Изобретение относится к медицинской технике и может быть использовано для оценки произвольного внимания и координации двигательных актов при профессиональном отборе операторов, деятельность которых связана с необходимостью пространственного определения расположения объекта, распознавания и локализации его траектории в условиях дефицита времени, регламентированном режиме слежения и временной неопределенности появления сигналов, а также требует устойчивой координации управляющих действий.
Известен способ аналогичного назначения, реализованный на основе координометра Руппа [1], по которому в трех режимах исследуется координация движения рук оператора при выполнении задания в свободном темпе, при пространственной неопределенности предъявления задания и при заданном темпе выполнения задания.
На основе полученных показателей рассчитывается коэффициент устойчивости координации двигательных актов.
Недостатком известного способа является невозможность динамической оценки устойчивости психофизиологических функций оператора при изменении его функционального состояния.
Известен способ определения устойчивости психофизиологических функций оператора, включающий предварительное формирование перед оператором первого зрительного образа, формирование оператором второго управляемого зрительного образа, манипулирование положением этого образа относительно первого до их совпадения и определение устойчивости психофизиологических функций оператора по степени совпадения первого и второго зрительных образов [2].
Данный способ [2] принят за прототип.
Недостатком прототипа, как и у аналога, является невозможность динамической оценки устойчивости психофизиологических функций оператора при изменении его функционального состояния.
Техническим эффектом, получаемым от внедрения изобретения, является возможность регистрации параметров устойчивости психофизиологических функций оператора в динамике его функционального состояния.
Данный технический результат достигают тем, что в известном способе определения устойчивости психофизиологических функций оператора, включающем предварительное формирование перед оператором первого зрительного образа, формирование оператором второго управляемого зрительного образа, манипулирование положением этого образа относительно первого до их совпадения и определение устойчивости психофизиологических функций оператора по степени совпадения, причем первый зрительный образ формируют в динамическом режиме, а формирование второго зрительного образа и манипулирование им до совпадения с первым оператор проводит бимануально двумя сенсорами, с помощью которых измеряют биомеханические параметры оператора и тремор, по величине которых определяют устойчивость психофизиологических функций оператора.
В частном случае в качестве сенсоров можно использовать датчики давления.
На фиг. 1 представлена блок-схема устройства для реализации способа, на фиг. 2 и 3 - результаты конкретной реализации способа.
Устройство для реализации способа содержит два сенсора, выполненные, например, в виде двух кнопочных датчиков давления 1, 2, два предварительных усилителя 3, 4, два усилителя переменного тока 5, 6, аналого-цифровой преобразователь (АЦП) с коммутатором 7, процессор 8 с дисплеем 9.
Схема электрических соединений устройства вытекает из чертежа.
Способ реализуется следующим образом.
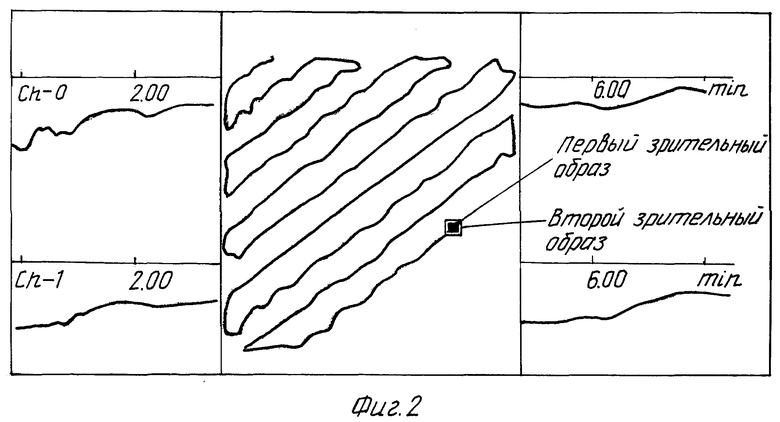
С помощью процессора 8 предварительно формируют перед испытуемым оператором первый зрительный образ M1(x1,y1) в динамическом режиме на дисплее 9. Затем с помощью сенсоров (датчиков давления 1, 2) оператор бимануально формирует второй управляемый зрительный образ M2(x2,y2) и манипулирует его положением относительно первого до их совпадения. При этом управляемые сигналы M2(x2, y2) с датчиков 1, 2 поступают на предварительные усилители 3, 4, а затем через усилители 5, 6 непосредственно поступают на АЦП 7 с коммутатором. На выходах усилителей 5, 6 выделяется тремор, а на выходе усилителей 3, 4 - биомеханические параметры оператора, которые поступают на вход АЦП 7, обрабатываются и направляются в процессор 8 для сравнения с параметрами первого зрительного образа M1(x1,y1).
По результатам сравнения первого и второго зрительных образов с учетом биомеханических параметров (скользящее среднее значение степени несовпадения координат двух зрительных образов вдоль траектории, скользящее среднее значение времени поисковых движений, скользящее среднее значение коэффициента рассогласования координации двигательных актов) и тремора (спектральные характеристики в динамике выполнения задания), процессором 8 формируется динамическая характеристика устойчивости психофизиологических функций, позволяющая объективно регистрировать ее изменения в динамике функционального состояния оператора.
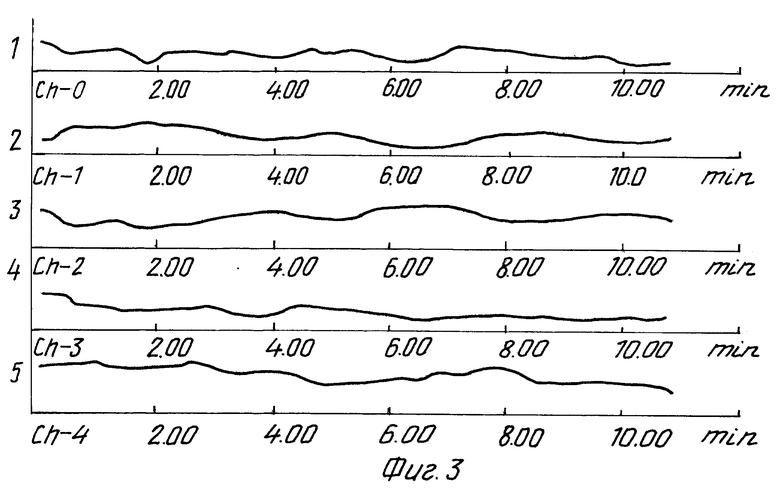
Пример конкретной реализации способа реализован по схеме, представленной на фиг. 1. В качестве кнопочных датчиков давления 1, 2 использовались индуктивные преобразователи перемещения, предварительные усилители 3, 4 были собраны на INA118, усилители переменного тока 5, 6 собраны на 140УД17, в качестве АЦП с коммутатором 7 - 572ПВ4, в качестве процессора 8 с дисплеем 9 - IBM PC. Характер первого и второго зрительных образов представлены на дисплее (фиг. 2). Выполняя операции в последовательности, представленной в формуле изобретения, получают в результате выполнения теста (фиг. 2) следующие результаты сравнения первого и второго зрительных образов с учетом биомеханических параметров (фиг. 3):
1. динамика среднего значения степени несовпадения координат двух зрительных образов вдоль траектории;
2. динамика среднего значения времени поисковых движений;
3. динамика среднего значения коэффициента рассогласования координации двигательных актов;
4. динамика спектральных характеристик тремора;
5. динамическая характеристика устойчивости психофизиологических функций.
Таким образом, в результате внедрения изобретения появилась возможность регистрации параметров устойчивости психофизиологических функций оператора в динамике его функционального состояния. Чем достигается поставленный технический результат.
Источники информации, принятые во внимание при составлении материалов заявки
1. Авторское свидетельство СССР N952213, кл. A 61 B 5/10, 1982.
2. В.П.Гребняк, И.П.Жученко, В.П.Бебых. Приборы для исследования устойчивости психофизиологических функций операторов. Вопросы психологии, 1985, N5, с.158-161-прототип.
| название | год | авторы | номер документа |
|---|---|---|---|
| СТАБИЛЛОПЛАТФОРМА ДЛЯ ИЗМЕРЕНИЯ ПАРАМЕТРОВ МИКРОДВИЖЕНИЙ БИОЛОГИЧЕСКОЙ ТКАНИ ОБЪЕКТА И СПОСОБ ЕЕ ИЗГОТОВЛЕНИЯ | 1996 |
|
RU2119295C1 |
| СПОСОБ ВОЗДЕЙСТВИЯ НА ПСИХОФИЗИОЛОГИЧЕСКОЕ СОСТОЯНИЕ ЧЕЛОВЕКА | 2001 |
|
RU2213518C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПРОФЕССИОНАЛЬНОЙ ПРИГОДНОСТИ ОПЕРАТОРА ТЕХНИЧЕСКИХ СРЕДСТВ ПРОИЗВОДСТВА | 2004 |
|
RU2275856C1 |
| Устройство для профессионального отбора и обучения операторов систем слежения | 2016 |
|
RU2638410C1 |
| Устройство для исследования способности вероятностного прогнозирования человека | 1987 |
|
SU1507330A1 |
| СПОСОБ КОЛИЧЕСТВЕННОГО ИНСТРУМЕНТАЛЬНОГО АНАЛИЗА ИНФРАКРАСНОЙ КОМПОНЕНТЫ БИОПОЛЯ ЧЕЛОВЕКА | 2001 |
|
RU2214163C2 |
| СПОСОБ ВОССТАНОВЛЕНИЯ ДВИГАТЕЛЬНОЙ АКТИВНОСТИ И ПОЗНАВАТЕЛЬНОЙ ДЕЯТЕЛЬНОСТИ ДЕТЕЙ НА РАННЕЙ СТАДИИ РЕАБИЛИТАЦИИ ТЯЖЕЛОЙ ЧЕРЕПНО-МОЗГОВОЙ ТРАВМЫ | 2009 |
|
RU2428161C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПРОФЕССИОНАЛЬНОЙ НАДЕЖНОСТИ СПЕЦИАЛИСТА ЭКСТРЕМАЛЬНОГО ПРОФИЛЯ ДЕЯТЕЛЬНОСТИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2392860C1 |
| УСТРОЙСТВО ДЛЯ ОЦЕНКИ ОПЕРАТОРСКОЙ ДЕЯТЕЛЬНОСТИ | 1997 |
|
RU2127547C1 |
| Способ оценки функциональной готовности оператора к деятельности, обеспечиваемой мелкой моторикой пальцев руки | 2022 |
|
RU2798899C1 |
Изобретение относится к медицинской технике и может быть использовано для оценки произвольного внимания и координации двигательных актов при профессиональном отборе операторов. С помощью процессора на экране дисплея формируют первый зрительный образ. Затем с помощью двух сенсоров, выполненных, например, в виде датчиков давления, формируют второй зрительный образ, манипулирование которым оператор осуществляет бимануально до их совпадения. По степени совпадения зрительных образов определяют устойчивость психофизиологических функций. Способ позволяет определять устойчивость психофизиологических функций оператора при изменении его функционального состояния. 1 з.п. ф-лы, 3 ил.
| Гребняк В.П | |||
| и др | |||
| Приборы для исследования устойчивости психофизиологических функций операторов | |||
| - Вопросы психологии, 1985, 5, с | |||
| Система механической тяги | 1919 |
|
SU158A1 |
