Изобретение относится к области медицинской техники, а именно к устройству для работающему совместно с акустическими узлами - пьезокерамическими колебательными системами с присоединяемыми к ним волноводами - инструментами (АУВИ) - ультразвуковыми хирургическими инструментами разного типа при их одновременном подключении для проведения операций, например, в проктологии для ультразвукового операционного воздействия на кровеносный сосуд или кавернозное тело и пластических реконструктивных хирургических операций в колопроктологии, осуществляемых с применением ультразвуковых колебаний высокой интенсивности и с возможностью контроля параметров в процессе работы.
Устройство для проведения хирургических операций состоит из генератора ультразвуковых колебаний и одновременно подключенных АУВИ, отличающихся геометрией и размерами и, как следствие, имеющих различные частоты механического резонанса и различные значения электрической емкости.
Необходимость разработки и применения такого устройства связана с необходимостью снижения аппаратурной загрузки операционных помещений, и необходимостью применения нескольких ультразвуковых хирургических инструментов разного типа, работающих на разных резонансных частотах и подсоединяемых к пьезокерамическим колебательным системам с разным значением электрической емкости в течение одной хирургической операции (симультанные операции).
Традиционная схема генераторов для питания пьезоэлектрических акустических узлов состоит из задающего генератора прямоугольных импульсов, усилителя мощности прямоугольных импульсов, индуктивного элемента, подключенного между выходом усилителя мощности и входом пьезоэлектрического акустического узла АУВИ, схемы компенсации электрической емкости пьезоэлементов ультразвуковой колебательной системы, схемы фазовой автоподстройки частоты (ФАПЧ) и схемы регулирования и поддержания уровня мощности в необходимых пределах. Значение электрической индуктивности индуктивного элемента жестко связано со значением электрической емкости и значением частоты механического резонанса АУВИ. Номиналы элементов схемы компенсации электрической емкости пьезоэлементов ультразвуковой колебательной системы так же жестко связаны с электрической емкостью, подключенного АУВИ. Это означает, что все АУВИ, подключаемые к находящемуся в эксплуатации генератору, должны иметь одинаковую частоту механического резонанса и одинаковое значение электрической емкости пьезоэлементов ультразвуковой колебательной системы.
Это значительно ограничивает эксплуатационные возможности потому, что невозможно подключить АУВИ к уже имеющемуся в хирургической операционной генератору, значение электрической емкости и значение частоты механического резонанса которых отличается от тех значений, под которые был изготовлен эксплуатируемый генератор.
Необходимость разработки АУВИ с различной частотой механического резонанса и различной электрической емкостью пьезоэлементов-ультразвуковой колебательной системы диктуется расширением применения ультразвуковых технологий для лечения различных патологий и, как следствие, различными техническими требованиями, основными из которых являются вид ультразвукового воздействия на биологические ткани и массогабаритные характеристики.
Необходимым условием для эффективной работы АУВИ является наличие переменного напряжения, прикладываемого к электродам пьезоэлектрического преобразователя, частота которого соответствует частоте механического резонанса АУВИ. При этом фаза тока в цепи должна совпадать с фазой прикладываемого напряжения. Одновременно с этим, для управления амплитудой колебаний рабочей части ультразвуковых хирургических инструментов, и, как следствие, интенсивностью хирургического воздействия, необходимо контролировать амплитуду тока в цепи акустического узла и стабилизировать ее в соответствии с установленными медицинским персоналом значениями. На значение частоты механического резонанса, амплитуды и фазы тока в цепи акустического узла оказывают множество дестабилизирующих факторов. К наиболее значимым можно отнести механическую и гидродинамическую нагрузку (степень контакта рабочей части ультразвуковых хирургических инструментов с биологическими тканями), температуру ультразвуковых хирургических инструментов и температуру пьезоэлектрического преобразователя, входящего в АУВИ.
Известно устройство для ультразвукового воздействия, включающего генератор ультразвукового сигнала, обеспечивающий подачу сигнала на съемный ультразвуковой хирургический инструмент, содержащий съемный концентратор-волновод, (см. описание изобретения к патенту RU №2214193 «Способ, система и инструмент для ультразвукового воздействия на кровеносный сосуд или кавернозное тело», МПК А61В 18/00, A61N 7/00, опубл. 20.10.2003).
Генератор известного устройства не позволяет использовать его с несколькими АУВИ одновременно и, тем более, с АУВИ, значение электрической емкости и значение частоты механического резонанса которых отличаются, что сужает возможности использования этого устройства и является его недостатком. Кроме того, генератор не имеет возможности определения характеристик нового (стороннего) АУВИ, присоединяемого к генератору.
Известно устройство для ультразвукового воздействия, содержащее электрохирургический контроллер, включающий процессор, запоминающее устройство, соединенное с процессором, генератор напряжения, функционально соединенный с процессором, и содержащий активную клемму для соединения посредством соединителя с ультразвуковым хирургическим инструментом (см. описание изобретения RU №2657960 «Электрохирургические системы и способы», МПК А61В 18/12, А61В 17/34, А61М 25/01, опубл. 18.06.2018).
Контроллер выполнен с возможностью соединения с перистальтическим насосом, содержащим ротор, соединенный с электродвигателем, при этом электродвигатель функционально соединен с процессором. В запоминающем устройстве хранится программа, которая, при ее исполнении процессором, побуждает процессор осуществлять, по меньшей мере, два режима функционирования в ходе электрохирургической операции.
Генератор известного устройства не позволяет использовать его с несколькими АУВИ одновременно и, тем более, с АУВИ, значение электрической емкости и значение частоты механического резонанса которых отличаются, что сужает возможности использования этого устройства и является его недостатком. Кроме того, генератор не имеет возможности определения характеристик нового (стороннего) АУВИ, присоединяемого к генератору.
Ближайшим к заявляемому техническому решению, принятым в качестве прототипа, является устройство для ультразвукового воздействия, включающего микропроцессорный блок управления, генератор ультразвукового сигнала, обеспечивающий подачу сигнала через акустический узел - ультразвуковой пьезоэлектрический преобразователь на съемный ультразвуковой хирургический волновод-инструмент, и обеспечивающий возможность сравнения амплитуды тока посредством схемы сравнения с амплитудой тока, задаваемой с блока управления, и корректировки амплитуды электрического напряжения и частоты, прикладываемых к съемному ультразвуковому хирургическому волноводу-инструменту, усилитель сигнала, элемент для инициирования начала и окончания работы ультразвукового хирургического волновода-инструмента и средство подачи жидкой среды с приводом, (см. описание изобретения RU №2240073 «Способ управления процессом ультразвуковой липосакции», МПК А61В 18/00, А61В 17/32, опубл. 20.11.2004).
Запоминающее устройство хранит программу, которая, при ее исполнении процессором, побуждает процессор осуществлять, по меньшей мере, два режима функционирования в ходе операции.
Недостатками известного устройства являются:
Частота механического резонанса пьезоэлектрических акустических узлов со сменными хирургическими инструментами - волноводами, подключаемых к генератору не может отличаться на величину, при которой согласующий LC фильтр обеспечивает (без изменения параметров элементов его составляющих) функцию выделения синусоидального сигнала, соответствующего первой гармонической составляющей сигнала прямоугольной формы поступающего выхода инвертора.
Частота механического резонанса пьезоэлектрических акустических узлов со сменными ультразвуковыми хирургическими инструментами-волноводами, подключаемых к генератору не может отличаться на величину превышающую ширину полосы захвата схемы ФАПЧ.
Значение емкостной составляющей импеданса пьезоэлектрических акустических узлов, подключаемых к генератору не может отличаться от значения емкости конденсатора, которая определяет емкостную реактивную составляющую тока, протекающего через преобразователь колебательной системы, на величину, при которой при предельных изменениях акустической нагрузки разность фаз тока в цепи СΔ и тока протекающего через пьезоэлектрический акустический узел превысит ширину полосы захвата схемы ФАПЧ.
Выполнение условия равенства фазы тока протекающего через АУВИ и фазы тока реактивной емкостной составляющей - СΔ не может быть выполнено с точностью необходимой для эффективной работы АУВИ. Во время работы АУВИ происходит нагрев элементов его составляющих. Это приводит к изменению значения электрической емкости пьезокерамических элементов, что в свою очередь приводит к изменению фазы тока протекающего через пьезоэлектрический акустический узел.
При этом фаза тока реактивной емкостной составляющей СΔ остается постоянной и отличается от фазы тока реактивной емкостной составляющей АУВИ. Как следствие на выходе схемы ФАПЧ формируется сигнал рассогласования, который ведет к изменению частоты колебаний задающего генератора ГУН 2. Это изменение приводит к тому, что частота выходного сигнала генератора начинает отличаться от частоты механического резонанса пьезоэлектрического акустического узла. Это приводит к снижению амплитуды колебаний рабочей части АУВИ, что в известном генераторе компенсируется увеличением амплитуды выходного сигнала, что приводит к увеличению нагрева элементов составляющих акустический узел
Технической задачей и результатом предлагаемого изобретения является расширение функциональных возможностей устройства за счет обеспечения возможности одновременного подключения различных акустических узлов для проведения нескольких хирургических операций, а также обеспечение возможности повышения точности поддержания равенства частоты и фазы выходного сигнала генератора частоте и фазе механических колебаний механического резонанса АУВИ с целью повышения эффективности их работы.
Технический результат достигается тем, что устройство для проведения хирургических операций с применением ультразвуковых колебаний содержит микропроцессорный блок управления, генератор ультразвукового сигнала, обеспечивающий подачу сигнала через акустический узел - ультразвуковой пьезоэлектрический преобразователь на съемный ультразвуковой хирургический волновод-инструмент, и обеспечивающий возможность сравнения амплитуды тока посредством схемы сравнения с амплитудой тока, задаваемой с блока управления, и корректировки амплитуды электрического напряжения и частоты, прикладываемых к съемному ультразвуковому хирургическому волноводу-инструменту, усилитель сигнала, элемент для инициирования начала и окончания работы ультразвукового хирургического волновода-инструмента и средство подачи жидкой среды с приводом, при этом оно дополнительно содержит модуль отображения информации, интерфейсный модуль с возможностью внесения изменений в режимы работы генератора и акустических узлов - ультразвуковых пьезоэлектрических преобразователей, блок формирования питающих напряжений широкополосного усилителя синусоидального сигнала, с возможностью изменения выходных напряжений под действием управляющих сигналов, поступающих с микропроцессорного блока управления согласно алгоритму, коммутатор с возможностью подключения пьезокерамических ультразвуковых преобразователей к выходу широкополосного усилителя синусоидального сигнала через блок формирования сигналов обратной связи, коммутатор запоминающих устройств, конструктивно интегрированных в акустические узлы с возможностью подключения к микропроцессорному блоку управления, блок выходных разъемов генератора с возможностью одновременного подключения различных акустических узлов, аналого-цифровой преобразователь, обеспечивающий согласование аналогового сигнала со второго выхода блока формирования сигналов обратной связи с цифровым входом микропроцессорного блока, управляемый аттенюатор, обеспечивающий изменение амплитуды выходного сигнала генератора, под действием управляющих сигналов микропроцессорного блока согласно алгоритму и цифровой синтезатор сигнала синусоидальной формы с функцией управления выходной частотой с помощью цифрового кода и напряжения и функцией управления фазой выходного сигнала с помощью цифрового кода согласно алгоритму. Модуль отображения информации вынесен на внешнюю поверхность корпуса устройства. Съемный ультразвуковой хирургический волновод-инструмент выполнен в виде иглы с каналом для введения жидкой среды или в виде - торцевого излучателя или в виде скальпеля или в виде диссектора.
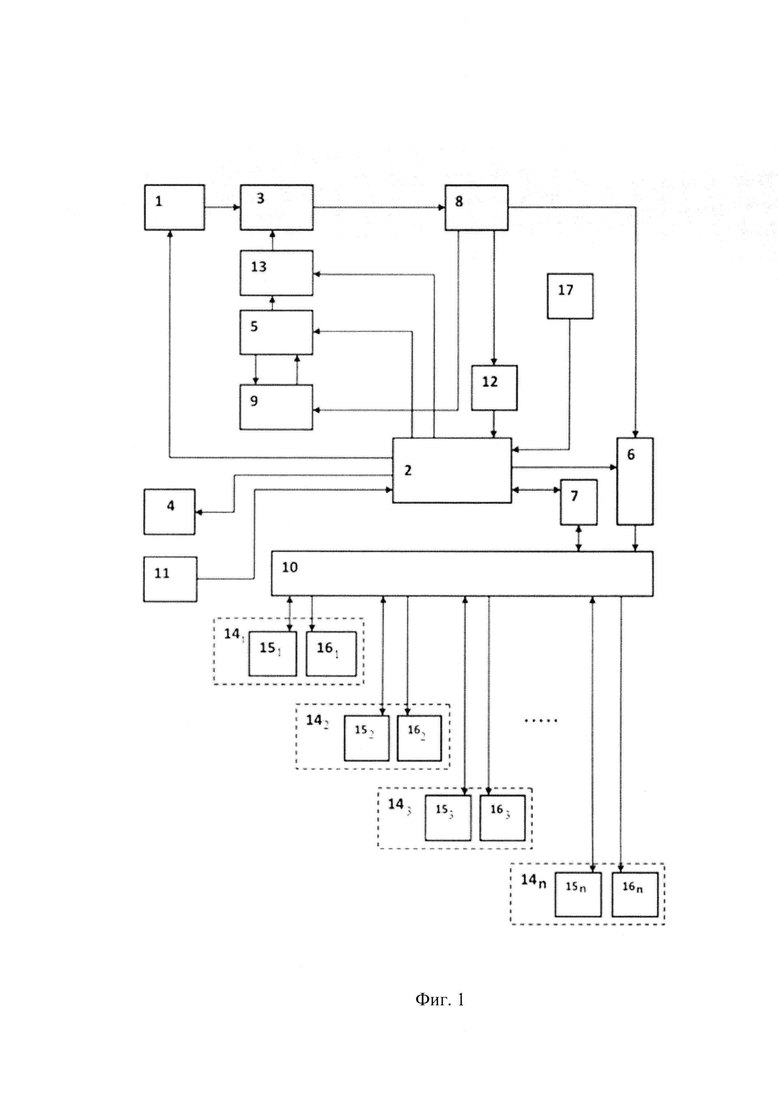
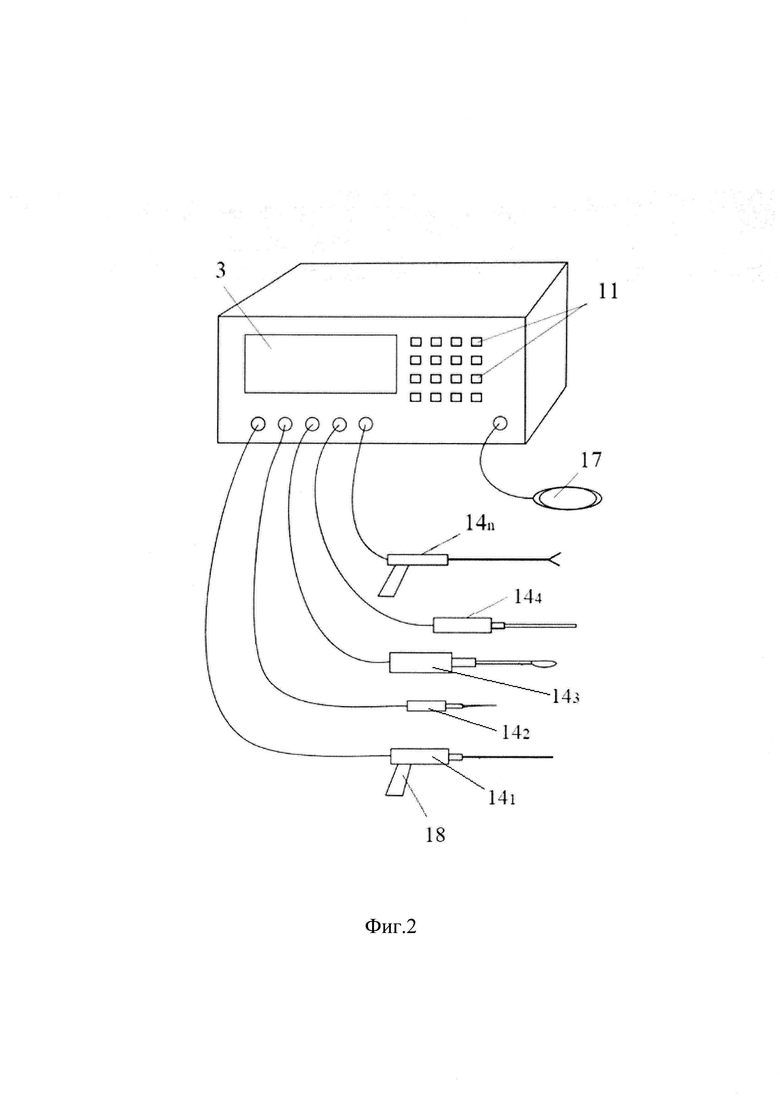
На фиг. 1 представлена блок-схема генератора устройства; на фиг. 2 изображен общий вид устройства, с присоединенными АУВИ: иглой с каналом для введения склерозанта, скальпелем и скальпелем, торцевой излучателем и диссектором.
Устройство для проведения хирургических операций с применением ультразвуковых колебаний содержит широкополосный генератор, включающий блок 1 формирования питающих напряжений (БФПН), выходные напряжения которого изменяются под действием управляющих сигналов, поступающих с микропроцессорного блока управления 2, широкополосный усилитель 3 синусоидального сигнала, модуль 4 отображения информации, цифровой синтезатор 5 сигнала синусоидальной формы (ЦСССФ) с функцией управления выходной частотой с помощью цифрового кода и напряжения и функцией управления фазой выходного сигнала с помощью цифрового кода, коммутатор 6 выходного сигнала широкополосного усилителя 3, коммутатор 7, блок 8 формирования сигналов обратной связи (БФСОС) - сигнала пропорционального амплитуде тока в цепи АУВИ и сигнала, фаза и частота которого совпадает с фазой и частотой тока в цепи АУВИ, фазовый компаратор 9 (составляющая схемы-ФАПЧ), блок 10 выходных разъемов, интерфейсный модуль 11, предназначенный для внесения оператором изменений в режимы работы генератора, блок аналого-цифрового преобразователя 12 (АЦП), управляемый аттенюатор 13, несколько АУВИ 141, 142, …14n, в состав которых входят запоминающие устройства 151, 152…15n, соответственно, предназначенные для запоминания электрических и физических параметров АУВИ и пьезокерамические ультразвуковые преобразователи 161, 162, …16n, соответственно, имеющие различные частоты механического резонанса и различные значения электрической емкости и элемент 17, предназначенный для инициирования начала и окончания работы АУВИ, выполненный в виде напольной педали или кнопки. Кнопка может быть расположена, в том числе и в АУВИ (кнопка на чертеже не показана).
Коммутатор 7 предназначен для подключения запоминающих устройств 151, 152…15 конструктивно интегрированных в акустические узлы 141, 142, …14n к микропроцессорному блоку 2 управления.
Коммутатор 6 предназначен для подключения пьезокерамических ультразвуковых преобразователей 161, 162, …16n к выходу широкополосного усилителя 3 синусоидального сигнала через БФСОС.
Устройство 18 подачи жидкой фазы с ручным приводом установлено на АУВИ 141.
АУВИ 141, 142, …14n отличаются геометрией и размерами и, как следствие, имеют различные частоты механического резонанса и различные значения электрической емкости характерной для пьезокерамических колебательных систем и могут иметь любые значения в пределах всего диапазона частот выходных сигналов генератора.
На фиг. 2 общего вида устройства, в качестве примера, изображены:
- игла с каналом для введения склерозанта, с частотой механических колебаний - 30 кГц и электрической емкостью ультразвуковой колебательной системы - 3,4 нФ (см. п. 141);
- скальпель с частотой механических колебаний - 44 кГц и электрической емкостью ультразвуковой колебательной системы - 3.4 нФ (см. п. 142);
- скальпель с частотой механических колебаний - 25 кГц и электрической емкостью ультразвуковой колебательной системы - 6 нФ (см. п. 143);
- торцевой излучатель, с частотой механических колебаний - 44 кГц и электрической емкостью ультразвуковой колебательной системы - 3,4 нФ (см. п. 144);
- диссектор с частотой механических колебаний - 56 кГц и электрической емкостью ультразвуковой колебательной системы -1.7 нФ (см. п. 14n).
В случае практической реализации генератора, например, с диапазоном частот выходных сигналов 20…100 кГц и количеством разъемов для подключения АУВИ равным 10, к генератору могут быть одновременно подключены АУВИ с такими частотами механического резонанса, например, 20 кГц, 22 кГц, 25 кГц, 33 кГц, 44 кГц, 48 кГц, 52 кГц, 56 кГц, 72 кГц, 90 кГц. Электрическая емкость подключенных АУВИ может отличаться в значительной степени (например: 0.6 нФ, 1.7 нФ, 3.4 нФ, 6 нФ, 10 нФ) и может быть любой, и ограничена только максимальной мощностью выходного сигнала генератора.
Модуль отображения информации 4 и интерфейсный модуль 11, предназначенный для внесения оператором изменений в режимы работы генератора, вынесены на наружную поверхность корпуса генератора.
Предлагаемый генератор позволяет: автоматически обнаруживать резонансные частоты и определять электрическую емкость, подключенных АУВИ, записывать (считывать) электрические и физические параметры АУВИ в запоминающем устройстве, конструктивно интегрированном в акустический узел, а также записывать (считывать) эксплуатационные параметры АУВИ (дату изготовления, время наработки, рекомендуемые и предельные значения режимов эксплуатации) в запоминающем устройстве, конструктивно интегрированном в акустический узел. Кроме того предлагаемое устройство позволяет отображать режимы работы генератора и АУВИ и изменять режимы работы генератора и АУВИ.
Устройство для проведения хирургических операций с применением ультразвуковых колебаний работает следующим образом.
При включении генератора, микропроцессорный блок 2 управления формирует сигналы управления для коммутатора 7, который через блок 10 выходных разъемов опрашивает запоминающие устройства 15, конструктивно интегрированные в подключенные к генератору АУВИ, и считывает из запоминающих устройств 15 информацию (электрические и физические параметры) необходимую для работы каждого из подключенных АУВИ.
В случае обнаружения запоминающего устройства 15, конструктивно интегрированного в акустический узел 14, не содержащего необходимой для работы информации (электрические и физические параметры) АУВИ, микропроцессорный блок 2 управления формирует сигналы для модуля отображения информации 4. При необходимости дальнейшей работы с этим акустическим узлом 14, оператор посредством интерфейсного модуля 11 запускает процедуру интеграции (определение необходимых для работы электрических и физических параметров) данного акустического узла 14.
Процедура интеграции акустического узла 14 состоит в следующем.
Микропроцессорный блок 2 управления посредством коммутатора 6 и блока 10 выходных разъемов генератора подключает пьезокерамический ультразвуковой преобразователь 16, входящий в состав акустического узла 14, к выходу широкополосного усилителя 3 синусоидального сигнала через БФСОС 8 и, по определенному алгоритму, используя ЦСССФ 5, управляемый аттенюатор 13, БФПН 1, используя выходные сигналы БФСОС 8 определяет электрическую емкость пьезокерамического ультразвукового преобразователя 16 и записывает ее значение в запоминающее устройство 15, конструктивно интегрированное в акустический узел 14. После этого микропроцессорный блок 2 управления формирует сигналы управления для БФПН 1 и управляемого аттенюатора 13 и передает в ЦСССФ 5 цифровой код, пропорциональный фазе емкостной реактивной составляющей тока (ПФЕРСТ), протекающего через пьезоэлектрический преобразователь колебательной системы 16. Цифровой код ПФЕРСТ является результатом математических вычислений согласно определенному алгоритму. Входными данными для этих вычислений являются значение частоты сигнала подводимого к пьезоэлектрической ультразвуковой колебательной системе 16, входящей в акустический узел 14 и ранее измеренное значение электрической емкости пьезокерамического ультразвукового преобразователя 16, входящего в состав акустического узла 14. Изменяя частоту выходного сигнала и значение цифрового кода ПФЕРСТ, микропроцессорный блок 2 управления производит частотное сканирование в диапазоне частот определенных в технических характеристиках генератора. Во время частотного сканирования микропроцессорный блок 2 управления по определенному алгоритму анализирует параметры сигнала поступающего с БФСОС 8 посредством аналого-цифрового преобразователя 12 и определяет значения всех механических резонансов системы, обнаруженных в диапазоне частот, определенных в технических характеристиках генератора. Информацию обо всех обнаруженных механических резонансах микропроцессорный блок 2 управления передает в модуль 4 отображения информации. Оператор, используя интерфейсный модуль 11, производит выбор значения частоты механического резонанса системы, при котором присоединенный АУВИ выполняет определенную для него функцию хирургического инструмента, и инициирует процедуру записи в запоминающее устройство 15 (входящие в акустический узел 14) значения частоты механического резонанса системы.
На этом процесс интеграции акустического узла 14-заканчивается. Процесс интеграции акустического узла 14 происходит один раз - при его первом подключении к генератору.
В случае, если микропроцессорный блок 2 управления обнаружит следующий не идентифицированный акустический узел 14, (к устройству может быть впервые подключено несколько акустических узлов), процедура интеграции повторится.
После того как не останется ни одного не идентифицированного акустического узла 14 на экране модуля 4 отображения информации появится информация обо всех доступных для работы акустических узлах 141, 142, …14n. С этого момента оператор может выбрать любой из них для применения.
Параметры каждого АУВИ, записанные в запоминающее устройство 15, сохраняются и при отключении генератора от источника электропитания и при отсоединении акустического узла 14 от генератора.
В рабочем режиме после выбора оператором_ с помощью интерфейсного модуля 11 и модуля 4 отображения информации необходимого акустического узла 14 (из числа подключенных к блоку 10 выходных разъемов), микропроцессорный блок 2 управления формирует сигналы управления для коммутатора 7 и через блок 10 выходных разъемов генератора считывает из запоминающего устройства 15, конструктивно интегрированного в акустический узел 14 параметры АУВИ (электрические и физические) необходимые для работы выбранного акустического узла 14. Далее микропроцессорный блок 2 управления посредством коммутатора 6 выходного сигнала и блока 10 выходных разъемов генератора подключает выбранный пьезокерамический ультразвуковой преобразователь 16 к широкополосному усилителю 3 через БФСОС 8. Микропроцессорный блок 2 управления (согласно заложенного алгоритма) формирует сигналы управления для БФПН 1, ЦСССФ 5 и управляемого аттенюатора 13 на основании информации, считанной из запоминающего устройства 15 (значение частоты механического резонанса, значение электрической емкости пьезокерамического ультразвукового преобразователя 16, значения номинального и максимального тока в цепи ультразвуковой колебательной системы с присоединенным АУВИ, значение определяющее ресурс ультразвуковой колебательной системы). Микропроцессорный блок 2 управления отправляет в ЦСССФ 5 код частоты механического резонанса, считанный из запоминающего устройства 15 и код фазовой коррекции ПФЕРСТ который вычисляется в микропроцессорном блоке 2 управления согласно алгоритму.
Микропроцессорный блок 2 управления отправляет в управляемый аттенюатор 13 код значения уровня выходного сигнала (для оператора это - значение уровня мощности АУВИ, который он устанавливает с помощью интерфейсного модуля 11 и модуля отображения информации 4). С этого момента система находится в режиме ожидания. После воздействия на элемент 17, инициирующий начало работы АУВИ, микропроцессорный блок 4 управления формирует сигналы управления для БФПН 1 и на пьезокерамический ультразвуковой преобразователь 16, входящий в состав акустического узла 14, подается сигнал синусоидальной формы заданной частоты и фазы.
Мгновенные значения частоты и фазы выходного сигнала корректируются с помощью фазового компаратора 9, на один вход которого поступает сигнал с ЦСССФ 5, а на другой вход - сигнал с БФСОС 8. Аналоговый выходной сигнал фазового компаратора 9 поступает на вход аналогового управления выходной частотой ЦСССФ 5.
Для учета температурных изменений электрической емкости пьезокерамического ультразвукового преобразователя 16 (входящего в состав акустического узла 14) во время работы и корректировки фазы сигнала ПФЕРСТ, протекающего через пьезоэлектрический преобразователь 16, микропроцессорный блок управления 2 по определенному алгоритму, с периодичностью, обусловленной особенностями находящегося в работе АУВИ, измеряет электрическую емкость пьезокерамического ультразвукового преобразователя 16, вычисляет значение фазовой коррекции ПФЕРСТ и записывает код фазовой коррекции ПФЕРСТ в ЦСССФ 5.
Амплитуда тока в цепи и, как следствие, амплитуда рабочего окончания присоединенного АУВИ измеряется на основании сигнала со второго выхода БФСОС 8 посредством блока 12 аналого-цифрового преобразователя. В случае отклонения измеренных значений от установленных оператором или считанных из запоминающего устройства 15, входящего в состав акустического узла 14, микропроцессорный блок 2 управления (согласно заложенного алгоритма) формирует управляющие сигналы для управляемого аттенюатора 13 и БФПН 1, в результате которых происходит корректировка амплитуды тока в цепи, и, как следствие, амплитуды колебаний рабочего окончания присоединенного АУВИ.
Клинический пример 1
Больной Н., 39 лет, 02.07.2020 года обратился с жалобами на выделение крови при дефекации, выпадение узлов, которые не вправляются самостоятельно, болевой синдром, сохраняющийся в течение 1-2 часов после дефекации. Был произведен осмотр больного.
DS: Комбинированный внутренний геморрой 3 ст. Хроническая анальная трещина на 6 часах. 02.07.2020 года под местной анестезией было выполнено комбинированное вмешательство. Воздействием на элемент, инициирующий начало работы АУВИ, с помощью ультразвукового скальпеля с частотой механических колебаний - 44 кГц и электрической емкостью ультразвуковой колебательной системы -3.4 нФ выполнено иссечение анальной трещины на 6 часах двумя дугообразными разрезами по Габриелю. Затем выполнена кавитационная склеротерапия с помощью иглы с каналом для введения склерозанта, с частотой механических колебаний - 30 кГц и электрической емкостью ультразвуковой колебательной системы - 3,4 нФ и раствора Этоксисклерола 1%-4,0 внутренних геморроидальных узлов на 3 и 7 часах. После прошивания сосудистой ножки Z-образным швом нитью Vicryl 0, с помощью ультразвукового диссектора с частотой механических колебаний - 56 кГц и электрической емкостью ультразвуковой колебательной системы - 1.7 нФ была выполнена открытая геморроидэктомия узла на 11 часах. Пациент выписан в удовлетворительном состоянии на амбулаторное лечение в день операции. Период полной эпителизации ран на 6 и 11 часах составил 28 дней. Стриктуры анального канала не отмечено. Симптомы полностью купированы.
Клинический пример 2
Больной Ф., 40 лет, 07.09.2020 года обратился с жалобами на болезненную припухлость в области анального отверстия, сохраняющуюся в течение 3 суток, повышение температуры тела до 38С.Был произведен осмотр больного.
DS: Острый подкожный парапроктит. 07.09.2020 года воздействием на элемент, инициирующий начало работы АУВИ, под местной анестезией в экстренном порядке с помощью ультразвукового скальпеля с частотой механических колебаний - 25 кГц и электрической емкостью ультразвуковой колебательной системы - 6 нФ было выполнено вскрытие гнойника радиальным разрезом кожи длиной 2,0 см. Полость гнойника до 3,0 см в глубину промыта раствором Октенисепта с комбинированной обработкой ультразвуковой торцевым излучателем. Антибактериальная терапия не назначалась, пациент проходил лечение амбулаторно. 08.09.2020 года на перевязке отмечена значительная положительная динамика, отсутствие отделяемого из послеоперационной раны, уменьшение инфильтрации мягких тканей перианальной области. 09.09.2020 на 2е сутки послеоперационного периода пациенту выполнена ректороманоскопия. Патологии прямой кишки и сигмовидной кишки не выявлено. В анальном канале на 9 часах в области зубчатой линии отмечен измененный анальный синус с широким устьем, рубцовым краем входа и ходом, идущим интрасфинктерно и связанным с полостью ранее вскрытого гнойника. В связи с положительной динамикой лечения острого процесса, отсутствием инфильтрации тканей принято решение о проведении радикального лечения. Под местной анестезией после проведения зонда в свищевой ход выполнено иссечение интрасфинктерного свищевого хода двумя дугообразными разрезами с помощью ультразвукового скальпеля с частотой механических колебаний - 25 кГц и электрической емкостью ультразвуковой колебательной системы - 6 нФ. Послеоперационный период протекал гладко. Полная эпителизация отмечена на 30-е сутки.
Больная О., 38 лет, 02.07.2020 года обратилась с жалобами на затруднения при дефекации, боли, необходимость ручного пособия, чувство неполного опорожнения кишечника. Был произведен осмотр больной.
DS: Недостаточность мышц тазового дна. Ректоцеле II степени. Синдром обструктивной дефекации. 06.04.2020 года была произведена передняя сфинктеролеваторопластика с помощью одного шва П-образной модификации с переменным направлением. Воздействием на элемент, инициирующий начало работы АУВИ, с помощью ультразвукового скальпеля с частотой механических колебаний - 25 кГц и электрической емкостью ультразвуковой колебательной системы - 6 нФ выполнено иссечение треугольного лоскута задней стенки влагалища с основанием на переходной складке и вершиной в верхней трети задней стенки влагалища; ультразвуковым скальпелем с частотой механических колебаний - 44 кГц и электрической емкостью ультразвуковой колебательной системы - 3.4 нФ рассечена фасция Денонвилье по боковым стенкам треугольного доступа. При использовании ультравукового скальпеля не возникла необходимость использования диатермокоагуляции. Затем был наложен П-образный шов переменного направления, при затягивании которого было сформировано новое тело промежности. Наложены отдельные узловые швы на слизистую влагалища. Послеоперационный период протекал гладко. На 3е сутки пациентка выписана на амбулаторное лечение. Через 14 дней сняты швы со слизистой влагалища - заживление первичным натяжением, отмечена удовлетворительная функция сфинктера и леваторов заднего прохода. Отмечается улучшение эвакуаторной функции прямой кишки, подтвержденное опросником Векснера. Симптомы купированы.
| название | год | авторы | номер документа |
|---|---|---|---|
| НЕЙРОХИРУРГИЧЕСКОЕ УЛЬТРАЗВУКОВОЕ УСТРОЙСТВО | 2000 |
|
RU2201169C2 |
| СПОСОБ УПРАВЛЕНИЯ ПРОЦЕССОМ УЛЬТРАЗВУКОВОЙ ЛИПОСАКЦИИ | 2003 |
|
RU2240073C1 |
| СПОСОБ УПРАВЛЕНИЯ ПРОЦЕССОМ ВНЕШНЕЙ УЛЬТРАЗВУКОВОЙ ЛИПОСАКЦИИ | 2010 |
|
RU2440165C1 |
| Способ ультразвуковой обработки и установка для его осуществления | 2016 |
|
RU2625465C1 |
| УСТРОЙСТВО ДЛЯ УЛЬТРАЗВУКОВОГО РАСПЫЛЕНИЯ ОДОРАНТА | 2023 |
|
RU2814733C1 |
| УЛЬТРАЗВУКОВАЯ КОЛЕБАТЕЛЬНАЯ СИСТЕМА (ВАРИАНТЫ) | 2018 |
|
RU2672530C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ПАРАМЕТРОВ ВИБРАЦИИ НАКОНЕЧНИКА УЛЬТРАЗВУКОВОГО ВОЛНОВОДА | 2015 |
|
RU2593444C1 |
| УЛЬТРАЗВУКОВОЙ ХИРУРГИЧЕСКИЙ АППАРАТ | 2003 |
|
RU2255685C2 |
| УСТРОЙСТВО ЭЛЕКТРОСТАТИЧЕСКОГО УЛЬТРАЗВУКОВОГО РАСПЫЛЕНИЯ | 2024 |
|
RU2831473C1 |
| УЛЬТРАЗВУКОВАЯ КОЛЕБАТЕЛЬНАЯ СИСТЕМА ДЛЯ ПЛАСТИЧЕСКОЙ ХИРУРГИИ | 2002 |
|
RU2239383C2 |
Изобретение относится к медицине, а именно к устройству для проведения хирургических операций с применением ультразвуковых колебаний. Устройство содержит микропроцессорный блок управления, генератор ультразвукового сигнала, обеспечивающий подачу сигнала через акустический узел - ультразвуковой пьезоэлектрический преобразователь на съемный ультразвуковой хирургический волновод-инструмент, усилитель сигнала, элемент для инициирования начала и окончания работы волновода-инструмента и средство подачи жидкой среды с приводом. Также оно содержит модуль отображения информации, интерфейсный модуль, блок формирования питающих напряжений широкополосного усилителя синусоидального сигнала, коммутатор запоминающих устройств, блок выходных разъемов генератора, аналого-цифровой преобразователь, управляемый аттенюатор и цифровой синтезатор сигнала синусоидальной формы. Достигается расширение функциональных возможностей устройства за счет обеспечения возможности одновременного подключения различных акустических узлов для проведения нескольких хирургических операций, а также обеспечение возможности повышения точности поддержания равенства частоты и фазы выходного сигнала генератора частоте и фазе механических колебаний механического резонанса АУВИ с целью повышения эффективности их работы. 5 з.п. ф-лы, 2 ил.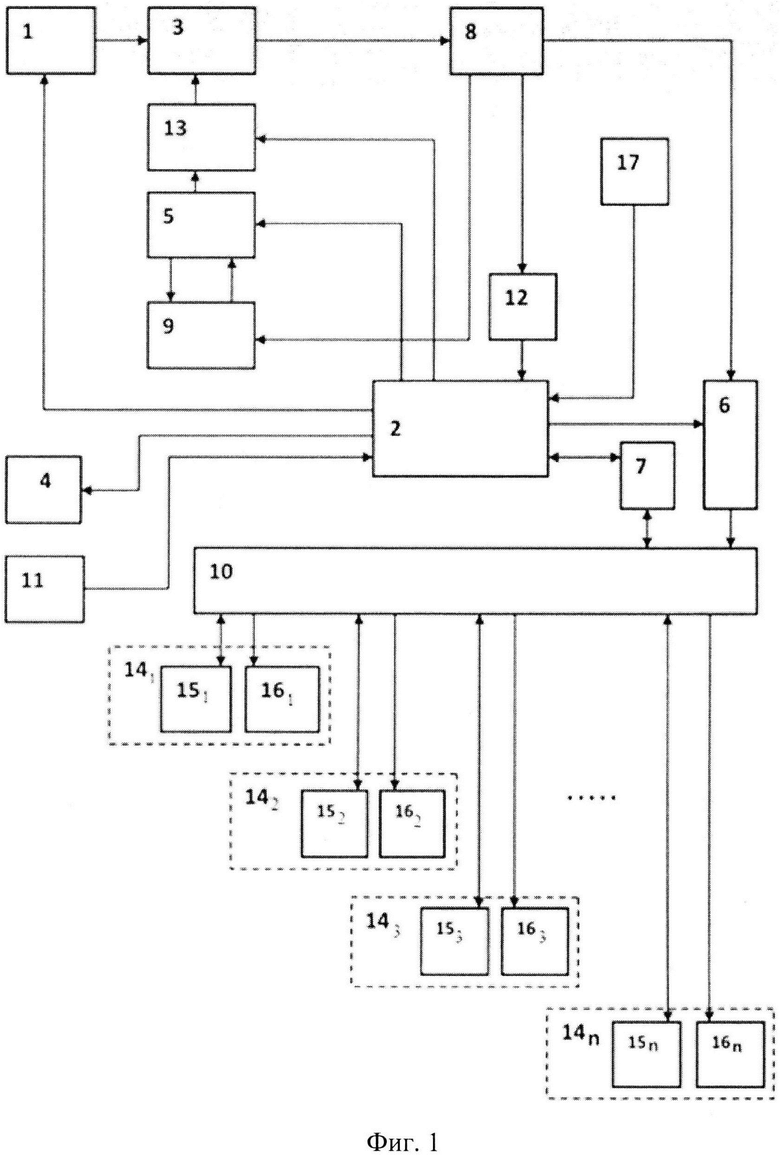
1. Устройство для проведения хирургических операций с применением ультразвуковых колебаний, содержащее микропроцессорный блок управления, генератор ультразвукового сигнала, обеспечивающий подачу сигнала через акустический узел - ультразвуковой пьезоэлектрический преобразователь на съемный ультразвуковой хирургический волновод-инструмент и обеспечивающий возможность сравнения амплитуды тока посредством схемы сравнения с амплитудой тока, задаваемой с блока управления, и корректировки амплитуды электрического напряжения и частоты, прикладываемых к съемному ультразвуковому хирургическому волноводу-инструменту, усилитель сигнала, элемент для инициирования начала и окончания работы ультразвукового хирургического волновода-инструмента и средство подачи жидкой среды с приводом, отличающееся тем, что оно дополнительно содержит модуль отображения информации, интерфейсный модуль с возможностью внесения изменений в режимы работы генератора и акустических узлов - ультразвуковых пьезоэлектрических преобразователей, блок формирования питающих напряжений широкополосного усилителя синусоидального сигнала с возможностью изменения выходных напряжений под действием управляющих сигналов, поступающих с микропроцессорного блока управления согласно алгоритму, коммутатор с возможностью подключения пьезокерамических ультразвуковых преобразователей к выходу широкополосного усилителя синусоидального сигнала через блок формирования сигналов обратной связи, коммутатор запоминающих устройств, конструктивно интегрированных в акустические узлы с возможностью подключения к микропроцессорному блоку управления, блок выходных разъемов генератора с возможностью одновременного подключения различных акустических узлов, аналого-цифровой преобразователь, обеспечивающий согласование аналогового сигнала со второго выхода блока формирования сигналов обратной связи с цифровым входом микропроцессорного блока, управляемый аттенюатор, обеспечивающий изменение амплитуды выходного сигнала генератора под действием управляющих сигналов микропроцессорного блока согласно алгоритму, и цифровой синтезатор сигнала синусоидальной формы с функцией управления выходной частотой с помощью цифрового кода и напряжения и функцией управления фазой выходного сигнала с помощью цифрового кода согласно алгоритму.
2. Устройство для проведения хирургических операций с применением ультразвуковых колебаний по п. 1, отличающееся тем, что модуль отображения информации вынесен на внешнюю поверхность корпуса устройства.
3. Устройство для проведения хирургических операций с применением ультразвуковых колебаний по п. 1, отличающееся тем, что съемный ультразвуковой хирургический волновод-инструмент выполнен в виде иглы с каналом для введения жидкой среды.
4. Устройство для проведения хирургических операций с применением ультразвуковых колебаний по п. 1, отличающееся тем, что съемный ультразвуковой хирургический волновод-инструмент выполнен в виде торцевого излучателя.
5. Устройство для проведения хирургических операций с применением ультразвуковых колебаний по п. 1, отличающееся тем, что съемный ультразвуковой хирургический волновод-инструмент выполнен в виде скальпеля.
6. Устройство для проведения хирургических операций с применением ультразвуковых колебаний по п. 1, отличающееся тем, что съемный ультразвуковой хирургический волновод-инструмент выполнен в виде диссектора.
| ЭЛЕКТРОХИРУРГИЧЕСКИЕ СИСТЕМЫ И СПОСОБЫ | 2013 |
|
RU2657960C2 |
| СПОСОБ, СИСТЕМА И ИНСТРУМЕНТ ДЛЯ УЛЬТРАЗВУКОВОГО ВОЗДЕЙСТВИЯ НА КРОВЕНОСНЫЙ СОСУД ИЛИ КАВЕРНОЗНОЕ ТЕЛО | 2001 |
|
RU2214193C2 |
| WO 1994021183 A1, 29.09.1994 | |||
| СПОСОБ УПРАВЛЕНИЯ ПРОЦЕССОМ УЛЬТРАЗВУКОВОЙ ЛИПОСАКЦИИ | 2003 |
|
RU2240073C1 |
| СПОСОБ ЭКСТРАКЦИИ ПИГМЕНТОВ ИЗ КЛЕТОК МИКРОВОДОРОСЛИ TETRASELMIS VIRIDIS | 2021 |
|
RU2773709C1 |

