привода сигнальные потенциалы сигнализаторов M1, М2.
Ниже более подробно поясняется контрукция и функционирование устройства контроля тока движения LU.
Устройство контроля тока движения LU (фиг. 2) состоит в основном из трансформатора с двумя первичными обмотками Т1.1 и Т1.2 и вторичной обмоткой T2. Обе первичные обмотки имеют одинаковое число витков; однако они включены так, что текущие в них питающие токи создают противоположно направленные магнитные поля. Когда привод переводится, через обе первичные обмотки текут смещенные по фазе на 120o питающие токи. На вторичной обмотке устройства контроля тока движения таким образом возникает напряжение, которое является достаточным, чтобы удерживать лежащие последовательно с вспомогательными контакторами переключатели S1, S2 во время перевода стрелки в закрытом положении. При достижении нового конечного положения через первичные обмотки устройства контроля тока движения течет противоположно направленный питающий ток так, что напряжение на вторичной обмотке трансформатора спадает до нулевого значения. После этого устройство контроля тока движения открывает переключатели S1 и S2 в цепи питания вспомогательных контакторов и прерывает таким образом косвенно через их контакты токоснабжение стрелочного привода.
На случай, если устройство контроля тока движения по какой-либо причине не открывает своевременно переключатели S1 и S2 обоим вычислительным каналам присвоены функции таймеров, которые в случае неисправности отключают напряжение снабжения для вспомогательных контакторов. Контроль времени стартует при начале процесса перевода и прерывается после истечения заданного для перевода стрелки максимального времени движения привода.
Для включения эстремально мощных приводов возможно вначале приводить в действие через вспомогательные контакторы дополнительные контакторы, контакты которых тогда включают цепи питания привода.
В примере выполнения фиг. 2 с эксплуатируемым через четыре жилы трехфазным двигателем имеется в целом шесть мостиковых контактов В1 до В6, через которые осуществляется взаимодействие между частью схемы для подключения переводного тока и частью схемы для контроля. Мостиковые контакты установлены таким образом, чтобы реализовать перечисленные в пункте 1 формулы изобретения зависимости между функциями переведения и контроля. Для стрелочных приводов, которые эксплуатируются через другие схемы управления, для обеспечения предусмотренных зависимостей должны вводиться другие мостиковые контакты. Это поясняется ниже на основе другого примера выполнения, причем в случае привода речь идет о трехфазном приводе, который должен эксплуатироваться в целом через шесть питающих линий. Вместо шести мостиков здесь должны быть предусмотрены только четыре, а именно мостики В3 до В6; мостики В1 и В2 отпадают, поскольку линии к стрелочному приводу вследствие большего количества жил больше не должны использоваться многократно.
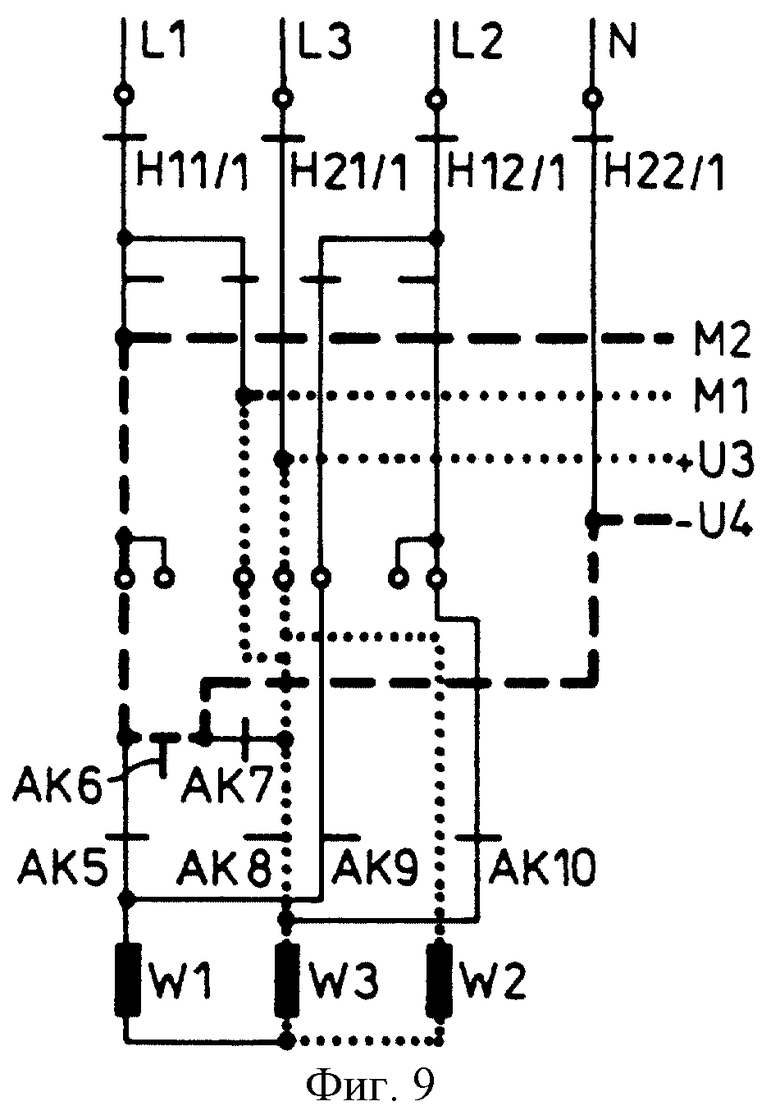
Фиг.9 показывает стрелочный привод в конечном положении, в котором соответствующая стрелка занимает плюсовое положение. Цепь питающего тока разомкнута и образуются следующие контрольные цепи: положительный потенциал источника проверочного напряжения U3, обмотки W1 и W3, приводной контакт АК8, M1; отрицательный потенциал источника проверочного напряжения U4, приводной контакт АК6, М2. Из подведенных к ней потенциалов оценивающая вычислительная система распознает актуальное состояние стрелочного привода.
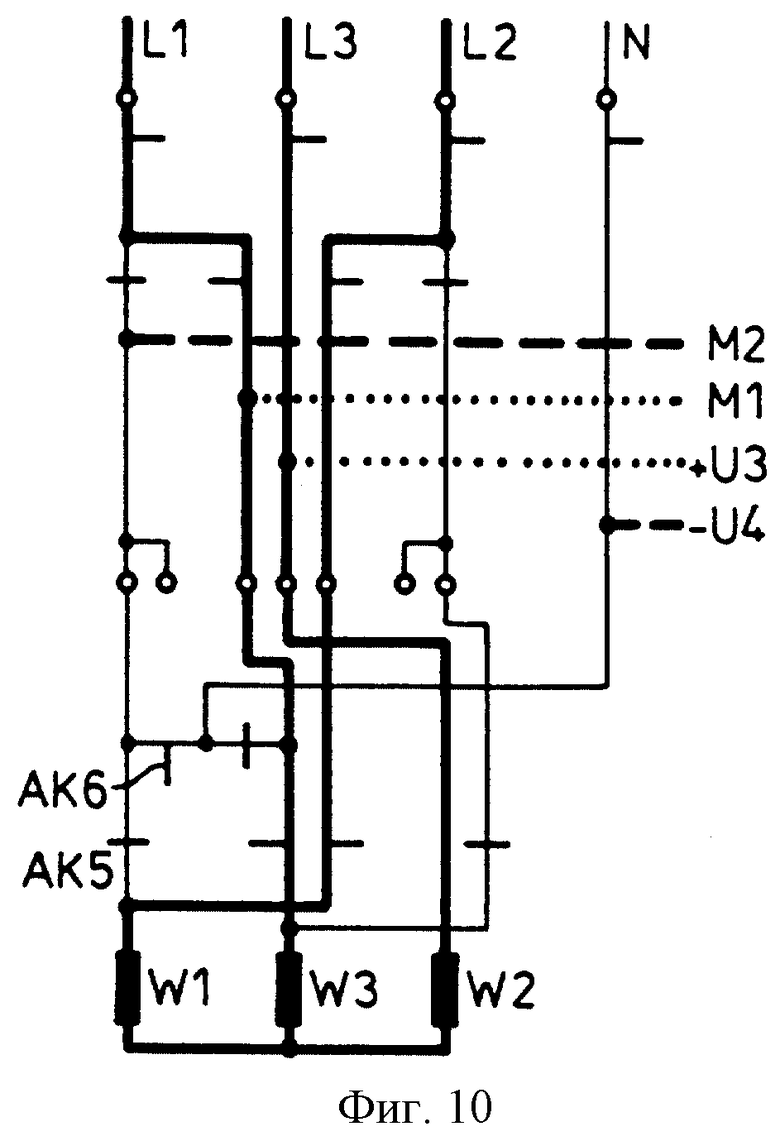
На фиг.10 представлено состояние цепей питания к началу перевода стрелки. После переключения реле контроля положения и подключения вспомогательных контакторов образуются представленные на фиг.10 толстыми линиями цепи питания. К обмоткам W1 и W3, а также W2 и W3 приложены соответственно связанные фазовые напряжения; привод начинает переводиться. При этом приводные контакты АК5 и АК6 (не представлено) перекидываются подготовительно для повторного подключения привода в другое положение. На контрольные потенциалы накладывается переводное напряжение; вычислительная система игнорирует выходные потенциалы обоих сигнализаторов.
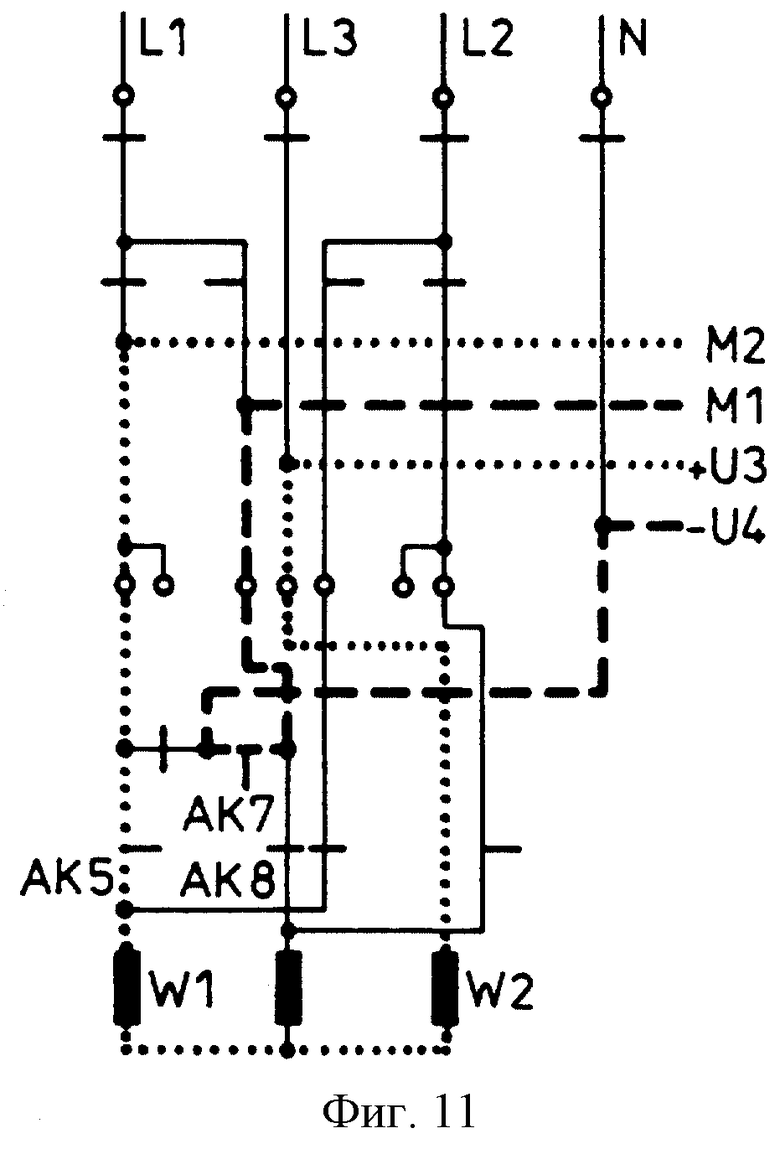
Коль скоро привод достиг новое конечное положение, перекинулись также и приводные контакты АК7 и АК8 на фиг.11. Таким образом цепи питающего тока для трех обмоток двигателя разомкнуты. Активированное текущим к этому моменту времени в линии L2 питающим током устройство контроля тока движения (фиг. 2) открывает переключатели S1, S2 в цепи питания вспомогательных контакторов H11 до Н22 и тем самым путем открывания контактов этих контакторов в цепи питания обмоток двигателя обеспечивает то, что привод отключается и может снова переводиться только тогда, когда обе вычислительных машины вычислительной системы вызывают новое подключение привода. С отключением переводного напряжения вычислительная система снова оценивает выходные потенциалы обоих сигнализаторов M1, M2. Положительный потенциал источника постоянного напряжения U3 подводится к сигнализатору M2, а отрицательный потенциал источника постоянного напряжения U4 подводится к сигнализатору M1. Оба выдают соответствующие сообщения двухканально на оценивающую вычислительную систему, которая распознает отсюда правильное достижение минусового конечного положения привода.
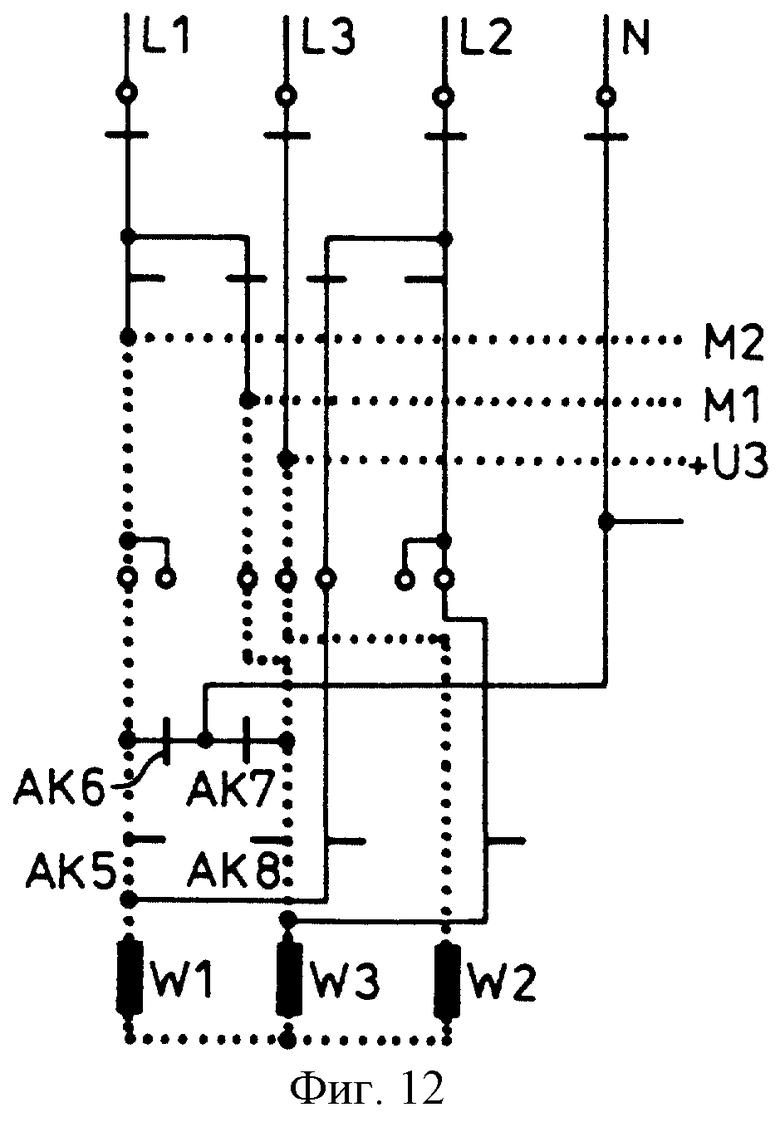
Фиг. 12 показывает прохождение цепей контрольных токов во врезанном состоянии стрелки, причем предположено, что стрелка находилась перед этим в плюсовом положении. При врезе стрелки контакты АК5 и АК6 перекинулись. Плюсовой полюс источника постоянного напряжения U3 лежит через обмотки W2 и W1, а также приводной контакт АК5 на сигнальном входе сигнализатора M2 и через обмотки W2 и W3 и приводной контакт АК8 на сигнальном входе сигнализатора M1. Из подключения положительного сигнального потенциала на оба вычислительных канала оценивающая вычислительная система распознает наступившую неисправность и выдает соответствующее сообщение о неисправности.
Соответствующие процессы, как это было пояснено на основе фиг.8-11, протекают также, если стрелка перебрасывается из минусового положения в плюсовое положение или соответственно стрелка врезается, исходя из минусового положения; для рассмотренного выше шестижильно эксплуатируемого стрелочного привода таблица истинности согласно фиг.8 является также справедливой.
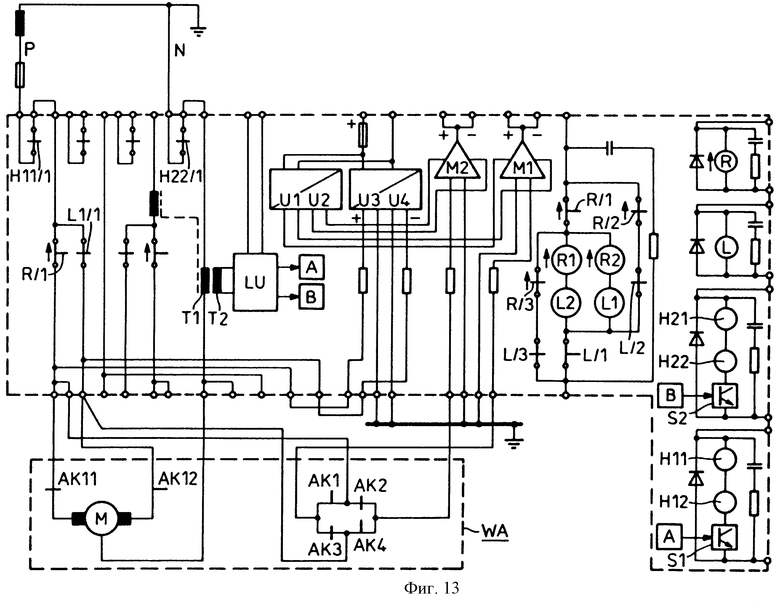
Фиг. 13 показывает соответствующую изобретению схему в ее применении в однофазном приводном двигателе М. Предположено, что управляемая приводом стрелка находится в плюсовом положении. При этом положительный потенциал источника постоянного напряжения U3 попадает через приводной контакт AK1 на сигнальный вход сигнализатора M1 и отрицательный потенциал источника постоянного напряжения U4 попадает через приводной контакт АК4 на сигнальный вход сигнализатора М2.
Когда стрелка должна переводиться, вычислительная система вызывает сначала подключение реле направления R и подключение реле направления L, причем их контакты в цепи питания бистабильных реле контроля положения R1, R2, L1, L2 перекидываются. При кратковременном подключении напряжения электроснабжения реле контроля положения L1 и L2 попадают в их активное положение и реле контроля положения R1 и R2 в нормальное положение. Контакт R1/1 реле контроля положения R1 открывается без нагрузки, в то время как контакт L1/1 реле контроля положения L1 закрывается без нагрузки; оба контакта определяют направление движения приводного двигателя при подключении переводного напряжения. Бистабильные реле контроля положения сохраняют свое соответствующее рабочее состояние также после отключения их напряжения электроснабжения. После переключения реле контроля положения вычислительная система вызывает подключение вспомогательных контакторов Н11 до Н22 таким образом, что она кратковременно устанавливает лежащие последовательно с вспомогательными контакторами переключатели S1 и S2 через вспомогательный конденсатор. Если после этого с закрыванием управляемых контакторами контактов подключения H11/1 и Н22/1 течет переводной ток, устройство контроля тока движения LU принимает на себя дальнейшее питание переключателей S1 и S2. Теперь привод переводится, причем вначале перебрасываются приводные контакты АК2 и АК4. Оба сигнализатора M1 и М2 имеют на своем плюсовом выходе потенциал, что однако не оценивается вычислительной системой вследствие введенного в контрольную цепь переводного напряжения. С достижением нового конечного положения перекидываются также приводные контакты AK1 и AK3. Отрицательный потенциал источника постоянного напряжения U4 лежит теперь через AK3 на сигнальном входе сигнализатора M1 и положительный потенциал источника постоянного напряжения U3 лежит через АК2 на сигнальном входе сигнализатора М2. С достижением нового конечного положения перекидываются также приводные контакты АК11 и AK12, причем приводной контакт AK12 прерывает цепь питающего тока для обмотки двигателя M и тем самым также обесточивает устройство контроля тока движения. Оно вызывает через переключатели S1 и S2 отключение вспомогательных контакторов и делает таким образом повторное подключение двигателя зависящим от воздействия вычислительной системы. Приводной контакт AK11 подготовительно закрывается для более позднего перехода стрелки в другое направление.
Конструкция частичного переводного модуля из переводного блока и контрольного блока, как показали вышестоящие рассуждения, является всегда одинаковой, независимо от того, через сколько жил эксплуатируется двигатель стрелочного привода. Выведение входов и выходов контрольного блока и переводного блока из частичного переводного модуля делает возможным, при необходимости электрически проводяще соединять эти входы и выходы друг с другом посредством мостиков и таким образом производить желательное взаимодействие между обоими блоками. Соединения при этом должны включаться так, чтобы контрольные потенциалы подавались через управляемые двигателем приводные контакты на сигнализаторы, чтобы при детектируемых положениях стрелки они действительно выдавали необходимые сигнальные напряжения. Соответствующая изобретению схема является поэтому применимой для любого принятого типа привода, независимо от того, через сколько питающих линий он снабжается энергией для перевода.
Для последовательного замыкания и размыкания цепей питающего тока для приводного двигателя применены контакты четырех вспомогательных контакторов. Если один из контактов остается висеть в открытом положении, например, если вспомогательный контактор больше не подключается, то привод, как правило, больше не достигает в течение допустимого времени перевода своего нового конечного положения. Оценивающая вычислительная система распознает появившуюся с отключением вспомогательных контакторов ошибку по тому, что по меньшей мере один сигнализатор не имеет на стороне выхода никакого потенциала. Если контакт одного из вспомогательных контакторов остается висеть в закрытом положении, например, поскольку он приварен, то сигнальный вход по меньшей мере одного из сигнализаторов лежит на общем опорном потенциале сигнализаторов и снабжения переводным током для привода; имеется соответствующее сообщение о неисправности. Также если вследствие ошибочного, только одноканального управления соответственно двух вспомогательных контакторов их контакты в цепи питания закрываются, это является заметным для вычислительной системы, поскольку оба сигнализатора на стороне входа лежат на опорном потенциале и таким образом сигнальный потенциал на обоих выходах сигнализатора отсутствует.
Контакты вспомогательных контакторов включены в цепи питающего тока приводного двигателя так, что переводной ток может вообще течь и привод переводиться только тогда, когда оба вычислительных канала выдали соответствующие команды подключения на вспомогательные контакторы и оба вычислительных канала последовательно замыкаются.
Вследствие постоянного контроля состояния переключения приводных контактов является возможным, выполнять их электронными. Какие-либо ошибочные функции подобных электронных переключателей определяются через сигнализаторы и распознаются вычислительной системой как неисправность.
Ошибки в устройстве контроля тока движения распознаются вычислительной системой при последующем переводе за счет несвоевременного или выпавшего сообщения тока движения.
В частности там, где на контрольные потенциалы во время перевода стрелки не накладываются никакие переводные напряжения, можно отказаться от контроля тока движения со стороны вычислительной системы для распознавания нового конечного положения привода, если вычислительная система вместо этого постоянно, то есть также и во время перевода стрелки, определяет сигнальные потенциалы сигнализаторов. Из появления совершенно определенных комбинаций сигнальных потенциалов вычислительная система может делать заключение о достижении нового конечного положения и выводить отсюда необходимость контролировать с этого момента конечное положение привода.
Ошибки в месте стыка от вычислительной машины в направлении управления переводной части (длительные или отсутствующие релейные управления) проявляются как дефекты реле или их контактов и таким образом обнаруживаются как описано выше.
В направлении сообщений к вычислительной машине ошибки (отсутствующие или длительные сообщения) раскрываются как сообщения вне схемы сигнализации.
В кабельной установке для привода продольные сопротивления вплоть до прерываний или короткие замыкания должны предполагаться как замыкания жил. Продольные сопротивления, начиная с определенного значения, распознаются через отключение сообщения или уже если двигатель больше не запускается, движется слишком долго или не достигает конечного положения.
Замыкания жил вызывают при соответствующей низкоомности при процессе перевода срабатывание предохранителей переводного напряжения и, кроме того, приводят к отключению сообщений при замыкании жил с различным потенциалом сигнального напряжения. Замыкания жил с одинаковым сигнальным потенциалом распознаются после следующего процесса переведения.
Изменения полярности в трехфазной сети электроснабжения, исходящие от питания с централизационного поста, распознаются при следующем процессе перевода за счет ошибочных, то есть не ожидаемых сообщений. За счет переключения реле контроля положения для перестановки переполюсованные линии подключаются на жилы к приводу в том же фазовом положении, что и при переводе перед этим. Двигатель работает в соединении и сообщения не меняются, поскольку приводные контакты не перебрасываются.
В поясненных выше примерах выполнения включаемые устройствами контроля тока движения выходные напряжения служат не только для замыкания или размыкания переключателей S1, S2; они сообщают оценивающей вычислительной системе также о необходимости оценивать или не оценивать выходные сигналы сигнализаторов (во время перевода стрелки). Предпочтительная форма развития выше поясненного устройства предусматривает, что устройство контроля тока движения непосредственно воздействует своим выходным напряжением на сигнализаторы и включает их входы или выходы во время перевода стрелки, например, через блокирующие звенья в неактивное состояние; воздействие на вычислительную систему становится тогда излишним.
Изобретение относится к области управления и контроля стрелочных переводов. Для идентификации положения привода предусмотрены два контролируемых сигнализатора. Сигнализаторы и источники постоянного напряжения включены между одной или другой совместно переключаемыми при переводе привода парами соседних приводных контактов. Схема разделена на переводной блок, содержащий средства переключения, и контрольный блок, содержащий сигнализаторы (M1, M2). Входы и выходы последних выведены независимо друг от друга из содержащего обе части схемы переводного частичного модуля. Выходы обеих частей схемы соединены мостиковыми контактами для получения заданных зависимостей между функцией перевода и контроля для всех встречающихся типов привода. Технический результат - возможность применения для любых схем электроприводов. 14 з.п.ф-лы, 13 ил.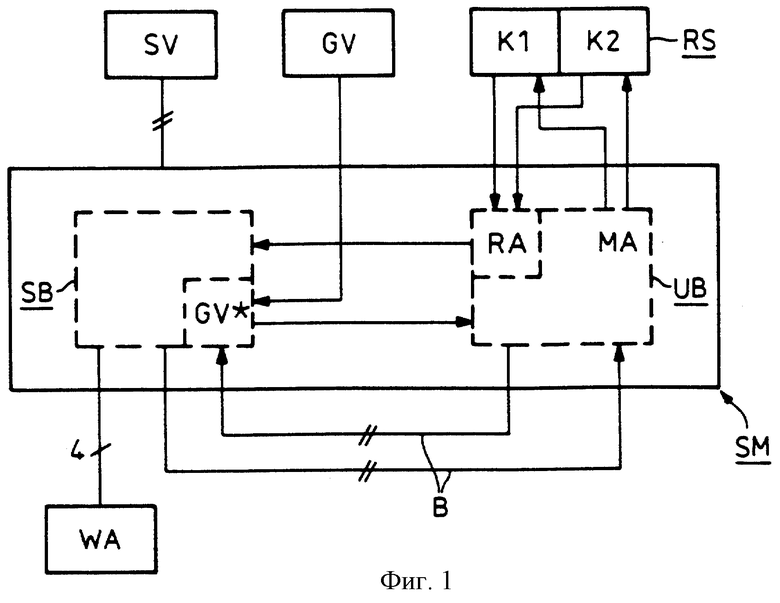
| БИБЛИО! ?КА | 0 |
|
SU371110A1 |
| УСТРОЙСТВО для УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ | 0 |
|
SU288012A1 |
| ТРЕХПРОВОДНОЕ УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ТРЕХФАЗНЫМ СТРЕЛОЧНЫМ ЭЛЕКТРОПРИВОДОМ С МЕСТНЫМ РЕВЕРСИРОВАНИЕМ | 1990 |
|
RU2025354C1 |
| Композиция на основе диорганополисилоксана, содержащего концевые ацилоксигруппы | 1974 |
|
SU517614A1 |
| DE 3004366 А1, 08.07.1982 | |||
| УСТРОЙСТВО ДЛЯ ОБРАБОТКИ СОЛОМЫ НА КОРМ | 1989 |
|
RU2038031C1 |
| DE 15300379 А, 16.09.1973 | |||
| US 3557364 A, 19.01.1971 | |||
| US 3696244 A, 03.10.1972 | |||
| СПОСОБ ОПРЕДЕЛЕНИЯ СОРБЦИОННОЙ СПОСОБНОСТИ ХЛЕБА, СОДЕРЖАЩЕГО ПЕКТИН | 2010 |
|
RU2445618C1 |
| Шихта для производства керамзита | 1973 |
|
SU500200A1 |

