Предлагаемое изобретение относится к военной технике, точнее к средствам для профессионального отбора и начального обучения операторов управляемого вооружения, например операторов систем слежения противотанковых ракетных комплексов (ПТРК), наводчиков танковых управляемых ракет (ТУР), операторов зенитных ракетно-пушечных комплексов (ЗРПК) и др., основой деятельности которых является наведение управляемого снаряда на цель с помощью двухкоординатного органа управления и удержание трассера ракеты на цели до окончания полетного времени ракеты.
Как известно (см., например, Основы инженерной психологии: Учебник для технических Вузов / Под ред. Б.Ф. Ломова.- М.: Высшая школа, 1986.), на начальных стадиях обучения работе в системах слежения образование двигательного навыка происходит под контролем зрения; впоследствии же этот контроль все более переходит к чувствительным приборам двигательного аппарата - к тактильному и кинестетическому анализаторам. При этом образуется внутренний контур регулирования, определяемый действием этих анализаторов, в котором сигналы проходят значительно быстрее (0,4 с), чем по внешнему контуру регулирования, включающему зрительный контроль (1-2 с). Это важное свойство может быть использовано также для повышения качества управления путем подачи сигналов обратной связи не на зрительный, а непосредственно на тактильный анализатор. По этому же каналу можно вводить различные помехи, имеющие место в реальных системах управления (удары, толчки, вибрации, изменения мышечных нагрузок) и оказывающие значительное влияние на качество управления.
Двигательные характеристики включены во все виды деятельности и свидетельствуют о реальных потенциалах, ресурсах и резервах не только конкретного органа, но и организма в целом. В частности, для профессионального отбора операторов систем слежения и организации процесса их обучения в условиях внешних динамических воздействий важно знать такие характеристики их двигательной сферы, как тремор, антиципация (предвидение, предвосхищение), реакции (простая сенсомоторная, реакция выбора, реакция на движущий объект), мышечная выносливость, дифференцированность мышечного напряжения и др. профессионально-важные качества, определяющие особенности динамической адаптации в задачах компенсаторного и преследующего слежения. При этом при профотборе желательно все требуемые характеристики определять на одном рабочем месте, а при обучении развивать требуемые профессионально важные качества в условиях, максимально приближенных к реальным.
Сложившиеся к настоящему времени методы исследования психомоторики, как правило, используют аппаратные средства для оценки отдельных характеристик опорно-двигательного аппарата и аппарата рабочих движений рук с обратной связью через зрительный анализатор (см., например, Практикум по возрастной психологии:/ Под ред. Л.А. Головей, Е.Ф. Рыбалко. - СПб.: Речь, 2001).
Их общим недостатком является ограниченность применения (каждое средство измеряет только ту характеристику, для которой оно предназначено). Кроме того, даже при использовании всего набора таких средств невозможно оценить особенности динамической адаптации оператора при решении задач компенсаторного и преследующего слежения, тем более в условиях, максимально приближенных к реальным.
Оценку особенностей адаптации к динамическим нагрузкам в условиях, приближенных к реальным, можно проводить на тренажере, имитирующем реальную систему управления, в состав которого включен компьютер. Например, для этих целей может быть использовано устройство для профессионального отбора и обучения операторов систем слежения, содержащее последовательно соединенные блок моделирования реальных процессов и блок отображения информации, имитатор рабочего места оператора с пультом оператора, блоком имитации динамических нагрузок и имитатором механизма пуска, подключенным к блоку моделирования реальных процессов, выполненному на базе персонального компьютера (см. патент РФ №49326 от 15.07.2004 Устройство для профессионального отбора и обучения операторов систем слежения) - наиболее близкое к предлагаемому техническое решение, которое авторами рассматривается как ближайший аналог.
Устройство успешно используется в составе тренажеров для подготовки расчетов ЗРПК «Панцирь-С» 9Ф676-1 и 9Ф676-2 более 10 лет. Опыт его эксплуатации выявил существенный недостаток в начальной подготовке кандидатов в операторы, требующий обязательного «доучивания» на реальном комплексе вооружения для динамической адаптации оператора к особенностям законов управления конкретных образцов комплексов вооружения. Эти особенности объясняются значительным разбросом выходных характеристик датчиков команд, применяемых в современных комплексах управляемого вооружения, причем время адаптации тем больше, чем значительнее отличия динамики контура управления комплекса «Панцирь-С» от имитируемого в тренажере, прежде всего по чувствительности и крутизне команд наведения.
Практически во всех принятых на снабжение комплексах управляемого вооружения специалистами отмечается значительный разброс технических характеристик приводов как после изготовления, так и, особенно, в процессе износа при эксплуатации, к чему операторы оказываются неготовыми. Динамические стереотипы, выработанные в процессе подготовки на тренажерах со строго фиксированной динамикой контура управления (так называемая «мускульная память»), становятся тормозом для быстрой адаптации к реальным пультам управления с отличными от тренажерных техническими характеристиками).
С помощью устройства по патенту РФ №49326 от 15.07.2004 задача формирования у обучаемых гибких, легко трансформируемых навыков управления в отличающихся друг от друга по ряду технических характеристик контурах управления не может быть решена в полном объеме из-за отсутствия возможности варьирования характеристик пультов оператора, критичных по времени динамической адаптации к особенностям пультов (появление люфтов в механических передачах, изменение жесткости пружин возвратных механизмов и др.), так как используемый в нем блок имитации динамических нагрузок, выполненный в виде противовеса в форме кулачка и воздействующего на него по специальной программе электромагнита, создает только периодические кратковременные помехи (толчки) внутреннему контуру регулирования.
Перед авторами стояла задача создать устройство, обеспечивающее достаточно большой разброс параметров динамики пультов управления, критичных по времени динамической адаптации оператора к особенностям пультов управления, используемых в реальных комплексах вооружения, особенно с частично выработанным ресурсом.
Поставленная задача решена за счет того, что в известное устройство для профессионального отбора и обучения операторов систем слежения по патенту РФ №49326 от 15.07.2004, содержащее блок моделирования реальных процессов, блок отображения информации и имитатор рабочего места оператора с пультом оператора, имитатором механизма пуска и блоком имитации динамических нагрузок, введен блок формирования отклонений от заданных законов управления, причем блок моделирования реальных процессов, блок отображения информации, пульт оператора, имитатор механизма пуска, блок имитации динамических нагрузок и блок формирования отклонений от заданных законов управления объединены в локальную вычислительную сеть (ЛВС) с помощью коммутатора ЛВС.
Блок формирования отклонений от заданных законов управления содержит потенциометрические датчики команд, усилители-адаптеры, аналого-цифровые преобразователи(АЦП) и мультиплексоры по каждому из двух каналов управления, а также мини-ЭВМ, подключенную к коммутатору ЛВС своими первыми входом и выходом, причем входы усилителей-адаптеров подключены к потенциометрическому датчику команд, первые их выходы соединены с соответствующими первыми входами АЦП, вторые выходы - соответственно со вторыми входами АЦП, первым и вторым входами мультиплексора и вторым и третьим входами мини-ЭВМ, третий вход мультиплексора подключен к выходам АЦП, а выход - к четвертому входу мини-ЭВМ, при этом третьи входы АЦП подключены к шине управления законом преобразования, связанной со вторым выходом мини-ЭВМ.
Предлагаемое устройство для профессионального отбора и обучения операторов систем слежения обладает совокупностью существенных признаков, не известных из уровня техники для изделий подобного назначения, что позволяет сделать вывод о соответствии критерию «новизна» для изобретения.
Заявляемое устройство, по мнению заявителя и авторов, соответствует критерию «изобретательский уровень», т.к. он явным образом не следует из уровня техники, т.е. не известен из доступных источников научной, технической и патентной информации на дату подачи заявки.
Сущность предлагаемого изобретения поясняется с помощью чертежей, где:
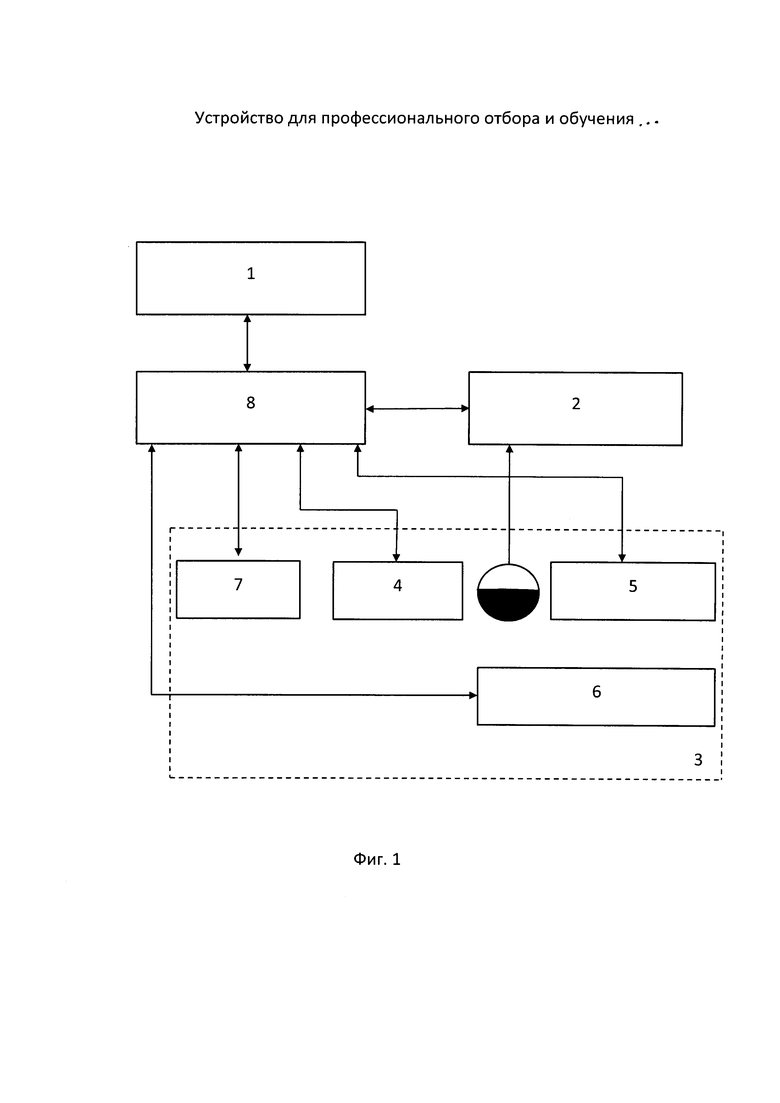
- на фиг. 1 представлена структурная схема устройства;
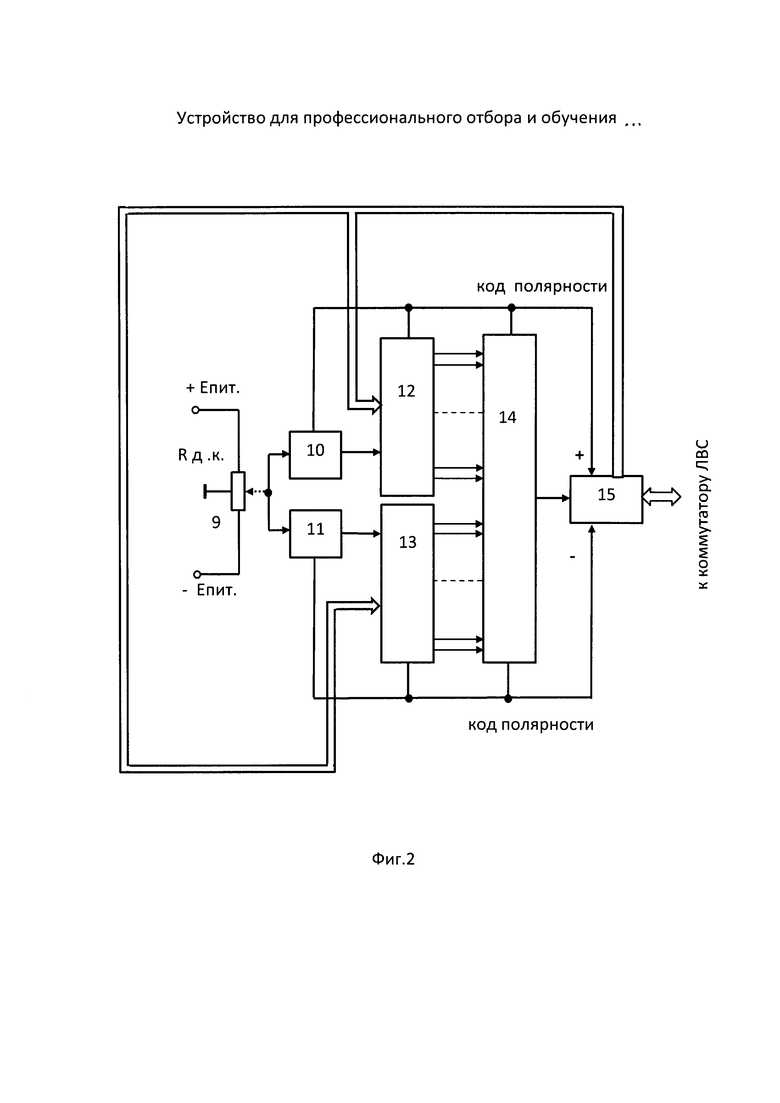
- на фиг. 2 - функциональная схема блока формирования отклонений от заданных законов управления по одному из каналов;
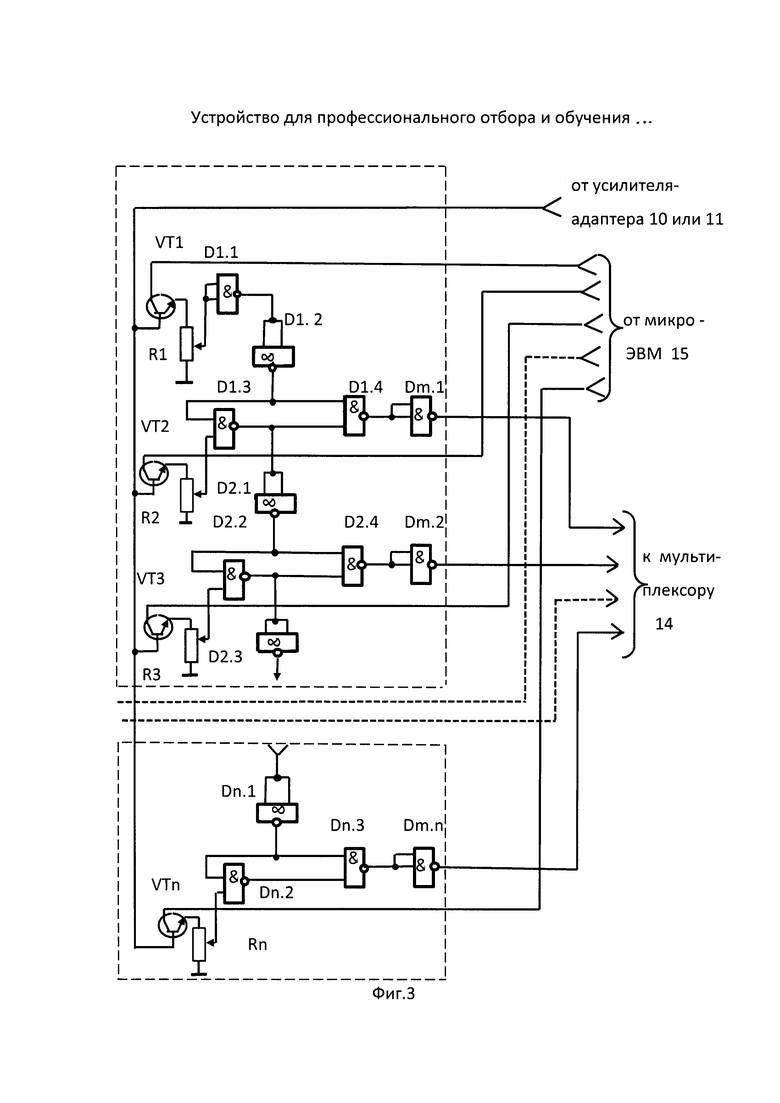
- на фиг. 3 - функциональная схема аналого-цифрового преобразователя канала Y;
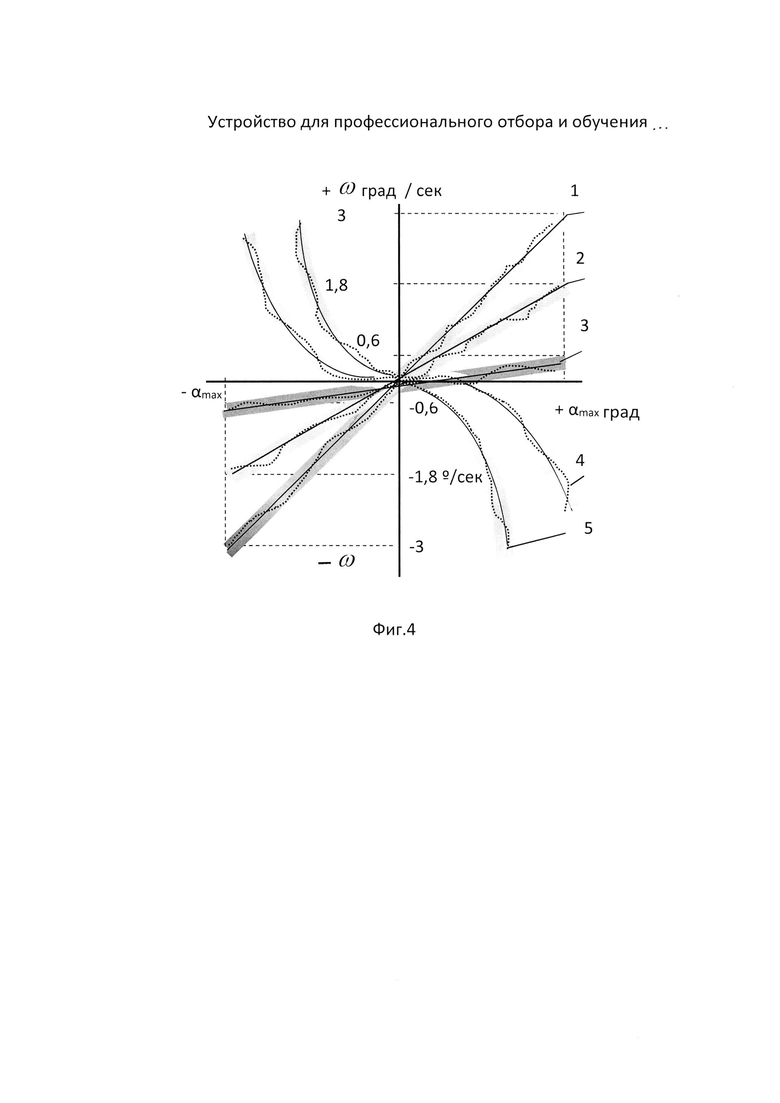
- на фиг. 4 - возможные законы управления датчиков команд типа «кнюппель» изделия 9П148 по каналам X (кривые 1, 2) и Y (кривая 3) и типа «танковая колонка» по каналу X изделий 9К116 и 9К119 (кривые 4 и 5 соответственно), где по оси абсцисс отражены углы отворотов поворотных механизмов датчиков команд, а по оси ординат угловые скорости системы наведения вооружения.
Предлагаемое устройство (фиг. 1) содержит блок 1 моделирования реальных процессов, блок 2 отображения информации и имитатор 3 рабочего места оператора с пультом 4 оператора, имитатором 5 механизма пуска и блоком 6 имитации динамических нагрузок и дополнительно введенный блок 7 формирования отклонений от заданных законов управления, причем блок 1 моделирования реальных процессов, блок 2 отображения информации, пульт 4 оператора, имитатор 5 механизма пуска, блок 6 имитации динамических нагрузок и блок 7 формирования отклонений от заданных законов управления объединены в локальную вычислительную сеть (ЛВС) с помощью коммутатора ЛВС 8.
Блок 7 формирования отклонений от заданных законов управления (фиг. 2) содержит потенциометрические датчики 9 команд, усилители-адаптеры 10 и 11, аналого-цифровые преобразователи 12 и 13 (АЦП) и мультиплексоры 14 по каждому из двух каналов управления, а также мини-ЭВМ 15, подключенную к коммутатору ЛВС 8 своими первыми входом и выходом, причем входы усилителей-адаптеров 10 и 11 подключены к потенциометрическому датчику 9 команд, первые их выходы соединены с соответствующими первыми входами АЦП 12 и 13, вторые выходы - соответственно со вторыми входами АЦП 12 и 13, первым и вторым входами мультиплексора 14 и вторым и третьим входами мини-ЭВМ 15, третий вход мультиплексора 14 подключен к выходам АЦП 12 и 13, а выход - к четвертому входу мини-ЭВМ 15, при этом третьи входы АЦП 12 и 13 подключены к шине управления законом преобразования, связанной со вторым выходом мини-ЭВМ 15.
Потенциометрический датчик 9 команд представляет собой устройство с двумя переменными проволочными резисторами и отводами от средней точки для подключения общего провода при работе от источников двухполярного напряжения Uпит., общий, Uпит. (см. например, изделие 1Э52 боевой машины БМП-3 или блок УТН-10 тренажера 9Ф660-3 для подготовки операторов ПТРК «Конкурс-М»).
Усилители-адаптеры 10 и 11, формирующие размах напряжений потенциометрических датчиков для обеспечения требуемых значений импендансных связей с аналого-цифровыми преобразователями, в том числе по полярности преобразуемых напряжений, могут быть выполнены, например, на базе операционных усилителей 140 УД 14.
Каждый из аналого-цифровых преобразователей 12 и 13 (фиг. 3) содержит:
- ключевые схемы управления съемом сигналов с усилителей-адаптеров, выполненные на транзисторах VT1-VTn (типа 2Т3102А,Б) и переменных резисторах R1-Rn (типа СП3-39, СП5-22, СП5-28Б);
- ячейки разрядов АЦП, выполненные на базе 4-элементных схем 2И-НЕ серий 134 ЛБ1А, 176ЛА7, 561ЛА7.
Мультиплексор 14, обеспечивающий преобразование параллельного кода в последовательный, может быть выполнен, например, на базе микросхемы К155 КП 1.
Устройство для профессионального отбора и обучения операторов систем слежения работает следующим образом.
Перед выполнением обучаемым оператором учебно-тренировочной задачи (УТЗ) инструктор устанавливает один из возможных вариантов технических характеристик имитируемого органа управления, отраженных на фиг. 4, где по оси абсцисс отложены углы отворота датчика команд от нормали, а по оси ординат - соответствующие им угловые скорости наведения прицельной марки на цель. Как видно из чертежа, при наличии механических люфтов и изменениях жесткости пружин возвратных механизмов датчиков команд их выходные характеристики могут заметно отличаться друг от друга, а следовательно, будут изменяться и точностные характеристики наведения прицельных марок на цель.
Как правило, вначале выбирается предусмотренный разработчиками «идеальный» закон управления для данного комплекса вооружения, изображенный на фиг. 4 основной линией. Затем, после устойчивого выполнения обучаемым ряда УТЗ и приобретения навыков двухкоординатного сопровождения сложно движущейся цели, инструктор задает новые варианты технических характеристик «изношенного» органа управления, предусмотренные программным обеспечением мини-ЭВМ, последовательно увеличивая разброс параметров, критичных по времени динамической адаптации оператора к особенностям пультов управления, используемых в реальных комплексах вооружения. Обучаемый оператор, выполняя серии УТЗ с различными техническими характеристиками имитируемого органа управления, вынужден постоянно контролировать качество наведения с помощью зрительного анализатора, что требует постоянного внимания и тем самым создает дополнительное психическое напряжение при выполнении тренировочных заданий, более характерное для стрессогенных ситуаций боевой работы, что, несомненно, положительно скажется в последующей реальной деятельности.
При этом на вновь введенный блок 7 формирования отклонений от заданных законов управления с пульта 4 оператора (например, по каналу X) электрический сигнал положительной или отрицательной полярности поступает на соответствующий усилитель-адаптер (10 или 11), где он преобразуется до уровня напряжения, достаточного для открытия ключевых схем управления, и поступает на АЦП 12 и 13. Одновременно по шине управления законом преобразования на эти АЦП подаются коллекторные напряжения от мини-ЭВМ 15 для транзисторов VT1-VTn.
При высокоимпендансном совпадении сигналов на базах и коллекторах транзисторов VT1-VTn происходит их открытие, а следовательно, передача с переменных резисторов R1-Rn на входы логических микросхем уровней логической единицы. Таким образом, параллельный АЦП, содержащий группу электронных ключей, число которых равно разрядности кода, преобразует аналоговое напряжение в цифровой код (за счет групп логических схем И-НЕ, работающих по принципу сдвигового регистра, передающего высокоимпендансное состояние от младшего разряда к старшему, причем каждая группа логических схем сдвигового регистра соединяется с шиной данных мини-ЭВМ 15, которая осуществляет формирование закона преобразования датчика команд.
С учетом того, что блок 7 формирования отклонений от заданных законов управления представляет импульсные сигналы различной запрограммированной скважности, длительность которых характеризует амплитуду преобразования потенциометрического датчика 9 команд, с мультиплексора 14 (преобразователя параллельного кода в последовательный) к коммутатору 8 ЛВС будет следовать последовательная группа сигналов различной скважности в зависимости от угла отворота потенциометрического датчика 9 команд. Одной из основных задач мини-ЭВМ 15 является преобразование сигналов с изменяемой скважностью в кодовые значения напряжения управления команд наведения прицельной марки прибора наведения тренажера (на чертежах не показан).
Технический результат достигается за счет того, что при выполнении серии задач отслеживания сложно движущейся цели в режимах компенсаторного и преследующего слежения при различных динамических воздействиях и изменяющихся законах управления ракетой оператор, преодолевая помехи во внутреннем контуре регулирования, пробует различные варианты решения задачи поражения цели, выбирая оптимальную для себя стратегию управления, формируя тем самым оптимальный для себя стиль деятельности в изменяющихся от задачи к задаче технических характеристиках контура управления. Таким образом за счет введения в контур управления предлагаемого устройства для профессионального отбора и обучения перестраиваемого датчика команд, позволяющего обеспечить контролируемые изменения отдельных технических характеристик контура управления, критичных по времени динамической адаптации оператора к особенностям пультов управления, используемых в реальных комплексах вооружения, получаемые операторами навыки управления будут существенно более гибкими, что обеспечит снижение временных затрат на динамическую адаптацию в случае появления подобных ситуаций в реальной деятельности, а следовательно, сократит время его «доучивания» на конкретном образце комплекса вооружения, что, с одной стороны, снизит стоимость подготовки, с другой - сохранит технический ресурс комплекса.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для профессионального отбора и начального обучения операторов систем слежения | 2016 |
|
RU2646395C1 |
| ТРЕНАЖЕР ДЛЯ ОБУЧЕНИЯ ЛЕТЧИКОВ ПИЛОТИРОВАНИЮ УДАРНОГО ВЕРТОЛЕТА И ПРИМЕНЕНИЮ АВИАЦИОННЫХ СРЕДСТВ ПОРАЖЕНИЯ | 2008 |
|
RU2367026C1 |
| Тренажер-манипулятор для подготовки операторов комплексов вооружения | 2016 |
|
RU2641612C2 |
| ТРЕНАЖЕР ОПЕРАТОРОВ ПУШЕЧНО-РАКЕТНОГО ВООРУЖЕНИЯ | 2011 |
|
RU2465534C1 |
| Тренажер для отработки навыков взаимодействия операторов средств ближнего боя | 2015 |
|
RU2671460C1 |
| АВТОМАТИЗИРОВАННЫЙ ТРЕНАЖЕРНЫЙ КОМПЛЕКС ДЛЯ ПОДГОТОВКИ ЭКИПАЖЕЙ КОРАБЛЕЙ | 2003 |
|
RU2234138C1 |
| СПОСОБ ТЕХНИЧЕСКОГО КОНТРОЛЯ И ДИАГНОСТИРОВАНИЯ БОРТОВЫХ СИСТЕМ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА С ПОДДЕРЖКОЙ ПРИНЯТИЯ РЕШЕНИЙ И КОМПЛЕКС КОНТРОЛЬНО-ПРОВЕРОЧНОЙ АППАРАТУРЫ С ИНТЕЛЛЕКТУАЛЬНОЙ СИСТЕМОЙ ПОДДЕРЖКИ ПРИНЯТИЯ РЕШЕНИЙ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2557771C1 |
| Тренажер для подготовки операторов ПТРК с комбинированной системой наведения | 2018 |
|
RU2692024C1 |
| УЧЕБНЫЙ ТРЕНАЖЕР БОЕВЫХ РАСЧЕТОВ ЗЕНИТНО-РАКЕТНОГО КОМПЛЕКСА | 2022 |
|
RU2787411C1 |
| ТРЕНАЖЕР ДЛЯ ПОДГОТОВКИ МЕХАНИКОВ-ВОДИТЕЛЕЙ ПОДВИЖНЫХ КОМПЛЕКСОВ ВООРУЖЕНИЯ | 2019 |
|
RU2711047C1 |
Изобретение относится к военной технике, а именно к средствам для профессионального отбора и начального обучения операторов управляемого вооружения. Устройство содержит блок моделирования реальных процессов, блок отображения информации и имитатор рабочего места оператора с пультом оператора, имитатором механизма пуска и блоком имитации динамических нагрузок и блок формирования отклонений от заданных законов управления. Блок моделирования реальных процессов, блок отображения информации, пульт оператора, имитатор механизма пуска, блок имитации динамических нагрузок и блок формирования отклонений от заданных законов управления объединены в локальную вычислительную сеть (ЛВС) с помощью коммутатора ЛВС. Техническим результатом является обеспечение достаточно большого разброса параметров динамики пультов управления, критичных по времени динамической адаптации оператора к особенностям пультов управления, используемых в реальных комплексах вооружения. 1 з.п. ф-лы, 4 ил.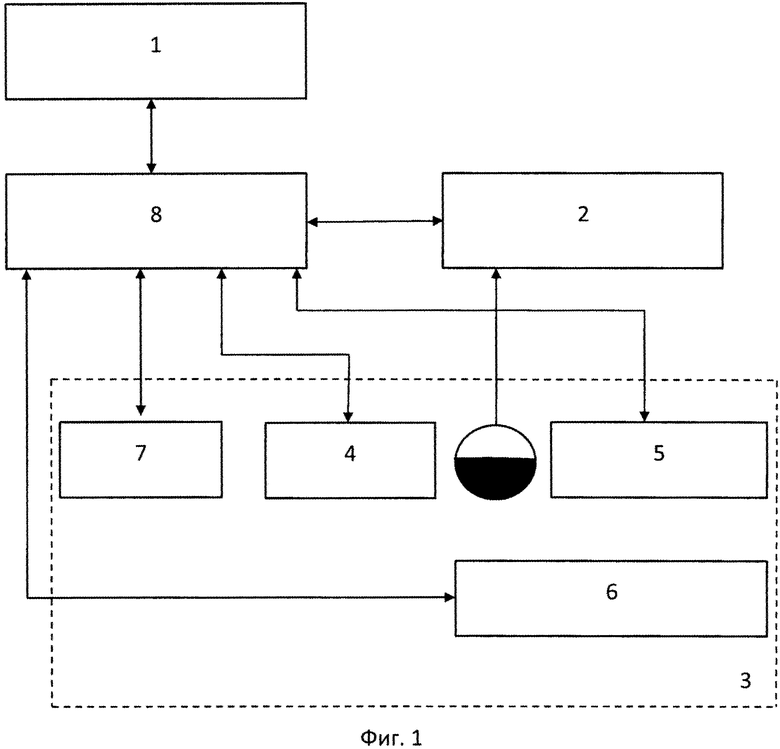
1. Устройство для профессионального отбора и обучения операторов систем слежения, содержащее блок моделирования реальных процессов, блок отображения информации и имитатор рабочего места оператора с пультом оператора, имитатором механизма пуска и блоком имитации динамических нагрузок, отличающееся тем, что в него дополнительно введен блок формирования отклонений от заданных законов управления, причем блок моделирования реальных процессов, блок отображения информации, пульт оператора, имитатор механизма пуска, блок имитации динамических нагрузок и блок формирования отклонений от заданных законов управления объединены в локальную вычислительную сеть ЛВС с помощью коммутатора локальной вычислительной сети.
2. Устройство по п. 1, отличающееся тем, что блок формирования отклонений от заданных законов управления содержит потенциометрические датчики команд, усилители-адаптеры, аналого-цифровые преобразователи (АЦП) и мультиплексоры по каждому из двух каналов управления, а также мини-ЭВМ, соединенную с коммутатором локальной вычислительной сети своими первыми входом и выходом, причем входы усилителей-адаптеров подключены к потенциометрическому датчику команд, первые их выходы соединены с соответствующими первыми входами АЦП, вторые выходы - соответственно со вторыми входами АЦП, первым и вторым входами мультиплексора и вторым и третьим входами мини-ЭВМ, третий вход мультиплексора подключен к выходам АЦП, а выход - к четвертому входу мини-ЭВМ, при этом третьи входы АЦП подключены к шине управления законом преобразования, связанной со вторым выходом мини-ЭВМ.
| Прибор для измерения количества сильно загрязненной жидкости, например, гидромассы | 1936 |
|
SU49326A1 |
| 0 |
|
SU160851A1 | |
| US 20150072322 A1, 12.03.2015 | |||
| US 6604064 B1, 05.08.2003. | |||

