Изобретение относится к машиностроению, в частности к средствам измерения линейных перемещений.
Известно устройство для измерения координат точек поверхности, содержащее два измерительных преобразователя и два гибких элемента, связанных с рычагом (А.С. России N 1628650, кл. G 01 B 5/004, бюл. N 17 от 19.06.1995 г. ).
Недостатком этого устройства являются ограниченные возможности измерения, сложная перенастройка устройства при необходимости расширения измеряемого участка.
Наиболее близким техническим решением является устройство для измерения геометрических размеров тела и его положения в пространстве, содержащее базовые точки, телескопические штанги, на выдвижных стержнях которых нанесены шкалы, однокоординатные преобразователи линейных перемещений, концы которых связаны с базовыми точками и концами выдвижных стержней, и вычислительно-регистрирующий блок, электрически связанный с преобразователями (А.С. СССР N 1548652, кл. G 01 B 5/00, бюл. N 9 от 07.03.1990 г.).
Недостатком этого устройства являются ограниченные возможности измерения при значительных угловых перемещениях тела.
Изобретение решает задачу определения координат тела на плоскости.
Технический эффект заключается в расширении диапазона измерения угловых перемещений тела относительно его вертикальной оси.
Для достижения указанного технического эффекта в устройстве для определения положения тела на плоскости, содержащем базовые точки, телескопические штанги, на выдвижных стержнях которых нанесены шкалы, однокоординатные преобразователи линейных перемещений, концы которых связаны с базовыми точками и концами выдвижных стрежней, и вычислительно-регистрирующий блок, электрически связанный с преобразователями линейных перемещений, согласно изобретению две телескопические штанги выполнены взаимно параллельными, расположенными в вертикальной поперечной плоскости тела, на котором закреплена нижняя телескопическая штанга, конец выдвижного стержня нижней телескопической штанги связан вертикальной стойкой с верхней телескопической штангой, на конце выдвижного стержня которой установлена вторая вертикальная стойка, каждая стойка связана шарниром с преобразователем линейного перемещения, который другим концом связан с соответствующей базовой точкой, выполненной в виде вертикального стержня.
Вертикальные стержни выполнены разновысокими.
Сопоставительный анализ с прототипом показывает, что заявляемое устройство для определения положения тела на плоскости отличается тем, что две телескопические штанги выполнены взаимно параллельными, расположенными в вертикальной поперечной плоскости тела, на котором закреплена нижняя телескопическая штанга, конец выдвижного стержня нижней телескопической штанги связан вертикальной стойкой с верхней телескопической штангой, на конце выдвижного стержня которой установлена вторая вертикальная стойка, каждая стойка связана шарниром с преобразователем линейного перемещения, который другим концом связан с соответствующей базовой точкой, выполненной в виде вертикального стержня. Вертикальные стержни выполнены разновысокими. Таким образом, заявляемое устройство для определения положения тела на плоскости соответствует критерию "новизна".
Сравнение заявляемого устройства для определения положения тела на плоскости с другими техническими решениями в области машиностроения не выявило в них признаков, отличающих заявляемое решение от прототипа, что говорит о соответствии предлагаемого решения критерию "изобретательский уровень".
Расширение диапазона измерения угловых перемещений тела происходит вследствие возможности перемещения тела вокруг его вертикальной оси.
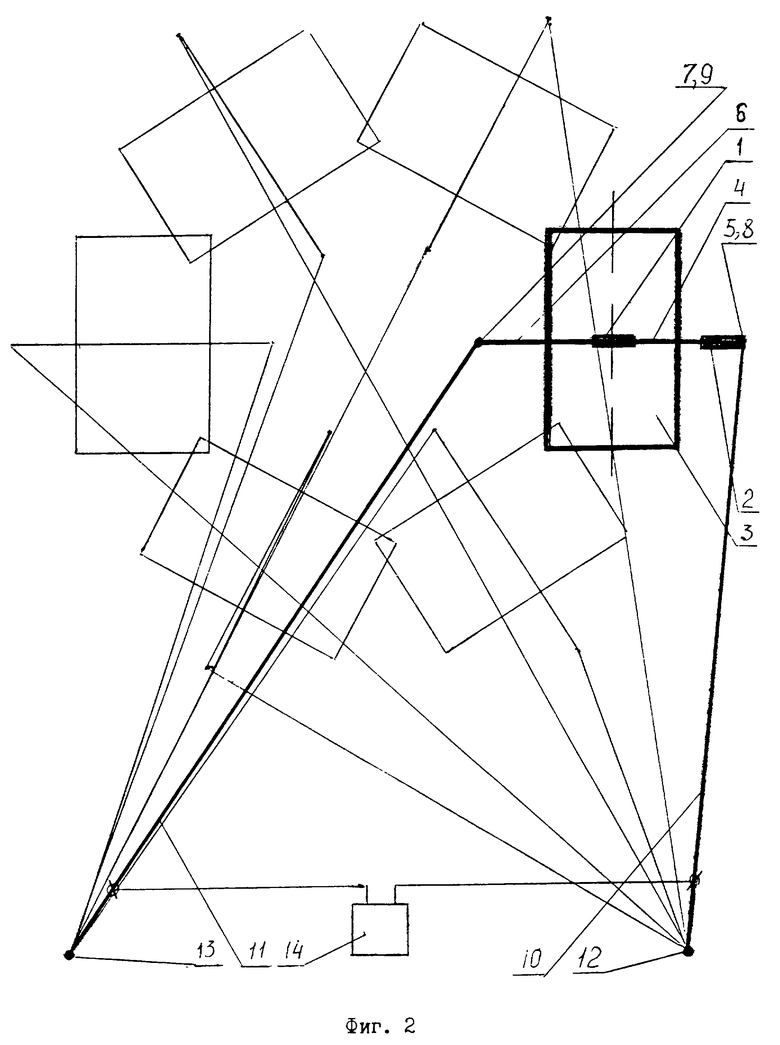
На фиг. 1 изображена принципиальная схема устройства; на фиг. 2 показаны различные положения тела на плоскости, вид сверху.
Устройство для определения положения тела на плоскости содержит две взаимно параллельные телескопические штанги 1, 2, расположенные в вертикальной поперечной плоскости тела 3, на котором закреплена нижняя штанга 1. Конец выдвижного стрежня 4 нижней штанги 1 связан вертикальной стойкой 5 с верхней штангой 2. На конце выдвижного стержня 6 верхней штанги 2 установлена вторая вертикальная стойка 7. На выдвижных стержнях 4, 6 телескопических штанг нанесены шкалы. Каждая из стоек 5, 7 связана шарнирами 8, 9 с преобразователями линейных перемещений 10, 11, которые другими концами связаны с соответствующими базовыми точками 12, 13. Базовые точки 12, 13 выполнены в виде разновысоких вертикальных стержней. Вычислительно-регистрирующий блок 14 электрически связан с преобразователями линейных перемещений 10, 11.
Определение положения тела на плоскости осуществляется следующим образом. Телескопическая штанга 1 размещается на теле 3 (фиг. 1), выдвижные стержни 4, 6 устанавливаются в необходимое положение и фиксируются. Замеряется расстояние между вертикальными осями, проходящими через вертикальные стойки 5, 7. На плоскости устанавливаются указанным образом базовые точки 12, 13, расстояние между вертикальными осями, проходящими через базовые точки, замеряется. Шарниры 8 и 9 соединены при помощи преобразователей линейных перемещений 10, 11 с базовыми точками 12, 13, расстояния между вертикальными осями, проходящими через базовые точки, и вертикальными осями, проходящими через вертикальные стойки 5, 7, также замеряются. При перемещении тела на плоскости (фиг. 2) изменяется расстояние между вертикальными осями, проходящими через базовые точки 12, 13, и вертикальными осями, проходящими через вертикальные стойки 5, 7. Данные об этих измерениях поступают в вычислительно-регистрирующий блок 14, который их обрабатывает и выдает данные о месте положения тела на плоскости. Различная высота базовых точек 12, 13, выполненных в виде вертикальных стержней, позволяет преобразователям линейных перемещений 10, 11 не вступать в физический контакт.
Технико-экономическим преимуществом предлагаемого устройства для определения положения тела на плоскости по сравнению с прототипом являются расширенные возможности измерения угловых перемещений тела, упрощение схемы устройства и более высокая его надежность.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ МЕХАНИЧЕСКОЙ ОБРАБОТКИ ВОЛОКНОСОДЕРЖАЩИХ МАТЕРИАЛОВ | 2001 |
|
RU2200781C2 |
| УСТРОЙСТВО ДЛЯ ТРЕНИРОВКИ И ОБУЧЕНИЯ НАЧИНАЮЩИХ ТЯЖЕЛОАТЛЕТОВ | 2007 |
|
RU2365397C2 |
| ОПТИЧЕСКОЕ УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ДИАМЕТРОВ КРУПНОГАБАРИТНЫХ ДЕТАЛЕЙ | 2000 |
|
RU2181190C2 |
| ТЕЛЕСКОПИЧЕСКАЯ СТРЕЛА | 1995 |
|
RU2180313C2 |
| УСТРОЙСТВО ДЛЯ МЕХАНИЧЕСКОЙ ОБРАБОТКИ ВОЛОКНОСОДЕРЖАЩИХ МАТЕРИАЛОВ | 1998 |
|
RU2144591C1 |
| УСТРОЙСТВО ДЛЯ МЕХАНИЧЕСКОЙ ОБРАБОТКИ ВОЛОКНОСОДЕРЖАЩИХ МАТЕРИАЛОВ | 2002 |
|
RU2196857C1 |
| Устройство для измерения геометрических размеров тела и его положения в пространстве | 1988 |
|
SU1548652A1 |
| ОРТОПЕДИЧЕСКОЕ УСТРОЙСТВО | 2001 |
|
RU2213544C2 |
| УСТРОЙСТВО ДЛЯ МЕХАНИЧЕСКОЙ ОБРАБОТКИ ВОЛОКНОСОДЕРЖАЩИХ МАТЕРИАЛОВ | 2002 |
|
RU2196858C1 |
| ЧЕТЫРЕХКОНТАКТНАЯ КИНЕМАТИЧЕСКАЯ ПАРА | 2004 |
|
RU2261386C1 |
Изобретение относится к машиностроению, в частности к средствам измерения линейных перемещений. Устройство содержит базовые точки, телескопические штанги, однокоординатные преобразователи линейных перемещений, концы которых связаны с базовыми точками и концами выдвижных стержней. Также устройство содержит вычислительно-регистрирующий блок, электрически связанный с преобразователями линейных перемещений. Две телескопические штанги выполнены взаимно параллельными, расположенными в вертикальной поперечной плоскости тела, на котором закреплена нижняя телескопическая штанга. Конец выдвижного стержня нижней телескопической штанги связан вертикальной стойкой с верхней телескопической штангой, на конце выдвижного стержня которой установлена вторая вертикальная стойка. Каждая стойка связана шарниром с преобразователем линейного перемещения, который другим концом связан с соответствующей базовой точкой, выполненной в виде вертикального стержня. Вертикальные стержни выполнены разновысокими. Технический результат достигается за счет расширения диапазона измерения угловых перемещений тела относительно его вертикальной оси. 1 з.п. ф-лы, 2 ил.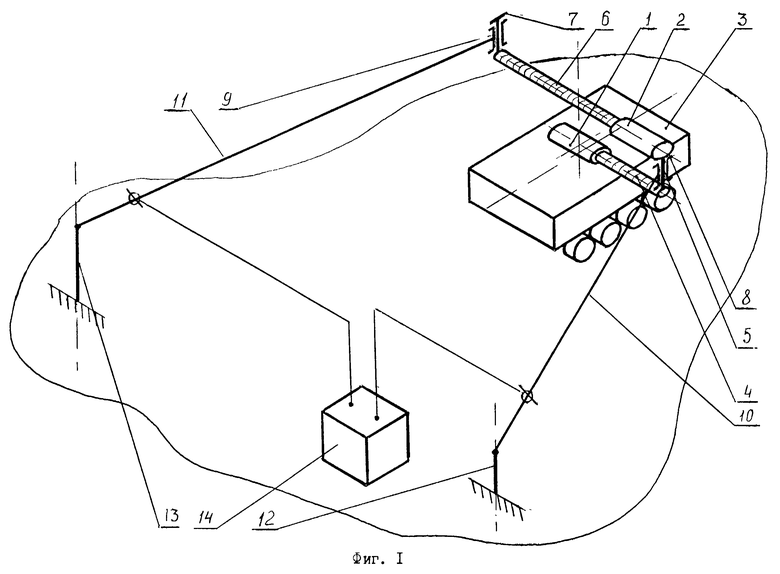
| Устройство для измерения геометрических размеров тела и его положения в пространстве | 1988 |
|
SU1548652A1 |
| КООРДИНАТНОЕ ИЗМЕРИТЕЛЬНОЕ УСТРОЙСТВО | 1990 |
|
SU1795699A1 |
| Устройство для координатного контроля поверхностей изделий | 1970 |
|
SU524067A1 |
| Устройство для определения координат точек профиля детали | 1988 |
|
SU1551960A1 |
| Способ определения хлорофиллида в растениях с повышенным содержанием органических кислот | 1983 |
|
SU1226312A1 |
