Изобретение относится к области управления системами генерирования электрической энергии переменного тока и может быть использовано для управления устройствами, преобразующими постоянное и многофазное переменное напряжение в переменное трехфазное.
Известен способ раздельного управления преобразователем (описанный в книге Л. Джюджи, Б. Пелли "Силовые полупроводниковые преобразователи частоты"), при котором управление преобразователем производится формированием необходимого сигнала регулирования с использованием раздельного управления по каждой фазе. Однако указанный способ предполагает выполнение большого количества функциональных операций, что в свою очередь приводит к потере точности управления.
Кроме того, известен способ (описанный в статье Г.В. Грабовецкий, С.А. Харитонов, В. Ф. Лучкин, и др. "Исследование влияния структур и параметров регуляторов на амплитудную модуляцию выходного напряжения системы электропитания с НПЧ" - Силовые преобразователи электрической энергии: Межвуз. сб. науч. трудов/ Новосиб. электротех ин-т - Новосибирск, 1989 - С. 3-19), являющийся прототипом предлагаемого изобретения и заключающийся в многоконтурном управления преобразователем с раздельным управлением фазами, что позволяет с большей точностью отслеживать возмущения, возникающие в процессе работы преобразователя. В прототипе сигналы управления вырабатывают сравнением фазных напряжений преобразователя с эталонными сигналами, вырабатываемыми системой регулирования, после чего полученные сигналы управления поступают в блоки регулирования каждой из фаз, а после регулирования полученные сигналы управления используют для управления силовыми ключами преобразователя.
Однако в указанном способе, как и предыдущем, большое количество функциональных преобразований приводит к ухудшению точности управления, кроме того, реализуемое в этом способе раздельное управление фазами преобразователя не допускает совместного регулирования фаз преобразователя, что приводит к увеличению времени переходных процессов в системе.
Задачей предлагаемого изобретения является создание способа управления, имеющего меньшее количество функциональных преобразований, вследствие чего увеличивается точность управления, и позволяющего уменьшить время переходных процессов в системе за счет одновременного регулирования напряжения во всех фазах преобразователя.
Это достигается тем, что в известном способе, заключающемся в том, сигналы управления вырабатывают сравнением фазных напряжений преобразователя с эталонными сигналами, вырабатываемыми системой регулирования, полученные сигналы управления подают в блоки регулирования, а полученные после регулирования сигналы управления используют в качестве модулирующих сигналов преобразователя, управляющего силовыми ключами,
перед выполнением операции сравнения фазные напряжения преобразовывают из трехфазной системы координат в систему α,β- координат с выделением нулевой последовательности, сравнение и регулирование производят с сигналами в системе α,β- координат и нулевой последовательности, полученные сигналы регулирования обратно преобразовывают в трехфазную систему координат и на их основе формируют управляющие сигналы для силовых ключей преобразователя.
На чертеже приведена одна из возможных структурных схем, реализующих предложенный способ управления.
Структурная схема, приведенная на чертеже, представляет собой микропроцессорную систему управления инвертором, в котором блоки 4-12 реализованы программно.
Схема содержит:
Датчики (Д) напряжений фаз А, В, C (блоки 1-3), которые предназначены для передачи информации о напряжении нагрузки каждой из фаз в систему управления и представляют собой типичные резистивные датчики напряжения.
Схему выделения нулевой последовательности (блок 4). Это программный блок, выделяющий нулевую составляющую из фазных напряжений, которая возникает из-за "перекоса" фазных напряжений преобразователя (см. Трещеев "Электромеханические процессы в машинах переменного тока"). Эта схема реализована программно. Выделение нулевой последовательности происходит в два этапа: сначала находится нулевая последовательность, а затем ее значение вычитается из фазных напряжений.
Схему прямого преобразования координат (блок 5). Задачай этой схемы - преобразование фазных напряжений преобразователя из трехфазной системы координат А, В, С в систему α,β- координат (см. Трещеев "Электромеханические процессы в машинах переменного тока"). Схема реализована в виде программного блока.
Блоки эталонных напряжении (блоки 6-8), которые необходимы при управлении преобразователем. Для приведенной схемы Uzo=0, Uza=Umcoswt, Uzb=(-Um)sinwt.
Регуляторы (блоки 9-11). Регуляторы (см. Бесекерский В.А., Попов Е.П. "Теория систем автоматического управления") в данной схеме предназначены для регулирования разностных сигналов, полученных при сравнении, в зависимости от задачи преобразователя они могут представлять собой как обыкновенные пропорциональные регуляторы (Kα,Kβ,K0), так и более сложные интегродифференциальные звенья.
Схему обратного преобразования координат (блок 11). Задачей этой схемы является преобразование полученных сигналов регулирования из системы α,β- координат в трехфазную систему А, В, C координат с учетом сигнала регулирования нулевой последовательности (см. Трещеев "Электромеханические процессы в машинах переменного тока"). Схема реализована в виде программного блока.
ШИМ - преобразователь (блок 13). Это стандартный широтно-импульсный преобразователь с опорным пилообразным напряжением, который преобразует сигналы регулирования в импульсы управления силовыми ключами преобразователя.
Способ осуществляется следующим образом: на вход системы управления подаются напряжения фаз А, В, C из них выделяется нулевая последовательность, после чего они преобразовываются из трехфазной системы координат в систему α,β- координат.
Полученные, после преобразования координат, напряжения Uβ,Uα, a также напряжение нулевой последовательности U0 сравниваются с эталонными напряжениями, и полученные сигналы ошибки поступают на входы соответствующих регуляторов. Прошедшие регулирование сигналы ошибки каналов α,β преобразовывают в трехфазную систему координат с включением в них, прошедшего регулирование, сигнала ошибки нулевой последовательности, после чего они передаются в ШИМ-модулятор, который формирует сигналы управления силовыми элементами преобразователя.
При работе в системе α,β- координат качество выходного напряжения оценивается одновременно во всех трех фазах, всего по двум параметрам Uβ и Uα, в отличие от традиционных систем, в которых каждая фаза имеет свой собственный канал регулирования, тем самым уменьшается количество функциональных преобразований необходимых для выработки сигналов управления преобразователя, это свойство позволяет увеличить точность управления преобразователем.
Одновременное регулирование выходного напряжения во всех трех фазах, реализуемое при векторном управлении, позволяет избежать несогласованного регулирования каждой из фаз и соответственно в некоторых случаях значительно уменьшить время переходных процессов в системе.
| название | год | авторы | номер документа |
|---|---|---|---|
| ВЕКТОРНЫЙ СПОСОБ УПРАВЛЕНИЯ ЧЕТЫРЕХКВАДРАНТНЫМ ИНВЕРТОРОМ НАПРЯЖЕНИЯ В СОСТАВЕ СИСТЕМЫ ГЕНЕРИРОВАНИЯ ЭЛЕКТРИЧЕСКОЙ ЭНЕРГИИ ПЕРЕМЕННОГО ТОКА | 2000 |
|
RU2207698C2 |
| СПОСОБ УПРАВЛЕНИЯ ТРЕХФАЗНЫМ СТАТИЧЕСКИМ ПРЕОБРАЗОВАТЕЛЕМ ПРИ НЕСИММЕТРИЧНОЙ НАГРУЗКЕ | 2010 |
|
RU2442275C1 |
| ВЕКТОРНЫЙ СПОСОБ УПРАВЛЕНИЯ ТРЕХФАЗНЫМ СТАТИЧЕСКИМ ПРЕОБРАЗОВАТЕЛЕМ ПРИ НЕСИММЕТРИЧНОЙ НАГРУЗКЕ | 2008 |
|
RU2394346C1 |
| ВЕКТОРНЫЙ СПОСОБ УПРАВЛЕНИЯ ТРЕХФАЗНЫМ СТАТИЧЕСКИМ ПРЕОБРАЗОВАТЕЛЕМ ПРИ НЕСИММЕТРИЧНОЙ НАГРУЗКЕ | 2010 |
|
RU2444833C1 |
| СИСТЕМА ВЕКТОРНОГО УПРАВЛЕНИЯ СКОРОСТЬЮ АСИНХРОННОГО ЭЛЕКТРОПРИВОДА | 1998 |
|
RU2158055C2 |
| СИСТЕМА УПРАВЛЕНИЯ МАШИНОЙ ДВОЙНОГО ПИТАНИЯ | 1995 |
|
RU2106055C1 |
| ЭЛЕКТРОПРИВОД С СИНХРОННЫМ ДВИГАТЕЛЕМ | 1995 |
|
RU2092967C1 |
| НЕПОСРЕДСТВЕННЫЙ ПРЕОБРАЗОВАТЕЛЬ ЧАСТОТЫ | 2001 |
|
RU2215359C2 |
| НЕПОСРЕДСТВЕННЫЙ ПРЕОБРАЗОВАТЕЛЬ ЧАСТОТЫ | 1998 |
|
RU2137283C1 |
| СИСТЕМА ВЕКТОРНОГО УПРАВЛЕНИЯ СКОРОСТЬЮ АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ | 2006 |
|
RU2317632C1 |
Предлагаемое изобретение относится к области управления системами генерирования электрической энергии переменного тока и может быть использовано для управления устройствами, преобразующими постоянное и многофазное переменное напряжение в переменное трехфазное. Векторный способ управления преобразователем состоит в том, что сигналы управления вырабатывают сравнением фазных напряжений преобразователя с эталонными сигналами, вырабатываемыми системой регулирования, перед выполнением операции сравнения фазные напряжения преобразовывают из трехфазной системы координат в систему α,β- координат с выделением нулевой последовательности, сравнение и регулирование производят в системе α,β- координат и нулевой последовательности, а полученные сигналы управления подают в блоки регулирования. После регулирования сигналы управления обратно преобразовывают в трехфазную систему координат и используют в качестве модулирующих сигналов преобразователя, управляющего силовыми ключами. Технический результат предлагаемого изобретения заключается в увеличении точности управления и возможности уменьшить время переходных процессов в системе за счет одновременного регулирования напряжения во всех фазах преобразователя. 1 ил.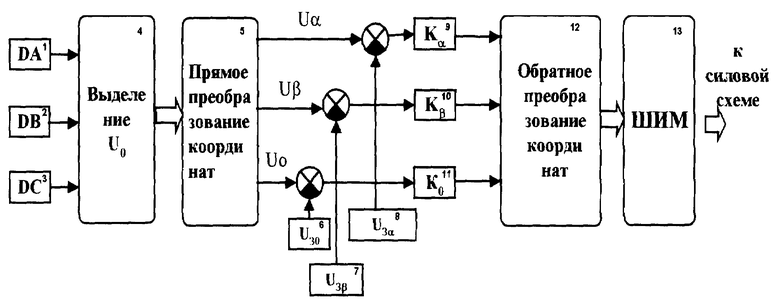
Векторный способ управления преобразователем, состоящий в том, что сигналы управления вырабатывают сравнением фазных напряжений преобразователя с эталонными сигналами, вырабатываемыми системой регулирования, полученные сигналы управления подают в блоки регулирования, а полученные после регулирования сигналы управления используют в качестве модулирующих сигналов преобразователя, управляющего силовыми ключами, отличающийся тем, что перед выполнением операции сравнения фазные напряжения преобразовывают из трехфазной системы координат в систему α,β - координат с выделением нулевой последовательности, сравнение и регулирование производят с сигналами в системе α,β - координат и нулевой последовательности, полученные сигналы регулирования обратно преобразовывают в трехфазную систему координат и на их основе формируют управляющие сигналы для силовых ключей.
| Силовые преобразователи электрической энергии | |||
| Межвузовский сборник научных трудов | |||
| - Новосибирск, 1989, с.3 - 19 | |||
| Стабилизированная трехфазная система питания | 1986 |
|
SU1396130A1 |
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ ТРАНСПОРТНОГО СРЕДСТВА (ВАРИАНТЫ) | 2016 |
|
RU2649840C1 |
