Область техники
Изобретение относится к области управления положением в пространстве космических летательных аппаратов с использованием реактивной силы, создаваемой при лазерном испарении материала внеземного источника.
Уровень техники
Различные способы и устройства для перемещения объектов космического мусора предлагаются в большом числе патентов. Можно выделить больших 3 группы изобретений и полезных моделей:
1) для улавливания объектов (например, в патенте РФ RU 2141436);
2) для понижения орбиты с целью ускорения сгорания в атмосфере (например, в патенте РФ RU 2626788);
3) для увода на орбиты захоронения (например, в патенте США US 6655637).
Известен аналог - Космический аппарат (КА) для очистки космоса от пассивных КА и их фрагментов (патент РФ RU 2141436, МПК B64G 1/00, B64G 1/22, B64G 9/00, Опубликовано: 20.11.1999). В работе предлагается КА для очистки космоса, содержащий энергодвигательную установку (предпочтительно ядерную с электроракетными двигателями) и ряд вспомогательных систем. Кроме того, КА снабжен системой фиксации и хранения крупных объектов космического мусора, а также автономным КА, соединенным с ним тросовой системой. Автономный КА маневрирует с помощью ракетных двигателей большой тяги и/или тросовой системы, сближаясь с удаляемыми объектами (мусором). После доставки последних на основной КА они перегружаются посредством автоматического манипулятора в указанную систему фиксации и хранения.
Недостатком является то, что предлагается использовать хоть и экономичные, но обладающие малой тягой и громоздкие электроракетные двигатели, с использованием которых время выполнения миссии, а значит и производительность такого способа будут очень низкими.
Известен аналог - Спускаемый аппарат-буксир для снятия космических объектов с орбиты. (патент РФ RU 2626788, МПК B64G 1/62, Опубликовано: 01.08.2017 Бюл. №22). КА содержит грузовой контейнер, имеющий свободный объем для размещения снимаемого объекта, надувное тормозное устройство с гибкой герметичной термостойкой оболочкой, выполненной с возможностью приобретения аэродинамической формы при заполнении ее газом. При этом надувное тормозное устройство имеет внешние обводы в форме усеченного конуса и выполнено в виде набора элементов в форме тора. Также аппарат содержит устройство для захвата снимаемого объекта, систему навигации для поиска снимаемого с орбиты объекта и двигательную установку для маневрирования аппарата. Устройство для захвата снимаемого объекта выполнено в виде секторов усеченного конуса, а свободный объем для размещения снимаемого объекта - в виде конического раструба. Технический результат заключается в расширении арсенала космической техники путем введения простого спускаемого аппарата-буксира для оперативного снятия объектов с орбит искусственных спутников Земли.
Недостатком является то, что предлагаемый космический аппарат является одноразовым, а способ предусматривает только уничтожение объекта в атмосфере, но не увод на орбиту захоронения. Эффективность тормозного устройства имеет резкую обратную пропорциональность высоте орбиты удаляемого объекта, поэтому уже для солнечно-синхронных орбит (500…600 км) время удаления объекта будет сопоставимо с естественным сроком схода с орбиты.
Известен аналог - Spacecraft for removal of space orbital debris (Космический аппарат для удаления космического мусора) (патент США US 6655637, МПК B64G 1/00; B64G 1/10; B64G 1/24; B64G 1/64; (IPC1-7): В64С 1/62, Опубликовано 2003-12-02). Конструкция КА включает в себя захват, представляющий из себя гибкие надувные пальцы с петлевыми камерами для загибания надувных пальцев вокруг космического мусора с помощью двигателей и тросов натяжения, а также тормозящая для сведения с орбиты космического мусора либо солнечный парус или двигатель для перемещения мусора на орбиту захоронения. Для перемещения космического мусора не используется рабочее вещество, привезенное с Земли.
Однако тяга, создаваемая солнечным парусом, очень мала, поэтому длительное перемещение объекта со значительно возросшей площадью сечения может даже повысить вероятность столкновения с другими космическими аппаратами или объектами космического мусора.
Все эти предложения сводятся к удалению космического мусора, но не к его переработке. Учитывая, что в настоящее время стоимость вывода 1 кг полезной нагрузки на низкую околоземную орбиту сопоставима со стоимостью такой же массы золота, пренебрегать запасами потенциального рабочего вещества, уже имеющегося на околоземных орбитах нерационально. Кроме того, для межорбитальных маневров, полетов к Луне, Марсу и т.д. существенную часть полезной нагрузки составляет топливо.
Существенной проблемой на пути переработки космического мусора является отсутствие двигательных установок, которые могли бы использовать его в качестве топлива. Такими всеядные установки могут быть созданы с использованием мощных лазеров, сфокусированное излучение которых (при достаточной интенсивности) может испарить практически любое вещество и, в большинстве случаев, превратить его в плазму, температура которой обеспечивает среднемассовую скорость частиц, превышающую 1-ю космическую скорость.
Известен также аналог - стабилизация движения неустойчивых фрагментов космического мусора (патент РФ RU 2505461, МПК B64G 1/24, B64G 1/66, Опубликовано: 27.01.2014 Бюл. №3). Способ стабилизации движения указанных фрагментов включает приложение силы к фрагменту в его расчетных точках. Силу создают пневматическим воздействием на фрагмент газового факела, генерируемого с борга находящегося рядом спутника. Факел может создаваться устройствами типа реактивных двигателей разного рода. При этом возможно одновременное изменение орбиты фрагмента космического мусора.
Недостаток этого технического решения заключается в том, что для воздействия на космический мусор применяют реактивные струи, создаваемые космическим аппаратом за счет имеющихся на его борту запасов рабочего тела, что может быть отнесено к недостаткам, так как запасы эти ограничены, а стоимость удаления одного фрагмента космического мусора таким образом велика.
Раскрытие изобретения
Задачей предлагаемого объекта является устранение недостатков аналогов, а именно: использование космического мусора в качестве рабочего вещества для лазерной двигательной установки космического аппарата, и таким образом повышение технико-экономической эффективности перемещения космического мусора из потенциально опасных мест в места, безопасные для разных КА от возможных столкновений с космическим мусором (орбиты захоронения).
Для решения задачи предлагается способ перемещения объектов космического мусора с постепенным использованием его вещества в качестве рабочего тела реактивного движителя космическим аппаратом, оснащенным лазерной двигательной установкой и устройством, обеспечивающим сканирование поверхности произвольной формы. При этом космический аппарат жестко закрепляется на поверхности объекта космического мусора. Далее с использованием системы сканирования или другим доступным способом, производят картирование доступной поверхности объекта космического мусора. В результате анализа полученной карты создают рабочую программу сканирования поверхности для обеспечения максимального значения проекции на заданную ось механического импульса, возникающего при лазерном воздействии на поверхность объекта космического мусора. В соответствии с созданной рабочей программой производят сканирование поверхности силовым лазерным лучом для перемещения с постепенным уничтожением вещества объектов космического мусора. При этом параметры лазерного воздействия, а именно: энергию лазерных импульсов и размер пятна фокусировки лазерного луча - выбирают, исходя из химического состава вещества космического мусора.
Поскольку абляционный газоплазменный поток от используемого вещества объекта космического мусора распространяется по локальной нормали к участку поверхности, на которую осуществляется лазерное воздействие, и имеет полный угол раскрытия в вакууме примерно 15°, то в этом секторе расположением элементов исполнительного устройства, систем воздействия и идентификации поверхности, конструкции космического аппарата обеспечивают свободный или минимально ограниченный разлет продуктов абляции.
Примечание: далее под малоразмерным понимается объект объемом меньше объема космического аппарата, среднеразмерным - от 1 до 10 объектов космического аппарата, крупноразмерным - свыше 10 объемов космического аппарата.
Перечень фигур
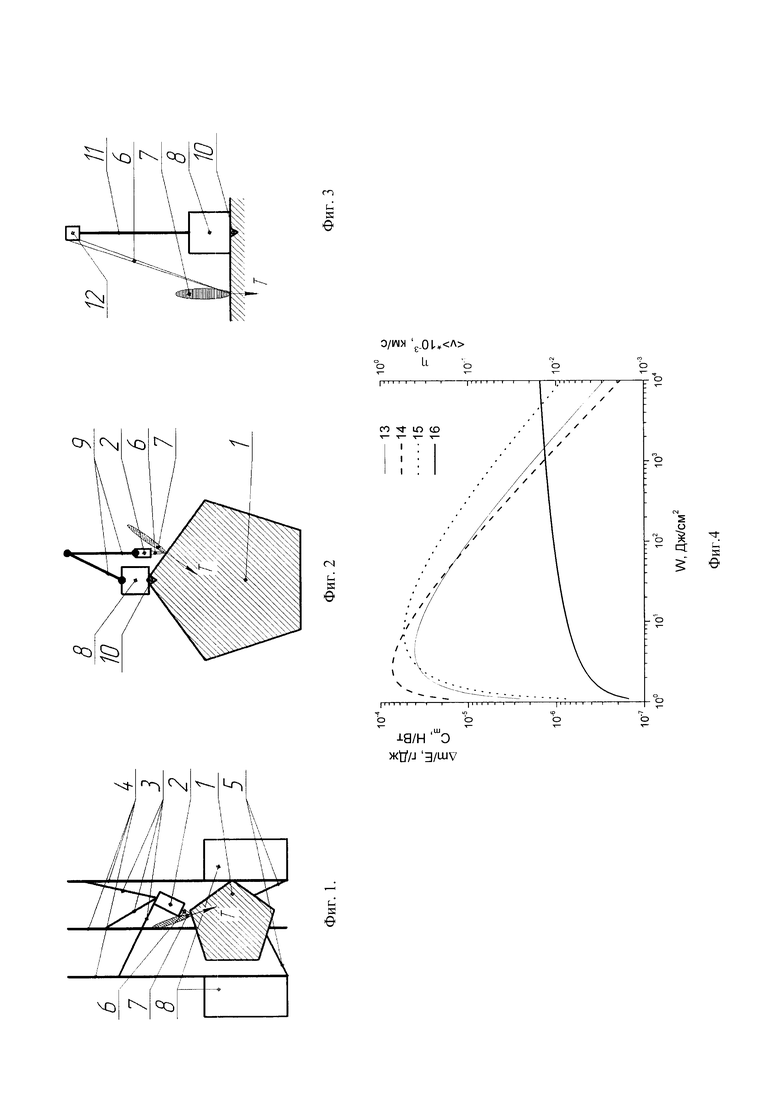
На фиг. 1 представлен вариант схемы прикрепления объекта к малоразмерному объекту космического мусора с использованием дельта-механизма для сканирования поверхности.
На фиг. 2 представлен вариант схемы прикрепления объекта к среднеразмерному объекту космического мусора с использованием манипулятора-руки для сканирования поверхности.
На фиг. 3 представлен вариант схемы прикрепления объекта к крупноразмерному объекту космического мусора с использованием гальвопривода для сканирования поверхности.
На фиг. 4 - графики моделирования зависимостей удельного механического импульса отдачи Cm (13), удельного массового расхода Δm/Е (14), эффективности преобразования энергии η (15) и среднемассовой скорости <v> (16) от плотности энергии лазерного излучения W для металла с порогом абляции Wa=1 Дж/см2.
Осуществление изобретения
Космический аппарат с устройством, обеспечивающим сканирование поверхности произвольной формы лазерным лучом (например, на основе манипулятора-руки, дельта-робота по патенту США US 4976582 (МПК B25J 11/00; B25J 17/00; B25J 17/02; B25J 9/06; B25J 9/10; (IPC1-7): B25J 9/12, Опубликован 1990-12-11) или гальвопривода), жестко закрепляется на поверхности объекта космического мусора любым способом (например, примагничивается, прихватывается стропами по патентной заявке США US 2015053823 (МПК B64G 1/22; B64G 1/40; B64G 1/44; B64G 1/64, Опубликована 2015-02-26) или охватывается лапами по патенту США US 6655637 (МПК B64G 1/00; B64G 1/10; B64G 1/24; B64G 1/64; (IPC1-7): В64С 1/62, Опубликован 2003-12-02) или вбуривается винтовыми элементами или гарпунами по патенту РФ RU 2510359 (МПК B64G 1/10, B64G 1/14, Опубликовано: 27.03.2014 Бюл. №9)).
С использованием системы сканирования производят картирование доступной поверхности объекта космического мусора. В результате анализа полученной карты удаленно оператором или встроенными средствами создают программу сканирования поверхности для обеспечения максимального значения параметра проекции механического импульса на заданную ось. В соответствии с созданной программой производят сканирование поверхности силовым лазерным лучом. Параметры лазерного воздействия (энергию лазерных импульсов и размер пятна фокусировки) подбирают экспериментально, определяя порог плазмообразования для данного вещества (примерно соответствует оптимальной величине цены тяги), или с использованием данных системы ориентации и стабилизации космического аппарата, или выбирают из предустановок, исходя из химического состава вещества космического мусора, определяемого, например, по данным атомно-эмиссионной спектроскопии абляционного факела.
На фигурах обозначены: 1 - объект космического мусора, 2 - исполнительный орган (включает источник силового лазерного излучения с системой фокусировки излучения, систему распознавания поверхности), 3 - тяги дельта-механизма, 4 - направляющие дельта-механизма, 5 - органы удержания космического мусора, 6 - сфокусированное лазерное излучение, 7 - абляционный факел, 8 - служебные модули космического аппарата, 9 - тяги манипулятора-руки, 10 - анкер, 11 - основание гальвопривода (возможно, телескопическое, с интергрированной системой фокусировки силового и зондирующего лазерного излучения), 12 - гальвопривод, Т - направление силы тяги (локальная нормаль к облучаемой поверхности).
Значительная часть объектов космического мусора состоит из металлов. Для воздействия на металлы целесообразно использовать наносекундные импульсы лазерного излучения, т.к. при этом достигаются достаточно высокие значения энергии импульсов и сравнительно небольшие потери на рассеяние энергии вследствие теплопроводности. Энергии лазерных импульсов, достижимые в компактных твердотельных лазерах с диодной накачкой, лежат в диапазоне от 1 до 100 мДж (в дисковых и слэб-лазерах достигнуты энергии импульсов 100 Дж, но компактными такие системы признать уже нельзя). Характерный размер пятна фокусировки с учетом точности позиционирования фокальной плоскости и исходя из опыта применения технологических лазеров следует принимать от 30 до 100 мкм.
Таким образом, на мишени может быть достигнута плотность энергии излучения от 10 до 10000 Дж/см2. Эти значения превышают пороги наносекундной лазерной абляции и плазмообразования даже тугоплавких металлов (до 4 Дж/см2). Характерный удельный массовый расход наносекундной лазерной абляции для металлов в вакууме составляет примерно 3*10-5 г/Дж, или в рассматриваемом случае от 3*10-8 до 3*10-6 г/имп., что при частоте следования в 1 кГц дает такие же числовые значения в кг/с. Таким образом, для абляции 1 кг вещества понадобится от 4 дней до 1 года работы.
В указанном диапазоне плотностей энергии удельный механический импульс отдачи (величина, обратная цене тяги) для металлов составляет примерно 3*10-5 Н/Вт. Таким образом, средняя тяга будет составлять от 3*10-5 до 3*10-3 Н, а механический импульс, сообщаемый при абляции 1 кг вещества составит примерно 103 Н*с, что соответствует удельному импульсу примерно 100 с. При оптимизации параметров воздействия на металлы показана возможность достижения удельного импульса более 1000 с, что означает меньший удельный массовый расход, но и меньшую тягу. С одной стороны, при воздействии на космический мусор нет жесткой необходимости экономить массу бросового рабочего вещества (РВ). С другой - целесообразно максимально эффективно использовать сканируемую поверхность, чтобы минимизировать число переприсоединений системы для доступа к новым запасам рабочего вещества и уменьшить ее габариты. Для представленного режима воздействия энергетическая эффективность лазерной генерации тяги составляет всего 1,5%, что явно соответствует оценке снизу, т.к. достигнутые значения этого параметра при наносекундном воздействии на массивные металлы в вакууме на порядок-полтора выше. Общие же зависимости тягово-энергетических параметров таковы, что только удельный импульс непрерывно растет с увеличением плотности энергии излучения, стремясь к некоторой асимптоте; зависимость удельного импульса имеет оптимум при плотности энергии примерно 4,5 от пороговой для абляции и для большинства металлов составляет примерно 2-3 Дж/см2 в наносекундном диапазоне; для энергетической эффективности этот оптимум составляет примерно 7,5 (или 3,5-5 Дж/см2).
Из Фиг. 4 по графикам видно, что при достигнутом уровне средней мощности наносекундных слэб-лазеров с диодной накачкой в 1 кВт в режиме максимальной эффективности можно развить тягу примерно 20 мН при удельном импульсе примерно 1000 с. Также видно, что при выборе режима воздействия целесообразно превышать порога лазерной абляции примерно в 10 раз, когда максимальная энергетическая эффективность сочетается с близкой к оптимальной ценой тяги и высоким удельным импульсом. Изменение скорости Δv, достаточное для сталкивания объектов космического мусора с низких околоземных орбит, измеряется несколькими десятками - первыми сотнями м/с. Исходя из принципов реактивного движения, массы удаленного вещества и объекта космического мусора будут соотноситься так же, как требуемое приращение скорости и среднемассовая скорость абляционного потока (произведение удельного импульса на ускорение свободного падения). Таким образом, при Δv ~ 100 м/с и удельном импульсе ~1000 с потребуется удалить лишь примерно 1% массы объекта космического мусора с присоединенным к нему КА. При доле конструкции в сухой массе КА около 20% орбитальные маневры становятся вполне реалистичными без разрушения КА (следует иметь в виду, что сплошное сканирование может привести к нежелательному отделению мелких фрагментов). Если рассматривать использование массы космического мусора для дальнейших полетов, например, к Луне, согласно формуле Циолковского, конечная масса должна составлять около 1/55 от начальной. Для метеороидов, состоящих преимущественно из железа, такое соотношение принципиально может быть достигнуто.
Для оптимизации режима лазерного воздействия на конкретный объект (за счет изменения размера пятна фокусировки) понадобится обратная связь от систем ориентации и навигации КА. Из-за небольших энергий импульсов, достижимых в одном лазерном излучателе, потребуется использование нескольких излучателей для воздействия на одну и ту же или различные области сканируемой поверхности. Для надежности всей системы понадобится также дублирование привода исполнительного устройства.
Традиционная для лазерных технологических установок и 3D-принтеров схема с ортогональными направляющими имеет сравнительно низкую надежность и скорость сканирования (до 0,1 м/с). Манипуляторы типа «рука», широко используемые в технологии лазерной сварки (скорость при обработке до 0,25 м/с, при перемещениях - обычно примерно 1 м/с, но есть образцы и до 10 м/с), дороги и сложны (вопрос надежности), однако, они хорошо обеспечивают требования по скорости и размеру области сканирования, имеется опыт эксплуатации подобных роботов на внешней поверхности МКС. На взгляд авторов наиболее перспективными системами с точки зрения надежности и производительности являются основанные на зеркалах с гальвоприводом и дельта-механизме.
Пример реализации.
Основой космического аппарата является дельта-механизм (фиг. 1) с линейными направляющими. В случае если объект космического мусора обладает размерами, достаточными для размещения его в объеме, ограниченном этими направляющими, он может быть зафиксирован, например, по принципу струбцины. На исполнительном органе дельта-механизма закреплены источник силового лазерного излучения и система фокусировки излучения, система распознавания поверхности, например, контактная и оптическая. При этом области распознавания поверхности и фокусировки силового лазерного излучения совпадают. Производят картирование доступной поверхности. Создают рабочую программу ее сканирования силовым лазерным лучом, исходя из полетного задания космического аппарата и заданных параметров оптимизации (например, максимально энергетической эффективности). Воздействие лазерным излучением осуществляют в течение времени, определяемого заданного изменением состояния поверхности или до сообщения определенного реактивного импульса потоком испаряемого вещества, перемещение области воздействия на соседнюю или в заданную области поверхности объекта.
Изобретение относится к области управления положением объектов в космическом пространстве. Способ перемещения объектов космического мусора с постепенным использованием его вещества в качестве рабочего тела реактивного движителя космическим аппаратом (КА), оснащенным лазерной двигательной установкой и устройством, обеспечивающим сканирование поверхности произвольной формы. КА жестко закрепляется на поверхности объекта космического мусора. С использованием системы сканирования производят картирование доступной поверхности объекта космического мусора. В результате анализа полученной карты создают рабочую программу сканирования поверхности для обеспечения максимального значения проекции на заданную ось механического импульса, возникающего при лазерном воздействии на поверхность объекта космического мусора. В соответствии с созданной программой производят воздействие на поверхность силовым лазерным лучом для перемещения с постепенным уничтожением вещества объектов космического мусора. Техническим результатом изобретения является обеспечение переработки космического мусора путем использования его вещества в качестве рабочего тела лазерной двигательной установки. 4 ил.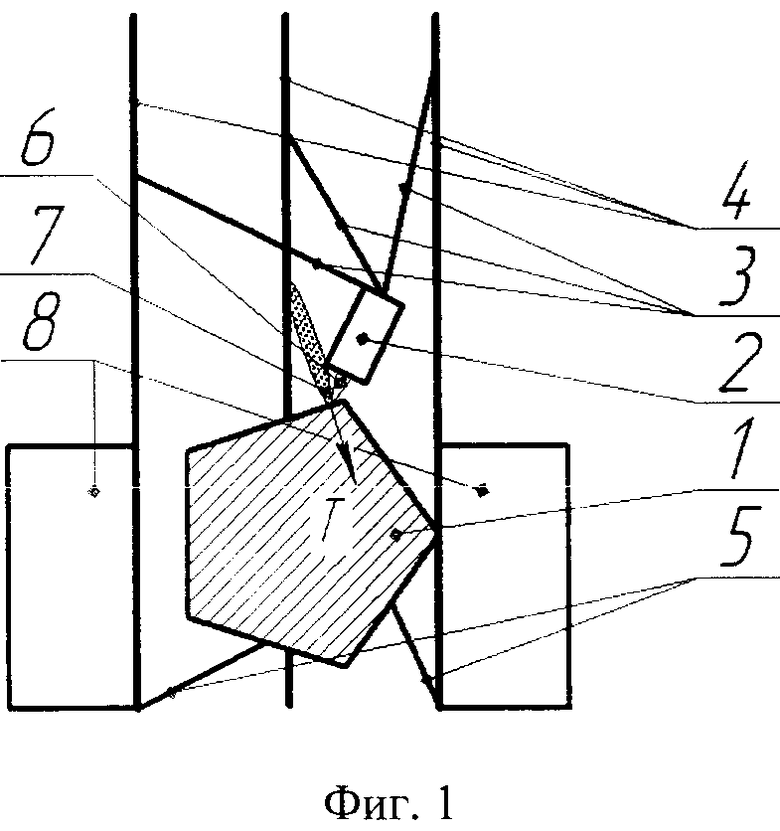
Способ перемещения объектов космического мусора с постепенным использованием его вещества в качестве рабочего тела реактивного движителя космическим аппаратом, оснащенным лазерной двигательной установкой и устройством, обеспечивающим сканирование поверхности произвольной формы; при этом космический аппарат жестко закрепляется на поверхности объекта космического мусора, далее с использованием системы сканирования производят картирование доступной поверхности объекта космического мусора, в результате анализа полученной карты создают рабочую программу сканирования поверхности для обеспечения максимального значения проекции на заданную ось механического импульса, возникающего при лазерном воздействии на поверхность объекта космического мусора, и в соответствии с созданной рабочей программой производят воздействие на поверхность силовым лазерным лучом для перемещения с постепенным уничтожением вещества объектов космического мусора; при этом параметры лазерного воздействия, а именно энергию лазерных импульсов и размер пятна фокусировки лазерного луча - выбирают, исходя из химического состава вещества космического мусора.

