Изобретение относится к машиностроению, в частности к соединениям деталей машин.
Известно [1, с.20, 3-й и 4-й абзацы сверху], что любая механическая система (механизм, машина) состоит из звеньев и соединений звеньев, а соединение двух соприкасающихся звеньев, допускающее их относительное движение, называется кинематической парой.
Известно также, что существуют лишь две пространственные двухподвижные кинематические пары, которые согласно [1, с.31, табл. 1, поз.5 и 6] называют парами IV класса. Одна из этих пар обеспечивает два вращательных движения в двух разных плоскостях и представляет собой сферический шарнир с пальцем [1, с.31, табл.1, поз.6]. Вторая двухподвижная пара называется цилиндрической парой [1, с.31, табл. 1, поз. 5], она обеспечивает одно вращательное и одно поступательное движения относительно одной из осей координат.
В качестве прототипа настоящего изобретения принимаем двухконтактную двухподвижную кинематическую пару [2], которая обеспечивает два относительных поступательных движения звеньев (ПП): плоскости и параллелепипеда относительно двух горизонтальных осей.
Недостатком этой пары является то обстоятельство, что каждое из звеньев должно быть снабжено конусообразными выступами с различными углами конусности, а это является трудной задачей при изготовлении звеньев. Кроме того, контакт звеньев происходит по двум линиям, и могут появиться затруднения при нахождении реакций в кинематической паре при силовом исследовании механизмов.
Задачей настоящего изобретения является нахождение такого геометрического исполнения звеньев, которое может быть легко осуществлено в практике машиностроения.
Сущность изобретения заключается в том, что в четырехконтактной кинематической паре, содержащей два звена, одно звено выполнено из двух плоских пластин, жестко связанных между собой под некоторым углом в пространстве, а второе звено представляет собой твердое тело с четырьмя разновысокими стержнями, каждый из которых оканчивается шаровыми поверхностями.
Предлагаемая четырехконтактная кинематическая пара изображена на чертеже.
Она представляет собой соединение двух звеньев: звена 1 и звена 2, причем первое звено состоит из двух жестко связанных плоских пластин А и В, соединенных под произвольным углом ϕ, а второе звено имеет четыре разновысоких стержня с шарами С, D, Е и F на концах стержней. Стержни согласно изобретению имеют разную длину.
Контакт звеньев происходит по точкам соприкосновения шаровых поверхностей второго звена с плоскими поверхностями первого звена. Известно, что если стержни имеют разную длину, то только три из них могут иметь точки соприкосновения с плоскостью. Таким образом, четыре разновысоких стержня не могут иметь четыре точки касания с одной пластиной. Но если звено выполнить из двух пластин, соединенных под некоторым углом друг к другу, как это показано на чертеже, то звенья самоустановятся.
Работает пара следующим образом. При соединении звеньев они самоустанавливаются и предлагаемая пара обеспечивает лишь два независимых друг от друга поступательных движения звена, а именно перемещение вдоль оси Х и перемещение вдоль оси Y. Любой независимый поворот звена 1 относительно звена 2 вокруг вертикальной оси Z, перпендикулярной плоскости XY, приведет к нарушению контакта между звеньями, и потому невозможен. Необходимо отметить, что при перемещении звена 2 вдоль оси Y звена 1 неизбежен некоторый разворот звена 2 вокруг оси X, что обусловлено разностью в геометрических размерах стержней платформы. Однако эти развороты являются зависимыми от основного движения, а потому такая пара является двухподвижной, т.к. независимых друг от друга движений можно задать в ней два.
1. Артоболевский И.И. Теория механизмов и машин. Учебник для втузов. - 4-е изд., перераб. и доп. - М.: Наука, Гл. ред. физ-мат. лит., 1988 - 640 с.
2. Дворников Л.Т., Живаго Э.Я. Двухконтактная двухподвижная кинематическая пара. Патент РФ №2137964 от 20.09.99.
| название | год | авторы | номер документа |
|---|---|---|---|
| ТРЕХКОНТАКТНАЯ ДВУХПОДВИЖНАЯ КИНЕМАТИЧЕСКАЯ ПАРА | 2003 |
|
RU2240454C1 |
| ДВУХКОНТАКТНАЯ ДВУХПОДВИЖНАЯ КИНЕМАТИЧЕСКАЯ ПАРА | 1998 |
|
RU2137964C1 |
| ДВУХКОНТАКТНАЯ КИНЕМАТИЧЕСКАЯ ПАРА | 1996 |
|
RU2098701C1 |
| ТРЕХКОНТАКТНАЯ ДВУХПОДВИЖНАЯ КИНЕМАТИЧЕСКАЯ ПАРА | 2003 |
|
RU2241880C1 |
| ДВУХПОДВИЖНАЯ КИНЕМАТИЧЕСКАЯ ПАРА | 2013 |
|
RU2534095C1 |
| ТОРМОЗНОЕ УСТРОЙСТВО ЗАДНИХ КОЛЕС ТРЕХКОЛЕСНОГО ТРАНСПОРТА | 1998 |
|
RU2149119C1 |
| ДВУХПОДВИЖНАЯ КИНЕМАТИЧЕСКАЯ ПАРА | 2014 |
|
RU2564788C2 |
| ТРЕХПОДВИЖНАЯ КИНЕМАТИЧЕСКАЯ ПАРА | 2013 |
|
RU2578809C2 |
| УСТРОЙСТВО ПОВОРОТА ПРИЗМ В РЕКЛАМНО-ИНФОРМАЦИОННОЙ УСТАНОВКЕ | 2003 |
|
RU2262140C2 |
| ДВУХКОНТАКТНАЯ КИНЕМАТИЧЕСКАЯ ПАРА | 2005 |
|
RU2327916C2 |
Изобретение относится к области машиностроения и может быть использовано для соединения деталей машин. Пара включает два соприкасающихся звена. Первое звено выполнено из двух плоских пластин, жестко связанных между собой под некоторым углом в пространстве. Второе звено представляет собой твердое тело с четырьмя разновысокими стержнями, каждый из которых оканчивается шаровыми поверхностями. Контакт звеньев происходит по точкам соприкосновения шаровых поверхностей второго звена с плоскими поверхностями первого звена. Технический результат заключается в обеспечении четырехконтактного взаимодействия двух звеньев с возможностью осуществления двух независимых поступательных движений и одного зависимого вращательного движения. 1 ил.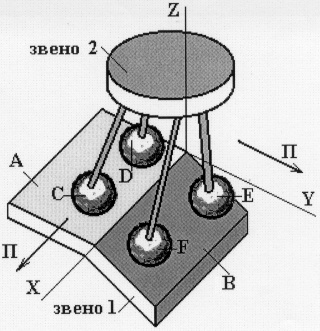
Четырехконтактная кинематическая пара, включающая два звена, отличающаяся тем, что одно звено выполнено из двух плоских пластин, жестко связанных между собой под некоторым углом в пространстве, а второе звено представляет собой твердое тело с четырьмя разновысокими стержнями, каждый из которых оканчивается шаровыми поверхностями.
| ДВУХКОНТАКТНАЯ ДВУХПОДВИЖНАЯ КИНЕМАТИЧЕСКАЯ ПАРА | 1998 |
|
RU2137964C1 |
| Артоболевский И.И | |||
| Механизмы в современной технике | |||
| - М.: Наука, 1979, т.1, с.34, рис.34. | |||

