Изобретение относится к способам управления движением транспортных средств с бортовым поворотом.
Целью изобретения является улучшение управляемости транспортного средства;
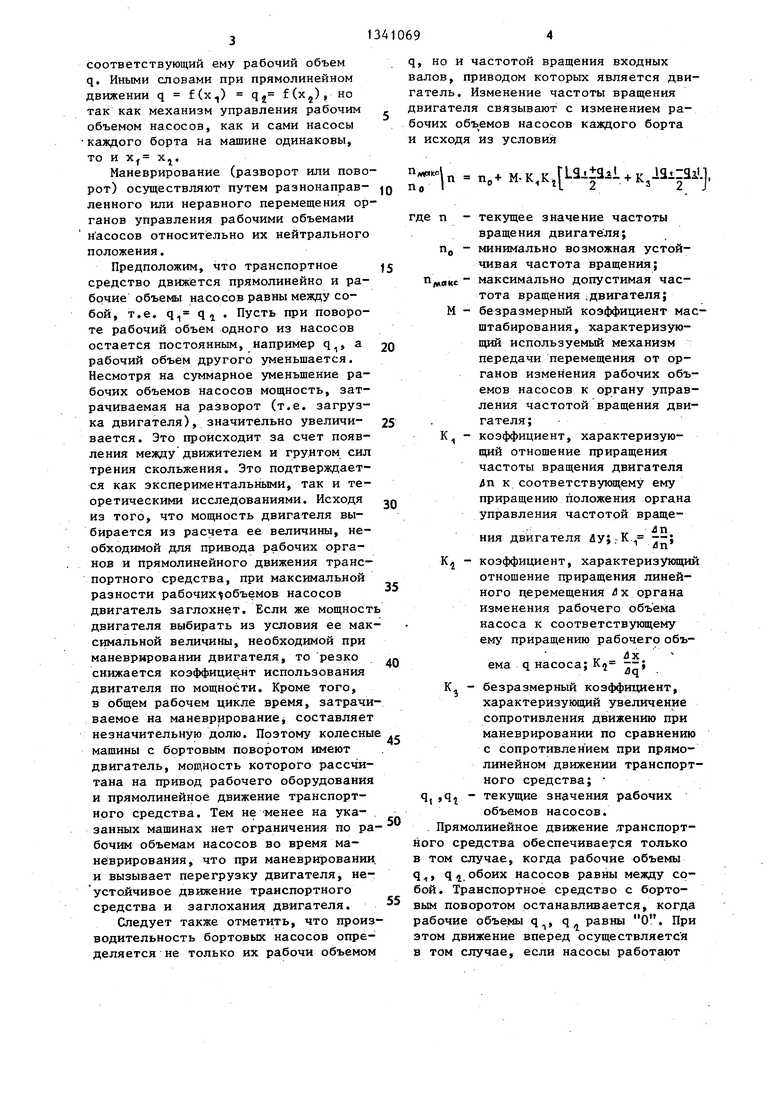
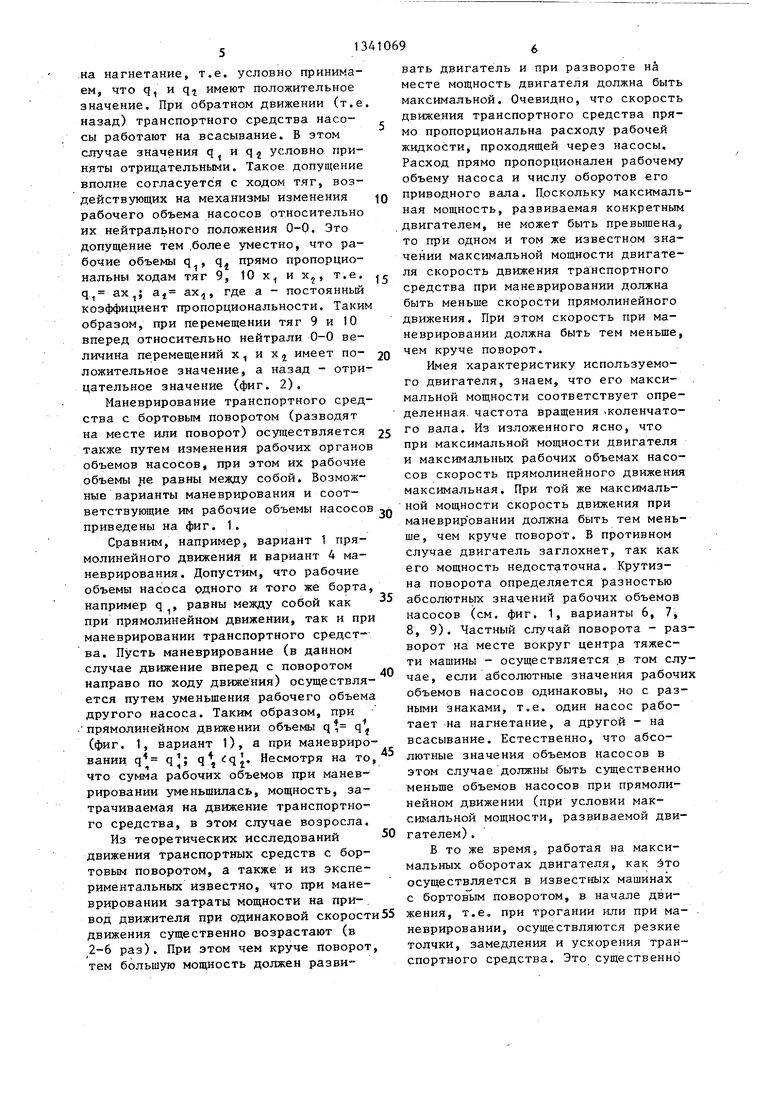
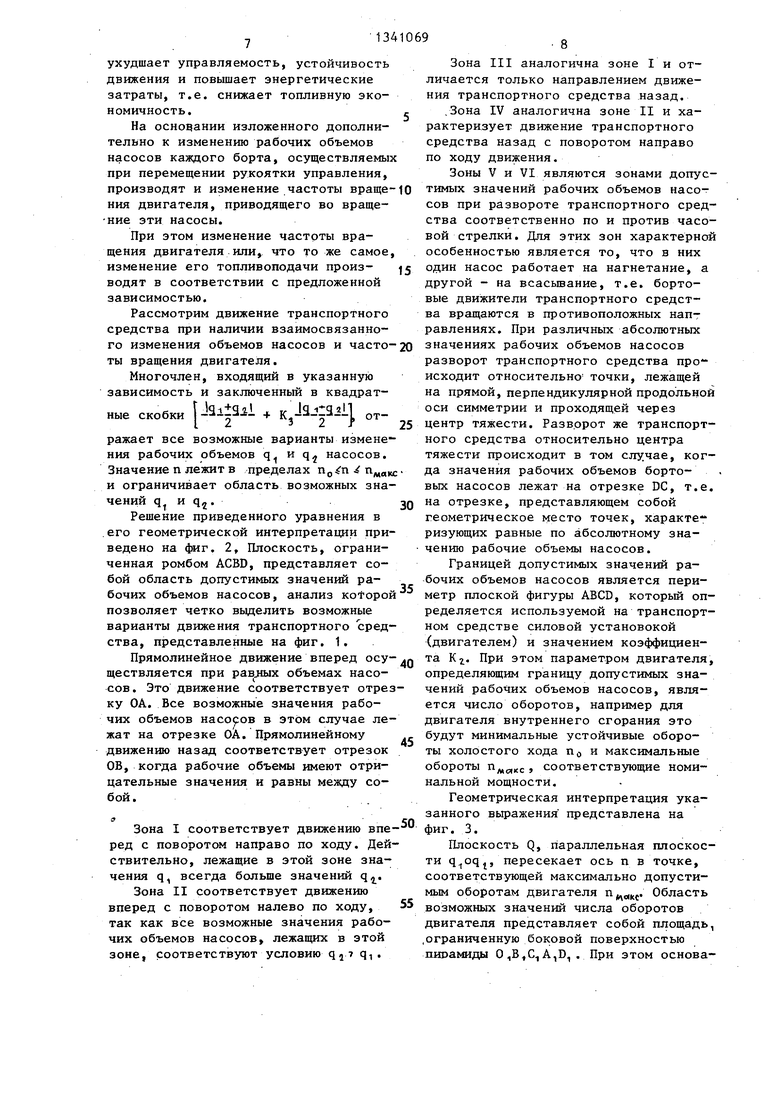
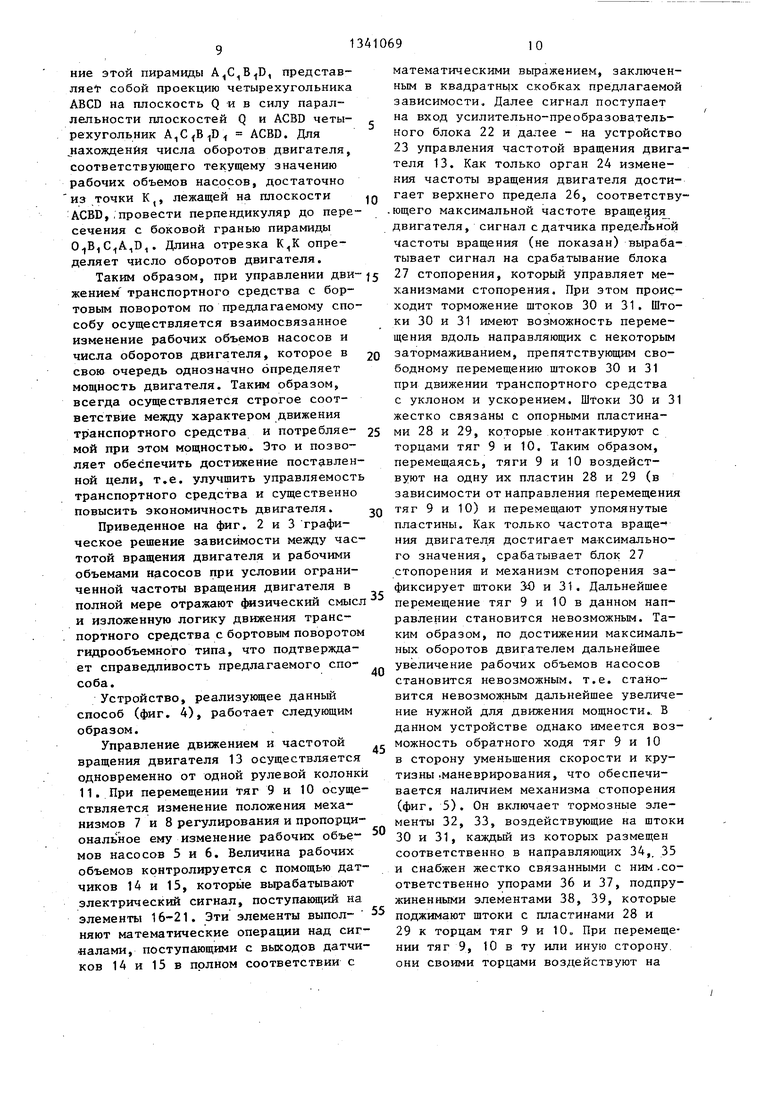
На фиг. 1 приведены схемы возможных вариантов движения транспортного средства с бортовым поворотом в зависимости от изменения рабочих объемов насосоэ; на фиг. 2 - график, показывающий область возможных значений рабочих объемов, ограниченную имеющимся диапазоном изменения рабочих скоростей двигателя; на фиг.З - .график, показывающий область возможных значений частоты вращения двигателя в зависимости от рабочих объемо транспортного средства; на фиг. 4 - схема устройства, реализующего предлагаемый способ; на фиг. 5 - схема механизма ограничения хода.
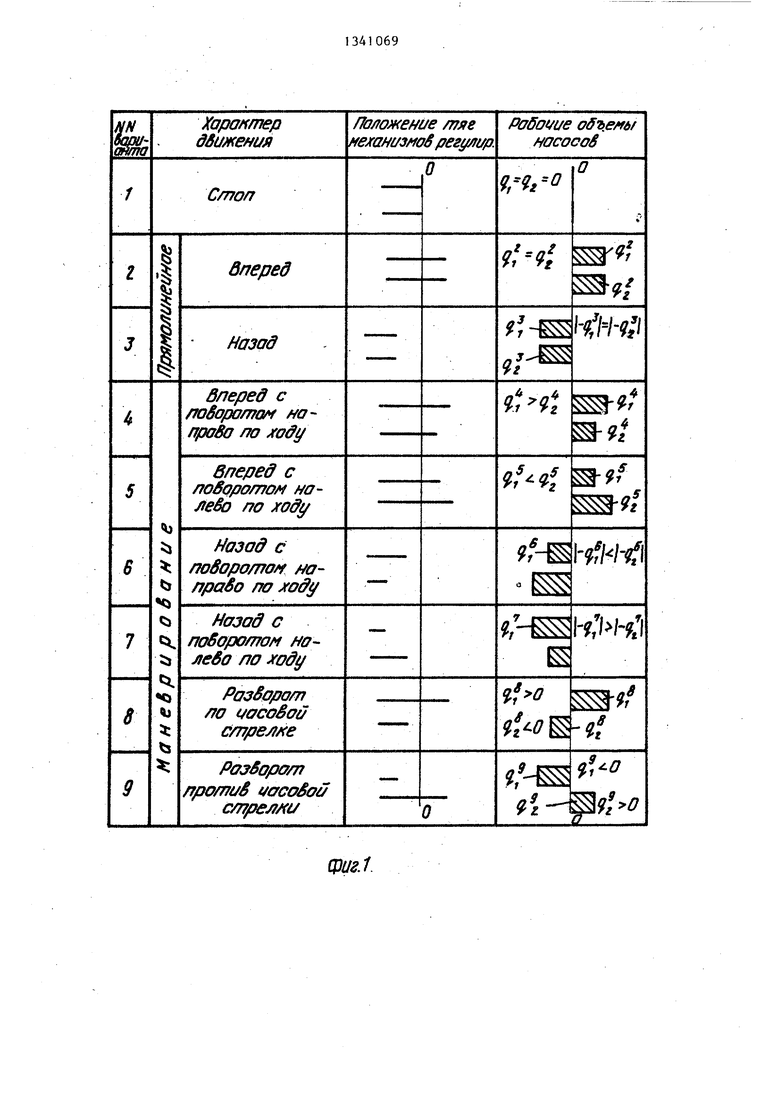
Транспортное средство включает двжители 1, 2 правого и левого бортов, приводимые от нерегулируемых гидромоторов 3 и 4, рабочая жидкость в которые поступает от регулируемых насосов 5 и 6. Для изменения рабочих объемов насосов 5 и 6 они снабжены механизмами 7, 8 регулирования, которые кинематически связаны с ми 9 и 10, величина и направление перемещения тяг 9 и 10 изменяется посредством рулевой колонки 11. Регулируемые насосы приводятся во вращение от раздаточного редуктора t2, входной вал которого соединен с двигателем 13. Значения рабочих объемов насосов 5 и 6 контролируются датчиками 14 и 15, которые вьфабатывают электрический сигнал положительной полярности при работе насоса на нагнетание и отрицательный - при работе на всасывание и прямо пропорциональный рабочим объемам насосов, Сигналы с датчиков 14 и 15 поступают на сумматор 16, в котором происходит сложение этих сигналов и на сумматор 17, в котором происходит вычитание сигналов. С выхода сумматора 16 абсолютная величина полученного значения поступает на вход умножителя 18 с умножителем ее на 1/2. С выхода сумматора 17 сигнал, представляющий собой модуль разности текущих значений рабочих объемов насосов, поступает на вход умножителя 19 с умножением его на Кз/2. Далее с выходов обо
5
0
0
5
их умножителей 18 и 19 сигналы поступают на входы сумматора 20, где происходит их сложение. С выхода сумма- тора 20 сигнал поступает на умножитель 21, где происходит его умножение на величину К,. С выхода умножителя 21 сигнал поступает на усилительно- преобразовательный блок 22, вырабаты0 вающий управляющий сигнал, поступающий на вход устройства 23 управления частотой вращения двигателя, выход которого связан с органом 24 измене- . ния частоты вращения. Орган 24 изменения частоты вращения имеет нижний 25 и верхний 26 пределы изменения. Нижний 25 предел изменения соответствует минимально возможной устойчивой частоте вращения двигателя. Эта частота соответствует нейтральному положению механизмов 7 и 8 регулирования рабочих объемов, при котором значения рабочих объемов насосов равны О. При достижении органом 24 изменения частоты нращения двигателя верхнего 26 предела вырабатывается сигнал соответствующим датчиком (не показан) предельной частоты вращения двигателя, который поступает на вход блока 27 стопорения тяг 9 и 10. Блок 27 стопорения имеет два выхода на механизмы стопорения, представляющие собой подвижные пластины 28 и 29, контактирующие с торцами тяг 9 и 10.
r Пластины снабжены штоками.30 и 31, установленными в направляющих. При этом механизм стопорения выполнен так, что при его срабатывании невозможно перемещение тяг 9 и 10 в сторону увеличения рабочих объемов насо0
сов, но возможно обратное их переме
щение.
Управление транспортными средствами с бортовым поворотом имеет ха- рактерные особенности, заключающиеся в следующем.
Прямолинейное движение транспортного средства осуществляется посредством одинакового для насосов каждого борта изменения их рабочего объема q, т.е. при прямолинейном движении объем насоса одного борта равен объему насоса другого борта. При этом изменение рабочих объемов насосов осуществляют путем линейного перемещения органа управления рабочим объемом. Таким образом, линейное перемещение органа управления рабочим объемом насоса однозначно определяет и
оответствующий ему рабочий объем . Иными словами при прямолинейном вижении q f(x) qj f(Xj), но так как механизм управления рабочим , объемом насосов, как и сами насосы каждого борта на машине одинаковы,
то и Х| Х.
Маневрирование (разворот или поворот) осуществляют путем разнонаправ- Q енного или неравного перемещения органов управления рабочими объемами н асосов относительно их нейтрального оложения.
Предположим, что транспортное 5 средство движется прямолинейно и рабочие объемы насосов равны между собой, т.е. q q . Пусть при повороте рабочий объем одного из насосов остается постоянным, например q,, а 20 рабочий объем другого уменьшается. Несмотря на суммарное уменьшение рабочих объемов насосов мощность, затрачиваемая на разворот (т.е. загрузка двигателя), значительно увеличи- 25 вается. Это происходит за счет появления между движителем и грунтом сил трения скольжения. Это подтверлда(ает- ся как экспериментальными, так и теоретическими исследованиями. Исходя ,Q из того, что мощность двигателя выбирается из расчета ее величины, необходимой для привода рабочих органов и прямолинейного движения транспортного средства, при максимальной разности рабочих объемов насосов двигатель заглохнет. Если же мощность двигателя выбирать из условия ее максимальной величины, необходимой при маневрировании двигателя, то резко снижается коэффициент использования двигателя по мощности. Кроме того, в общем рабочем цикле время, затрачиваемое на маневрированиеj составляет незначительную долю. Поэтому колесные машины с бортовым поворотом имеют двигатель, мощность которого рассчитана на привод рабочего оборудования и прямолинейное движение транспорт35
45
ного средства. Тем не менее на указанных машинах нет ограничения по ра бочим объемам насосов во время маневрирования, что при маневри ровании. и вызывает перегрузку двигателя, не- устойчивое дв1 жение транспортного средства и заглохания двигателя.
Следует также отметить, что производительность бортовых насосов определяется не только их рабочи объемом
q, но и частотой вращения входных валов, приводом которых является двигатель. Изменение частоты вращения двигателя связывают с изменением рабочих насосов каждого борта и исходя из условия
По
|n n,M.K,K,.,.
Q
5 20 25 ,Q
35
45
50
55
где п - текущее значение частоты вращения двигателя;
Пд - минимально возможная устойчивая частота вращения; 1 лАакс максимально допустимая частота вращения ;двигателя; М - безразмерный коэффициент масштабирования, характеризующий используемый механизм передачи перемещения от органов изменения рабочих объемов насосов к органу управления частотой вращения двигателя;
К - коэффициент, характеризую- пщй отношение приращения частоты вращения двигателя Лп к соответствующему ему приращению положения органа управления частотой враще„ 4п ния двигателя Ду;-К. --;
К - коэффициент, характеризующий отношение приращения линейного деремещения /1х органа изменения рабочего объема насоса к соответствующему ему приращению рабочего объЛхема q насоса; К --;
К - безразмерный коэффициент, характеризующий увеличение сопротивления движению при маневрировании по сравнению с сопротивлением при прямолинейном движении транспортного средства; Ч, Чг текущие значения рабочих
объемов насосов.
Прямолинейное движение д-ранспорт- ного средства обеспечивается только в том случае, когда рабочие объемы Я q.обоих насосов равны между собой. Транспортное средство с бортовым поворотом останавливается, когда рабочие объемы q, q равны О. При этом движение вперед осуществляете в том случае, если насосы работают
5
на нагнетание, т.е. условно принимаем, что q, и q имеют положительное значение. При обратном движении (т.е. назад) транспортного средства насосы работают на всасывание. В этом случае значения q и q условно приняты отрицательными. Такое допущение вполне согласуется с ходом тяг, воздействующих на механизмы изменения рабочего объема насосов относительно их нейтрального положения 0-0. Это допущение тем .более уместно, что рабочие объемы q , нальны ходам тяг
Ч коэффициент пропорциональности. Таким
образом, при перемещении тяг 9 и 10 вперед относительно нейтрали 0-0 величина перемещений х.
1 ЗА 1069
10
q, прямо пропорцио- 9, 10 X и Xj, т.е. q а ах,, где а - постоянный
15
20
30
и Xj имеет положительное значение, а назад - отрицательное значение (фиг. 2).
Маневрирование транспортного средства с бортовым поворотом (разводят на месте или поворот) осу1цествляется 25 также путем изменения рабочих органов объемов насосов, при этом их рабочие объемы ,не равны между собой. Возможные варианты маневрирования и соответствующие им рабочие объемы насосов приведены на фиг. 1.
Сравним, например, вариант 1 прямолинейного движения и вариант 4 маневрирования. Допустим, что рабочие объемБ насоса рдного и того же борта, например q, равны между собой как при прямолинейном движении, так и при маневрировании транспортного средства. Пусть маневрирование (в данном случае движение вперед с поворотом направо по ходу движения) осуществляется путем уменьшения рабочего объема другого насоса. Таким образом, при прямолинейном движении объемы q t q (фиг. 1, вариант 1), а при маневрировании q q ; Ч Несмотря на то, что сумма рабочих объемов при маневрировании уменьшилась, мощность, затрачиваемая на движение транспортного средства, в этом случае возросла.
Из теоретических исследований движения транспортных средств с бортовым поворотом, а также и из экспериментальных известно, что при маневрировании затраты мощности на привать двигатель и при развороте ни месте мощность двигателя должна быть максимальной. Очевидно, что скорость движения транспортного средства прямо пропорциональна расходу рабочей жидкости, проходящей через насосы. Расход прямо пропорционален рабочему объему насоса и числу оборотов его приводного вала. Поскольку максимальная мощность, развиваемая конкретным двигателем, не может быть превышена, то при одном и том же известном значении максимальной мощности двигателя скорость движения транспортного средства при маневрировании должна быть меньше скорости прямолинейного движения. При этом скорость при маневрировании должна быть тем меньше, чем круче поворот.
Имея характеристику используемого двигателя, знаем, что его максимальной мощности соответствует определенная, частота вращения коленчато- го вала. Из изложенного ясно, что при максимальной мощности двигателя и максимальных рабочих объемах насосов скорость прямолинейного движения максимальная. При той же максимальной мощности скорость движения при маневрир овании должна быть тем меньше, чем круче поворот. В противном случае двигатель заглохнет, так как его мощность недостаточна. Крутизна поворота определяется разностью абсолютньк значений рабочих объемов насосов (см. фиг. 1, варианты 6, 7, 8, 9). Частный случай поворота - разворот на месте вокруг центра тяжести машины - осуществляется в том случае, если абсолютные значения рабочих объемов насосов одинаковы, но с разными знаками, т.е. один насос работает на нагнетание, а другой - на всасывание. Естественно, что абсолютные значения объемов насосов в этом случае должны быть существенно меньше объемов насосов при прямолинейном движении (при условии максимальной мощности, развиваемой дви- 50 гателем).
В то же время,, работая на максимальных оборотах двигателя, как дто осуществляется в известных машинах с бортовь1М поворотом, в начале дви35
40
вод движителя при одинаковой скорости55 женин, т.е. при трогании или при мадвижения существенно возрастают (в 2-6 раз). При этом чем круче поворот, тем большую мощность должен развиневрировании, осуществляются резкие толчки, замедления и ускорения транспортного средства. Это существенно
1 ЗА 1069
5
0
0
5
вать двигатель и при развороте ни месте мощность двигателя должна быть максимальной. Очевидно, что скорость движения транспортного средства прямо пропорциональна расходу рабочей жидкости, проходящей через насосы. Расход прямо пропорционален рабочему объему насоса и числу оборотов его приводного вала. Поскольку максимальная мощность, развиваемая конкретным двигателем, не может быть превышена, то при одном и том же известном значении максимальной мощности двигателя скорость движения транспортного средства при маневрировании должна быть меньше скорости прямолинейного движения. При этом скорость при маневрировании должна быть тем меньше, чем круче поворот.
Имея характеристику используемого двигателя, знаем, что его максимальной мощности соответствует определенная, частота вращения коленчато- го вала. Из изложенного ясно, что при максимальной мощности двигателя и максимальных рабочих объемах насосов скорость прямолинейного движения максимальная. При той же максимальной мощности скорость движения при маневрир овании должна быть тем меньше, чем круче поворот. В противном случае двигатель заглохнет, так как его мощность недостаточна. Крутизна поворота определяется разностью абсолютньк значений рабочих объемов насосов (см. фиг. 1, варианты 6, 7, 8, 9). Частный случай поворота - разворот на месте вокруг центра тяжести машины - осуществляется в том случае, если абсолютные значения рабочих объемов насосов одинаковы, но с разными знаками, т.е. один насос работает на нагнетание, а другой - на всасывание. Естественно, что абсолютные значения объемов насосов в этом случае должны быть существенно меньше объемов насосов при прямолинейном движении (при условии максимальной мощности, развиваемой дви- 0 гателем).
В то же время,, работая на максимальных оборотах двигателя, как дто осуществляется в известных машинах с бортовь1М поворотом, в начале дви5
0
неврировании, осуществляются резкие толчки, замедления и ускорения транспортного средства. Это существенно
ухудшает управляемость, устойчивость движения и повышает энергетические затраты, т.е. снижает топливную экономичность,
На основании изложенного дополнительно к изменению рабочих объемов насосов каждого борта, осуществляемых при перемещении рукоятки управления, производят и изменение частоты вращения двигателя, приводящего во враще- ние эти насосы.
При этом изменение частоты вращения двигателя или, что то же самое.
изменение его топливоподачи производят в соответствии с предложенной зависимостью.
Рассмотрим движение транспортного средства при наличии взаимосвязанного изменения объемов насосов и часто-20 значениях рабочих объемов насосов
ты вращения двигателя.
Многочлен, входящий в указанную зависимость и заключенный в квадратные скобки
J3i±3ii K,-laj:3 iJ о,
ражает все возможные варианты изменения рабочих объемов q и q насосов. Значение п лежит в пределах ,у. и ограничивает область возможных значений q и q.
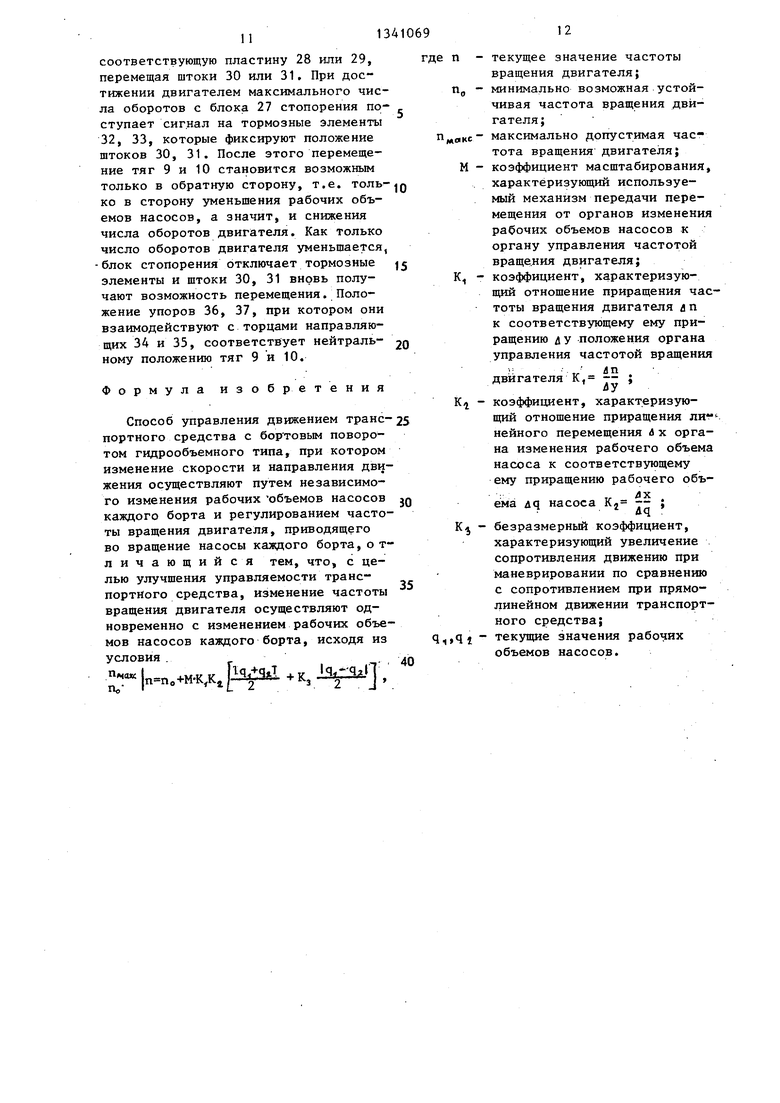
Решение приведенного уравнения в .его геометрической интерпретации приведено на (|иг. 2, Плоскость, ограниченная ромбом ACBD, представляет собой область допустимых значений рабочих объемов насосов, анализ которой позволяет четко выделить возможные варианты движения транспортного средства, представленные на фиг. 1.
Прямолинейное движение вперед осуществляется при равлых объемах насосов. Это движение соответствует отрезку ОА. Все возможные значения рабочих объемов насосов в этом случае лежат на отрезке ОА. Прямолинейному движению назад соответствует отрезок ОБ, когда рабочие объемы имеют отрицательные значения и равны между собой.
Зона I соответствует движению впе ред с поворотом направо по ходу. Действительно, лежащие в этой зоне значения q, всегда больше значений q.
Зона II соответствует движению вперед с поворотом налево по ходу, так как все возможные значения рабочих объемов насосов, лежащих в этой зоне, соответствуют условию qj q, .
Зона III аналогична зоне I и отличается только направлением движения транспортного средства назад.
.Зона IV аналогична зоне II и характеризует движение транспортного средства назад с поворотом направо по ходу движения.
Зоны V и VI являются зонами допустимых значений рабочих объемов насосов при развороте транспортного средства соответственно по и против часовой стрелки. Для этих зон характерной особенностью является то, что в них один насос работает на нагнетание, а другой - на всасьшание, т.е. бортовые движители транспортного средства вращаются в противоположных напт равлениях. При различных абсолютных
25
30
35
40
45
50
разворот транспортного средства происходит относительно точки, лежащей на прямой, перпендикулярной продольной оси симметрии и проходящей через центр тяжести. Разв.орот же транспортного средства относительно центра тяжести происходит в том случае, когда значения рабочих объемов бортовых насосов лежат на отрезке DC, т.е. на отрезке, представляющем собой геометрическое место точек, характеризующих равные по а.бсолютному значению рабочие объемы насосов.
Границей допустимых значений рабочих объемов насосов является периметр плоской фигуры ABCD, который определяется используемой на транспортном средстве силовой установокой (двигателем) и значением коэффициента Kj. При этом параметром двигателя, определяющим границу допустимых значений рабочих объемов насосов, является число оборотов, например для двигателя внутреннего сгорания это будут минимальные устойчивые обороты холостого хода Пд и максимальные обороты ,(-, соответствующие номинальной мощности.
Геометрическая интерпретация указанного выражения представлена на фиг. 3.
Плоскость Q, параллельная плоскости q.,oqj, пересекает ось п в точке, соответствующей максимально допусти55
мым оборотам двигателя п
WolKf
Область
возможных значений числа оборотов двигателя представляет собой площадь, .ограниченную боковой поверхностью пирамиды О ,В.,С, A,D, . При этом основа-
ние этой пирамиды , представ- ляе собой проекцию четырехугольника ABCD на плоскость Q и в силу параллельности плоскостей Q и ACBD четырехугольник A,C|B,D ACBD. Для нахождения числа оборотов двигателя, соответствующего текущему значению рабочих объемов нас.осов, достаточно из точки К, лежащей на плоскости ACBD,.провести перпендикуляр до пересечения с боковой гранью пирамиды ,,D,. Длина отрезка определяет число оборотов двигателя.
Таким образом, при управлении движением транспортного средства с бортовым поворотом по предлагаемому способу осуществляется взаимосвязанное изменение рабочих объемов насосов и числа оборотов двигателя, которое в свою очередь однозначно определяет мощность двигателя. Таким образом, всегда осуществляется строгое соответствие между характером движения транспортного средства и потребляемой при зтом мощностью. Это и позволяет обеспечить достижение поставленной цели, т.е. улучшить управляемость транспортного средства и существенно повысить экономичность двигателя.
Приведенное на фиг. 2 и 3 графическое решение зависимости между частотой вращения двигателя и рабочими объемами насосов при условии ограниченной частоты вращения двигателя в полной мере отражают физический смысл и изложенную логику движения транспортного средства с бортовым поворотом гидрообъемного типа, что подтверждает справедливость предлагаемого способа.
Устройство, реализующее данный способ (фиг. 4), работает следующим образом.
Управление движением и частотой вращения двигателя 13 осуществляется одновременно от одной рулевой колонки 11. При перемещении Тяг 9 и 10 осуществляется изменение положения механизмов 7 и 8 регулирования и пропорци10
15
20
25
математическими выражением, заключен ным в квадратных скобках предлагаемо зависимости Далее сигнал поступает на вход усилительно-преобразовательного блока 22 и далее - на устройств 23 управления частотой вращения двиг теля 13. Как только орган 24 изменения частоты вращения двигателя дости гает верхнего предела 26, соответств -ющего максимальной частоте вращения двигателя, сигнал сдатчика предельной частоты вращения (не показан) выраба тывает сигнал на срабатывание блока 27 стопорения, который управляет механизмами стопорения. При этом проис ходит торможение штоков 30 и 31. Што ки 30 и 31 имеют возможность перемещения вдоль направляющих с некоторым затормаживанием, препятствующим свободному перемещению штоков 30 и 31 при движении транспортного средства с уклоном и ускорением. ШТоки 30 и 3 жестко связаны с опорными пластинами 28 и 29, которые контактируют с торцами тяг 9 и 10. Таким образом, перемещаясь, тяги 9 и 10 воздействуют на одну их пластин 28 и 29 (в зависимости от направления перемещения тяг 9 и 10) и перемещают упомянутые пластины. Как только частота враще- ния двигателя достигает максимального значения, срабатывает блок 27 стопорения и механизм стопорения зафиксирует штоки 3 и 31. Дальнейшее перемещение тяг 9 и 10 в данном направлении становится невозможным. Таким образом, по достижении максималь ных оборотов двигателем дальнейшее увеличение рабочих объемов насосов становится невозможным, т.е. становится невозможным дальнейшее увеличе ние нужной для движения мощности.. В данном устройстве однако имеется воз
.,. можность обратного ходя тяг 9 и 10
4э
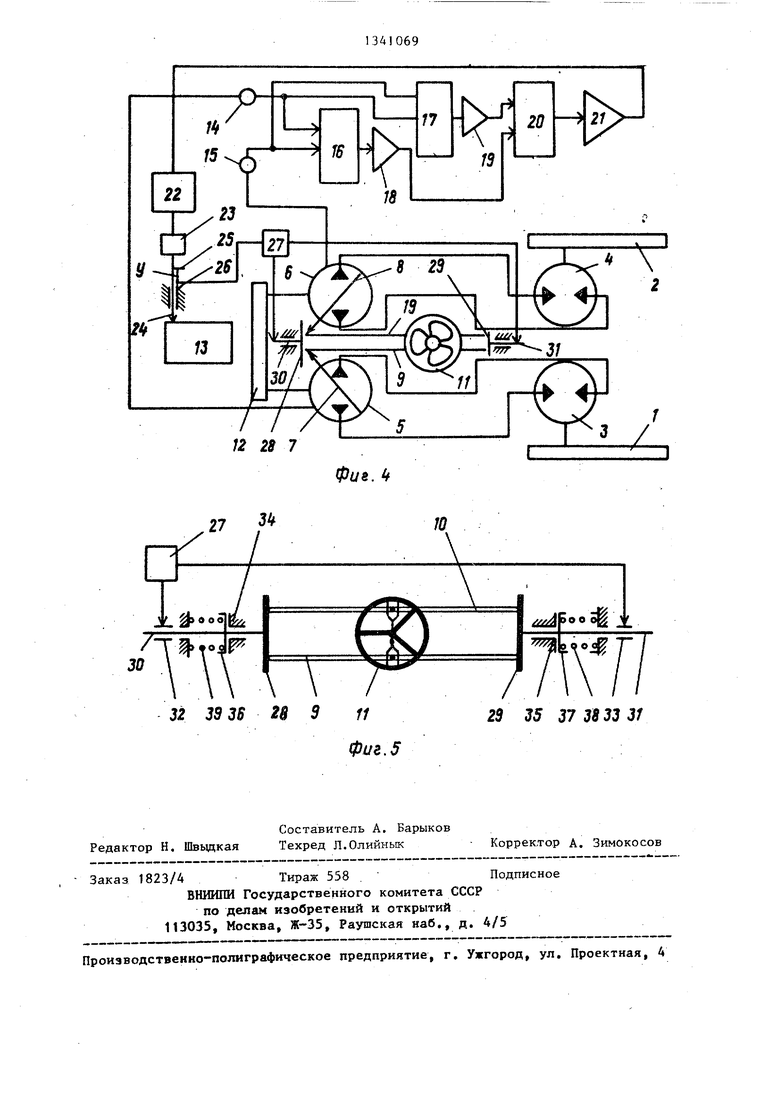
в сторону уменьшения скорости и крутизны -маневрирования, что обеспечивается наличием механизма стопорения (фиг. 5). Он включает тормозные элементы 32, 33, воздействующие на шток
30
35
40
ональное ему изменение рабочих объе- 30 и 31, каждый из которых размещен мов насосов 5 и 6. Величина рабочих соответственно в направляющих 34,. 35 объемов контролируется с помощью датчиков 14 и 15, которые вьфабатывают электрический сигнал, поступанмций на
55
и снабжен жестко связанными с ним .соответственно упорами 36 и 37, подпружиненными элементами 38, 39, которые поджимают штоки с пластинами 28 и 29 к торцам тяг 9 и 10„ При перемещении тяг 9, 10 в ту или иную сторону, они своими торцами воздействуют на
элементы 16-21. Эти элементы выпол
няют математические операции над сигналами, поступающими с выходов датчиков
14 и 15 в полном соответствии с
математическими выражением, заключенным в квадратных скобках предлагаемой зависимости Далее сигнал поступает на вход усилительно-преобразовательного блока 22 и далее - на устройство 23 управления частотой вращения двигателя 13. Как только орган 24 изменения частоты вращения двигателя достигает верхнего предела 26, соответству- -ющего максимальной частоте вращения двигателя, сигнал сдатчика предельной частоты вращения (не показан) вырабатывает сигнал на срабатывание блока 27 стопорения, который управляет механизмами стопорения. При этом происходит торможение штоков 30 и 31. Штоки 30 и 31 имеют возможность перемещения вдоль направляющих с некоторым затормаживанием, препятствующим свободному перемещению штоков 30 и 31 при движении транспортного средства с уклоном и ускорением. ШТоки 30 и 31 жестко связаны с опорными пластинами 28 и 29, которые контактируют с торцами тяг 9 и 10. Таким образом, перемещаясь, тяги 9 и 10 воздействуют на одну их пластин 28 и 29 (в зависимости от направления перемещения тяг 9 и 10) и перемещают упомянутые пластины. Как только частота враще- ния двигателя достигает максимального значения, срабатывает блок 27 стопорения и механизм стопорения зафиксирует штоки 3 и 31. Дальнейшее перемещение тяг 9 и 10 в данном направлении становится невозможным. Таким образом, по достижении максимальных оборотов двигателем дальнейшее увеличение рабочих объемов насосов становится невозможным, т.е. становится невозможным дальнейшее увеличение нужной для движения мощности.. В данном устройстве однако имеется возможность обратного ходя тяг 9 и 10
в сторону уменьшения скорости и крутизны -маневрирования, что обеспечивается наличием механизма стопорения (фиг. 5). Он включает тормозные элементы 32, 33, воздействующие на штоки
30 и 31, каждый из которых размещен соответственно в направляющих 34,. 35
30 и 31, каждый из которых размещен соответственно в направляющих 34,. 35
55
и снабжен жестко связанными с ним .соответственно упорами 36 и 37, подпружиненными элементами 38, 39, которые поджимают штоки с пластинами 28 и 29 к торцам тяг 9 и 10„ При перемещении тяг 9, 10 в ту или иную сторону, они своими торцами воздействуют на
соответствующую пластину 28 или 29, перемещая штоки 30 или 31, При достижении двигателем максимального числа оборотов с блока 27 стопорения поступает сигнал на тормозные элементы 32, 33, которые фиксируют положение штоков 30, 31. После этого перемещение тяг 9 и 10 становится возможным только в обратную сторону, т.е. ТОЛЬко в сторону уменьшения рабочих объемов насосов, а значит, и снижения числа оборотов двигателя. Как только число оборотов двигателя уменьшается, блок стопорения отключает тормозные элементы и штоки 30, 31 вновь получают возможность перемещения. Положение упоров 36, 37, при котором они взаимодействуют с торцами направляющих 34 и 35, соответствует нейтраль- ному положению тяг 9 и 10.
Формула изобретения
Способ управления движением транспортного средства с бор товым поворотом гидрообъемного типа, при котором изменение скорости и направления движения осуществляют путем независимого изменения рабочих объемов насосов каждого борта и регулированием частоты вращения двигателя, приводящего во вращение насосы каждого борта,о т- личающийся тем, что, с целью улучшения управляемости транс- портИого средства, изменение частоты вращения двигателя осуществляют одновременно с изменением рабочих объемов насосов каждого борта, исходя из
г, . .. ...:
|п по-ьм.к,к р + К,
iq« qaiT
3 2 J
где п - текущее значение частоты
вращения двигателя; Пд - минимально возможная устойчивая частота вращения двигателя;
максимально допустимая частота вращения двигателя; М - коэффициент масштабирования, характеризующий используемый механизм передачи перемещения от органов изменения рабочих объемов насосов к органу управления частотой враще.ния двигателя; К - коэффициент, характеризующий отношение приращения частоты вращения двигателя а п к соответствующему ему приращению 1у положения органа управления частотой вращения
:: „ йп
двигателя к, - ;
K-i - коэффициент, характеризующий отношение приращения лиг, нейного перемещения их органа изменения рабочего объема насоса к соответствующему ему приращению рабочего объ
ема дя насоса Kj - ;
К - безразмерный коэффициент, характеризующий увеличение сопротивления движению при маневрировании по сравнению с сопротивлением при прямолинейном движении транспортного средства;
ЧоЧг текущие значения рабочих объемов насосов.
фг/г/.
фиг. 2
фиб. J
Фив. 4
27
52 39 3S и 9 11
фи.5
Составитель А. Барыков Редактор Н. ШвыдкаяТехред Л.Олийнык
Заказ 1823/4Тираж 558 .Подписное
ВНШПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
29 35 37 3833 31
Корректор А. ЗимокосоБ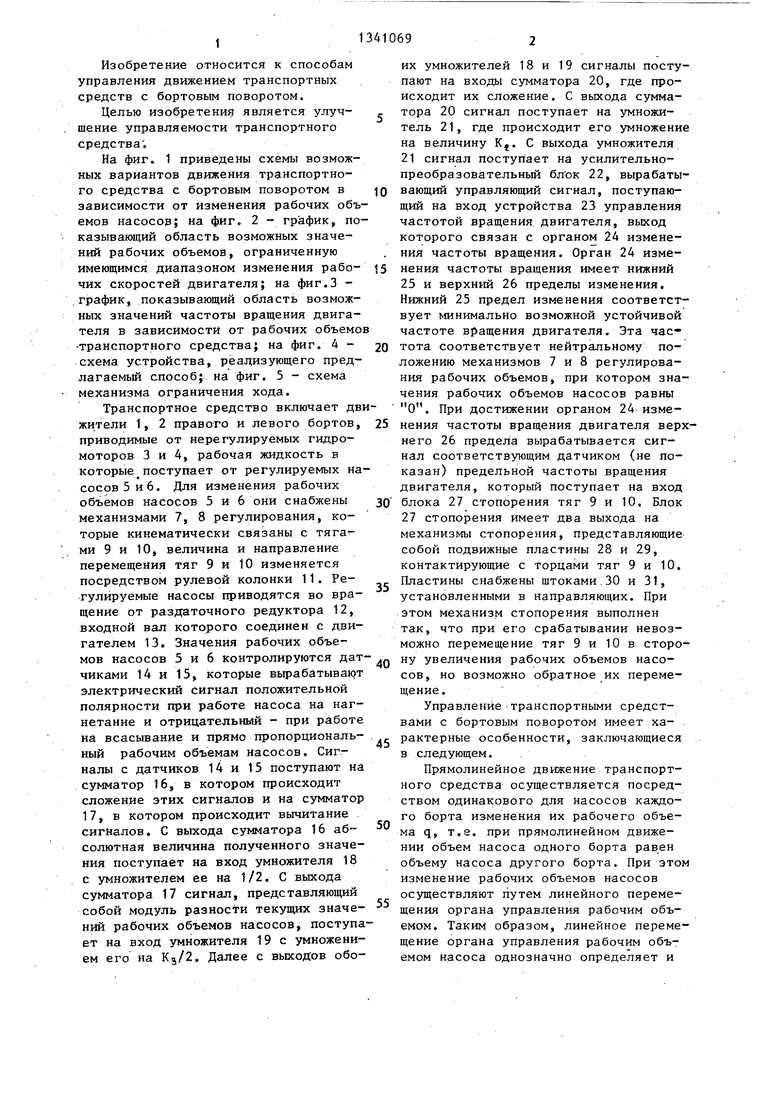
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство управления транспортным средством | 1989 |
|
SU1705143A1 |
| Устройство управления гидрообъемной трансмиссией транспортного средства с бортовым поворотом | 1987 |
|
SU1442434A2 |
| Устройство управления гидрообъемной трансмиссией транспортного средства с бортовым поворотом | 1986 |
|
SU1344634A1 |
| Устройство управления гидравлической трансмиссией транспортного средства с бортовым поворотом | 1986 |
|
SU1341068A1 |
| ГУСЕНИЧНЫЙ ТРАКТОР | 2008 |
|
RU2385249C1 |
| ТРАНСПОРТНОЕ СРЕДСТВО | 2002 |
|
RU2224678C1 |
| УСТРОЙСТВО ДЛЯ РЕГУЛИРОВАНИЯ ДВУХ ДВИГАТЕЛЕЙ АВТОМОБИЛЯ | 1990 |
|
RU2018014C1 |
| Система управления транспортного средства | 1985 |
|
SU1311954A1 |
| АМФИБИЙНОЕ СУДНО НА СЖАТОМ ПНЕВМОПОТОКЕ | 2014 |
|
RU2552581C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ДВИЖЕНИЕМ ТРАНСПОРТНОГО СРЕДСТВА | 2001 |
|
RU2187437C1 |

Изобретение относится к способам управления движением транспортного средства с бортовым поворотом, имеющего как колесные, так и гусеничные движители. Цель изобретения улучшение управляемости транспортного средства. Управление движением транспортного средства осуществляют путем независимого изменения рабочих объемов насосов каждого борта при одновременном изменении частоты вращения двигателя, приводящего во вращение входные валы насосов. При этом изменение частоты вращения осуществляют по определенному закону, свя- зьшающему рабочие -объемы насосов с частотой вращения двигателя. Такое управление позволяет ограничить рабочие объемы насосов при маневрировании транспортного средства, что исключает перегрузку двигателя и его заглохание. В нейтральном же положении органов управления рабочими объемами насосов, когда рабочие объемы насосов равны нулю, число оборотов двигателя устанавливается равным значению числа оборотов холостого хода. 5 ил. (Л с со 4;: О5 со
| УСТРОЙСТВО для УПРАВЛЕНИЯ ГИДРОСТАТИЧЕСКОЙ | 0 |
|
SU281189A1 |
| Способ получения молочной кислоты | 1922 |
|
SU60A1 |
