Изобретение относится к способу и системе для определения плотности жидкости ультразвуковыми методами и более конкретно к определению плотности образца жидкости.
Во многих областях науки и техники очень важно знать зависимость объема жидкости от давления и/или температуры ("данные P-V-T"). На основании данных P-V-T составляется соответствующее уравнение состояния конденсируемого вещества, в частности, жидкостей, полностью описывающее его термодинамические характеристики.
В настоящее время известны различные методы измерения данных P-V-T. Особенно хорошие результаты дают ультразвуковые методы, которые по равнению с большинством других методов позволяют существенно повысить точность получаемых данных, поскольку скорость звука в конденсируемом веществе может быть определена с точностью порядка 10-6.
Ультразвуковые методы определения характеристик материала в принципе основаны на измерении скорости и необязательно затухания ультразвуковых волн в исследуемом при различных давлениях и температурах материале. Адиабатическая сжимаемость материала непосредственно коррелируется со скоростью звука, и поэтому данные P-V-T материала могут быть получены путем измерения скорости звуковых волн, в частности ультразвуковых волн, при различных давлениях и температурах, если известно абсолютное значение плотности исследуемого материала при заданной температуре и нормальном давлении.
Акустический импеданс Z жидкости является функцией ее плотности ρ и скорости c звука в жидкости:
Z = ρc. (1)
Акустические резонансы fn слоя исследуемой жидкости в акустической резонансной камере (кратко "жидкостные резонансы") и резонансы излучателя и приемника камеры (предполагается, что они равны) на основных частотах f0 и их гармониках накладываются друг на друга, вызывая взаимодействие самих резонансов. При этом отражение звуковых волн в ультразвуковом резонаторе на границах раздела между преобразователями и жидкостью является функцией акустического импеданса Z жидкости и акустического импеданса Z0 материала преобразователя.
Эффекты наложения частот зависят, с одной стороны, от разницы собственной частоты преобразователя и соответствующей собственной частоты жидкости, а, с другой стороны, от акустических импедансов исследуемой жидкости и материала преобразователя.
Более тщательные теоретические исследования поведения ультразвукового резонатора показали, что для преобразователя, на обратной стороне которого находится воздух, условия отражения собственных частот жидкости fn ≈ nfπ (fπ = f0/2) почти идеальны, т.е. амплитуды и фазы резонансов жидкости практически не зависят от резонансов преобразователей. Благодаря этому упрощается расчет значений скорости и поглощения звука в исследуемой жидкости на этих частотах.
Однако на резонансы жидкости, близкие к собственной частоте преобразователей, отрицательно влияют неидеальные условия отражения звуковой волны. Этой проблеме посвящено большое количество теоретических исследований. Во всех этих исследованиях влияние условий неидеального отражения на резонансы жидкости рассматривается, с одной стороны, в зависимости от акустических импедансов жидкости и материала преобразователя, а, с другой стороны, в зависимости от расстояния собственной частоты жидкости до резонансной частоты преобразователя (см., например, A. P. Sarvazyan, Т. V. Chalikian, Ultrasonics 29 (1991) 119-124). Если акустический импеданс материала преобразователя известен, то импеданс жидкости и, следовательно, ее плотность могут быть вычислены по изменениям резонансов жидкости, обусловленным неидеальными условиями отражения.
Sarvazyan и Chalikian предложили также аппаратуру для ультразвуковых измерений параметров жидкости. Эта аппаратура имеет ультразвуковую резонансную камеру с двумя электроакустическими преобразователями, образующими по крайней мере одну резонансную полость, заполненную исследуемой жидкостью. Резонансная камера помещается в сосуд, где находится жидкость под давлением, под действием которой в исследуемой жидкости и на обратных сторонах преобразователей создается избыточное давление.
Система, включающая ультразвуковую резонансную камеру и электронную схему измерения параметров конденсируемого материала, в частности жидкости, описана в WO 92/03723 (авторы Sarvazyan, Belonenko и Chalikian), которая включена в настоящую заявку в качестве ссылки. В этой системе измерений отсутствуют элементы, позволяющие выбрать конкретный резонансный максимум ультразвуковой резонансной камеры, на который синхронизирован управляемый напряжением генератор (далее УНГ). Фактически сдвиг фаз при фазовой синхронизации происходит на многих частотах, поскольку фазочастотная характеристика резонансной камеры периодически повторяется (период 2π для ее четных и нечетных гармоник собственной частоты. В известной схеме отсутствуют также устройства для многочастотного разложения конкретного резонансного максимума для определения его амплитудно-частотной характеристики.
В патенте SU-A-68437 описана возможность определения плотности жидкости по спектральному составу ее собственных частот на основе полуэмпирических зависимостей. При использовании таких зависимостей требуется измерение резонансных частот исследуемой жидкости вблизи собственной частоты преобразователя при значительном снижении добротности резонансов, т.е. при чрезмерном расширении их пиков. При этом ограничивается точность измерения резонансных частот, а полученные таким методом значения плотности не позволяют определить данные P-V-T исследуемой жидкости с необходимой высокой точностью. Очевидно, однако, что без точного определения плотности исследуемой жидкости нельзя получить достоверные данные P-V-T этой жидкости.
Задачей настоящего изобретения является, таким образом, разработка новых способа и аппаратуры для точного определения плотности жидкости ультразвуковым резонансным методом.
Другой задачей настоящего изобретения является разработка способов и аппаратуры для автоматического измерения P-V-T параметров жидкостей, в том числе абсолютного значения плотности жидкости, ультразвуковым резонансным методом.
Указанные задачи решаются с помощью предлагаемого в изобретении способа определения плотности жидкости, основанного на исследовании резонансного поведения пробы жидкости в ультразвуковой резонансной камере, имеющей излучающий ультразвук преобразователь и оппозитный ему принимающий ультразвук преобразователь и в пространстве между ними полость для пробы исследуемой жидкости, путем создания в ней ультразвуковых волн переменной частоты, включающий заполнение полости резонансной камеры эталонной жидкостью, выбор по крайней мере одной резонансной частоты fn0 ультразвуковых волн из множества таких резонансных частот в заданном частотном диапазоне, превышающей пороговую частоту flim резонансной камеры, выше которой эффектами дифракции ультразвуковых волн в камере можно пренебречь, заполнение полости резонансной камеры пробой исследуемой жидкости, создание ультразвуковых волн с выбранной резонансной частотой fn0 в этой пробе подачей сигнала ультразвуковой частоты на излучающий преобразователь. Согласно изобретению, изменяют сдвиг θ по фазе между поданным сигналом и выходным сигналом, снимаемым с принимающего преобразователя, для определения первого значения частоты fn, которому соответствует максимальное значение амплитуды ультразвуковых волн в заполненной пробой резонансной камере, и второго fn1 и третьего fn2 значений частоты, при которых величина амплитуды ультразвуковых волн меньше указанного максимального значения, определяют значение ширины полосы частот на уровне половинной мощности Δfn= fn1-fn2, по значению Δfn определяют значения потерь Lrefl, которые имеют место вблизи собственных частот преобразователей, связанных с неидеальными условиями отражения волн на поверхностях преобразователей, а затем определяют
-ln(cosθ) = π•d•fn•Lrefl/c,
где c - скорость звука в жидкости,
d - расстояние между преобразователями,
затем, зная эту величину, определяют коэффициент J по соответствующей функции зависимости коэффициента J от значений -ln(cosθ) или с помощью числовой таблицы, после чего вычисляют отношение акустических импедансов z по формуле
z = J•tg(π•fn/fo),
где f0 - основная собственная частота преобразователей, и искомое значение плотности определяют из соотношения
ρ = Zo•z/c,
где Z0 - акустический импеданс материала преобразователя.
Система для реализации способа включает управляемый напряжением генератор изменяемой частоты с управляющим входом, ультразвуковую резонансную камеру с множеством собственных частот, снабженную электроакустическим излучающим преобразователем, вход которого соединен с выходом генератора, и оппозитным ему электроакустическим принимающим преобразователем и расположенной между преобразователями полостью для пробы жидкости, схему фазовой синхронизации, которая подключена между выходом принимающего преобразователя и управляющим входом генератора, устройство реагирования на выходной сигнал принимающего преобразователя, устройство, подключенное к схеме фазовой синхронизации для управления и изменения фазы подаваемого на излучающий преобразователь сигнала относительно выходного сигнала принимающего преобразователя. Согласно изобретению в системе предусмотрены управляющее устройство, подключенное к схеме фазовой синхронизации для ввода в нее управляющего напряжения при настройке частоты генератора на любую требуемую частоту из всего множества собственных частот резонансной камеры, и вычислительный блок для вычисления плотности.
В предпочтительной форме выполнения системы ее схема фазовой синхронизации содержит фазовый компаратор, имеющий первый вход, соединенный с принимающим преобразователем, второй вход, соединенный с выходом УНГ, и выход, цепь обратной связи, соединяющую выход фазового компаратора с управляющим входом УНГ и формирующую при этом схему фазовой синхронизации, и устройство для отключения схемы фазовой синхронизации.
Устройство для отключения схемы фазовой синхронизации в свою очередь имеет устройство для размыкания цепи обратной связи.
Цепь обратной связи в одном из вариантов реализации содержит интегратор, имеющий вход, соединенный с выходом фазового компаратора, выход, соединенный с управляющим входом УНГ, и управляющий вход, соединенный с устройством для возвращения интегратора в исходное положение, на выходе которого при этом создается постоянное напряжение.
Желательно также, когда рассматриваемая система включает в себя устройство для создания первого регулируемого напряжения и устройство, которое складывает это первое регулируемое напряжение с сигналом на выходе из фазового компаратора.
Желательно также иметь в системе устройство для создания второго регулируемого напряжения и устройство, которое складывает это второе регулируемое напряжение с выходным напряжением интегратора.
Предпочтительна также система, включающая устройство измерения частоты, соединенное с выходом УНГ и содержащее генератор для создания отпирающего импульса, определяющего интервал считывания, и устройство для считывания количества колебаний напряжения, генерируемого УНГ в течение интервала считывания, при этом считывающее устройство имеет устройство для вычисления измеряемой частоты по количеству колебаний напряжения и интервалу считывания.
При этом генератор отпирающих импульсов содержит стабилизированный генератор и предварительно настраиваемый счетчик для считывания предварительно заданного количества колебаний сигнала стабилизированного генератора и генерирования во время считывания выходного импульса, определяющего интервал считывания, а также содержит синхронизирующую триггерную схему, соединенную с выходом стабилизированного генератора и запускаемую колебаниями его напряжения и имеющую выход, соединенный с запускающим входом счетчика с предварительной установкой, который начинает считывать импульсы только в течение промежутка времени, определяемого периодом колебаний сигнала стабилизированного генератора, при этом синхронизирующая триггерная схема имеет разрешающий вход, на который подается разрешающий сигнал.
Систему целесообразно оснастить устройством измерения амплитуды, соединенным с выходом принимающего преобразователя.
В одной из форм выполнения указанное устройство измерения амплитуды включает устройство ограничения амплитуды, вход которого соединен с выходом принимающего преобразователя, и умножитель, имеющий первый вход, соединенный с выходом принимающего преобразователя, и второй вход, принимающий с выхода устройства ограничения амплитуды синусоидальный сигнал, который перемножается с выходным сигналом принимающего преобразователя с получением однонаправленного перемноженного выходного сигнала, который подается в устройство обработки сигнала, включающего аналого-цифровой преобразователь и создающего характеризующий измеряемую амплитуду сигнал.
Система, кроме того, содержит устройство для избирательного соединения входа аналого-цифрового преобразователя, которым снабжено устройство обработки сигнала, с выходом интегратора и получения характеризующего фазу сигнала.
Еще в одном предпочтительном варианте реализации система имеет несколько акустических резонансных камер, выборочно включаемых в цепь обратной связи между УНГ и фазовым компаратором с помощью селекторного переключателя, содержащего два коммутатора, один из которых имеет один вход и несколько выходов, соединенных с излучающими преобразователями резонансных камер, а другой имеет такое же количество входов, соединенных с принимающими преобразователями резонансных камер, и выход, соединенный с фазовым компаратором.
Следует отметить, что выход второго коммутатора соединен с фазовым компаратором через устройство ограничения амплитуды.
Причем одна из акустических резонансных камер системы представляет собой эталонную камеру, определяющую исходное состояние системы, а по меньшей мере одна резонансная камера погружена в сосуд с жидкостью под избыточным давлением, в котором может быть размещен полупроводниковый резонатор.
Система в одном из вариантов выполнения может быть также снабжена преобразователем, импеданс которого зависит от воздействующих на него механических вибраций, механически соединенным с сосудом, чтобы измерять изменения акустического резонанса сосуда при различных уровнях возникающих в нем механических напряжений.
Указанный преобразователь может быть соединен также с импедансным мостом, определяющим изменения импеданса этого преобразователя, вызванные изменениями резонанса сосуда, а выходной сигнал импедансного моста, характеризующий резонанс сосуда, подается на схему запоминания и контроля, контролирующую состояние системы.
Согласно изобретению предложена более точная процедура определения плотностей жидких проб, основанная на анализе добротностей резонансов исследуемой жидкости. Добротности резонансов жидкости определяются в зависимости от значений ширины полосы частот на уровне половинной мощности (ШПЧПМ) Δfn, которые определяются амплитудно-частотными или фазочастотными характеристиками резонансных пиков жидкости. Даже для широких резонансов, когда определение частоты максимальной амплитуды затруднено, значение амплитуды Amax при максимальном резонансе может быть определено с высокой точностью путем усреднения и снижения шума вблизи максимального резонанса. Частоты f' и f'', при которых значение амплитуды по разные стороны от максимального резонанса составляет 0,707 Amax (или другую соответствующую величину) можно измерить с достаточной точностью, поскольку резонансная кривая при этих значениях амплитуды обладает достаточной крутизной. Поэтому точность определения значения Δfn не зависит от точности прямого измерения резонансной частоты fn. Повысить точность определения резонансной частоты можно путем арифметического усреднения значений ширины полосы частот на уровне половинной мощности при расположении резонансного пика симметрично над значениями амплитуды, равными 0,707 Amax.
Добротности резонансов жидкости являются производными значений ширины полосы частот на уровне половинной мощности (ШПЧПМ) Δfn или при других соответствующих уровнях мощности, которые определяются по амплитудно-частотным характеристикам резонансных пиков жидкости. Для определения центральной частоты и добротности резонанса можно использовать также и фазочастотные характеристики резонансов. Положение наиболее крутого участка фазочастотной характеристики соответствует центру резонанса, а угол наклона фазовой характеристики является прямой функцией добротности резонанса.
Изобретение далее поясняется описанием примеров выполнения и чертежами, где
на фиг. 1 показаны кривые зависимости от частоты составляющих потерь в ультразвуковой резонансной камере,
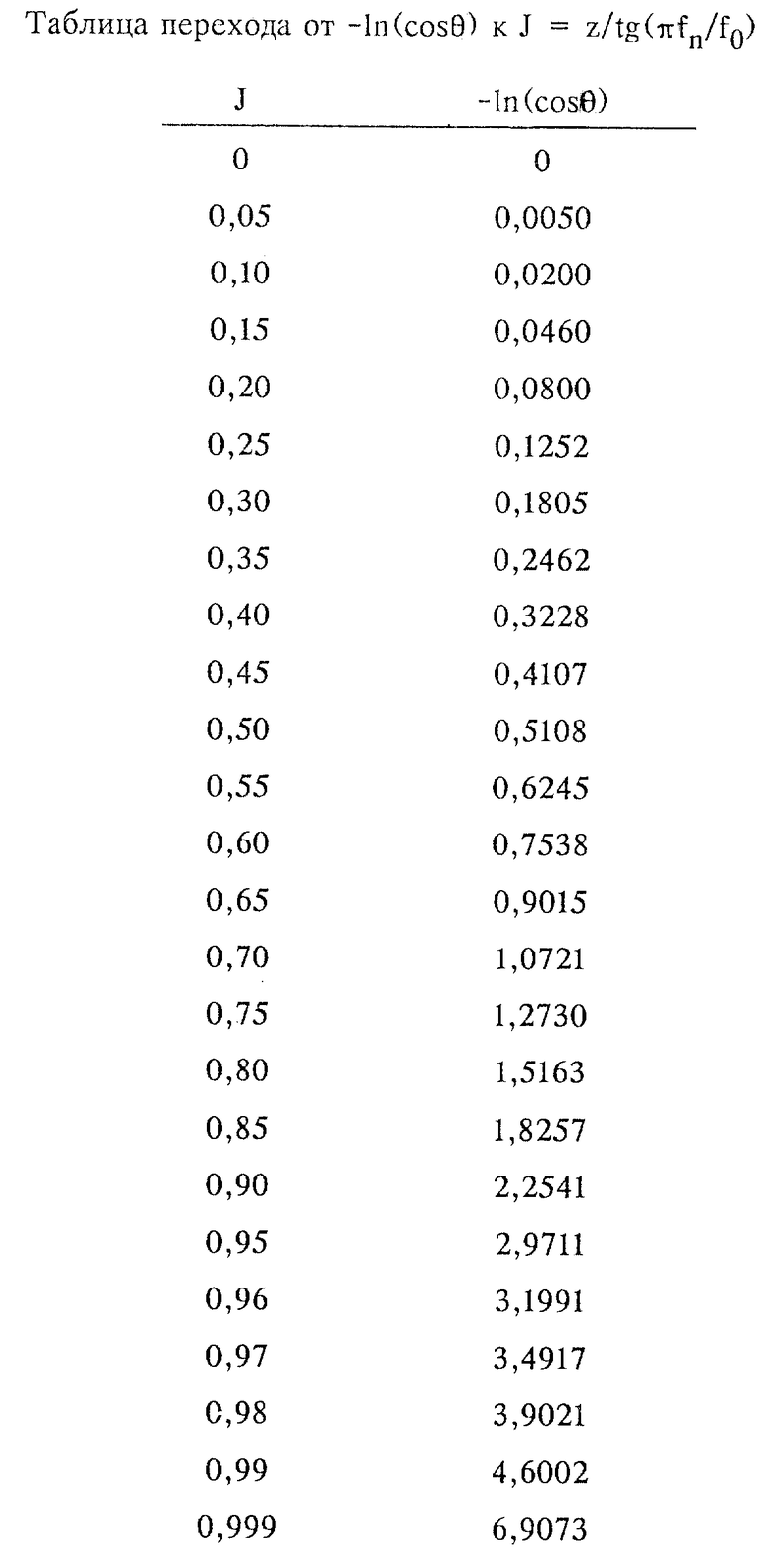
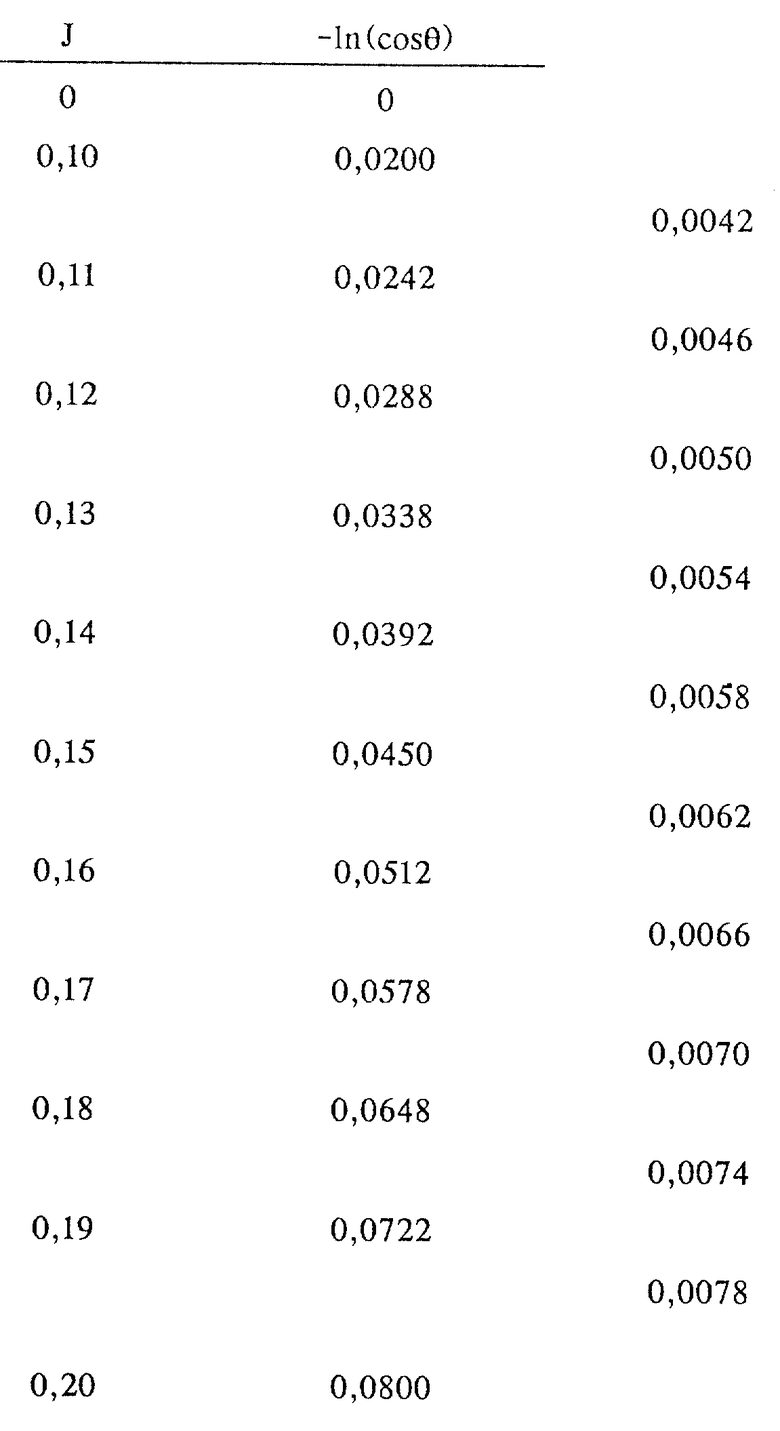
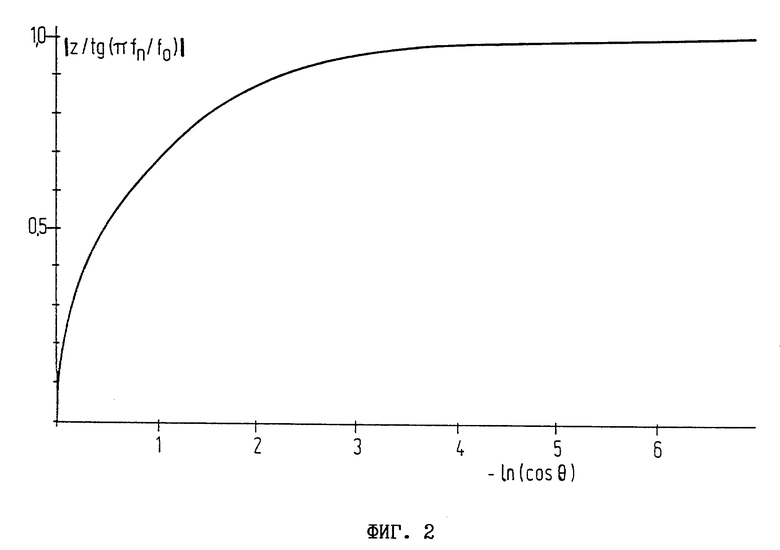
на фиг. 2 - график функции, используемой в предлагаемом способе,
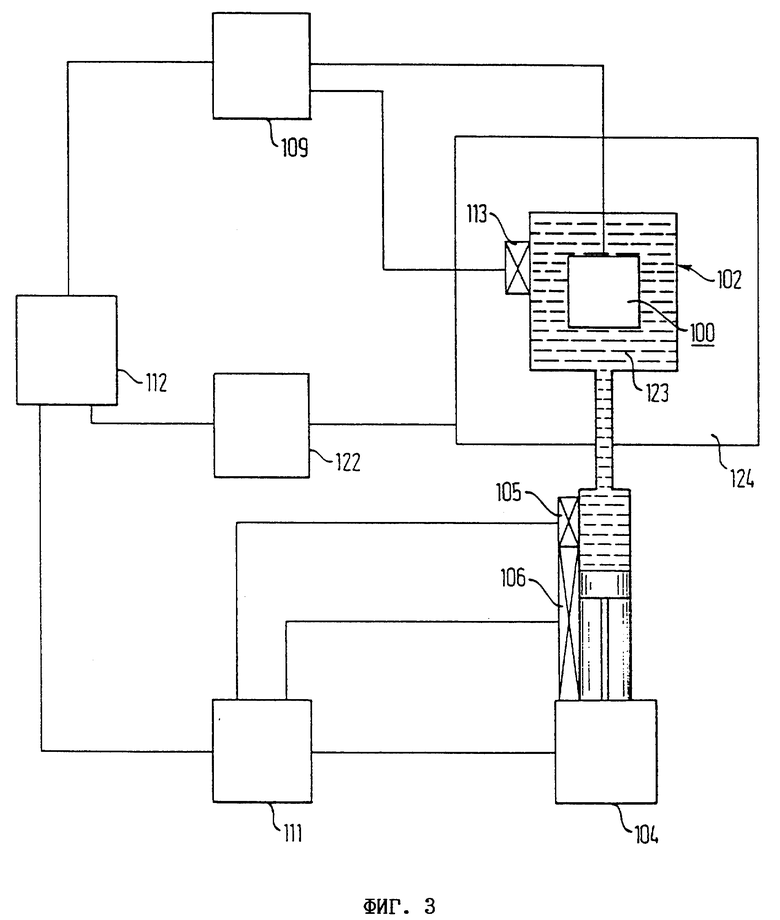
на фиг. 3 - схема, иллюстрирующая на конкретном примере предлагаемый в изобретении способ,
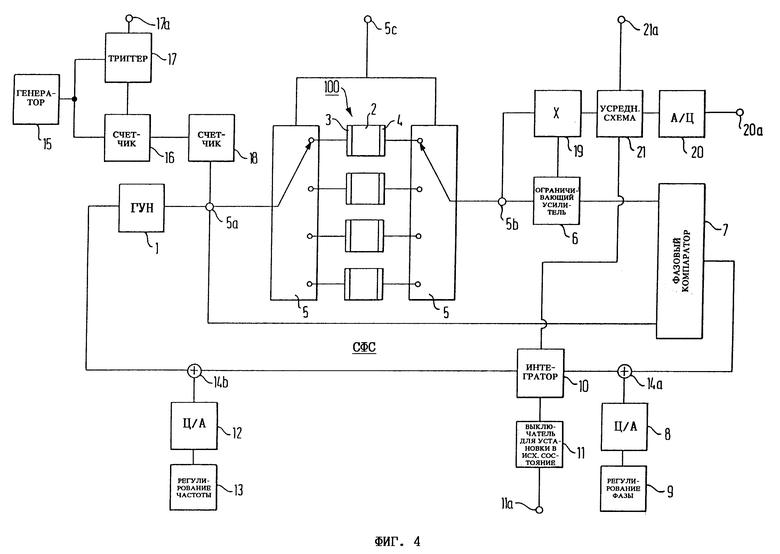
на фиг. 4 - схема, частично в разрезе и частично в виде блок-схемы, ультразвуковой измерительной системы, с помощью которой может быть осуществлено настоящее изобретение,
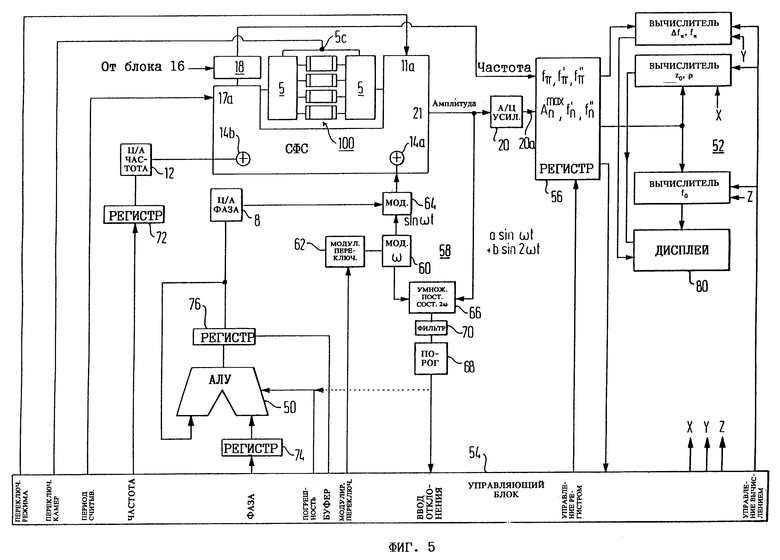
на фиг. 5 - блок-схема электронной аппаратуры, используемой в системе, показанный на фиг. 4,
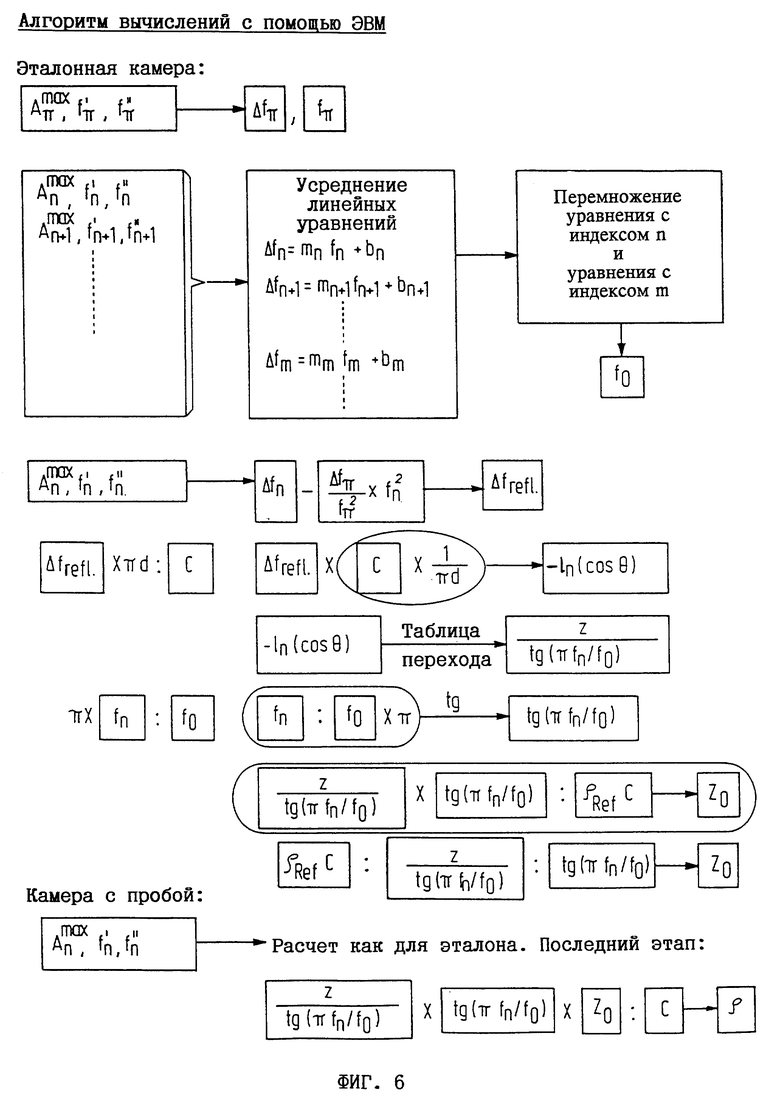
на фиг. 6 - алгоритм операций, выполняемых в соответствии с одним из вариантов предлагаемого в изобретении способа,
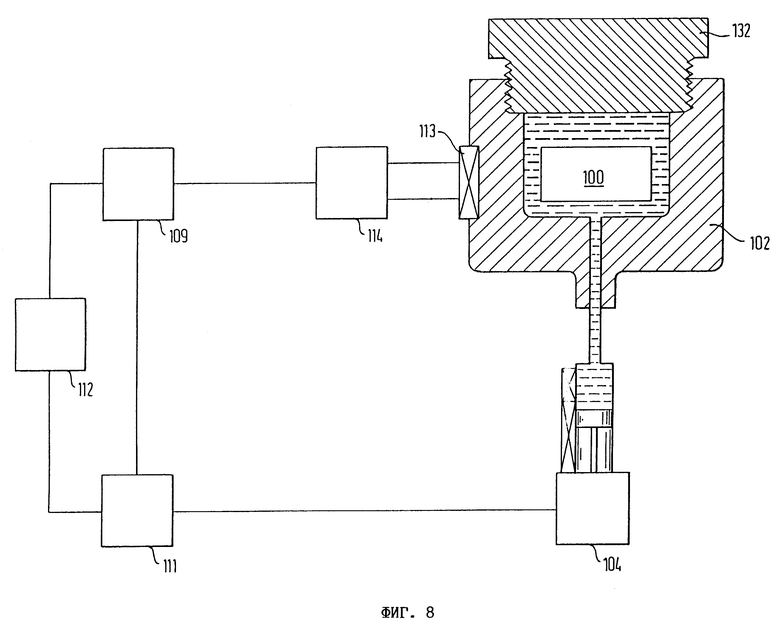
на фиг. 7-9 - другие варианты ультразвуковых измерительных систем, с помощью которых может быть осуществлено настоящее изобретение.
Ниже под термином "ультразвуковой жидкостной резонатор" понимается ультразвуковой резонатор, содержащий пару плоских круглых, имеющих форму диска электроакустических преобразователей равного диаметра, расположенных параллельно друг другу на некотором расстоянии друг от друга и образующих полость, которая заполняется пробой жидкости; такой резонатор описан, например, в находящейся на рассмотрении PCT/EP93/02113, включенной в настоящую заявку в качестве ссылки.
Ультразвуковые жидкостные резонаторы характеризуются следующими параметрами:
r0 - эффективный радиус преобразователей;
d - расстояние между преобразователями (равно длине пути ультразвуковых волн в полости);
f0 - основная собственная частота преобразователей (предполагается равной для обоих преобразователей);
fn - частота максимальной амплитуды n-го жидкостного резонанса;
Δfn - ШПЧПМ жидкостного резонанса при частоте fn;
Qn - добротность Q резонанса на частоте fn:Qn = fn/Δfn;
λ - длина ультразвуковой волны в полости.
Потери в ультразвуковом жидкостном резонаторе на резонансной частоте fn, которые можно определить как:
Ln = 1/Qn = Δfn/fn (2)
являются суммой четырех следующих составляющих потерь, которые складываются друг с другом и могут быть оценены количественно:
(I) Потери Labs, обусловленные поглощением волн в пробе жидкости. Для жидкостей, которые в исследуемом диапазоне частот не проявляют релаксации, эта составляющая потерь является линейной функцией частоты fn.
(II) Потери Ldiff связаны с дифракцией в диапазоне низких частот, когда поглощение звука мало, и поэтому расстояние, которое проходят звуковые волны в резонаторе, сравнительно велико. Кроме того, в диапазоне низких частот излучение от преобразователей существенно зависит от характеристик звукового поля, которые в свою очередь зависят от отношения r0 и λ. Эта составляющая потерь быстро падает при увеличении частоты с более сложной, чем Labs зависимостью от fn. Отличительным признаком этой зависимости является то, что Ldiff практически снижается до нуля при предельной, частоте flim, которой характеризуется каждый резонатор и которую можно вычислить, зная r0, с и коэффициент поглощения звука α пробы исследуемой жидкости, по следующей формуле:
(III) Еще одна составляющая потерь (Lgeo), которая также является линейной функцией fn, связана с ограничением звукового пучка конфигурацией полости ультразвукового резонатора.
(IV) Наконец, четвертая составляющая потерь Lrefl, которые имеют место вблизи собственных частот преобразователей, связана с неидеальными условиями отражения волн на поверхностях преобразователей. В первом приближении для расчета Lrefl можно воспользоваться следующей формулой:
(см., например, A.P. Saravazyan и др. Ultrasonics 29 (1991) 119-124).
Определение плотности жидкостей измерениями на ультразвуковом резонаторе описывается далее.
Все измерения проводятся с использованием P-V-T резонансной камеры, заполненной жидкостью, исследуемой P-V-T-методами. При исследовании камера находится в атмосферных условиях, а не погружена в создающую избыточное давление жидкость. Использование резонаторов с преобразователями, на обратной стороне которых находится воздух, позволяет получить необходимые количественные результаты с помощью более простых аналитических зависимостей и за счет этого с более высокой точностью определить значение плотности исследуемой жидкости.
Вначале вычисляется flim используемой резонансной камеры, заполненной пробой исследуемой жидкости. При этом точность, с которой определены значения α и c, не имеет особого значения, поскольку в формуле для вычисления flim они находятся под корнем третьей степени. Поэтому в этих расчетах можно использовать даже приблизительные значения α и c. Точность определения r0 является более важной, однако при этом необходимо учесть, что весь расчет flim не требует особой точности, поскольку при этом определяется только нижняя граничная частота, существенно выше которой должны проводиться все измерения.
Следующим этапом является определение Labs+Lgeo при частоте fn, которая близка к нечетной кратности частоты (fπ = f0/2), но намного выше частоты flim. Поскольку
то для всех частот резонатора эти составляющие потерь могут рассчитываться на каждой резонансной частоте.
На третьем этапе измеряются резонансы жидкости при реальных условиях отражения вблизи нечетных кратностей f0, и по полученным результатам рассчитывается плотность пробы исследуемой жидкости.
Для этого измеряются значения Δfn одного или нескольких резонансов жидкости по обе стороны от собственной частоты преобразователя. При этом целесообразно усреднять результаты измерений двух пар резонансов fn1 и fn2, которые расположены приблизительно на одном и том же расстоянии от центра собственной частоты преобразователя, т. е. nf0-fn1≈fn2-nf0. По значениям Δfn определяются соответствующие значения Lrefl и Δ frefl:
Δfrefl = Δfn-εabs+geof
Затем по уравнению (4) вычисляется -ln(cosθ).
Зная -ln(cosθ), θ можно определить различными способами. Важно отметить, что использование на этой стадии приближенных способов, от которых зависит точность измерения Δfn, может привести к снижению точности конечного значения определяемой плотности.
Предпочтительно по значению -ln(cosθ) вычислить непосредственно величину J = z/tg(πfn/f0). Сделать это можно по соответствующей функции (см. фиг. 2) или более предпочтительно с помощью числовой таблицы (см. Приложение), в которой приведены точные численные значения соответствующих величин. Эти величины связаны друг с другом гладкой функцией (см. фиг. 2), что легко позволяет линейно интерполировать их дискретные значения. При необходимости автоматизации процесса вычислений можно воспользоваться электронной таблицей числовых данных. Такой метод позволяет для узкого числового диапазона реальных значений z существенно повысить точность получаемых результатов. Акустические импедансы практически всех жидкостей (за исключением ртути) при 20oC лежат в следующих интервалах:
0,708•106 [кг/м2с] для гексана,
1,50•106 [кг/м2с] для воды,
2,42•106 [кг/м2с] для глицерина,
2,68•106 [кг/м2с] для бромоформа.
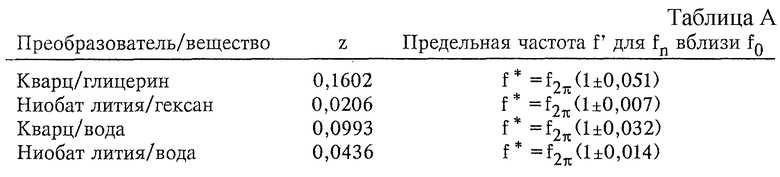
Частотный диапазон при решении уравнений (4) и (5) в первом приближении зависит от акустических импедансов преобразователей и пробы жидкости, и при использовании преобразователей из кварца (Z0 = 15,105•106 [кг/м2с]) и ниобата лития (Z0 = 34,404•106 [кг/м2с]) границы этого диапазона или предельные частоты даны в табл. A.
Указанные выше значения предельных частот f' являются теоретическими. На самом деле точность вычислений снижается в более широком диапазоне частот по обе стороны от собственной частоты преобразователя.
Из уравнений (7) и (8) легко можно определить отношение акустических импедансов z и искомое значение плотности:
Для повышения точности и достоверности результатов вычислений эффективное значение собственной частоты преобразователя следует рассчитать по значениям соответствующих пар резонансов жидкости по обе стороны от собственной частоты преобразователя. Точно так же и эффективное значение акустического импеданса преобразователей следует определять по резонансам эталонной камеры, заполненной водой. При этом можно использовать метод усреднения значений нескольких резонансов жидкости или значений соответствующих пар резонансов по обе стороны от собственной частоты преобразователя.
На фиг. 3 частично в разрезе показана блок-схема основных компонентов ультразвуковой измерительной системы, предназначенной для измерения данных P-V-T пробы жидкости. Эта система содержит акустические, резонансные камеры 100, помещенные в сосуд 102, который заполнен жидкостью 123 под давлением. Давление в жидкости 123 создается плунжерным насосом 104 высокого давления с приводом, например, от электродвигателя, для управления которым используется электронный блок 111 регулирования. Подобный насос описан в находящейся на рассмотрении PCT/EP93/01840.
Перемещение плунжера насоса относительно цилиндра насоса контролируется датчиком 106 перемещений. Давление внутри цилиндра насоса контролируется датчиком 105 силы. Выходные сигналы датчиков 105, 106 поступают на блок 111 регулирования. Принципиально система содержит также схему 109 автоматического контроля, которая измеряет электрические характеристики акустических резонаторов, как более подробно описано ниже. Некоторые из этих акустических резонаторов представляют собой жидкостные резонансные камеры, объединенные в камеру 100. Температура камеры 100 точно регулируется термостатом 124, внутри которого расположен сосуд под давлением. Управление термостатом осуществляется с помощью блока 122 регулирования. Для измерений данных P-V-T с высокой точностью необходимо учитывать увеличение объема системы, в которой создается избыточное давление. Для этого используется датчик напряжений или акустический преобразователь 113, установленный на сосуде под давлением. Соединив преобразователь со схемой 109, можно использовать его в качестве акустического резонатора.
Управление всеми указанными выше элементами системы осуществляется от блока 112 памяти и регулирования.
Показанная в качестве предпочтительного варианта изобретения на фиг. 4 система включает в себя несколько акустических резонансных камер 100, в каждой из которых имеются электроакустический излучающий преобразователь 3, полость 2 и электроакустический принимающий преобразователь 4. Резонансные камеры соединены, как показано, между селекторными переключателями 5, которые имеют управляющий вход 5c, на который подается управляющий сигнал, по которому соответствующая резонансная камера включается в цепь соответственно между входом 5a и выходом 5b. Управляемый напряжением генератор 1 имеет выход, соединенный с входом 5a, и управляющий вход. Частота генератора 1 регулируется соединенной с его управляющим входом электронной цепью обратной связи и при этом выходной сигнал, вырабатываемый принимающим преобразователем 4 выбранной камеры, имеет строго заданное смещение по фазе относительно напряжения возбуждения, подаваемого от генератора 1 на излучающий преобразователь 3 этой камеры. Цепь обратной связи является частью схемы фазовой синхронизации, которая синхронизирует генератор 1 на частоту, определяемую собственной частотой резонансной камеры и сдвигом фазы между сигналом возбуждения и выходным сигналом выбранной акустической камеры 100. Этот сдвиг фаз можно задать с помощью отдельного внешнего устройства, как более подробно описано ниже. Сигнал на выходе генератора используется также как опорный фазовый сигнал для схемы 7 генерирования импульсов, которая работает как фазовый компаратор. Для инверсии опорного фазового сигнала можно использовать отдельную схему регулирования.
Схема фазовой синхронизации СФС, включающая цепь обратной связи, содержит следующие элементы.
а) Управляемый напряжением генератор 1, который выполнен по типу генератора, выходная частота которого является монотонной функцией от подаваемого на его вход входного управляющего напряжения. Амплитуда выходного напряжения УНГ не должна зависеть от его частоты.
б) Двухсекционный селекторный переключатель 5 с входной и выходной секциями, каждая из которых работает как однополюсный выключатель на несколько положений, который включает в схему СФС выбранную камеру 100.
в) Ограничивающий усилитель 6, который принимает сигнал с выхода выбранной камеры 100 и преобразует его в квадратную волну, имеющую знак или полярность принимаемого сигнала с сохранением его фазы.
г) Фазовый компаратор 7, который представляет собой высокоимпедансный источник тока, создающий однонаправленные импульсы постоянной амплитуды, длительность которых пропорциональна разнице фаз между выходным сигналом задающего генератора 1 и выходным сигналом усилителя 6.
д) Суммирующая схема 14a, на первый вход которой поступает выходной сигнал фазового компаратора 7, а на второй поступает выходной сигнал цифроаналогового (Ц/А) преобразователя 8 и которая вырабатывает первое регулируемое напряжение, которое используется как напряжение регулирования фазы. На преобразователь 8 от схемы управления 9, в качестве которой можно использовать персональный компьютер (ПК) или другое устройство управления, поступает цифровой сигнал регулирования фазы.
е) Схема 10 интегрирования, вход которой соединен с выходом суммирующей схемы 14a, а выходное напряжение пропорционально временному интегралу суммы вырабатываемых фазовым компаратором 7 импульсов тока, характеризующих фазовый сдвиг, и смещенного по фазе на 180o тока, пропорционального регулируемому напряжению регулирования фазы. Схема 10 интегрирования управляется внешним выключателем 11, который имеет управляющий вход 11a и который при возбуждении восстанавливает до исходного состояния уровень выходного напряжения интегратора, например, заземляя его. При этом цепь обратной связи между фазовым детектором 7 и УНГ 1 разрывается, и схема СФС перестает работать.
з) Вторая суммирующая схема 14b, первый вход которой соединен с выходом интегрирующей схемы 10, а второй соединен еще с одним цифроаналоговым преобразователем 12 и которая вырабатывает второе регулируемое напряжение (напряжение регулирования частоты). На преобразователь 12 от схемы управления, в качестве которой можно использовать ПК или другое устройство управления, поступает цифровой сигнал регулирования частоты. Выход схемы 14b суммирования соединен с управляющим входом УНГ и замыкает тем самым всю схему фазовой синхронизации.
В показанной на фиг. 4 схеме имеется схема измерения частоты выходного сигнала генератора и амплитуды сигнала на выходе из камеры.
Схема измерения частоты генератора содержит таймер с кварцевым генератором 15, вырабатывающим тактовые импульсы, счетчик 16 с предварительной установкой, задающий временной интервал считывания тактового импульса, начиная от заданного числа до нуля, и триггерную схему 17, синхронизирующую внешний запускающий сигнал, подаваемый на вход 17a, с тактовыми импульсами таким образом, что начало и окончание временного интервала, определяемого таймером, совпадает с тактовыми импульсами. Таймер контролирует период считывания счетчика 18, на который поступает выходной сигнал УНГ 1.
Схема генерирования сигнала, характеризующего амплитуду сигнала на выходе камеры 100, содержит умножитель 19, в котором поступающий на него с выхода 5b сигнал умножается на свою собственную величину, т.е. на соответствующий сигнал такой же полярности, вырабатываемый ограничивающим усилителем 6, и полученный сигнал усредняется в схеме усреднения, на управляющий вход 21a которой поступает постоянный по времени сигнал управления, а затем обрабатывается в блоке 20, который представляет собой аналого-цифровой преобразователь, выход 20a которого соединен с цифровым дисплеем или ПК.
Как указано выше, переключатель 11 вместе с интегратором 10 образуют устройство, разрывающее с помощью внешнего устройства управления цепь обратной связи при отсоединении интегратора 10 от сумматора 14b, при этом система будет работать как обычный анализатор, в котором частота генератора регулируется только выходным сигналом схемы 12. В этом случае интегрирующая схема 10 работает как усилитель с низкочастотным пропусканием, единственный вход которого соединен с фазовым детектором 7 и который на выходе вырабатывает сигнал, характеризующий фазу сигнала на выходе из резонансной камеры. Именно этот сигнал, а не сигнал на выходе из схемы 19, можно подать на А/Ц-преобразователь блока 20, пропустив его через имеющий внешнее управление аналоговый умножитель 21. Для работы системы в таком режиме в элементах 10, 8 и 20 необходимо предусмотреть соответствующие коммутаторы каналов.
Первым режимом работы, показанной на фиг. 4 схемы, является режим анализатора. В этом режиме частота УНГ 1 ступенчато повышается в заданном диапазоне частот путем ступенчатого изменения входного напряжения, вырабатываемого регулирующим частоту Ц/А-преобразователем блока 13. На каждой ступени частота измеряется с помощью счетчика 18 считыванием в течение периода времени, заданного таймером 15, 16 и 17, количества вырабатываемых генератором 1 колебаний его выходного сигнала. Время считывания определяется величиной управляющего напряжения, подаваемого на вход 17a. Период считывания должен обеспечить необходимую точность измерений, и на практике он составляет обычно от 10 до 100 миллисекунд для мегагерцевого диапазона частот УНГ. Кроме того, временной интервал должен быть достаточно длинным, с тем чтобы в течение этого времени можно было успеть провести несколько измерений амплитуды и фазы сигнала, снимаемого на этой частоте с выбранной резонансной камеры 100. Для повышения точности результаты этих измерений можно усреднить. В результате в определенном частотном диапазоне получают фазочастотную и амплитудно-частотную характеристики выбранной камеры с несколькими резонансными частотами. Полученная информация используется для определения регулирующего частоту напряжения Ц/А-преобразователя блока 13 при выборе в этом диапазоне частот требуемого резонанса.
Второй режим работы, который начинается обычно после настройки регулирующего частоту Ц/А-преобразователя на конкретный выбранный резонанс, и настройки регулирующего фазу Ц/А-преобразователя блока 9 на определенное значение, лежащее в пределах диапазона синхронизации фазового компаратора 7, представляет собой работу в режиме ШПЧПМ, в который система переходит после замыкания цепи обратной связи, т.е. после возбуждения интегратора 10 путем подачи на его вход 11a сигнала соответствующего уровня. При работе в этом режиме ступенчато изменяется входное напряжение регулирующего фазу Ц/А- преобразователя. Для каждой ступени определяется частота генератора 1. В течение каждого интервала считывания частоты проводятся многократные измерения амплитуды и других параметров, например, температуры и давления пробы, которые регистрируются и усредняются.
Систему можно переключить на другую резонансную частоту выбранной камеры временным замыканием управляемого от внешнего устройства выключателя 11 на непродолжительное время (с размыканием цепи обратной связи) и изменением на это время задающего частоту напряжения. Длительность такого отключения должна быть достаточно большой с тем, чтобы УНГ стабилизировался на новую частоту. Изменение регулирующего частоту напряжения при открытом выключателе 11 и работающем в цепи обратной связи интеграторе 10 не изменяет рабочей частоты УНГ, поскольку обратная связь компенсирует любые изменения напряжения на выходе схемы 12 путем соответствующего изменения в противофазе выходного напряжения интегратора 10.
Система, показанная на фиг. 5, представляет собой предпочтительный вариант выполнения изобретения и содержит описанную выше и показанную на фиг. 4 схему. При этом одни и те же элементы, показанные на фиг. 4 и 5, имеют одинаковые обозначения.
Система, показанная на фиг. 5, содержит аналогичную рассмотренной выше и показанной на фиг. 4 схему фазовой синхронизации СФС. Основными дополнительными элементами системы, показанной на фиг. 5, являются арифметико-логическое устройство АЛУ 50, вычислительное устройство 52 и управляющий блок 54, в качестве которого можно использовать микропроцессор.
В показанной на фиг. 5 системе имеется также регистр 56 для хранения информации о значениях частоты и амплитуды, которая обрабатывается в вычислительном устройстве 52, и модулятор 58, который модулирует аналоговое регулирующее фазу напряжение, вырабатываемое Ц/А-преобразователем 8, синусоидальным модулирующим сигналом. Схема модуляции включает источник 60 модулирующего напряжения, вырабатывающий синусоидальный модулирующий сигнал, частота которого меньше частоты ультразвуковых волн; модулирующий переключатель 62, который включает и выключает генератор 60 модулирующего сигнала; и модулятор 64, на который подается регулирующее фазу напряжение от Ц/А-преобразователя 8 и выходной сигнал генератора 60 и который подает на вход в сумматор 14a модулированный сигнал регулирования фазы.
Модулирующий сигнал подается также на первый вход умножителя 66, на второй вход которого с выхода усредняющей схемы 21 подается сигнал, характеризующий амплитуду.
Выход умножителя 66 соединен через низкочастотный фильтр 70 со схемой, генерирующей сигнал ошибки или отклонения. Этот сигнал подается на соответствующий вход управляющего блока 54. Сигнал отклонения равен нулю, когда отфильтрованный выходной сигнал умножителя 66 лежит в заранее заданном интервале между положительной и отрицательной пороговыми величинами, которые равны друг другу и близки к нулю, или же он равен некоторой положительной величине (разности), когда выходной сигнал превышает положительный пороговый уровень, или некоторой отрицательной величине (разности), когда выходной сигнал становится меньше отрицательного порогового уровня. Первый буферный регистр 72 соединен с регулирующим частоту выходом управляющего блока 54 и входом Ц/А-преобразователя 12. Второй буферный регистр 74 соединен с регулирующим фазу выходом управляющего блока 54 и соответствующим входом АЛУ 50, а третий буферный регистр 76 соединен с выходом АЛУ и входом Ц/А-преобразователя 8. Выход регистра 76 соединен обратной связью со входом АЛУ.
При определении плотности или других P-V-Т-параметров жидкости с помощью показанной на фиг. 5 системы одна из камер 100 заполняется пробой исследуемой жидкости, а другая камера заполняется эталонной жидкостью, например, водой. Остальные камеры можно заполнить другими исследуемыми жидкостями. Предполагается, что все камеры 100 показанной на фиг. 5 системы имеют одинаковые характеристики.
Вначале определяется, как указано выше, предельная частота flim камеры 100, после чего в регистре частоты (не показан) управляющего блока 54 задается (существенно выше частоты flim) диапазон частот, внутри которого будут производиться ультразвуковые измерения.
Цикл измерений начинается с того, что управляющий блок 54 после подачи соответствующего сигнала управления на вход 5c включает в систему эталонную камеру. СФС при подаче соответствующего сигнала на вход 11a начинает работать в режиме анализатора. При подаче соответствующего сигнала регулирования частоты к Ц/А- преобразователю 12 частота УНГ 1 (фиг. 4) проходит через весь заданный заранее диапазон частот, превышающих flim. Изменение частоты происходит при ступенчатом бесконечно малом увеличении буферного цифрового сигнала, поступающего на вход в Ц/А- преобразователь 12. Резонансы ультразвуковых волн, которые имеют место в эталонной камере при изменении частоты в заданном диапазоне, определяются описанным выше способом и информация о них хранится в регистре 56.
После этого система переключается на работу в режиме СФС, для этого замыкается цепь обратной связи СФС и путем подачи на вход Ц/А- преобразователя 12 соответствующего сигнала генератор настраивается на первую собственную частоту жидкости. При работе в этом режиме механизмом цифровой обратной связи определяется максимальная амплитуда резонансного пика. Регулирующее фазу напряжение на входе 14a СФС модулируется синусоидальным сигналом модулятора 60 с частотой модуляции ω. Тогда сигнал на выходе из резонансной камеры будет иметь вид
Uout = a sin ωt+b sin 2ωt.
После перемножения Uout с модулирующим сигналом в умножителе 66 получается сигнал, содержащий постоянную составляющую и переменную составляющую с частотой 2ω. После фильтрации и отделения переменной составляющей постоянная составляющая анализируется детектором 68 нулевого напряжения. В том случае, когда абсолютное значение постоянной составляющей будет меньше заранее заданного близкого к нулю порогового значения, цифровой сигнал на выходе детектора 68 будет равен нулю. Если положительная постоянная составляющая сигнала превысит пороговое значение, то на выходе детектора 68 появится положительный разностный сигнал, а при превышении отрицательной постоянной составляющей сигнала порогового значения на выходе детектора 68 появится отрицательный разностный сигнал.
При таком режиме работы АЛУ блок 50, который имеет буферные вход и выход, сдвигает цифровой обратной связью фазовое число на фазовое число резонансного максимума и поддерживает его на этом уровне, обеспечивая возможность точного считывания частоты и измерения амплитуды на резонансном максимуме.
Информация о максимальной амплитуде, фазе и частоте на максимуме хранится в регистре 56 вычислительного устройства.
При работе системы в режиме СФС боковые частоты f' и f'' при заданных уровнях амплитуды или фазы, расположенные слева и справа от резонансного максимума, измеряются при изменении значений фазы сигналов, поступающих к фазовому Ц/А- преобразователю 8 от АЛУ 50 через регистр 76. Таким способом получают данные о последующих резонансных пиках, которые поступают в регистр 56.
После этого переключателем 5 в систему измерений включается соответствующая камера с пробой и описанная выше процедура последовательно повторяется для всех камер.
Под управлением блока 54 вычислительный блок 52 по алгоритму, показанному на фиг. 6, рассчитывает акустический импеданс Z и соответственно плотность ρ исследуемой жидкости Δfπ и fπ представляют собой соответственно ШПЧПМ и собственную частоту вблизи нечетных кратностей f0/2.
На фиг. 7 схематично показан еще один вариант выполнения изобретения. Сосуд 102 под давлением герметично закрыт крышкой 132, имеющей, например, не пропускающую жидкость резьбу, и заполнен жидкостью 123, давление в которой создается насосом 104. В сосуде расположены по крайней мере две акустические резонансные камеры 100a и 100b, одна из которых используется в качестве эталонной для получения базовых характеристик, а другая (ие) заполняется (ются) пробой (ами) жидкости, исследуемой сравнительным относительно эталона методом. Внутри сосуда 102 установлен полупроводниковый чувствительный к давлению резонатор 108, позволяющий быстро определить начальные условия эксперимента в жидкости 123. Этот резонатор можно использовать для быстрой и более грубой предварительной настройки системы на требуемое резонансное состояние с последующим проведением более точных измерений при переключении системы на резонансную камеру 100. При необходимости внутрь сосуда 102 можно, разумеется, поместить более двух резонансных камер в том случае, если сосуд 102 имеет достаточно большой для этого объем. При использовании одной из резонансных камер в качестве эталонной остальные камеры можно использовать для соответствующих измерений. При необходимости проведения измерений во всех камерах, когда точность измерений не должна быть очень высокой, можно при проведении сравнительных резонансных измерений использовать резонатор 108.
Выходные сигналы от всех помещенных внутрь сосуда 102 камер выводятся с применением соответствующих уплотнений через крышку 132 и поступают в схему 109, которая преобразует поступающие в нее сигналы в сигналы другой формы, которые подаются в предназначенную для их запоминания и обработки схему 112. Схема 112 генерирует команды, необходимые для управления схемой 111 управления насоса, которая в свою очередь обеспечивает прецизионное регулирование насоса 104.
Еще один вариант изобретения показан на фиг. 8. В этом варианте используется акустический преобразователь 113, который установлен на сосуде 102 и предназначен для измерения акустических резонансных частот сосуда при различных условиях. Изменения формы или геометрии сосуда, связанные с изменениями создаваемого в нем давления, сопровождаются изменениями собственной частоты сосуда, и определенная один раз зависимость собственной частоты сосуда от его формы позволяет точно контролировать механические эффекты, которые могут отрицательно сказаться на точности проводимых измерений.
Используя эти зависимости, можно создавать внутри сосуда требуемое давление путем подачи выходного сигнала преобразователя 113 в схему управления насоса 104. Выходной импеданс преобразователя 113 зависит от испытываемых им механических вибраций. Соединив преобразователь 113 с импедансным мостом 114, можно полностью компенсировать изменения импеданса преобразователя, обусловленные изменениями собственной частоты сосуда 102. Сигнал на выходе их моста 114, характеризующий фактический импеданс преобразователя 113, подается в схему 109, в которой он преобразуется в сигналы, которые можно использовать в схеме 112 запоминания и обработки и в схеме 111 управления насоса. Последующее регулирование насоса 104 сопровождается изменением давления внутри сосуда 102 до заданной величины. При этом по сравнению с вариантом использования резонатора 108 по фиг. 7 необходимое давление внутри сосуда 102 создается быстрее и с большей точностью.
Вариант, показанный на фиг. 8, обладает тем преимуществом, что он позволяет контролировать процесс старения сосуда путем контроля изменений его собственной частоты при отсутствии в нем давления. В течение всего срока службы сосуда его собственная частота изменяется, и степень такого изменения в промежутках между измерениями позволяет судить о степени старения сосуда и принимать решения о возможности или невозможности его дальнейшего использования для проведения высокоточных измерений.
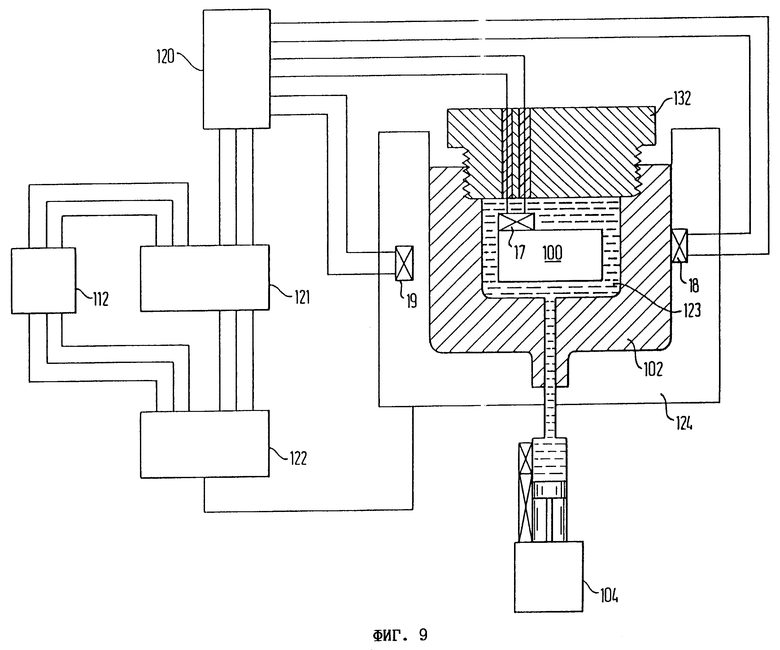
В показанном на фиг. 9 варианте выполнения изобретения предусмотрена возможность очень точного контроля температуры путем использования нескольких датчиков 17, 18 и 19 температуры с высокой разрешающей способностью, которые установлены в различных местах камеры 100, сосуда 102 под давлением и термостата 124. Выходные сигналы от этих датчиков поступают на блок 120, который преобразует их в соответствующие электрические сигналы, используемые в качестве сигналов, подаваемых в схему 121 обработки, в которой имеются высоко стабильные и точные дифференциальные усилители.
Отклонения от эталонных сигналов, поступающих из схемы 112 запоминания и контроля, используются для выработки сигналов регулирования, поступающих в схему 122 регулирования, которая в свою очередь вырабатывает управляющие сигналы, по которым осуществляется управление соответствующими нагревательными или охлаждающими устройствами термостата 124. Применение группы установленных в различных местах датчиков температуры позволяет на ранней стадии зафиксировать изменения температуры и с помощью системы регулирования с высокой точностью поддерживать на заданном уровне температурные условия эксперимента.
Предпочтительным диапазоном частот ультразвуковых волн является диапазон от примерно 105 Гц до нескольких 107 Гц.
Примеры определения плотностей
4-х канальная резонансная камера:
преобразователи из ниобата лития.
r0 = 2,5 мм, d = 7,0 мм, fp = 10,0 МГц
Измерения на эталонной камере, заполненной водой
t = 25,0 [oC]
ρ = 997 [кг/м2с]
c = 1497 [м/с]; V.A. DelGrosso and C.M. Mader, J. Acoust. Soc. Amer. 52 (1972) 1442-1446.
(aw/f2) = 22•10-15 [с2/м]; T. Funck und F. Eggers, Fortschritte der Akustik - DAGA'85 (1985) 651-654.
(Первый этап: расчет flim для эталонной камеры:
flim = [c/r02(aw/f2)]1/3 = [1497/(2,5•10-3)2•22•10-15]1/3 = 22,16 [МГц]
Второй этап: измерение при fn = nfπ
расчет εabs+geo:
fn = 25,110 [МГц]
Δfn = Δfabs+geo = 6776 [Гц]
εabs+geo 10,747•10-12 [с]
Третий этап: измерение Δfn при fn=28,934 [МГц]
Δfn = 11125 [Гц]; f0 = 9,999 [МГц]
Δfabs+geo = 10,747•10-12 [с]•(28,934•106 [Гц])2 = 8997 [Гц]
Δfrefl = Δfn-Δfabs+geo = 11125 - 8997 = 2128 [Гц]
-ln(cosθ) = Δfrefl•π•7,0•10-3 [м]/1497 [м/с] = 0,031261
-ln(cosθ) = 0,031261--->z/tg π fn/f0) = 0,1249
tg(πfn/f0) = tg(π • 28,934/9,999) = -0,34698
z = 0,1249•0,34699 = 0,04334
Z0 = ρ•c/z = 997•1497/0,04334 = 34,437•106 [кг/м2с]
Измерение на камере 1 для пробы, заполненной 0,100M NaCl
Δfn при fn = 29,057 [МГц]:
fn = 29,057 [МГц]; Δfn = 11897 [Гц]; f0 = 9,999 [МГц]
Δfabs+geo = 10,747•10-12 [с]•(29,057•106 [Гц])2 = 9074 [Гц]
Δfrefl = Δfn-Δfabs+geo = 11897 - 9074 = 2823 [Гц]
-ln(cosθ) = Δfrefl•π• 7,0•10-3 [м]/1503,4 [м/с] = 0,04129
-ln(cosθ) = 0,04129--->z/tg π fn/f0) = 0,1436
tg(πfn/f0) = tg(π • 29,057/9,999) = -0,30424
z = 0,1436•0,30424 = 0,043700
ρ = Z0•z/c = 34,437•106•0,043700/1503,4 = 1001 [кг/м3]
ρ, измеренная денситометром, составила 1001 [кг/м3]
Измерение на камере 2 для пробы, заполненной 0,050М NaCl
Δfn при fn = 28,996 [МГц]:
fn = 28,996 [МГц]; Δfn = 11481 [Гц]; f0 = 9,999 [МГц]
Δfabs+geo = 10,747•10-12 [с]•(28,996•106 [Гц])2 = 9036 [Гц]
Δfrefl = Δfn-Δfabs+geo = 11481 - 9036 = 2445 [Гц]
-ln(cosθ) = Δfrefl•π •7,0•10-3 [м]/1500,2 [м/с] = 0,03584
-ln(cosθ) = 0,03584 → z/tg(πfn/f0) = 0,13378
tg(πfn/f0) = tg(π •28,996/9,999) = -0,32530
z = 0,13378•0,32530 = 0,04352
ρ = Z0•z/с = 34,437•106•0,043520/1500,2 = 999 [кг/м3]
ρ, измеренная денситометром, составила 999 [кг/м3]
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ ФИЗИЧЕСКИХ ПАРАМЕТРОВ СОСТОЯНИЯ СРЕДЫ | 1991 |
|
RU2029265C1 |
| СПОСОБ ИЗМЕРЕНИЯ КОЭФФИЦИЕНТА ЗАТУХАНИЯ АКУСТИЧЕСКИХ ВОЛН В РЕЗОНАТОРНОЙ СТРУКТУРЕ И ЕЕ ДОБРОТНОСТИ | 2010 |
|
RU2477493C2 |
| Ультразвуковой интерферометр | 1979 |
|
SU838549A1 |
| СПОСОБ УПРАВЛЕНИЯ ПРОЦЕССОМ УЛЬТРАЗВУКОВОЙ ЛИПОСАКЦИИ | 2003 |
|
RU2247544C1 |
| СПОСОБ ИЗМЕРЕНИЯ АКУСТИЧЕСКОГО ИМПЕДАНСА СРЕДЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2017 |
|
RU2672774C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ СКОРОСТИ И ПОГЛОЩЕНИЯ УЛЬТРАЗВУКА | 2004 |
|
RU2279068C2 |
| Устройство для проведения хирургических операций с применением ультразвуковых колебаний | 2021 |
|
RU2774586C1 |
| Цифровой ультразвуковой интерферометр | 1977 |
|
SU684437A2 |
| Устройство для дифференциального измерения скорости распространения ультразвука | 1985 |
|
SU1272214A1 |
| СПОСОБ ИЗМЕРЕНИЯ ЭЛЕКТРИЧЕСКИХ ПАРАМЕТРОВ ПЬЕЗОЭЛЕКТРИЧЕСКИХ ПРЕОБРАЗОВАТЕЛЕЙ | 2023 |
|
RU2829570C1 |

Изобретение относится к способам и системам для определения плотности жидкости ультразвуковыми методами, а именно к определению плотности образца жидкости. Техническим результатом предлагаемого изобретения является увеличение точности определения плотности жидкости, а также автоматическое измерение абсолютного значения плотности жидкости ультразвуковым резонансным методом. Это достигается при помощи системы для определения плотности жидкости, включающей управляемый напряжением генератор изменяемой частоты с управляющим входом, ультразвуковую резонансную камеру, снабженную электроакустическим излучающим преобразователем, вход которого соединен с выходом генератора и оппозитным ему электроакустическим принимающим преобразователем, а также расположенной между преобразователями полостью для пробы жидкости. Кроме того система содержит схему фазовой синхронизации, которая подключена между выходом принимающего преобразователя и управляющим входом генератора, устройство реагирования на выходной сигнал принимающего преобразователя, устройство, подключенное к схеме фазовой синхронизации для управления и изменения фазы подаваемого на излучающий преобразователь сигнала относительно выходного сигнала принимающего преобразователя. В системе предусмотрены управляющее устройство, подключенное к схеме фазовой синхронизации для ввода в нее управляющего напряжения при настройке частоты генератора на любую требуемую частоту из всего множества собственных частот резонансной камеры, и вычислительный блок для вычисления плотности. Способ определения плотности жидкости основан на исследовании резонансного поведения пробы жидкости в ультразвуковой резонансной камере. 2 с. и 17 з.п.ф-лы, 9 ил., 2 табл.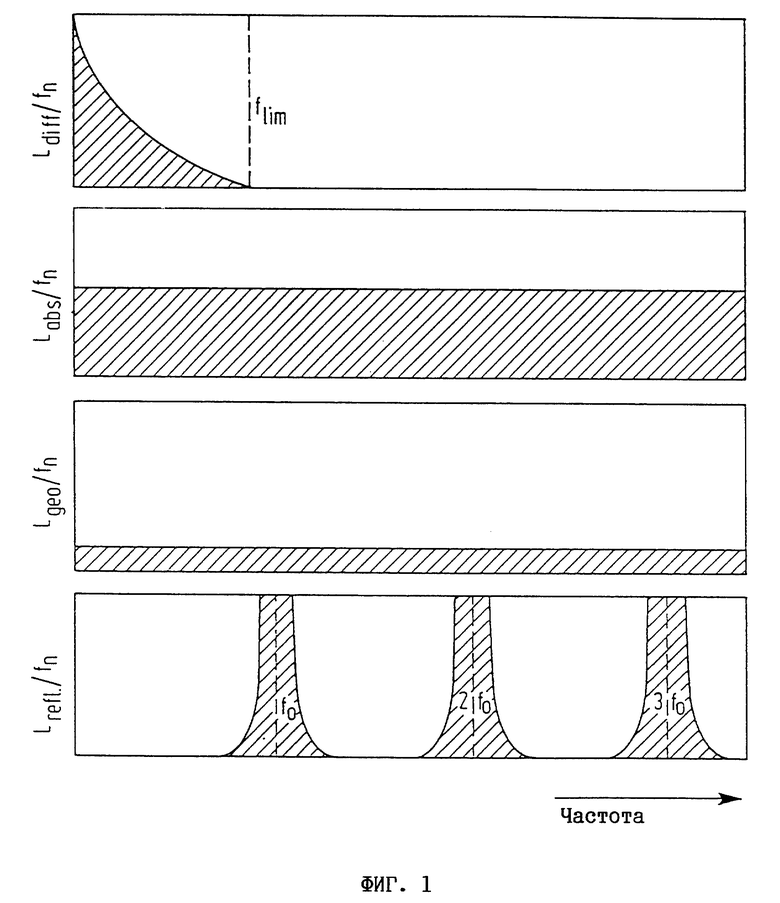
значения частоты fn, которому соответствует максимальное значение амплитуды ультразвуковых волн в заполненной пробой резонансной камере, и второго fn1 и третьего fn2 значений частоты, при которых величина амплитуды ультразвуковых волн меньше указанного максимального значения, определяют значение ширины полосы частот на уровне половинной мощности Δfn= fn1-fn2, по значению Δfn определяют значения потерь Lrefl, которые имеют место вблизи собственных частот преобразователей, связанных с неидеальными условиями отражения волн на поверхностях преобразователей, а затем определяют
-ln(cosθ) = π•d•fn•Lref1/c,
где с - скорость звука в жидкости;
d - расстояние между преобразователями,
затем, зная эту величину, определяют коэффициент J по соответствующей функции зависимости коэффициента J от значений -ln(cosθ) или с помощью числовой таблицы, после этого вычисляют отношение акустических импедансов z по формуле
z = J•tg(π•fn/fo),
где f0 - основная собственная частота преобразователей,
и искомое значение плотности определяют из соотношения
ρ = Zo•z/c,
где Z0 - акустический импеданс материала преобразователя.
