Изобретение относится к области космической техники и может быть использовано для очистки космического пространства от частиц крупного мусора, таких как фрагменты и обломки космических аппаратов размером от нескольких сантиметров и больше, а также самих нефункционирующих пассивных космических аппаратов.
Известен аппарат для сбора и переработки космического мусора, содержащий в своем составе двигательную установку на основе жидкостного ракетного двигателя большой тяги, систему управления, систему захвата частиц мусора на основе автоматического манипулятора и систему фиксации и хранения собранных объектов [1].
Основной недостаток аппаратов данного типа состоит в том, что используемая в них двигательная установка основана на ракетных двигателях большой тяги, которые хотя и позволяют эффективно осуществлять маневры по сближению с захватываемым объектом, но в тоже время обладают низким удельным импульсом, что приводит к большим затратам топлива на единицу потребной характеристической скорости.
В качестве прототипа может быть взят аппарат для очистки космического пространства от пассивных KA и их фрагментов на основе электроракетного транспортного аппарата, содержащего энергетическую установку (например, солнечную или ядерную), систему хранения и подачи рабочего тела, электроракетные двигатели, систему управления, двигательную систему ориентации и маневрирования, на основе двигателей большой тяги, путем добавления системы фиксация и хранения собранных объектов космического мусора, а также системы их захвата. Технический облик такого электроракетного транспортного аппарата на основе ядерной термоэмиссионной установки представлен в работе [2].
Такой аппарат с электроракетными двигателями, обладающими высоким удельным импульсом, обладает значительно большим запасом характеристической скорости, что позволяет в принципе собрать гораздо больше крупного космического мусора, однако ввиду того, что такой аппарат обладает большей массой по сравнению с аналогичным KA на основе двигателей большой тяги и двигателями малой тяги, то на участке сближения и захвата пассивного KA требуется применение двигателей большой тяги, которые, как правило, обладают гораздо меньшим удельным импульсом, что приводит к значительным затратам топлива и снижает эффективность применения злектроракетных двигателей.
Сущность изобретения заключается в том, что космический аппарат для очистки космоса от пассивных KA и их фрагментов, содержащий энергетическую установку, электроракетные двигатели, систему хранения и подачи рабочего тела, приборно-агрегатный отсек с системой управления, систему фиксации и хранения крупных объектов космического мусора, автоматический манипулятор, систему ориентации и сближения на основе ракетных двигателей большой тяги, снабжен автономным космическим аппаратом с системой управления, системой фиксации пассивных космических аппаратов и узлами стыковки, взаимодействующими с соответствующими узлами стыковки основного аппарата, а манипулятор и система ориентации и сближения на основе ракетных двигателей большой тяги размещены на автономном космическом аппарате, соединенным тросовой системой с основным космическим аппаратом.
Техническим результатом, достигаемым с помощью заявленного изобретения, является повышение эффективности космического аппарата по сбору крупных объектов космического мусора за счет снижения расхода топлива на этапе сближения и захвата удаляемого объекта, так как эту операцию осуществляет только автономный аппарат, а также за счет использования тросовой системы.
На чертеже представлен общий вид космического аппарата для очистки космоса от пассивных KA и их фрагментов, состоящего из основного KA и автономного KA.
В состав основного KA входят: ядерная энергетическая установка 1, которая обеспечивает питание электроэнергией электроракетных двигателей и служебных систем аппарата, раздвижная ферма 2, раздвижные штанги с электроракетными двигателями 3, система хранения и подачи рабочего тела 4, приборно-агрегатный отсек 5, включающий различные служебные системы, в том числе и систему управления, устройство фиксации и хранения 6 собранных пассивных KA и их фрагментов 7, стыковочный узел 8, тросовую систему 9 с тросом 10 и систему автоматической стыковки 11.
В состав автономного KA входят: стыковочный узел 12, топливные баки 13, приборный отсек 14 с системой управления и другими служебными системами, устройства фиксации 15, захваченного пассивного KA или его фрагмента 16, автоматический манипулятор 17, ракетные двигатели большой тяги 18, система автоматической стыковки 19.
Автономный KA соединен с основным KA тросом 10 тросовой системы 9.
Предложенный космический аппарат для очистки космоса от пассивных KA и их фрагментов работает следующим образом.
Аппарат доставляется на начальную орбиту с помощью ракеты-носителя и разгонного блока на основе ракетного двигателя большой тяги. После этого происходит раздвижение фермы 2 с ядерной энергетической установкой 1 и развертывание штанг с электроракетными двигателями 3. Затем происходит включение энергоустановки 1 и весь аппарат совершает перелет с помощью электроракетных двигателей 3 на орбиту, близкую к орбите подлежащего удалению объекта, и совершает дальнее сближение с объектом до расстояния от нескольких километров до нескольких сотен метров. После чего происходит отстыковка автономного KA от основного KA и его автономное сближение с удаляемым объектом с помощью ракетных двигателей большой тяги 18. После сближения с удаляемым объектом автономный KA осуществляет захват этого объекта 16 автоматическим манипулятором 17 и осуществляет фиксацию его в устройстве фиксации 15. После этого автономный KA осуществляет обратный перелет к основному KA и осуществляет с ним автоматическую стыковку с помощью систем автоматической стыковки 11 и 19 и стыковочных узлов 8 и 12. Если относительные скорости удаляемого объекта и основного KA не превышают значений порядка 10...20 м/с, то автономный KA осуществляет сближение и захват удаляемого объекта, будучи соединенным с основным KA тросом 10 тросовой системы 9. В этом случае после осуществления захвата и фиксации удаляемого объекта 16 в устройстве фиксации 15 происходит выравнивание скоростей основного KA и автономного KA за счет регулирования скорости разматывания троса 10 тросовой системы 9. Затем производится ориентация всей системы вдоль местной вертикали и осуществляется либо перевод удаляемого объекта на орбиту, гарантирующую его торможение в атмосфере, если позволяет высота орбиты системы и длина троса 10, путем отсоединения его от автономного KA, либо автономный KA подтягивается к основному KA путем сматывания троса 10 тросовой системой 9 и стыкуется с ним с помощью стыковочных узлов 8 и 12. После завершения стыковки захваченный объект 16 перегружается с помощью автоматического манипулятора 17 на устройство фиксации и хранения 6 основного KA, где объект фиксируется и хранится необходимое время.
Если подлежащий удалению пассивный KA находится на орбите со значительным эксцентриситетом и основной KA не может сформировать такую орбиту за приемлемое время, то удаление пассивного KA будет выглядеть следующим образом: основной KA формирует околокруговую орбиту высотой немного ниже (или выше) перицентра (апоцентра) орбиты удаляемого объекта, при этом разность высот выбирается из необходимой величины характеристической скорости для перехода автономного KA на элиптическую орбиту удаляемого объекта. После этого основной KA ориентируется вдоль местной вертикали, происходит расстыковка автономного KA с основным KA и их взаимное удаление вдоль местной вертикали за счет разматывания троса 10 тросовой системы 9 до тех пор, пока автономный KA не окажется в перицентре (апоцентре) орбиты удаляемого объекта. В момент прохождения удаляемого объекта через перицентр (апоцентр) происходит отцепление автономного KA от троса 9, и он осуществляет сближение с удаляемым объектом 16, его захват и фиксацию с помощью устройства фиксации 15. Затем автономный KA и основной KA осуществляют взаимное сближение и стыковку с помощью систем автоматической стыковки 11 и 19 и стыковочных узлов 8 и 12. После этого с подлежащим удалению грузом производятся операции, аналогичные описанным выше. Затем осуществляется перелет и дальнее сближение с другим пассивным KA или его фрагментом, подлежащим удалению, с помощью основного КА и все операции повторяются. После заполнения всего устройства фиксации и хранения 6 или выработки заданного ресурса аппарат осуществляет перелет с помощью электроракетных двигателей на заданную орбиту, например на низкую околоземную орбиту, где пущенные в свободный полет крупные объекты космического мусора могут быстро сойти с орбиты под действием земной атмосферы.
Таким образом достигается значительная экономии топлива при осуществлении операций по сближению с объектом космического мусора и его захвату.
Литература
1. Аппарат ASPOD для сбора объектов искусственного происхождения в космосе. Ракетная и космическая техника, N 51-52, от 29 декабря 1989 г., с. 21.
2. Агеев В.П., Быстров П.И., Масленников А.А., Синявский В.В., Юдицкий В. Д. , Электроядерный буксир в программе перспективных задач освоения космоса, Проблемы авиационной и космической техники, N2, 1994 г., с. 36-39.
Изобретение относится к космической технике и может быть использовано для очистки космического пространства от пассивных космических аппаратов (КА), их фрагментов и обломков. Согласно изобретению, КА для очистки космоса содержит энергодвигательную установку (предпочтительно ядерную с электроракетными двигателями) и ряд служебных систем. Кроме того, он снабжен системой фиксации и хранения крупных объектов космического мусора, а также автономным КА, соединенным с ним тросовой системой. Автономный КА маневрирует с помощью ракетных двигателей большой тяги и/или тросовой системы, сближаясь с удаляемыми объектами (мусором). После доставки последних на основной КА они перегружаются посредством автоматического манипулятора в указанную систему фиксации и хранения. Изобретение направлено на повышение эффективности очистки космического пространства путем снижения расхода топлива на этапах сближения и захвата удаляемых объектов. 1 ил.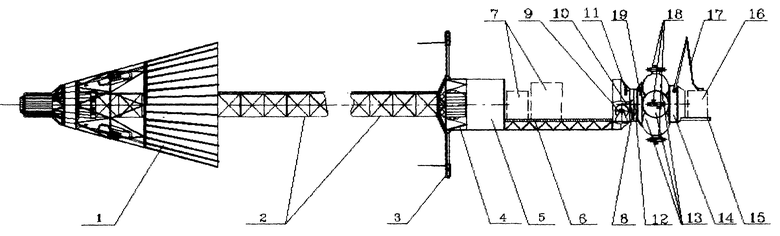
Космический аппарат для очистки космоса от пассивных КА и их фрагментов, содержащий энергетическую установку, электроракетные двигатели, систему хранения и подачи рабочего тела, приборно-агрегатный отсек с системой управления, систему фиксации и хранения крупных объектов космического мусора, автоматический манипулятор, систему ориентации и сближения на основе ракетных двигателей большой тяги, отличающийся тем, что снабжен автономным космическим аппаратом с системой управления, системой фиксации пассивных космических аппаратов и узлами стыковки, взаимодействующими с соответствующими узлами стыковки основного аппарата, а манипулятор и система ориентации и сближения на основе ракетных двигателей большой тяги размещены на автономном космическом аппарате, соединенном тросовой системой с основным космическим аппаратом.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Агеев В.П., Быстров П.И | |||
| и др | |||
| Электроядерный буксир в программе перспективных задач освоения космоса | |||
| Пробл.авиацион | |||
| и космич.техники, N 2, 1994, с.36 - 39 | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Аппарат ASPOD для сбора объектов искусственного происхождения в космосе | |||
| Ракетн | |||
| Способ запрессовки не выдержавших гидравлической пробы отливок | 1923 |
|
SU51A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Итоги науки и техники | |||
| Сер."Ракетн | |||
| и космич.техника" | |||
| Способ гальванического снятия позолоты с серебряных изделий без заметного изменения их формы | 1923 |
|
SU12A1 |
| - М.: ВИНИТИ, 1991, с.120 - 123 | |||
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
| КОСМИЧЕСКИЙ САЧОК | 1991 |
|
RU2046081C1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| КОСМИЧЕСКИЙ АППАРАТ ДЛЯ ОЧИСТКИ КОСМИЧЕСКОГО ПРОСТРАНСТВА ОТ МУСОРА | 1993 |
|
RU2092408C1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
| СПОСОБ ОЧИСТКИ ОКОЛОЗЕМНОГО КОСМИЧЕСКОГО ПРОСТРАНСТВА ОТ КОСМИЧЕСКИХ ОБЪЕКТОВ И МЕЛКИХ ЧАСТИЦ ПУТЕМ ИХ РАЗРУШЕНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1993 |
|
RU2092409C1 |
| и др.), 10.10.97. | |||
