Изобретение относится к области медицинской техники, связанной с разработкой и применением ультразвуковых аппаратов для пластической хирургии, а именно, к способам управления процессом ультразвуковой липосакции, осуществляемой с применением ультразвуковых колебаний высокой интенсивности, и может быть использовано для создания современной материально-технической базы пластической хирургии.
Применение ультразвуковых колебаний высокой интенсивности для липосакции стало возможным благодаря эффекту ультразвуковой кавитации, обеспечивающему очень эффективное эмульгирование (растворение) жира в физиологическом растворе (растворе Кляйна). Одновременно с интенсификацией процесса липосакции, применение ультразвуковых колебаний обеспечило избирательное эмульгирование жировой ткани без травмирования окружающих сосудов и нервов, активное послеоперационное сокращение кожи пациента за счет стимулирующего воздействия ультразвука. При этом были сведены к минимуму послеоперационные осложнения. Эти преимущества сделали ультразвуковую липосакцию доступной и безопасной операцией.
При проведении ультразвуковой липосакции основной проблемой является необходимость обеспечения ультразвукового воздействия с необходимой и достаточной интенсивностью колебаний (т.е. интенсивностью, при которой в жировой эмульсии реализуется режим “развитой кавитации”) при использовании различных рабочих инструментов, а также при различных изменениях плотности и упругости жировой ткани.
Поэтому основными требованиями, предъявляемыми к ультразвуковым аппаратам для липосакции, являются [1, 2]:
- возможность контроля кавитирующего состояния обрабатываемой среды и установления мощности УЗ излучения, необходимой для поддержания в среде режима развитой кавитации (наиболее эффективного режима для образования жировой эмульсии);
- необходимость обеспечения “чувствительности” рабочего инструмента к контакту с костной и мышечной тканью пациента для снижения мощности УЗ излучения с целью избежания травмирования (ожога) указанных тканей УЗ колебаниями высокой интенсивности.
Таким образом, при проведении ультразвуковой липосакции возникает необходимость автоматического поддержания оптимальной интенсивности ультразвукового воздействия. Необходимость автоматического поддержания оптимальной интенсивности обусловлена следующими причинами:
1. Различиями в оптимальном режиме (оптимальной интенсивности) ультразвукового воздействия для различных пациентов или различных участков тела одного пациента, обусловленными различиями в акустических характеристиках жировой ткани у различных пациентов, и различием акустических характеристик жировых эмульсий различных участков тела одного пациента.
Изменения акустических характеристик жировой ткани и жировой эмульсии можно условно разделить на два вида: статическое и динамическое. Под статическими изменениями понимается изменение вида жировой ткани, т.е. области тела пациента, на котором проводится липосакция; изменение плотности жировой эмульсии в процессе увеличения в ней массовой доли растворенного (эмульгируемого) жира.
Под динамическими изменениями понимается изменение плотности среды в локализованном объеме вокруг окончания рабочего инструмента при возникновении и развитии в среде режима кавитации.
2. Наличием локализованных “включений” в жировой ткани, отличающихся по плотности и упругости от основной ткани (т.е. характеризуемых отличными от жировой эмульсии акустическими характеристиками). Такой процесс реализуется при соприкосновении излучающей поверхности рабочего инструмента с мясной или костной тканью пациента (демпфирование).
3. Изменяющимся усилием, прикладываемым хирургом к рабочему инструменту в процессе перемещения колебательной системы в жировой ткани пациента, обуславливающим различную степень акустического контакта и демпфирования.
Все перечисленные причины обуславливает необходимость оперативного, автоматического управления процессом ультразвуковой липосакции (изменения амплитуды ультразвуковых колебаний) при изменениях акустических свойств среды, жировой ткани и получаемой эмульсии.
Для оперативного, автоматического управления процессом ультразвуковой липосакции выбирается контролируемый параметр (критерий) - наиболее полно отражающий изменение акустических свойств среды и осуществляется непрерывный контроль этого параметра.
Наибольшее распространение в мировой практике проведения операций пластической хирургии получил способ управления процессом ультразвуковой липосакции [3], принятый за прототип и используемый при проведении операций с помощью ультразвукового оборудования фирмы "MENTOR".
Управление процессом ультразвуковой липосакции в этом способе, заключается в непрерывном контроле величины амплитуды тока и величины амплитуды электрического напряжения ультразвуковой колебательной системы и выработке управляющих сигналов для изменения амплитуды электрического напряжения, прикладываемого к преобразователю колебательной системы.
Контроль амплитуды колебаний излучающей поверхности рабочего инструмента по [3] осуществляют путем изменения амплитуды низковольтного сигнала, поступающего на усилитель мощности. В качестве параметра (критерия), несущего информацию об амплитуде механических колебаний излучающей поверхности рабочего инструмента, используют амплитуду электрического тока, протекающего через пьезоэлектрический преобразователь колебательной системы. Поэтому, стабилизация амплитуды механических колебаний рабочего инструмента осуществляется за счет стабилизации амплитуды электрического тока, протекающего через пьезопреобразователь колебательной системы. Сигнал, величина которого соответствует амплитуде тока, протекающего через пьезопреобразователь, выделяется и поступает на один из входов устройства сравнения, на второй вход которого поступает сигнал уставки (амплитуды колебаний, необходимой и достаточной для осуществления операции), задаваемой хирургом. В результате непрерывного осуществления операции сравнения, в зависимости от разности сигнала уставки и сигнала, определяющего текущую амплитуду механических колебаний, вырабатывается управляющий сигнал, обеспечивающий корректировку амплитуды низковольтного сигнала, поступающего на усилитель мощности и затем на электроды пьезоэлементов.
Способ управления процессом ультразвуковой липосакции [3] реализуется с помощью электронного генератора ультразвукового аппарата, входящего в состав ультразвукового оборудования фирмы "MENTOR" [1, 3] и имеет следующие недостатки:
1. При его использовании не обеспечивается оптимальное ультразвуковое воздействие на различные среды, что снижает эффективность ультразвукового эмульгирования. Известно [1], что при проведении ультразвуковой липосакции существует оптимальная интенсивность ультразвукового воздействия, которая определяется установлением в обрабатываемой среде режима развитой кавитации и зависит от свойств, температуры и дисперсности среды. Все эти параметры изменяются в процессе проведения липосакции. В способе, принятом за прототип, оценка интенсивности ультразвукового воздействия производится по амплитуде ультразвуковых колебаний, определяемой по значению тока, протекающего через пьезоэлементы колебательной системы. При реализации такого способа управления снижение эффективности ультразвукового воздействия обусловлено следующими причинами:
- для различных участков тела пациента необходимо обеспечить различную мощность УЗ излучения [1]. При реализации способа, принятого за прототип, она задается хирургом на основании его личного опыта, в виде амплитуды колебаний излучающей поверхности рабочего инструмента (по току, протекающему через колебательную систему). Такой подход является весьма субъективным, отсутствует возможность оперативного изменения мощности ультразвукового воздействия, в зависимости от локальных изменений свойств жировой ткани пациента;
- в процессе проведения липосакции в физиологическом растворе образуется эмульсия разрушаемого жира и содержание жира повышается. В результате изменяются акустические свойства обрабатываемой среды и изменяются условия ультразвукового воздействия. Таким образом, осуществляется воздействие на новую среду, отличную по акустическим свойствам от исходной среды. Для вновь образовавшейся среды существует своя, отличная от исходной, оптимальная эффективность ультразвукового воздействия. В прототипе это не учитывается.
В процессе проведения липосакции возможно касание излучающей поверхностью рабочего инструмента костной или мышечной ткани пациента. При этом происходит значительное уменьшение амплитуды колебаний излучающей поверхности рабочего инструмента (демпфирование). В способе, принятом за прототип, в этом случае, будет происходить увеличение амплитуды колебаний излучающей поверхности рабочего инструмента до величины, предварительно заданной хирургом. При этом возможно получение травм (ожогов) мышечной ткани или разрушение костной ткани пациента. Указанный недостаток способа, принятого за прототип, делает его применение не безопасным для здоровья пациента.
- При проведении операции хирург прижимает излучающую поверхность рабочего инструмента к жировой ткани пациента. Усилие прижатия может значительно изменяться в процессе операции. При прижатии происходит уменьшение амплитуды колебаний излучающей поверхности рабочего инструмента. В способе [3], при этом также будет происходить увеличение амплитуды колебаний излучающей поверхности рабочего инструмента до величины, предварительно установленной хирургом, которая, как правило, не является достаточной для образовании в среде режима развитой кавитации. Подобная ситуация реализуется, также, при частичном демпфировании излучающей поверхности рабочего инструмента (частичное перекрытие излучающей поверхности).
Очевидно, что рассмотренный недостаток способа, принятого за прототип, обусловлен неправильным выбором критерия оценки и поддержания необходимой интенсивности ультразвукового воздействия, не позволяющим учитывать все особенности процесса ультразвуковой липосакции и обеспечивать оптимальное ультразвуковое воздействие на всех этапах операции и для различных пациентов.
Таким образом, выявленные недостатки снижают эффективность известного способа управления процессом ультразвуковой липосакции [3], обуславливают снижение качества и производительности операции ультразвуковой липосакции, а в некоторых случаях делают ее опасной для жизни пациентов.
Предлагаемое техническое решение направлено на устранение недостатков существующего способа и создание способа управления процессом ультразвуковой липосакции, способного обеспечить повышение эффективности ультразвукового воздействия, повысить качество и производительность операций липосакции, исключить опасность ожогов для пациентов. Кроме того, практическая реализация нового способа управления процессом ультразвуковой липосакции обеспечит повышение привлекательности операции и снизит ее стоимость.
Предлагаемое изобретение заключается в том, что в известном способе управления процессом ультразвуковой липосакции, заключающемся в непрерывном контроле величины амплитуды тока и величины амплитуды электрического напряжения ультразвуковой колебательной системы и выработке управляющих сигналов для изменения амплитуды электрического напряжения, прикладываемого к преобразователю колебательной системы, контролируют величину амплитуды тока, являющегося разностью между током, протекающим через пьезоэлектрические элементы преобразователя колебательной системы, и реактивной емкостной составляющей этого тока, обусловленной собственной электрической емкостью пьезоэлектрических элементов. По измеренным амплитуде тока и амплитуде напряжения определяют значения волнового сопротивления акустической нагрузки колебательной системы. При этом каждое из полученных значений волнового сопротивления сравнивают с предыдущим или принимают в качестве исходного значения при первом измерении. В случае, если полученное значение волнового сопротивления отличается от предыдущего - увеличивают или уменьшают амплитуду электрического напряжения, подаваемого от электронного генератора на преобразователь до тех пор, пока полученное значение волнового сопротивления и его предыдущее значение не сравняются.
Таким образом, в случае изменения условий ультразвуковой липосакции и повышения волнового сопротивления акустической нагрузки колебательной системы, производят увеличение амплитуды питающего электрического напряжения при непрерывном измерении волнового сопротивления акустической нагрузки преобразователя до тех пор, пока измеренное значение волнового сопротивления и его предыдущее значение не сравняются, а в случае уменьшения волнового сопротивления акустической нагрузки колебательной системы производят уменьшение амплитуды питающего электрического напряжения при непрерывном измерении волнового сопротивления акустической нагрузки преобразователя до тех пор, пока измеренное значение волнового сопротивления и его предыдущее значение не сравняются.
Суть предлагаемого технического решения заключается в том, что для управления процессом ультразвуковой липосакции предлагается контролировать состояние и изменение состояния среды (акустические свойства среды), в которой находится излучающая поверхность рабочего инструмента. В качестве параметра, несущего информацию об изменениях акустических свойств среды, предлагается использовать величину волнового сопротивления обрабатываемой среды.
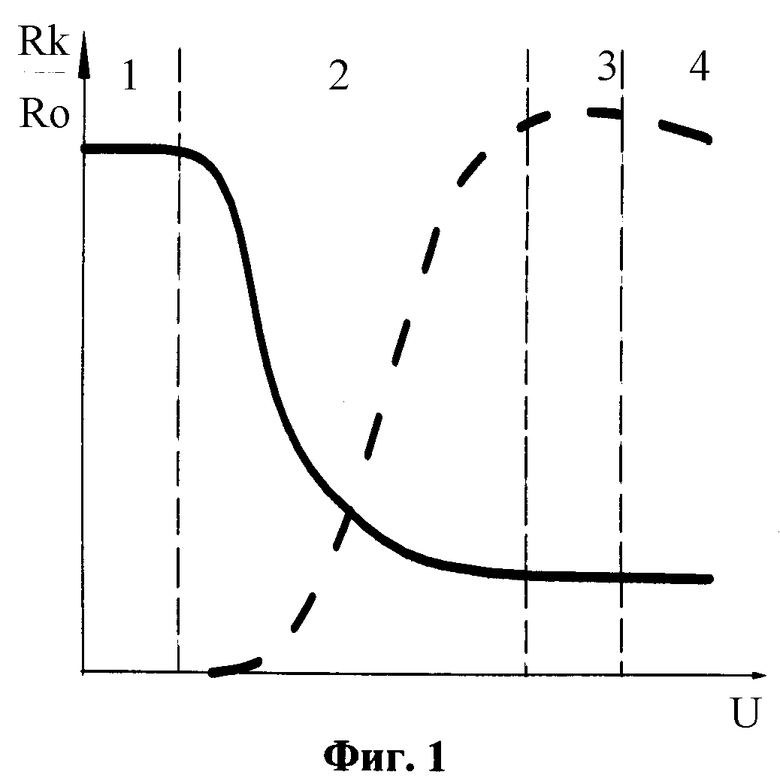
Сущность предлагаемого технического решения поясняется фиг.1. На фиг.1 приведена зависимость волнового сопротивления среды (сплошная линия) и эффективности кавитации (пунктирная линия) от напряжения питания ультразвукового преобразователя и, следовательно, от мощности ультразвукового излучения. Данные, характеризующие изменение волнового сопротивления, представлены в виде зависимости отношения волнового сопротивления кавитирующей жидкости к волновому сопротивлению жидкости в отсутствие кавитации. По оси ординат значения приведены вне масштабной сетки. Приведенная зависимость характерна для всех сред, в которых при осуществлении ультразвукового воздействия возникает и развивается кавитация.
Представленная зависимость объясняется следующим образом. Известно, что эффективность кавитации прямо пропорциональна степени развитости кавитации, которая, в свою очередь, однозначно определяется индексом кавитации. Индексом кавитации называется отношение [4]:

где V - объем в кавитационной области,
ΔV - объем всех находящихся внутри объема V кавитационных пузырьков в фазе их наибольшего расширения.
Индекс кавитации определяется как отношение суммарного объема газовых кавитационных пузырьков ко всему объему кавитационной области. Величина К лежит в пределах 0≤К≤1. Так как размеры отдельных пузырьков и их скоплений оказываются существенно меньше объема кавитационной области, то возможно рассматривать жидкость, вместе с имеющимися в ней газовыми вкраплениями, как некую новую среду с эквивалентными акустическими характеристиками, отличными от акустических характеристик жидкости при отсутствии кавитации.
Одной из основных акустических характеристик жидкости является ее волновое сопротивление [4]. Волновое сопротивление жидкости (или любой другой среды) может быть определено по следующей формуле:

где ρ - плотность среды;
с - скорость распространения ультразвуковых колебаний в среде.
Из формулы следует, что волновое сопротивление жидкости будет уменьшаться с увеличением степени развитости кавитации, поскольку плотность среды будет уменьшаться за счет увеличивающегося числа кавитационных пузырьков. Для определения степени корреляции между изменением волнового сопротивления жидкости и изменением индекса кавитации был проведен ряд экспериментов. Индекс кавитации определялся при помощи дилатометрического способа, описанного в [5]. Изменение волнового сопротивления жидкости проводилось по методике, описанной в [5]. Результаты экспериментов представлены на фиг.1.
Из кривых, представленных на фиг.1, следует, что при увеличении напряжения питания преобразователя колебательной системы, индекс кавитации увеличивается, а волновое сопротивление резко уменьшается и при достижении индексом кавитации значений, близких к единице, приближается к значению волнового сопротивления воздуха. При дальнейшем увеличении напряжения питания электроакустического преобразователя происходит уменьшение индекса кавитации, а значение волнового сопротивления остается на прежнем уровне.
Кривую зависимости волнового сопротивления жидкости от напряжения питания электроакустического преобразователя можно условно разбить на четыре участка, соответствующих возможным состояниям среды при проведении операции липосакции, которые показаны на фиг.1 (сплошная линия).
Участок 1 соответствует малым мощностям ультразвукового воздействия и отсутствию в жидкости кавитации. На этом участке волновое сопротивление жидкости остается постоянным и соответствует волновому сопротивлению жидкости без наличия кавитационных пузырьков.
Участок 2 соответствует зарождению и развитию кавитации в жидкости. При этом происходит образование парогазовых пузырьков вокруг излучающей поверхности рабочего инструмента, падение плотности обрабатываемой жидкости, уменьшение скорости звука и, как следствие, достаточно резкое уменьшение волнового сопротивления среды.
Участок 3 соответствует режиму установившейся, развитой кавитации. При этом волновое сопротивление жидкости остается практически постоянным, а вокруг излучающей поверхности рабочего инструмента имеется стационарное кавитационное облако, число парогазовых пузырьков в котором близко к максимально возможному. Реализация такого режима является условием наиболее эффективного протекания процесса эмульгирования и, следовательно, ультразвуковой липосакции.
Участок 4 соответствует режиму чрезмерно развитой кавитации. При этом газовые пузырьки в кавитационном облаке, за счет объединения, увеличиваются в размерах и перестают захлопываться, происходит их пульсация с частотой ниже частоты ультразвука, на частоте субгармоник. В этом случае, эффективность процесса эмульгирования значительно снижается, а потребление мощности аппарата от электрической сети резко возрастает.
Из полученных результатов следует, что для поддержания в жидкости режима развитой кавитации необходимо поддерживать волновое сопротивление жидкости в границах третьего участка. Так как зависимость волнового сопротивления жидкости от индекса кавитации имеет не экстремальный характер, то для определения момента достижения индексом кавитации максимального значения предлагается использовать критерий прекращения уменьшения значения волнового сопротивления при увеличении напряжения питания электроакустического преобразователя. Для этого измеряют значение волнового сопротивления и сравнивают его с предыдущим значением.
Как было сказано выше, в процессе проведения операции липосакции возможны три отклонения от установившегося режима ультразвукового воздействия. Это изменение вида жировой ткани, изменение концентрации жира в образующейся эмульсии и демпфирование излучающей поверхности окончания рабочего инструмента.
Первые два отклонения от установившегося режима ультразвукового воздействия имеют одну физическую природу и вызнаны изменениями в акустических свойствах озвучиваемой среды. Поэтому эти два случая возможно рассматривать совместно.
На фиг.2а представлены зависимости волнового сопротивления обрабатываемой среды от напряжения питания электроакустического преобразователя колебательной системы для трех различных видов жировой ткани, а равно и для трех жировых эмульсий, с различной концентрацией жира. Видно, что все три кривые асимптотически приближаются к одному значению, но при различных значениях напряжения питания электроакустического преобразователя. Это значение равно волновому сопротивлению газовой среды (воздуха). Это объясняется тем, что при значении индекса кавитации, близком к единице, вокруг излучающей поверхности рабочего инструмента образуется плотное облако кавитационных пузырьков, которое практически полностью вытесняет окружающую жидкую среду. При этом “оставшаяся” среда оказывает незначительное влияние на значение волнового сопротивления.
Как и следовало ожидать, полученные зависимости сдвинуты по оси абсцисс. Это объясняется тем, что для каждой среды существует своя мощность ультразвукового воздействия, при которой достигается максимальная эффективность кавитационного воздействия и, следовательно, значение напряжения, при котором значение волнового сопротивления среды выходит на пологий участок. Этим подтверждается возможность применения предложенного способа для определения оптимальной мощности ультразвукового воздействия для различных сред.
Случаи частичного демпфирования колебательной системы о жировую ткань пациента представлены на фиг.2б. Представленные зависимости характеризуются различной силой прижима излучающей поверхности к жировой ткани пациента. При этом, сила прижима для среды, характеризуемой зависимостью 3, больше силы прижима для среды, характеризуемой зависимостью 2, и больше силы прижима для среды, характеризуемой зависимостью 1. Также волновое сопротивление среды 3 больше волнового сопротивления среды 2, которое больше волнового сопротивления среды 1.
В этом случае смещение зависимостей волнового сопротивления среды от напряжения питания колебательной системы по оси абсцисс (напряжений) определяется силой прижима колебательной системы к жировой ткани.
Смещение по оси ординат (волновое сопротивление) определяется значением волнового сопротивления среды, о которую осуществляется демпфирование, и которое определяется как некоторая “добавка” к волновому сопротивлению кавитирующей эмульсии. Величина этой добавки зависит от площади прижима. Чем больше площадь прижима, тем больше значение добавки.
В случае полного демпфирования излучающей поверхности рабочего инструмента колебательной системы обрабатываемой средой, величина “добавка” к волновому сопротивлению кавитирующей эмульсии, будет значительна. Кроме того, в этом случае, в среде не будет развиваться кавитация и, следовательно, не будет происходить уменьшение волнового сопротивления среды. Получающаяся зависимость представлена на фиг.2в. Ro - собственное акустическое сопротивление среды (тканей пациента), о которую производится демпфирование. Представленная зависимость значительно отличается от рассмотренных ранее и случай полного демпфирования излучающего окончания колебательной системы, который может привести к травмированию пациента, легко обнаружить. Экспериментальные исследования позволили установить, что подобные зависимости получаются при демпфировании более 2/3 от площади излучающей поверхности окончания колебательной системы.
Для практической реализации предложенного способа управления процессом ультразвуковой липосакции, за счет установления и поддержания режима развитой кавитации в жидкой среде, необходим простой и надежный способ измерения волнового сопротивления жидкости. Существующие способы измерения волнового сопротивления жидкости основаны на использовании внешних гидроакустических датчиков. Но это значительно усложняет конструкцию, а в случае проведения операций липосакции технически нереализуемо. Кроме того, введение датчиков в той или иной степени вносит изменение в протекающий технологический процесс и искажает картину регистрируемого процесса.
Для измерения волнового сопротивления обрабатываемой среды, в предложенном техническом решении используются измерения электрических параметров ультразвуковой колебательной системы, используемой для создания акустического поля в технологической среде. Таким образом, сама рабочая УЗКС выступает в качестве датчика параметров технологической среды.
Для пояснения процесса измерения волнового сопротивления среды в предложенном способе управления процессом ультразвуковой липосакции необходимо произвести анализ физической эквивалентной схемы ультразвуковой колебательной системы на основе пьезоэлектрических элементов [6], показанной на фиг.3а.
Ветвь, содержащая последовательно установленные катушку с индуктивностью Lм, конденсатор с электрической емкостью См и резистор с номинальным сопротивлением Rм, является эквивалентной электрической схемой механической ветви (имитирующей механические колебания ультразвукового преобразователя) колебательной системы. Элементы Lм и См имитируют массу и упругость материала колебательной системы, соответственно. Элемент (резистор) с номинальным сопротивлением Rм характеризует потери энергии в материале колебательной системы и сопротивление (импеданс) излучению УЗ колебаний в обрабатываемую среду. Сопротивление Rм пропорционально волновому сопротивлению среды с коэффициентом пропорциональности М. Коэффициент пропорциональности зависит от конструкции колебательной системы (коэффициента усиления) и площади излучающей поверхности. Элемент (конденсатор с электрической емкостью) С соответствует собственной электрической емкости пьезокерамических элементов, входящих в состав пьезопреобразователя.
В общем случае волновое сопротивление среды состоит из двух составляющих - действительной и мнимой частей. Действительная часть влияет на амплитуду ультразвуковых колебаний и в рассматриваемом способе является информативным параметром. Мнимая часть характеризует изменения резонансной частоты электроакустического преобразователя и в модели колебательной системы может быть представлена в виде “добавок”, к номинальным значениям элементов Lм и См.
Работа колебательной системы имеет смысл только на резонансной частоте - т.е. при равенстве рабочей частоты генератора и собственной механической частоты колебательной системы. На резонансной частоте колебательной системы, т.е. на собственной частоте колебательного контура, состоящего из элементов Lм и См, их сопротивление уменьшается до нуля, и остаются только “добавки”, обусловленные мнимой частью волнового сопротивления. Для исключения влияния мнимой части волнового сопротивления среды необходимо наличие системы автоматической подстройки частоты, обеспечивающей постоянную работу системы на частоте механического резонанса. Такие системы имеются в современных ультразвуковых аппаратах (в т.ч. и в аппаратах для ультразвуковой липосакции). Следовательно, эквивалентная схема колебательной системы может быть представлена в виде, показанном фиг.3б.
Из эквивалентной схемы на фиг.3б следует, что, на резонансной частоте возможно измерять только действительную часть волнового сопротивления и для этого необходимо измерять ток, протекающий через сопротивление излучению колебательной системы Rм, и регистрировать падение напряжения на нем. Так как необходимо контролировать зависимость изменения волнового сопротивления среды от напряжения питания колебательной системы, а не измерять его точное численное значение, то нет необходимости в определении коэффициента пропорциональности М для установления точного соотношения между сопротивлением излучению Rм и волновым сопротивлением среды.
Измерение выбранного параметра - волнового сопротивления среды, осуществляется при помощи устройства, включающего в себя дифференциальный усилитель, обеспечивающий выделение сигнала, АЧХ которого соответствует АЧХ тока в механической ветви (Lм, См, Rм), и трансформатор напряжения, при помощи которого измеряется напряжение на колебательной системе.
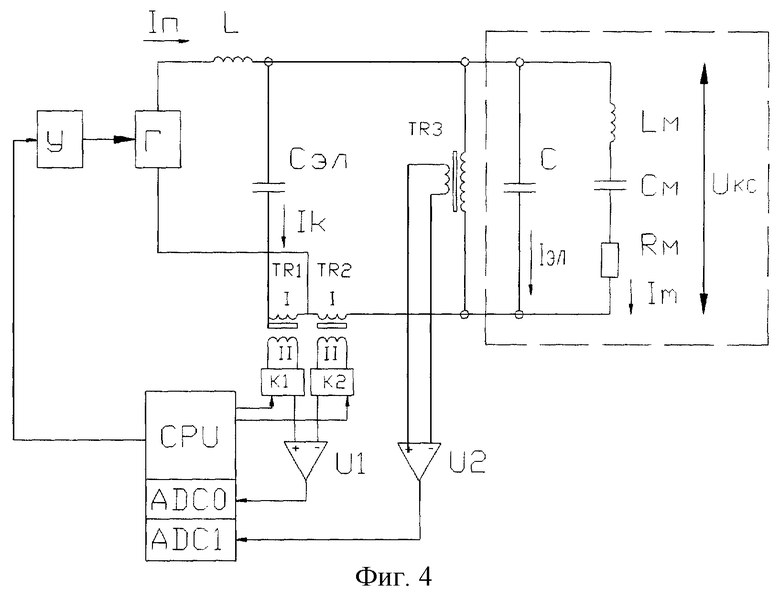
На фиг.4 представлена принципиальная электрическая схема устройства измерения волнового сопротивления среды, с возможностью компенсации изменения электрической емкости С, вызванного нагревом колебательной системы в процессе работы, поясняющая практическую реализацию предложенного технического решения.
Представленная схема состоит из двух блоков: блока измерения амплитудного значения тока, протекающего в механической ветви Lм, См, Rм, и блока измерения амплитуды напряжения на колебательной системе.
Блок измерения амплитудного значения тока работает следующим образом. При равенстве параметров токовых трансформаторов TR1 и TR2, емкостей Сэл и С, коэффициентов усиления усилителей К1 и К2, на выходе дифференциального усилителя U1 появляется напряжение с амплитудой, прямо пропорциональной амплитуде тока, протекающего по ветви Lм, См, Rм. Сигнал на выходе дифференциального усилителя равен:
U=K2KT2(Iэл+Iм)-K1KT1Iк,
К1 и К2 - коэффициенты усиления усилителей К1 и К2.
KT1 и КТ2 - коэффициенты трансформации трансформаторов TR1 и TR2. При условиях K1=K2, КТ1=КТ2, Сэл=С следует:
U=К2КТ2Iм.
При неравенстве емкостей Сэл и С, например, при изменения емкости С в процессе работы колебательной системы из-за ее разогрева, выполнение последнего равенства добиваются изменением коэффициента усиления K1 усилителя К1.
Таким образом, на входе ADC0 аналого-цифрового преобразователя формируется сигнал с напряжением, прямо пропорциональным току в механической ветви колебательной системы, т.е. току, протекающему через элементы Lм, См, Rм.
Блок измерения амплитудного значения напряжения на колебательной системе работает следующим образом. С трансформатора напряжения на вход амплитудного усилителя U2 поступает сигнал, пропорциональный напряжению на электродах пьезоэлементов колебательной системы. На выходе амплитудного усилителя U2 появляется сигнал, амплитуда которого пропорциональна амплитуде напряжения на колебательной системе. На входе аналого-цифрового преобразователя ADC1 присутствует напряжение, равное:
U=КU2KTR3UКC,
KU2 - коэффициент усиления усилителя U2,
КTR3 - коэффициент трансформации трансформатора TR3.
На основе полученных данных блок микропроцессора CPU рассчитывает значение волнового сопротивления среды, производит сравнение с предыдущим значением и вырабатывает соответствующее управляющее воздействие для блока управления У генератора Г.
Практическая реализация предложенного способа управления процессом ультразвуковой липосакции была осуществлена при помощи разработанного ультразвукового генератора, структурная схема которого иллюстрируется фиг.5. Управление процессом ультразвуковой липосакции при помощи этого генератора осуществляется следующим образом:
Частотозадающий генератор, управляемый напряжением (ГУН) 2, вырабатывает низковольтный прямоугольный сигнал ультразвуковой частоты, который поступает, с одной стороны, на вход транзисторного полумостового инвертора 3, а с другой стороны, поступает на один из входов фазового компаратора 1. С выхода инвертора 3 прямоугольный сигнал ультразвуковой частоты с амплитудой, задаваемой регулятором напряжения 5 и лежащей пределах 0...300 В, поступает на согласующий LC фильтр 4, который выделяет из прямоугольного сигнала первую гармонику и согласует выходной импеданс инвертора 3 с входным импедансом преобразователя 13. Узел 6, при помощи дифференциальной схемы (представленной на фиг.5), выделяет сигнал, который несет в себе информацию об амплитуде тока в механической ветви преобразователя 13. Этот сигнал поступает на дискриминаторы 8 и 9. На выходе дискриминатора 8 появляется прямоугольный цифровой сигнал с той же фазой и частотой, что и ток, протекающий в механической ветви преобразователя 13, который поступает на второй вход фазового компаратора 1. На выходе дискриминатора 8 появляется сигнал, прямо пропорциональный амплитуде тока, протекающего в механической ветви преобразователя, который поступает на один из входов узла вычисления волнового сопротивления среды 11. Узел 7 при помощи трансформатора напряжения (представленного на схеме на фиг.5) выделяет сигнал, который несет в себе информацию о напряжении на электродах пьезоэлементов колебательной системы. Этот сигнал поступает на дискриминатор 10, на выходе которого появляется сигнал, прямо пропорциональный амплитуде напряжения на колебательной системе. Этот сигнал поступает на другой вход узла вычисления волнового сопротивления среды 11. Вычисленное значение волнового сопротивления среды в цифровом виде поступает на вход схемы управления 12. При помощи системы управления 12 происходит управление аппаратом в целом: включение и выключение, управление регулятором напряжения 5, калибровка дифференциальной схемы 6. Схема управления 12 вырабатывает сигнал рассогласования, который определяется разностью между полученным значением волнового сопротивления и его предыдущим значением и поступает на регулятор напряжения 5, питающий инвертор 3. При равенстве полученного значения волнового сопротивления и его предыдущего значения, регулятор напряжения 5 фиксирует на своем выходе текущее напряжение. При появлении разности между полученным значением волнового сопротивления и его предыдущим значением, схема управления 12 вырабатывает сигнал, на основе которого регулятор 5 увеличивает или уменьшает напряжение питания инвертора 3 до тех пор, пока полученное значение волнового сопротивления и его предыдущее значение не сравняются. Таким образом, ультразвуковой аппарат обеспечивает поддержание волнового сопротивления среды на уровне, определяющем наличие в озвучиваемой среде режима развитой кавитации (наиболее эффективного режима воздействия при эмульгировании жира).
Автоматическая подстройка частоты электронного генератора в соответствии с изменениями резонансной частоты колебательной системы (необходимое условие для устранения влияния мнимой части волнового сопротивления) происходит в результате сравнения фаз сигналов на входе фазового компаратора 1. В случае равенства фаз сигналов, поступающих на вход компаратора 1 ГУН 2, фиксируют текущую частоту, то есть электронный генератор и рабочий инструмент согласованы по частоте. В случае несовпадения фаз сравниваемых сигналов - фазовый компаратор вырабатывает управляющий сигнал для задающего генератора 2, который, в свою очередь, подстраивает свою частоту таким образом, чтобы сигналы на входе фазового компаратора совпадали по фазе.
Техническим результатом данного изобретения является управление процессом ультразвуковой липосакции на основании контроля состояния и изменения состояния среды, в которой находится излучающая поверхность рабочего инструмента за счет вычисления величины волнового сопротивления обрабатываемой среды. В результате реализации предлагаемого технического решения оптимизирована работа аппарата для пластической хирургии, с точки зрения обеспечения максимальной эффективности ультразвукового воздействия на различных этапах проведения операции (максимальная производительность), при минимальном нагреве преобразователя и сменных инструментов.
Разработанный в лаборатории акустических процессов и аппаратов Бийского технологического института Алтайского государственного технического университета способ управления процессом ультразвуковой липосакции прошел лабораторные и медико-технические испытания. Максимальная амплитуда колебаний составила 250 мкм, время одной процедуры липосакции на максимальной мощности не более 40 минут (вместо 2 часов), при этом корпус не нагревался свыше 40-45°С. Максимальный размер сменного рабочего инструмента (вместе с охлаждающим кожухом) не более 6,5 мм в поперечном сечении.
В настоящее время Бийским технологическим институтом ведется подготовка к серийному производству ультразвуковых аппаратов для липосакции, в основу которых положен предложенный способ управления процессом ультразвуковой липосакции. Мелкосерийное производство аппаратов для липосакции планируется начать в 2003 году.
Список литературы
1. Technische Weiterentwicklung und klinische Evaluierung. Michele L., Zocchi, MD, PhD, CLINICS IN PLASTIC SURGERY JAHRGANG 23, NUMMER 4, OKTOBER 1996.
2. Ronald R. Manna, Vaclav Podany. Ultrasonic lipectomy probe and metod for manufacture. Patent US №5527273.
3. Vaclav O., Bollinger; Stephen A. Ultrasonic assisted liposuction system. Patent US №6013048 (прототип).
4. Агранат Б.А., Башкиров В.И., Китайгородский Ю.И., Хавский Н.Н. Ультразвуковая технология. М., 1974.
5. Казанцев В.Ф. Расчет ультразвуковых преобразователей для технологических установок. - М., Машиностроение, 1980.
6. Теумин И.И. Ультразвуковые колебательные системы. - М., ГНТИ машиностроительной литературы, 1959.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ ПРОЦЕССОМ ВНЕШНЕЙ УЛЬТРАЗВУКОВОЙ ЛИПОСАКЦИИ | 2010 |
|
RU2440165C1 |
| СПОСОБ УПРАВЛЕНИЯ ПРОЦЕССОМ УЛЬТРАЗВУКОВОЙ ЛИПОСАКЦИИ | 2003 |
|
RU2240073C1 |
| УЛЬТРАЗВУКОВАЯ КОЛЕБАТЕЛЬНАЯ СИСТЕМА ДЛЯ ПЛАСТИЧЕСКОЙ ХИРУРГИИ | 2002 |
|
RU2239383C2 |
| Способ испытаний кавитационной эрозии | 2020 |
|
RU2739145C1 |
| СПОСОБ КОНТРОЛЯ СВОЙСТВ ЖИДКИХ СРЕД | 2011 |
|
RU2473076C2 |
| СПОСОБ УПРАВЛЕНИЯ ПРОЦЕССОМ УЛЬТРАЗВУКОВОГО РАСПЫЛЕНИЯ | 2011 |
|
RU2465965C1 |
| СПОСОБ КОМПЛЕКСНОЙ КОСМЕТИЧЕСКОЙ ОБРАБОТКИ ПОВЕРХНОСТНЫХ ТКАНЕЙ ПАЦИЕНТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2009 |
|
RU2413492C2 |
| УЛЬТРАЗВУКОВАЯ КОЛЕБАТЕЛЬНАЯ СИСТЕМА | 2008 |
|
RU2384373C1 |
| Устройство для проведения хирургических операций с применением ультразвуковых колебаний | 2021 |
|
RU2774586C1 |
| УСТРОЙСТВО ПОТОКОВОГО УЛЬТРАЗВУКОВОГО ДИСПЕРГИРОВАНИЯ ВЯЗКИХ ЛАКОКРАСОЧНЫХ СУСПЕНЗИЙ | 1995 |
|
RU2081705C1 |



Изобретение относится к области медицинской техники, связанной с разработкой и применением ультразвуковых аппаратов для пластической хирургии, а именно, к способам управления процессом ультразвуковой липосакции, осуществляемым с применением ультразвуковых колебаний высокой интенсивности. Способ заключается в непрерывном контроле величины амплитуды тока и величины амплитуды электрического напряжения ультразвуковой колебательной системы и выработке управляющих сигналов для изменения амплитуды электрического напряжения, прикладываемого к преобразователю колебательной системы, при этом в процессе проведения липосакции контролируют величину амплитуды тока, являющегося разностью между током, протекающим через пьезоэлектрические элементы преобразователя колебательной системы и реактивной емкостной составляющей этого тока, обусловленной собственной электрической емкостью пьезоэлектрических элементов. По измеренным амплитуде тока и амплитуде напряжения определяют значения волнового сопротивления акустической нагрузки колебательной системы, при этом каждое из полученных значений волнового сопротивления сравнивают с предыдущим или принимают в качестве исходного значения при первом измерении. В случае, если полученное значение волнового сопротивления отличается от предыдущего - увеличивают или уменьшают амплитуду электрического напряжения, подаваемого от электронного генератора на преобразователь до тех пор, пока полученное значение волнового сопротивления и его предыдущее значение не сравняются. Использование изобретения позволяет управлять процессом ультразвуковой липосакции на основании контроля состояния и изменения состояния среды, в которой находится излучающая поверхность рабочего инструмента за счет вычисления величины волнового сопротивления обрабатываемой среды. 5 ил.
Способ управления процессом ультразвуковой липосакции, заключающийся в непрерывном контроле величины амплитуды тока и величины амплитуды электрического напряжения ультразвуковой колебательной системы и выработке управляющих сигналов для изменения амплитуды электрического напряжения, прикладываемого к преобразователю колебательной системы, отличающийся тем, что в процессе проведения липосакции контролируют величину амплитуды тока, являющегося разностью между током, протекающим через пьезоэлектрические элементы преобразователя колебательной системы и реактивной емкостной составляющей этого тока, обусловленной собственной электрической емкостью пьезоэлектрических элементов, по измеренным амплитуде тока и амплитуде напряжения определяют значения волнового сопротивления акустической нагрузки колебательной системы, при этом каждое из полученных значений волнового сопротивления сравнивают с предыдущим или принимают в качестве исходного значения при первом измерении, в случае, если полученное значение волнового сопротивления отличается от предыдущего, - увеличивают или уменьшают амплитуду электрического напряжения, подаваемого от электронного генератора на преобразователь, до тех пор, пока полученное значение волнового сопротивления и его предыдущее значение не сравняются.
| US 6013048 А, 11.01.2000 | |||
| СПОСОБ ДЛЯ КОМПЛЕКСНОЙ ФОТОКОРРЕКЦИИ ВЕСА | 2000 |
|
RU2203112C2 |
| 2001 |
|
RU2192241C1 | |
| US 6461350 В1, 08.10.2002 | |||
| US 6379326 А, 30.04.2002. | |||

