Изобретение относится к накопителям на оптических дисках с регулируемой скоростью вращения, используемым в вычислительных машинах, в частности, к снижению энергопотребления многоскоростных дисководов с постоянной линейной скоростью.
Уровень техники
Известно, что снижение энергопотребления вычислительных машин и их периферийных устройств способствует экономии электроэнергии. Также известно, что снижение энергопотребления компонентов и периферийных устройств вычислительных машин позволяет уменьшить размер источника питания, необходимого для данной функции. Источник питания меньшего размера облегчает использование портативных вычислительных машин, например, компьютеров блокнотного типа. Поэтому желательно уменьшить мощность, потребляемую периферийными устройствами вычислительной машины, чтобы обеспечить экономию энергии и сделать их более удобными.
Известен способ, при котором напряжение, подводимое к двигателю перемещения головки компьютерного диска, уменьшают, если в дисковод не загружен носитель записи. Такое устройство описано в патенте США 4783706 на имя Shoji et al. (Шойи и др.). Однако, если в дисководе находится носитель записи, этот способ не может обеспечить экономию энергии.
Известен также способ прекращения вращения носителя записи, если дисковод бездействовал в течение некоторого установленного интервала времени. Это обеспечивает экономию энергии, так как при этом диск находится в режиме холостого хода. Такой способ описан в патенте США 5197055 на имя Hartung et al. (Хартунг и др.). Однако, при этом имеет место значительная задержка при запуске вращения диска до достижения рабочей скорости.
В патенте США 4987502 на имя Freese (Фризи) предложено использовать произвольный выбор последовательных дорожек диска, чтобы распределить износ, вызванный контактом с головкой. В этой системе считают периоды холостого хода, чтобы определить, когда перемещать головку. После того, как достигнуто некоторое установленное максимальное число периодов холостого хода, система с помощью контроллера останавливает вращение диска. Остановка вращения диска влияет на энергопотребление также, как способ прекращения вращения, описанный в упомянутом выше патенте '055. При использовании способа по патенту '502 также имеет место существенная задержка в достижении рабочей скорости после остановки.
Аналогичные способы и устройства смещения головки с целью уменьшения износа описаны в патентах 5050015 на имя Hock et al. (Хок и др.) и 5117315 на имя Nagasaki et al. (Нагасаки и др.). В патенте '015 описано перемещение головки на дорожку ожидания или область за пределами полезной области магнитных дорожек. Положение дорожки и время ожидания зависят от того, какие дорожки считываются наиболее часто, поскольку патент '015 решает задачу уменьшения износа. Для достижения смещения останавливается и запускается управляющая схема. К сожалению, остановка и запуск электронной схемы управления увеличивают энергопотребление. В патенте '315 предложено смещать головку, когда процессор обнаруживает наличие или отсутствие вращения диска. Данная система предназначена для уменьшения износа за счет незначительного смещения головки на две-три дорожки и поднятия головки при запуске диска. Энергия сберегается благодаря уменьшению эффекта тяги головки, неизбежно контактирующей с диском при его запуске, однако, эти способ и устройство не подходят для обеспечения энергосбережения, когда диск уже находится в движении.
В патенте США 4658308 на имя Sander (Сандер) предложены способ и устройство для перемещения головки в безопасное исходное положение под управлением микропроцессора, если определено, что подачу питания к вращающемуся диску следует прервать. При этом, вероятно, достигается незначительная экономия энергии благодаря уменьшению неизбежных эффектов тяги, которые бы имели место, если бы головка взаимодействовала с вращением диска. Однако, эти способ и устройство неэффективны для уменьшения энергопотребления, когда диск вращается в полезном рабочем режиме.
В источнике информации "Patent Abstracts of Japan", том 15 N 220 (P-1211) от 05.06.1991, описан способ снижения энергопотребления установленного в вычислительной машине дисковода магнитных дисков. Согласно этому способу определяется наличие доступов к диску в течение некоторого установленного времени. Если доступов не было, магнитную головку перемещают на наружную дорожку магнитного диска и, используя дополнительную схему регулировки скорости, уменьшают скорость вращения диска до минимального необходимого числа оборотов, чтобы обеспечить плавающее движение магнитной головки.
В европейской заявке на патент N 0364222 описан способ, согласно которому отключают питание жесткого диска по истечении некоторого установленного времени отсутствия доступа к нему, в результате чего диск прекращает вращение.
Сущность изобретения
Целью данного изобретения является снижение энергопотребления дисковода оптических дисков, не оказывающее существенного влияния на время реагирования на команду поиска данных.
Изобретение решает задачу создания устройства и способа для снижения энергопотребления, которые не требуют удаления диска из дисковода оптических дисков.
Предложен способ снижения энергопотребления дисковода оптических дисков для вычислительных машин, содержащего головку, предназначенную для считывания данных, привод головки, дисковый носитель, имеющий наружную периферию и устанавливаемый в процессе использования в дисковод, реле времени, управляющий процессор, взаимодействующий с реле времени, двигатель шпинделя для вращения дискового носителя с измеримой угловой скоростью и модуль управления двигателем шпинделя для поддержания в основном постоянной линейной скорости дискового носителя относительно головки, при котором согласно изобретению (a) определяют, бездействует ли дисковод; и (b) выдают сигнал поиска приводу головки для смещения головки на дорожку дискового носителя, ближайшую к его наружной периферии, если дисковод бездействует, снижая тем самым угловую скорость диска для поддержания линейной скорости дискового носителя относительно головки на минимальном уровне, при котором головка все еще может считывать или записывать данные на дисковый носитель, что обеспечивает снижение энергопотребления двигателя шпинделя.
Предложено устройство для снижения энергопотребления дисковода оптических дисков для вычислительной машины, содержащего головку, предназначенную для считывания данных, привод головки, дисковый носитель, имеющий наружную периферию и устанавливаемый в процессе использования в дисковод, реле времени, управляющий процессор, взаимодействующий с реле времени, двигатель шпинделя для вращения дискового носителя с измеримой угловой скоростью и модуль управления двигателем шпинделя для поддержания в основном постоянной линейной скорости дискового носителя относительно головки, которое согласно изобретению содержит средство для определения, бездействует ли дисковод, и средство для выдачи сигнала, предназначенное для выдачи сигнала поиска приводу головки для смещения головки на дорожку дискового носителя, ближайшую к его наружной периферии, если дисковод бездействует, и снижения тем самым угловой скорости диска для поддержания линейной скорости дискового носителя относительно головки на минимальном уровне, при котором головка все еще может считывать или записывать данные на дисковый носитель, что обеспечивает снижение энергопотребления двигателя шпинделя.
Изобретение основано на аналитических рассуждениях авторов, что энергопотребление дисковода оптических дисков можно снизить, определив, когда имеет место период бездействия, и выдав команду, уменьшить скорость двигателя шпинделя, вращающего дисковый носитель, до минимального "рабочего уровня" без полной остановки или прекращения вращения диска на время периода бездействия. Понятие "рабочий уровень" относится к такой угловой скорости, при которой головка все еще может считывать или записывать данные.
В дисководе с постоянной линейной скоростью (ПЛС) от микропроцессора на привод поступает сигнал вынудить головку, выполненную с возможностью считывания, перейти на наружную дорожку, если имел место некоторый установленный период бездействия. Данная операция обоснована тем, что угловая скорость дискового носителя при определенной постоянной линейной скорости (скорости, измеренной под головкой) меньше на наружной периферии, и поэтому энергопотребление двигателя шпинделя, вращающего диск, будет меньше.
Целесообразно держать диск в рабочем режиме, то есть никогда не останавливать его вращение полностью, за исключением тех случаев, когда диски остаются в бездействии в течение продолжительных интервалов времени. При этом не происходит существенная задержка на запуск вращения диска после приема команды ввода/вывода данных. Следовательно, изобретение можно использовать для снижения энергопотребления двигателя шпинделя диска, удерживая диск в рабочем режиме. Что касается упомянутого выше исключения, когда диск остается в бездействии в течение некоторого установленного интервала времени, достаточно продолжительного, чтобы можно было остановить вращение диска. Остановка диска согласно изобретению последует только либо после перемещения головки на наружную дорожку в дисководах ПЛС, либо после снижения угловой скорости до минимальной возможной скорости в многоскоростных дисководах ПЛС.
В дальнейшем изобретение поясняется описанием конкретных вариантов его выполнения со ссылкой на прилагаемые чертежи.
Краткое описание чертежей
на фиг. 1 изображена структурная электрическая схема, согласно изобретению;
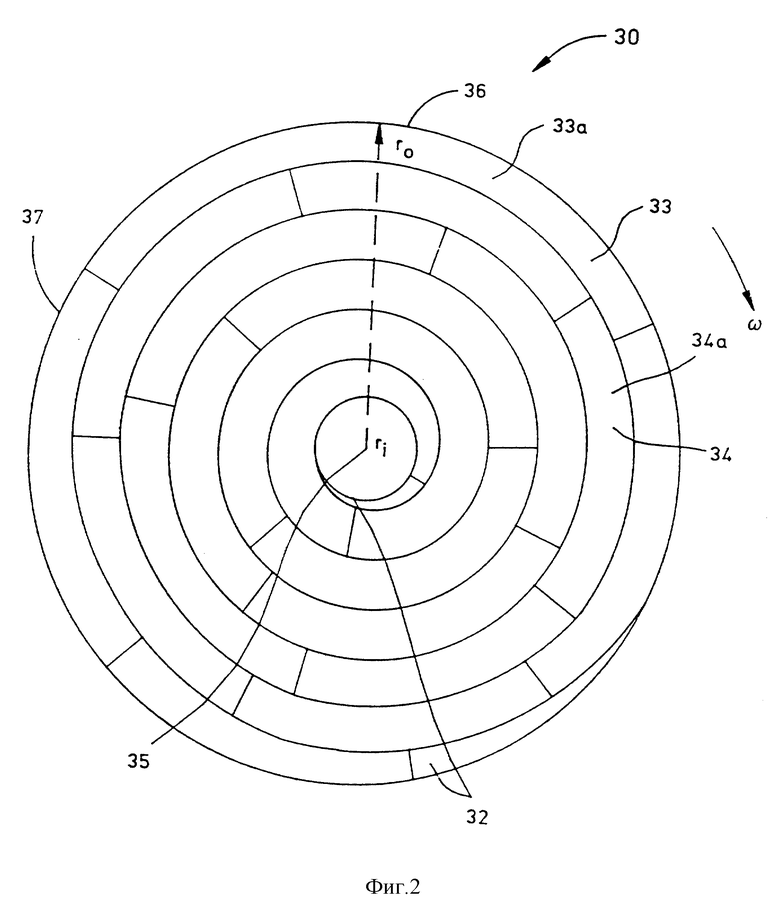
фиг. 2 - дисковый носитель, пригодный для применения в дисководах с постоянной линейной скоростью;
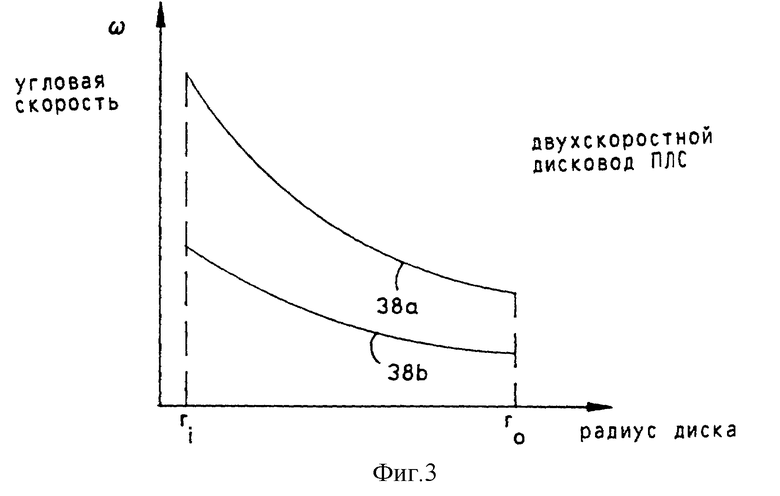
фиг. 3 - график, иллюстрирующий взаимосвязь, представляющую существенное значение для изобретения;
фиг. 4 - алгоритм одного варианта осуществления изобретения; и
фиг. 5 - схематическое изображение временной последовательности операций, необходимое для понимания изобретения.
Для облегчения понимания изобретения ниже приводятся некоторые законы электротехники, касающиеся дисководов, в частности, двигателей постоянного тока, пригодных для вращения дисковых носителей информации.
Общеизвестно, что согласно закону Ома напряжение (V) равно току (I), умноженному на сопротивление (R) двигателя, т.е. V = I • R. Известно также, что мощность (P) двигателя определяется следующей зависимостью P = V • I = V2/R. И известно, что падение напряжения для определенного двигателя соотносится с его угловой скоростью в соответствии со следующим уравнением:
V = Ke•ω
где Ke - постоянная двигателя по напряжению, зависящая от характеристик определенного типа двигателя, а ω - угловая скорость этого двигателя, из чего можно получить следующую полезную зависимость:
P = (Ke2•ω2/R)
Исходя из этого, авторы изобретения решили, что, поскольку мощность, расходуемая двигателем, уменьшается при снижении угловой скорости двигателя, было бы целесообразно разработать способ и устройство, в которых бы автоматически использовалось преимущество, обеспечиваемое данным соотношением.
Варианты воплощения изобретения
На фиг. 1 представлена общая структурная электрическая схема устройства, обеспечивающего снижение мощности, потребляемой дисководом 10. Предпочтительным вариантом является дисковод оптических дисков, однако, изобретательский замысел данного изобретения применим также и для устройств для работы с неоптическими дисками, например, запоминающих устройств с прямым доступом. Изобретение предназначено для использования в дисководах, работающих на схемах управления с постоянной линейной скоростью (ПЛС). Микропроцессор 12 имеет собственную память, такую как запоминающее устройство с произвольной выборкой 13 и постоянное запоминающее устройство 15, используемое для хранения команд и выполнения таких задач, как проверки "включения питания". Это ЗУ используется для хранения набора микрокоманд 14, представляющего собой набор предварительно запрограммированных команд для выполнения функций микропроцессора. Предпочтительно использовать набор микрокоманд в микропроцессоре, составляющем часть дисковода, например, как показанный на чертеже набор микрокоманд 14, составляющий часть микропроцессора 12, предназначенного для дисковода 10. Однако, подразумевается, что можно применять подходящие команды и другими способами, например, использовать прикладную программу, написанную на языке "C" и выполняемую блоком управления 26, сопряженным с дисководом 10 через интерфейсные схемы 27. Но гораздо эффективнее выполнять команды непосредственно в микропроцессоре, так как при этом сведена к минимуму длина маршрута передачи данных. Набор команд зависит от конкретного микропроцессора. Некоторые распространенные микропроцессоры, используемые в вычислительных машинах и периферийных устройствах, выпускает компания Intel Corporation, хотя для выполнения аналогичных задач подходят также микропроцессоры других производителей, например, компании Motorola. В частности, для более полного представления о программировании микропроцессора модели Intel можно сослаться на следующие публикации: Intel, Microprocessor Peripheral Book, Vol. 1, а также Crawford and P.Gelsinger, Programmind the 80386.
Изображенный на фиг. 1 и 2 микропроцессор 12 осуществляет связь с блоком управления 26, которым может быть микропроцессор персональной вычислительной машины, через интерфейсные схемы 27, в качестве которых можно использовать, например, SCSI-плату (интерфейс малых вычислительных систем). Микропроцессор 12 управляет модулем управления шпинделем 16, который в свою очередь управляет двигателем 18 шпинделя, питающимся от источника питания 19. Двигатель шпинделя содержит вращающий элемент 24 и дисковую платформу 22, предназначенную для размещения и вращения дискового носителя, такого как диск 30 (фиг. 2). Микропроцессор также управляет приводом 17, который посредством известного механизма управляет движением головки считывания данных 23. Данные, считанные с головки, поступают через буфер 28 и схемы передачи данных 25 на блок управления 26. Модуль управления шпинделем 16 и привод 17 управляются набором микрокоманд 14 в микропроцессоре 15 в зависимости от того, запрограммировано устройство на работу по схеме с постоянной линейной скоростью или постоянной угловой скоростью. Микропроцессор 12, содержащий набор микрокоманд 14 и включающий встроенные ЗУПВ 13 и ПЗУ 15 и реле времени 11, образует модуль энергосбережения 21 для дисковода 10.
Постоянная линейная скорость
Один возможный вариант выполнения изобретения можно использовать с известными дисководами с постоянной линейной скоростью. В дисководе оптических дисков с постоянной линейной скоростью, например, дисководе CD-ROM, лазерная головка служит преобразователем скорости. На изображенном на фиг. 2 диске CD-ROM 30 используется один путь 32, образующий приблизительно концентрические окружности, такие как окружности 33 и 34. Этот единственный путь образует спираль от центра 35 диска 30 к его внешней периферии 36. Сектор 37, содержащий данные, имеет логический и физический размер, равный всем другим секторам диска. Хотя реально имеется только один путь, каждая приблизительно концентрическая окружность называется дорожкой. На чертеже изображена штриховая линия "r", проходящая от центра 35 к наружной периферии 36. Точки r1 и r2 на радиальной линии r соответствуют внутреннему радиусу, начинающемуся вблизи центра диска, и наружному радиусу, измеряемому вблизи наружной периферии или непосредственно на ней. Угловая скорость диска ω равна угловой скорости двигателя шпинделя, который его вращает. Дорожки 33a и 34a соответствуют окружностям 33 и 34. Следовательно, дорожка 33a является дорожкой ближайшей к наружной периферии диска 30.
На фиг. 2 и 3 представлена критическая зависимость между радиусом диска и мощностью, потребляемой двигателем дисковода ПЛС. При работе по схеме с постоянной линейной скоростью дисковод (например, дисковод 10) постоянно изменяет скорость, с которой вращается диск (например, диск 30), по мере того, как головка считывания данных (например, головка 23) движется по части диска, при этом скорость, измеренная на головке, сохраняется постоянной. Эта скорость Vdata по существу является скоростью носителя данных, считываемого головкой. В многоскоростных устройствах Vdata можно также изменять, однако, после того, как скорость была выбрана, Vdata поддерживается постоянной по мере изменения угловой скорости. Кинематическая или вращательная динамическая зависимость известна из следующего уравнения:
Vdata = r•ω
где r - радиус диска, Vdata тангенциальная (т.е. направленная перпендикулярно как к нормальной оси вращения, так и к радиусу) скорость данных, измеренная на головке, и ω - угловая скорость, типично измеряемая в оборотах в минуту (об/мин). Для выполнения приведенной зависимости, при определенной постоянной линейной скорости Vdata соответствующая угловая скорость должна уменьшаться по мере того, как радиус увеличивается от центра диска к его наружной периферии. Для иллюстрации, на фиг. 3 представлен график зависимости угловых скоростей от радиуса в многоскоростном дисководе, работающем по схеме с постоянной линейной скоростью. Точки ri и r0 соответствуют радиальной линии "r" на фиг. 2. Верхняя кривая 38a на фиг. 3 показывает обратную зависимость угловой скорости ω от увеличения радиуса при установке многоскоростного дисковода ПЛС на более высокую скорость. Нижняя кривая 38b показывает идентичную зависимость, но при меньших величинах, для установки многоскоростного дисковода ПЛС на более низкую скорость. Эта зависимость может быть взаимосвязана с расходом мощности, так как известно, что
P = (Ke2•ω2)/R,
при этом 
Придя к выводу, что данную закономерность можно использовать для снижения энергопотребления дисковода, авторы разработали автоматические способ и устройство для использования того факта, что увеличение радиуса r до его максимального значения снижает угловую скорость, а значит и энергопотребление двигателя шпинделя в дисководе с постоянной линейной скоростью, оставляя при этом дисковод в "рабочем" состоянии. Рабочей скоростью или уровнем считается такая скорость диска, при которой головка может считывать или записывать данные на диск.
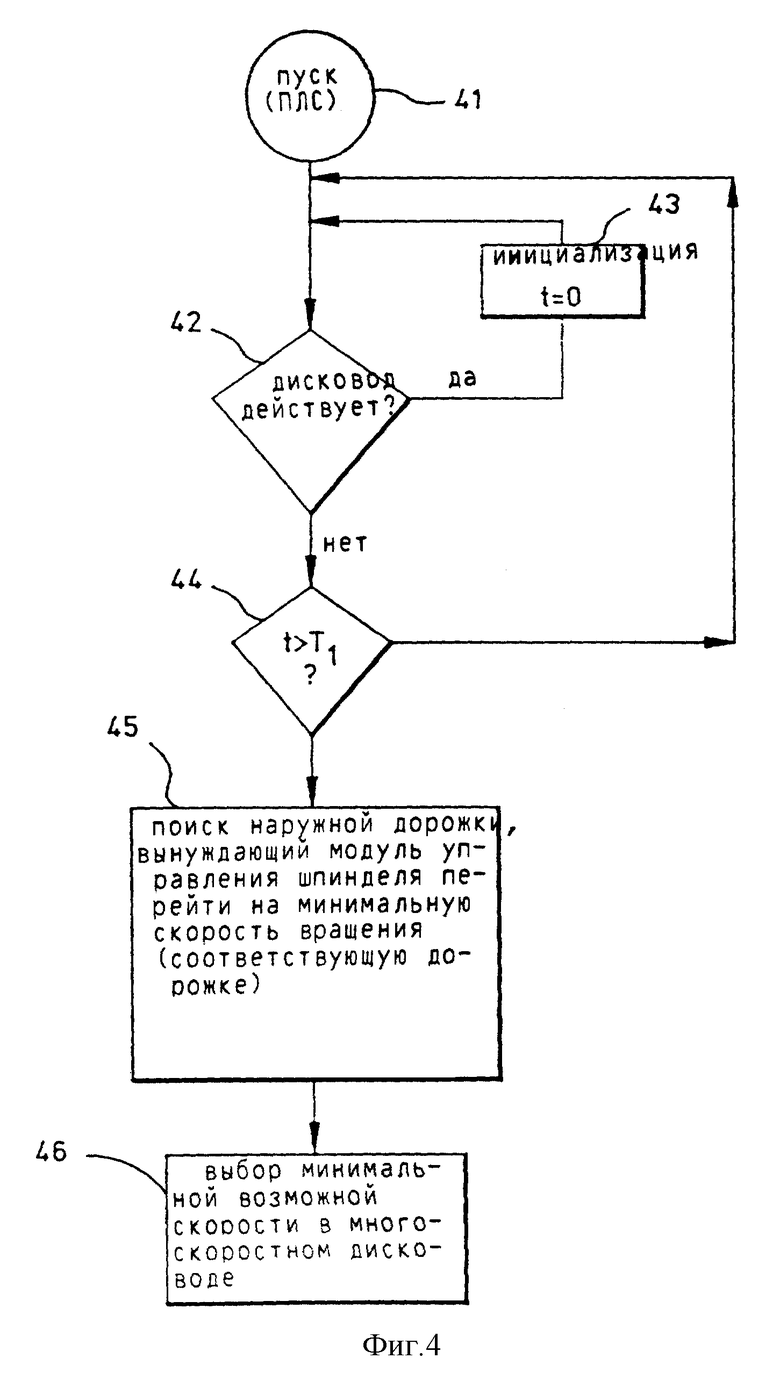
Обратившись к фиг. 1 и 4, можно лучше понять предпочтительный вариант осуществления изобретения. На фиг. 4 представлены команды, входящие в блок-схему программы. На каждом этапе микропроцессор 12 выполняет команды из набора микрокоманд для осуществления процесса, однако, с целью упрощения ссылка делается только на микропроцессор, поскольку он является главным исполнителем. Этап 41 "start" (пуск) микропроцессора соответствует включению питания дисковода. Этап проверки "drive active" (дисковод действует?) 42 выполняется микропроцессором, определяющим, передаются ли какие-либо данные между головкой 23 и диском или между буфером 28 и схемами передачи данных 25. Альтернативно, этап 42 выполняется блоком управления 26, определяющим, есть ли в данный момент открытые файлы (т.е. файлы, в которых производится считывание или запись данных). Если это имеет место, дисковод признается "действующим" и реле времени 11, используемое для измерения периодов "бездействия", устанавливается на нуль на этапе 43. Этап 42 выполняется постоянно до тех пор, пока не прекратится всякая деятельность, и когда это условие выполняется, дисковод признается "бездействующим". Затем процессор проверяет реле времени 11, чтобы определить, прошло ли установленное время T1 с тех пор, когда дисковод стал бездействующим (этап 44). В течение этого времени "бездействия" дисковод все еще проверяется на наличие деятельности. По истечении установленного времени, если дисковод все еще бездействует, можно установить, что "уровень действия" дисковода находится ниже некоторого установленного эталонного уровня действия. Поэтому, когда время t, измеренное реле времени 11, превышает некоторое установленное время T1, а дисковод все еще находится в бездействующем состоянии, микропроцессор 12 переводит дисковод 10 в режим энергосбережения (этап 45). Авторы полагают, что можно также переходить на режим энергосбережения, если измеренное время t меньше некоторого установленного времени T1.
Как показано на фиг. 1, 2, 3 и 4, в дисководе с постоянной линейной скоростью от микропроцессора 12 на привод 17 передается сообщение, побуждающее головку 23 искать дорожку 33a, которая имеет максимальный радиус, измеренный от центра диска 35 (этап 45 на фиг. 4). Модуль управления шпинделем 16, автоматически конфигурируемый на поддержание постоянной линейной скорости (Vdata), компенсируется посредством уменьшения угловой скорости двигателя 18 шпинделя до минимального рабочего уровня, изображенного на фиг. 3 (где горизонтальной координатой является r0), как показано этапом 45. Таким образом, исходя из представленной выше зависимости, позволяющей уменьшить мощность при увеличении радиуса и уменьшении угловой скорости, экономия энергии будет существенной. Эта величина особенно ощутима, если учесть, что мощность обратно пропорциональна квадрату радиуса. Дополнительная экономия энергии обеспечивается микропроцессором 12, когда он дает команду модулю управления шпинделем 16 выбрать минимальную возможную скорость в многоскоростном дисководе (этап 46). В дисководе ПЛС при низкой скорости вращения, имеющей место, когда головка находится на наружной дорожке (например, дорожке 33a), одной команды поиска, выданной микропроцессором 12, достаточно для обеспечения доступа к данным, расположенным в любом месте диска. Хотя данный поиск в дисководе ПЛС вызывает изменение скорости, такое изменение возникает при любом применении поиска в таких устройствах. Следовательно, в режиме энергосбережения дисковод все же остается полностью в рабочем состоянии. Целесообразно, чтобы в состоянии бездействия диск вращался с уменьшенной скоростью, а не останавливался (т.е. не был в состоянии покоя), так как при полной остановке требуется значительное время на запуск вращения до рабочей скорости.
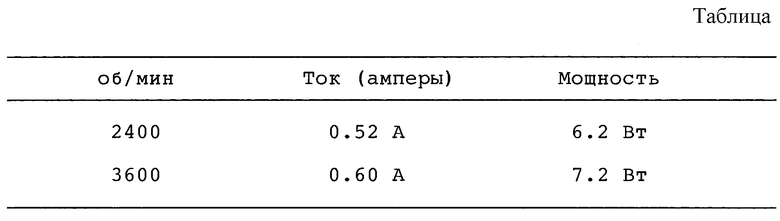
В приведенной ниже таблице представлен пример энергосбережения, измеренного авторами (угловая скорость определена в оборотах в минуту или об/мин) (см. таблицу):
В экспериментальной установке использовался дисковод оптических дисков модели Hewlett-Packard C1716T с постоянной угловой скоростью (ПУС) и токовый зонд модели Tektronix AM503 при указанных скоростях вращения. К двигателю подводили напряжение постоянного тока 12 В, а мощность вычисляли с помощью закона Ома. Из таблицы можно заметить, что снижение угловой скорости обеспечивает экономию около 16% энергии ((7.2-6.2)/6.2).
В этом случае, как видно из приведенной выше таблицы, экономия энергии в размере около 16% может быть достигнута за счет работы с более низкой скоростью. Конечно, при меньшей скорости вращения время доступа к данным будет ниже. Поэтому, применив ту же общую концепцию, что и приведенная выше для дисков с постоянной линейной скоростью, изобретатели признали, что контролирование уровня действия дисковода и сравнение его с критериями эталонного уровня действия позволяет автоматически снижать скорость, когда период бездействия превышает некоторое установленное время. Действующее состояние относительно состояния бездействия определяется наличием ввода/вывода данных, контролируемым микропроцессором 12, или фактом наличия открытых файлов, контролируемым блоком управления 26.
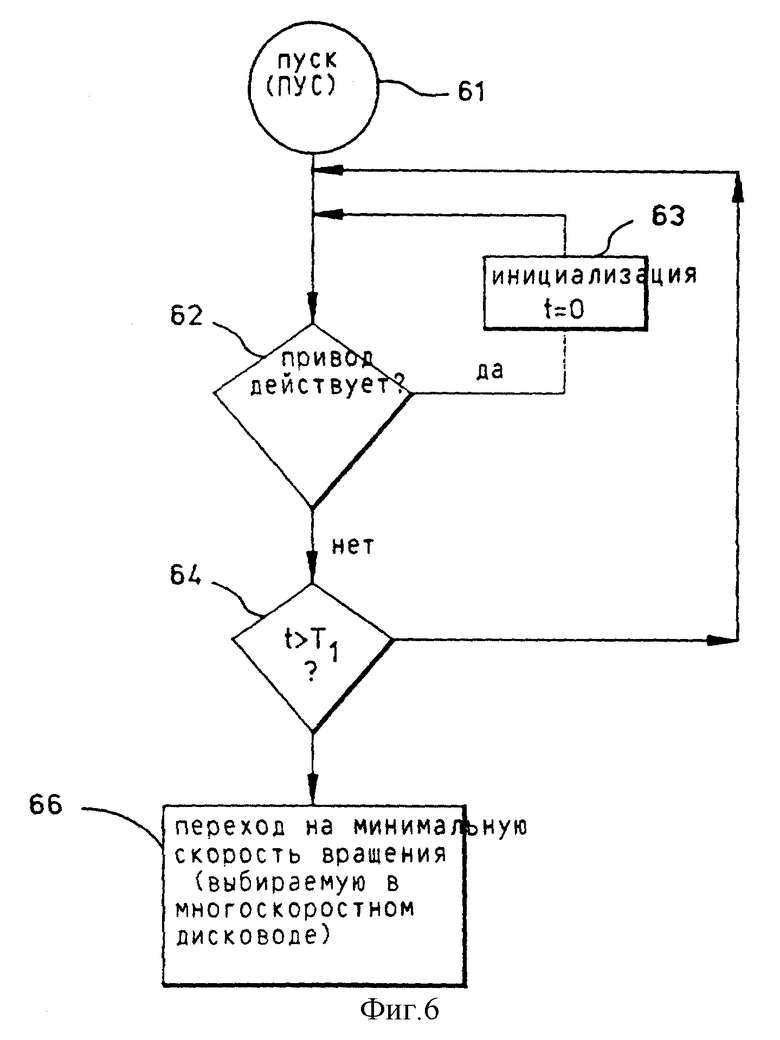
На фиг. 1 и 6 представлен вариант осуществления изобретения на дисководах ПУС. Как и в дисководах ПЛС, на каждом этапе микропроцессор 12 применяет набор микрокоманд 14 для выполнения процесса, однако для упрощения описания ссылка делается только на действия микропроцессора, выполняющего микрокоманды. Этап "start" (пуск) 61 микропроцессора 12 совпадает с включением питания дисковода. Как и в дисководах ПЛС, этап проверки "drive active" (дисковод действует? ) 62 выполняется микропроцессором 12, чтобы определить происходит ли ввод/вывод данных или есть ли в данный момент открытые файлы (т.е. файлы, в которых производится считывание или запись данных). Если есть открытые файлы, дисковод признается "действующим" и время t, измеряемое реле времени 11, устанавливается на нуль на этапе 63. Этап 62 выполняется непрерывно до тех пор, пока не прекратится передача данных или не будут закрыты все файлы, и при выполнении этого условия дисковод признается "бездействующим". Затем процессор проверяет реле времени 11, чтобы определить, прошло ли установленное время с тех пор, когда дисковод стал бездействующим. Как и в устройствах ПЛС, после того, как истекло установленное время бездействия дисковода на этапе 64, определяется, что уровень действия дисковода находится ниже некоторого принятого эталонного уровня действия. Поэтому после того, как время t, измеренное реле времени 11, превысит установленное время T1, а дисковод все еще находится в состоянии бездействия, микропроцессор 12 перейдет в режим энергосбережения, снизив угловую скорость дисковода до минимальной рабочей скорости, как показано на этапе 66.
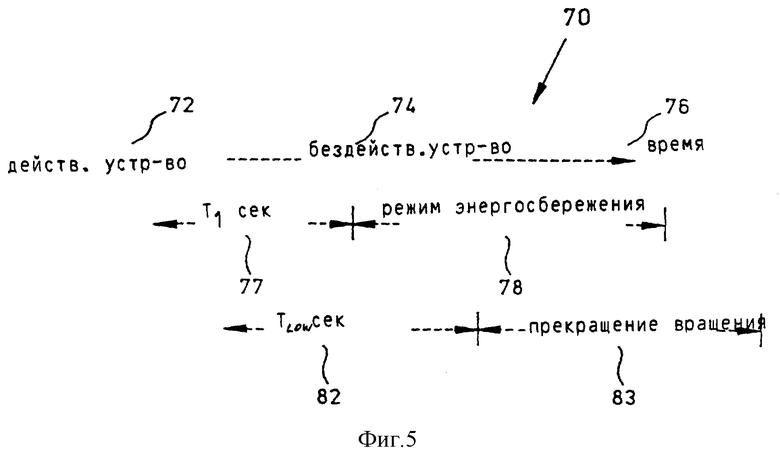
На фиг. 5 изображена линия времени 70, на которой время измеряется в направлении 76, показывающая, что к описанному выше общему способу энергосбережения можно добавить полное прекращение вращения устройства, если устройство находилось в режиме энергосбережения в течение некоторого установленного интервала времени. Это может быть реализовано, например, если вычислительная машина, в которой работает данный дисковод, включена, но не используется. Устройство признается действующим, как показывает сегмент 72 линии времени. Действие устройства определяется, как было описано выше на этапе 42 по фиг. 4. Устройство или дисковод, находящийся в состоянии бездействия (сегмент 74) в течение времени T1 (сегмент 77), переводится в режим энергосбережения (сегмент 78), в котором он остается в течение времени Tlow (сегмент 82), а затем скорость двигателя уменьшается до тех пор, пока двигатель не прекратит вращение (сегмент 83). Таким образом, можно объединить способ и устройство энергосбережения в нормальном рабочем режиме с дополнительными способами энергосбережения для дисководов, остающихся бездействующими в течение продолжительного интервала времени. В предпочтительном варианте предложенный способ выполняется микропроцессором, таким как микропроцессор 12, по командам набора микрокоманд, такого как набор микрокоманд 14. На выполнение данного способа можно также запрограммировать блок управления 26. При возникновении необходимости в устройстве оно может быть возвращено к вращению на нормальной рабочей скорости.
Изобретения предназначены для снижения энергопотребления дисководов оптических дисков для вычислительных машин в условиях сохранения их рабочего или близкого к рабочему режима. В способе определяют, бездействует ли дисковод в течение периода, превышающего некоторый установленный уровень действия. Угловую скорость вращения двигателя шпинделя дисковода снижают до минимального рабочего уровня или ниже, без остановки диска, перемещая головку на ближайшую к наружной периферии дорожку. Блок управления шпинделя уменьшает угловую скорость двигателя, поддерживая постоянную линейную скорость и снижая тем самым потребление энергии. Минимальный рабочий уровень относится к такой угловой скорости, при которой головка может записывать и считывать данные. Технический результат - снижение энергопотребления, не оказывающее существенного влияния на время реагирования на команду поиска данных, и отсутствие необходимости удаления диска из дисковода для снижения энергопотребления. 2 с. и 6 з.п.ф-лы, 6 ил., 1 табл.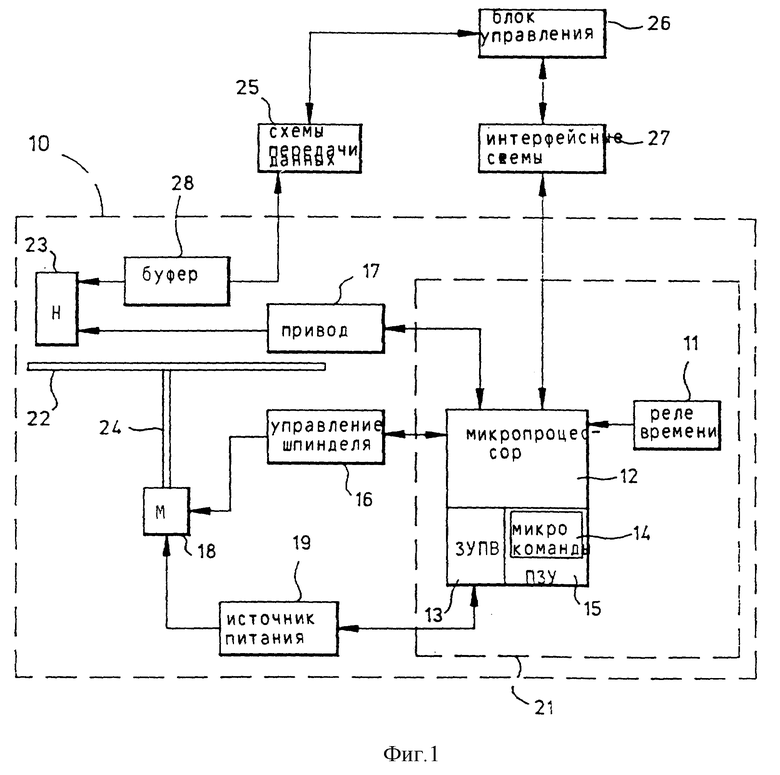
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Устройство привода и останова блока магнитных дисков | 1989 |
|
SU1679543A1 |
| Устройство для управления вращением дискового носителя записи | 1989 |
|
SU1679544A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
| ИМПУЛЬСНЫЙ МОДУЛЯТОР | 0 |
|
SU356763A1 |
| Установка для термического упрочнения стекла | 1974 |
|
SU521236A1 |
