Изобретение относится к области транспортного машиностроения, в частности, к тракторам сельскохозяйственного назначения со всеми ведущими колесами.
Известно транспортное средство (А. с. СССР 1341069, МПК B 60 K 17/10, 1987 г. ) содержащее двигатель с раздаточным редуктором, который соединен с регулируемыми насосами, снабженными механизмами регулирования для изменения рабочих объемов насосов, нерегулируемые гидромоторы, гидравлически связанные с насосами и приводящие движители, блок управления, соединенный с датчиками для контроля значений рабочих объемов.
Недостатком этого транспортного средства является ухудшение управляемости транспортного средства, так как она зависит от частоты вращения коленчатого вала двигателя. Кроме того? изменение режима работы двигателя увеличивает расход топлива.
Известна самоходная машина с гидрообъемной трансмиссией (А.с. СССР 518387, МПК 60 K 17/10 F 16 H 39/02, 1976), принятая за прототип. Она включает установленный на раме двигатель внутреннего сгорания, соединенный через редуктор с регулируемыми насосами, которые гидравлически соединены c гидромоторами, и блок управления.
Недостатком этой самоходной машины является ухудшение ее управляемости из-за невозможности в гидрообъемной трансмиссии блокировки дифференциального соединения колес каждого моста, а силовое рассогласование колес увеличивает расход топлива.
Для устранения отмеченных недостатков на сельскохозяйственном тракторе гидромоторы ведущих колес выполнены регулируемыми, на входах которых установлены датчики давления, соединенные со вторыми входами блока управления, вторые выходы которого соединены с исполнительными механизмами регулируемых гидромоторов.
На фиг. 1 представлен схематично предлагаемый сельскохозяйственный трактор;
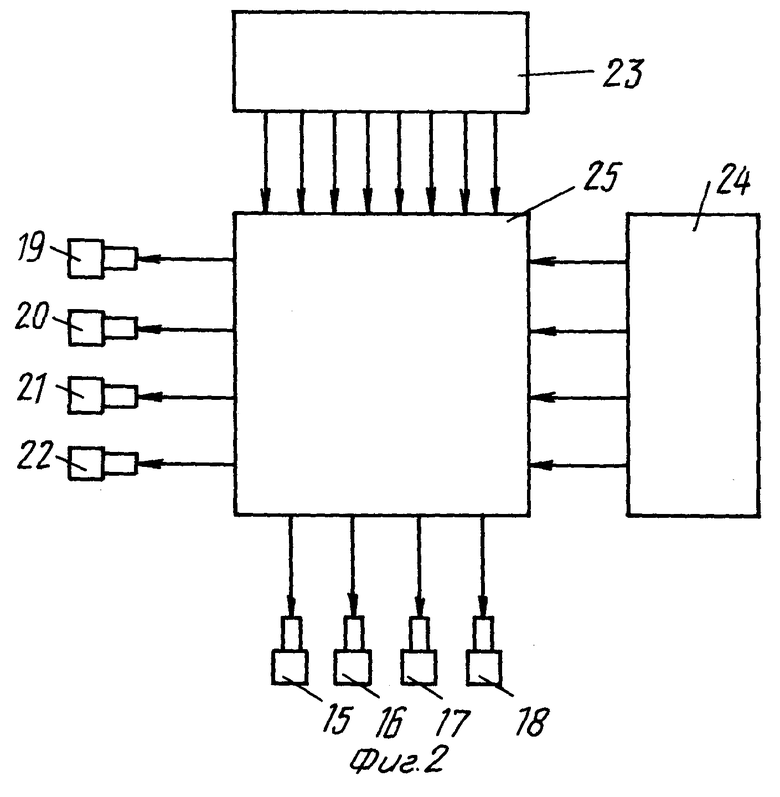
на фиг. 2 представлен блок управления.
Сельскохозяйственный трактор содержит установленный на раме двигатель внутреннего сгорания 1 (фиг. 1 не показано) с редуктором 2, соединенный с валами регулируемых насосов 3, 4, 5, 6. Насосы 3, 4, 5, 6 гидравлически связаны с регулируемыми гидромоторами 7, 8, 9, 10, валы которых соединены с колесами 11, 12, 13, 14 трактора. При этом колеса 11 и 12, например, образуют пару передних колес, а колеса 13 и 14 - заднюю пару.
Насосы 3, 4, 5, 6 снабжены исполнительными механизмами 15, 16, 17, 18 для изменения рабочего объема, а гидромоторы 7, 8, 9, 10 снабжены исполнительными механизмами 19, 20, 21, 22. В гидролиниях, соединяющих насосы и гидромоторы, установлены датчики давления 23. Колеса 11, 12, 13, 14 снабжены датчиками 24 частоты вращения.
Датчики давления 23 соединены с первым входом блока управления 25, а датчики частоты вращения 24 со вторым его входом. Исполнительные механизмы 15, 16, 17, 18 насосов соединены с первым выходом блока управления 25, а исполнительные механизмы 19, 20, 21, 22 гидромоторов - со вторым его выходом.
Во время движения трактора возникает кинематическое и силовое рассогласование между ведущими колесами, для устранения которых используются дифференциалы. Как известно, для трактора с одним двигателем число дифференциалов на единицу меньше числа ведущих колес (Лефанов А.Х. Дифференциалы автомобилей и тягачей. - М: Машиностроение, 1972, с. 4, 13-24). Например, трактор с четырьмя ведущими колесами должен иметь три дифференциала: по одному между передними и задними ведущими колесами и один между парой передних колес и парой задних.
Работает предлагаемый трактор следующем образом. Двигатель внутреннего сгорания 1 через редуктор 2 приводит во вращение валы насосов 3, 4, 5, 6 и затем гидромоторы 7, 8, 9, 10, которые связаны гидролиниями с насосами и вращают колеса 11, 12, 13, 14.
При прямолинейном движении трактора колеса 11, 12, 13, 14 имеют одинаковую частоту вращения n11 = n12 = n13 = n14, так как рабочие объемы насосов 3, 4, 5, 6 и гидромоторов 7, 8, 9, 10 равны между собой q3 = q4 = q5 = q6 и q7 = q8 = q9 = q10. Перепады давления на гидромоторах 7, 8, 9, 10 имеют равные значения, поэтому на осях колес 11, 12, 13, 14 будут создаваться равные крутящие моменты M11 = M12 = M13 = M14.
На предлагаемом тракторе функционирование дифференциалов воспроизводится путем изменения исполнительными механизмами 15, 16, 17, 18 рабочих объемов насосов 3, 4, 5, 6 и исполнительными механизмами 19, 20, 21, 22 рабочих объемов гидромоторов 7, 8, 9, 10 согласно изменению сигналов датчиков давления 23 и датчиков частоты вращения 24, поступающих в блок управления 25, пока не восстановится равенство перепадов давления на гидромоторах 7, 8, 9, 10.
При повороте трактора, например, налево колеса 11, 14 становятся забегающими, а на осях отстающих колес 12, 13 возникают тормозные моменты, то есть n11 > n12 n14 > n13, p9 > p10 p8 > p7 и M11 > M12 M13 > M14. Увеличиваются уровни сигналов от датчиков давления 23 гидромоторов 8; 9 и уменьшаются уровни сигналов от датчиков частоты вращения 24 колес 12 и 13, которые поступают в блок управления 25. Из блока управления 25 сигнал поступает на исполнительные механизмы 16, 17 насосов 4 и 5, которые уменьшают их рабочие объемы q4 и q5 до тех пор, пока перепады давления ни станут равны, то есть p7 = p8 = p9 = p10.
Если трактор поворачивает направо, то рабочие объемы насосов 3 и 6 (q3 и q6) уменьшаются и восстанавливается равенство перепадов давления на гидромоторах.
Поворот трактора создает кинематическое рассогласование между колесами каждой пары.
При буксовании одного колеса, например 14, частота вращения колеса 14 не изменяется, n11 = n12 = n13 = n14, а перепад давления p7 на гидромоторе 7 и развиваемый крутящий момент на колесе 14 уменьшаются, то есть p7 < p8 = p9 = p10 и M14 < M11 = M12 = M13. При этом уменьшается уровень сигналов от датчиков давления 23 гидромотора 14 и не изменяется уровень сигналов от датчика частоты вращения 24 колеса. Сигнал из блока управления 25 поступит на исполнительный механизм 19 гидромотора 7 и его рабочий объем q7 уменьшится, а перепад давления станет p7 = p8 = p9 = p10.
Если буксуют колеса одной пары, например 13 и 14, то уменьшаются рабочие объемы гидромоторов 7 и 8, то есть q7 и q8.
Буксование колес одной пары создает силовое рассогласование между передней и задней парами колес и является причиной неравномерного движения трактора, которое способствует увеличению расхода топлива.
При движении трактора задним ходом функционирование блока управления 25 не изменяется.
Таким образом, предполагаемое изобретение позволяет улучшить управляемость сельскохозяйственного трактора и уменьшить расход топлива.
Предполагаемое изобретение не оказывает отрицательного влияния на окружающую среду.
| название | год | авторы | номер документа |
|---|---|---|---|
| ТРАКТОР ДЛЯ СЕЛЬСКОХОЗЯЙСТВЕННЫХ РАБОТ | 1997 |
|
RU2141902C1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ПАРАМЕТРОВ КОЛЕБАНИЙ ВИБРАЦИОННЫХ РАБОЧИХ ОРГАНОВ ПОЧВООБРАБАТЫВАЮЩИХ МАШИН И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2001 |
|
RU2231241C2 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЯЕМОЙ БОРЬБЫ С СОРНЯКАМИ | 1997 |
|
RU2129785C1 |
| СПОСОБ ВНЕСЕНИЯ УДОБРЕНИЙ | 1999 |
|
RU2171574C1 |
| МНОГОКОРПУСНЫЙ ПЛУГ-РЫХЛИТЕЛЬ | 2000 |
|
RU2171557C1 |
| СПОСОБ ВНЕСЕНИЯ И СОХРАНЕНИЯ ПОЧВООБРАЗОВАТЕЛЕЙ В КОРНЕОБИТАЕМОМ ГОРИЗОНТЕ ПОЧВЫ И ОРУДИЕ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1998 |
|
RU2146433C1 |
| УСТРОЙСТВО ДЛЯ ПРИГОТОВЛЕНИЯ КОМПОСТОВ | 1991 |
|
RU2017706C1 |
| КОМБИНИРОВАННОЕ ПОЧВООБРАБАТЫВАЮЩЕЕ ОРУДИЕ | 1999 |
|
RU2161388C1 |
| СЦЕПНОЕ УСТРОЙСТВО | 1998 |
|
RU2147526C1 |
| ЛЕСНАЯ МАШИНА | 1995 |
|
RU2118262C1 |
Изобретение относится к области тракторного машиностроения, в частности к тракторам сельскохозяйственного назначения со всеми ведущими мостами. Трактор включает в себя установленный на раме двигатель внутреннего сгорания, соединенный через редуктор с регулируемыми насосами, которые гидравлически соединены с гидромоторами, приводящими во вращение колеса, и блок управления, входы которого соединены с датчиками частоты вращения колес, а выходы соединены с исполнительными механизмами. Гидромоторы ведущих колес выполнены регулируемыми. На их входах установлены датчики давления, соединенные с вторыми входами блока управления, вторые выходы которого соединены с исполнительными механизмами регулируемых гидромоторов. Изобретение позволит улучшить управляемость трактора и уменьшить расход топлива. 2 ил.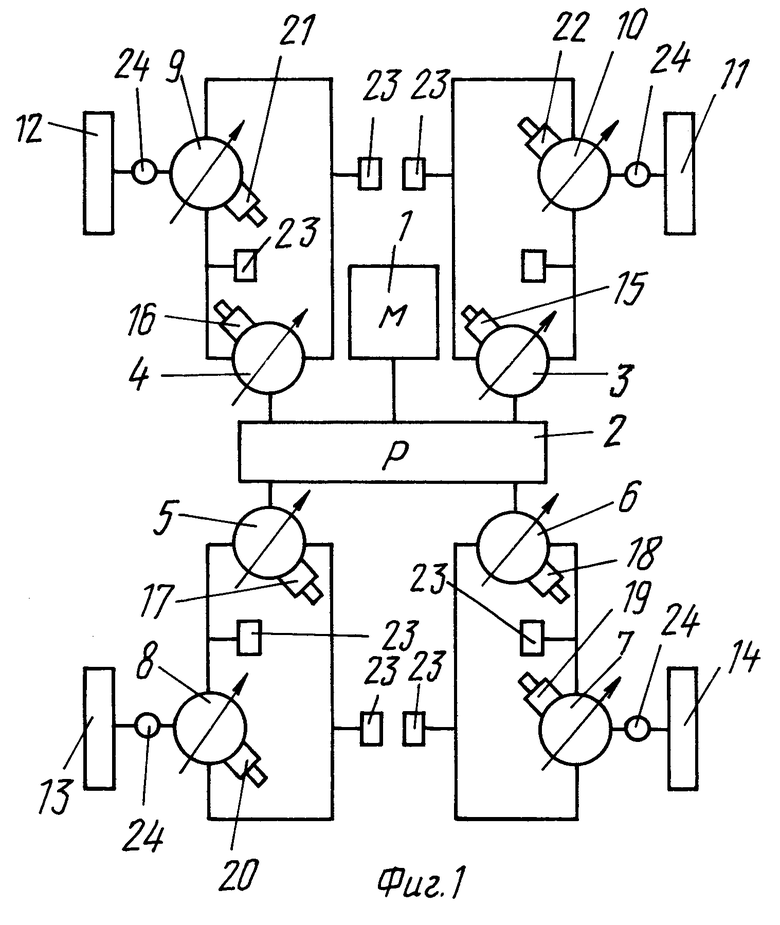
Сельскохозяйственный трактор, включающий установленный на раме двигатель внутреннего сгорания, соединенный через редуктор с регулируемыми насосами, которые гидравлически соединены с гидромоторами, приводящими во вращение колеса, и блок управления, входы которого соединены с датчиками частоты вращения колес, а выходы - с исполнительными механизмами, отличающийся тем, что гидромоторы ведущих колес выполнены регулируемыми, на их входах установлены датчики давления, соединенные с вторыми входами блока управления, вторые выходы которого соединены с исполнительными механизмами регулируемых гидромоторов.
| Гидрообъемная трансмиссия самоходной машины | 1972 |
|
SU518387A1 |
| Способ управления движением транспортного средства с бортовым поворотом гидрообъемного типа | 1986 |
|
SU1341069A1 |
| US 4546847 A, 15.10.85 | |||
| УСТАНОВКА ДЛЯ ПОЛУЧЕНИЯ (МЕТ)АКРИЛОВОЙ КИСЛОТЫ И СПОСОБ ПОЛУЧЕНИЯ (МЕТ)АКРИЛОВОЙ КИСЛОТЫ | 2004 |
|
RU2355673C2 |
