Изобретение относится системам управления, определяющим местоположение наземных транспортных средств в системе двух координат.
В настоящее время известны системы локального позиционирования, обеспечивающие движение машины по заданному треку как на основе радиопеленгации, так и оптические.
Системы с радиомаяками до недавнего времени использовали суммарно-дальномерный или разностно-дальномерный способ определения координат относительно маяков приемников или излучателей. Маяки, как правило, расставлялись исходя из минимизации ошибки определения координат. Последнее время появились системы, работа которых основана на непосредственном измерении расстояния между двумя радиомодемами. Такие устройства сразу нашли широкое применение и фактически полностью остановили развитие оптических систем, основанных на принципах пассивных оптических маркеров. На сегодняшний день оптические системы на пассивных маркерах сохранили за собой нишу только в определении направления на объект и расстояния до объекта, на который нанесены маркеры. Однако радиосистемам, основанным на измерении расстояния (как и их предшественникам суммарно- и разностно-дальномерным), присущи недостатки, связанные с влиянием структуры, конфигурации объекта и электромагнитного фона на распространение радиоволн. Поэтому подобные системы хорошо работают в условиях «открытого» для радиоволн пространства, когда нет электромагнитных помех, например работающего промышленного оборудования, и когда объект движется медленно. Именно поэтому на сегодняшний день по-прежнему для складской автоматизации, в основном, остаются наиболее актуальными системы, основанные на прокладке специальных кабелей-маркеров внутри покрытия пола, либо на нанесении на пол оптических маркеров. Для условий уличных применений, с высокой запыленностью, низким качеством покрытия и где требуется, как правило, скорость перемещения выше 15 км/ч и могут быть металлические конструкции, влияющие на распространение радиоволн, подобные решения не приемлемы. Вместе с тем расширяющаяся автоматизация технологических процессов во всех областях требует создания уличных систем позиционирования для автономных транспортных систем. При этом, GPS системы, которые широко используются для всех задач ориентации на улице, не обеспечивают достаточную точность в случае наличия затеняющих спутники объектов, или на территориях, где подавляется точный канал измерения.
Исходя из описанных выше ограничений перспективно использовать системы и способы, основанные на использовании активных оптических маяков.
Известен патент US 5745235, опубл. 28.04.1998, МПК B66F 9/24, в котором раскрыта измерительная система для проверки положения транспортного средства. Система включает ряд оптических маяков, которые являются оптическими отражателями инфракрасного излучения, чувствительное устройство, которое установлено на транспортном средстве. Чувствительное средство включает в себя две камеры, первая камера направлена приблизительно вдоль направления движения, вторая камера направлена вдоль направления вертикально вверх или вниз по отношению к плоскости, включающей путь движения транспортного средства. Один из маяков помещают таким образом, чтобы во время движения транспортного средства маяк был виден с помощью первой камеры, направленной вдоль направления движения транспортного средства. Другой маяк расположен вдоль заданной траектории, но находится выше или в поле наблюдения второй камеры. На основании сигналов двух камер определяется положение транспортного средства. Такая система может быть реализована только в закрытых помещениях с постоянными климатическими условиями эксплуатации.
Известен способ обеспечения управления перемещением всех видов транспортных средств, землеройных машин и другого тяжелого оборудования на строительной площадке, карьере. Положение всех машин, оборудования и транспортных средств определяется с использованием массива 3D лазерных сканеров (или любых 3D-устройств, цифровых изображений), расположенных по всему участку работы. Все эти данные передаются на блок дистанционной обработки по линии передачи данных или по сети. Блок обработки данных анализирует изображение и определяет положение машин, оборудования и транспортных средств. Текущее цифровое объемное изображение регистрируется и сохраняется в режиме реального времени, сравнивается с предыдущим изображением. Изменения в положении машин фиксируются и передаются на машины и механизмы в режиме реального времени. Данная система не предполагает определение положения автономно, на каждом транспортном средстве. Определение обстановки производится на центральном сервере и далее передается на конкретное транспортное средство.
Более близким аналогом является патент CA 2628657, опубл. 17.10.2008, МПК G01C 21/00, в котором система наземного ориентирования предполагает размещение по всей области эксплуатации транспортного средства оптических маяков. Оптические маяки излучают или отражают оптический сигнал на заданной частоте мигания. На транспортном средстве устанавливают, по меньшей мере, одну цифровую камеру. Цифровая камера формирует кадры изображения, путем обработки получают из двух последовательных кадров разностный кадр, а положение и ориентация транспортного средства определяется из данных, полученных из изображений оптических маяков в разностном кадре. Данный способ предполагает определение положения автономно, на каждом транспортном средстве. Однако при неблагоприятных условиях эксплуатации система не может обеспечить достаточную точность определения положения транспортного средства.
Техническим результатом, достигаемым в заявляемом изобретении, является упрощение реализации способа при повышении точности определения положения транспортного средства, в том числе при неблагоприятных условиях эксплуатации.
Способ управления движением транспортного средства по заданной траектории, по первому варианту, характеризуется следующим. Располагают оптические маяки с заранее известными координатами их расположения вблизи траектории движения транспортного средства, причем каждый маяк содержит два источника оптического излучения с монохромным спектром излучения, разнесенных на определенное расстояние, причем каждый из маяков имеет отличные от других маяков характеристики излучения. Устанавливают на транспортное средство, по меньшей мере, один приемник оптического сигнала, содержащий светочувствительную матрицу. Путем обработки полученного упомянутой матрицей изображения, содержащего, по меньшей мере, данные от трех маяков, определяют дистанцию от транспортного средства до каждого маяка. Далее определяют положение транспортного средства на местности, с учетом определенных дистанций до указанных маяков и их местоположения, полученного исходя из характеристик оптического излучения каждого из маяков.
Повышение точности определения положения транспортного средства, в том числе при неблагоприятных условиях эксплуатации в данном способе достигается за счет всех указанных признаков способа. Оптические маяки содержат два источника оптического излучения с монохромным спектром излучения, разнесенных на определенное, то есть известное заранее, расстояние, устанавливаются с заранее известными координатами их расположения и вблизи траектории движения. Благодаря этому, зная фокусное расстояние приемника оптического излучения, по полученному матрицей изображению можно точнее определить дистанцию до маяка, зная расстояние между источниками оптического излучения маяков. Точность определения расстояния также повышается, благодаря тому, что источники излучения имеют монохромное излучение, обладающее очень малым разбросом частот, в идеале - одной длиной волны. Кроме того, это излучение менее рассеивается при распространении в неблагоприятных атмосферных условиях. Кроме того, такой способ реализуется достаточно простыми средствами и не требует больших вычислительных мощностей на борту транспортного средства.
В частности, приемник оптического сигнала включает объектив с известным фокусным расстоянием. В качестве светочувствительной матрицы может быть использована светочувствительная цифровая матрица.
В частном случае маяки располагают по обеим сторонам трека движения поочередно.
Кроме того, могут использовать источники оптического излучения маяков с длиной волны соответствующей красному и синему спектру.
В частности, используют маяки с различными характеристиками, например различной частотной модуляцией светового излучения.
В некоторых случаях ограничивают направление излучения маяка определенным направлением, чтобы свет от дальних маяков не мешал работе с ближними маяками.
Способ управления движением транспортного средства по заданной траектории, по второму варианту, характеризуется следующим. Располагают оптические маяки с заранее известными координатами их расположения вблизи траектории движения транспортного средства, причем каждый маяк содержит два источника оптического излучения с монохромным спектром излучения, разнесенных на определенное расстояние, причем каждый из маяков имеет отличные от других маяков характеристики излучения. Устанавливают на транспортное средство, по меньшей мере, два приемника оптического сигнала, разнесенных в пространстве и содержащих светочувствительную матрицу. Путем обработки полученного упомянутой матрицей изображения, содержащего, по меньшей мере, данные от двух маяков определяют дистанцию от транспортного средства до каждого маяка и определяют положение транспортного средства на местности, с учетом определенных дистанций до указанных маяков и их местоположения, полученного исходя из характеристик оптического излучения каждого из маяков.
Отличие второго варианта от первого заключается в том, что на транспортное средство устанавливают, по меньшей мере, два приемника оптического сигнала, разнесенных в пространстве. Установка двух приемников позволяет в этом случае определять положение транспортного средства в пространстве по данным на изображении матрицы минимум двух маяков.
В частности, приемник оптического сигнала включает объектив с известным фокусным расстоянием. В качестве светочувствительной матрицы может быть использована светочувствительная цифровая матрица.
В частности, упомянутые маяки располагают по обеим сторонам трека движения поочередно.
Кроме того, могут использовать источники оптического излучения маяков со спектром излучения с длиной волны, соответствующей красному и синему спектру.
В частности, используют маяки с различными характеристиками, например различной частотной модуляцией светового излучения.
В некоторых случаях ограничивают направление излучения маяка определенным направлением.
Кроме того, один приемник оптического сигнала может быть расположен на транспортном средстве с направлением вперед по направлению движения, а другой приемник расположен на транспортном средстве с положением назад.
Изобретение поясняется рисунками.
На Фиг. 1 представлен общий вид трассы с оптическими маяками, расположенными вблизи траектории движения.
На Фиг. 2 приведена схема, поясняющая определение расстояние до маяка с двумя источниками оптического излучения.
На Фиг. 3 приведена схема с одним приемником оптического сигнала, установленным на транспортном средстве, поясняющая определение местоположение транспортного средства по сигналам трех маяков.
На Фиг. 4 приведена схема с одним приемником оптического сигнала, установленным на транспортном средстве, с другим расположением маяков относительно трассы движения.
На Фиг. 5 приведена схема с одним приемником оптического сигнала, установленным на транспортном средстве, при расположении маяков, обеспечивающих меньшую ошибку определения положения.
На Фиг. 6 приведена схема с двумя приемниками оптического сигнала, установленными на транспортном средстве, поясняющая определение местоположение транспортного средства по сигналам двух маяков.
Способ управления движением транспортного средства по заданной траектории выполняется следующим образом. Оптические активные маяки 1 располагаются вблизи траектории 2 движения транспортного средства 3 (Фиг. 1). Каждый маяк 1 (Фиг. 2) содержит два источника 4 оптического излучения с монохромным спектром, очень малым разбросом частот, в идеале - одной длиной волны. Такими источниками могут быть светодиодные излучатели, лазерные излучатели. При этом длина волны излучения желательно должна быть максимально отличной от длин волн, отражаемых естественными ландшафтами. Такому условию соответствует длина волны красного и синего спектра излучения. В этом случае в приемное оптическое устройство, установленное на транспортном средстве 3, не будут попадать паразитные отражения от элементов ландшафта, затрудняющие работу систему обработки оптических сигналов.
Каждый маяк 1 (Фиг. 2) имеет два источника оптического излучения 4, разнесенные на известное, заранее определенное расстояние h1. На рисунке источники 4 разнесены по высоте. При конструировании маяка 1 возможно разнесение источников излучения 4, в частности, по горизонтали, важно, чтобы они были установлены таким образом, чтобы свет от маяка попадал в приемники оптического излучения, установленные на транспортном средстве 3. Каждый из маяков 1 имеет отличные от других маяков характеристики излучения. Во-первых, они могут различаться по частоте излучения. Во-вторых, каждый из маяков может иметь свою модуляцию излучения, в простейшем случае, разную длительность свечения и различные временные перерывы между временем излучения.
Одним из ключевых операций данного способа является возможность определения дистанции от приемного оптического устройства, установленного на транспортном средстве 3 до конкретного маяка 1. На Фиг. 2 показана схема, поясняющая принцип определения расстояния. Она базируется на известной формуле для высоты объекта, фиксируемого на цифровой светочувствительной матрице 6 приемного оптического устройства:
h2/h1=F/L
где:
h1 - известное расстояние между источниками оптического излучения маяка;
h2 - расстояние между источниками оптического излучения маяка в кадре светочувствительной матрицы;
F - фокусное расстояние приемника оптического излучения, в частности, его объектива;
L - расстояние от приемного оптического устройства до маяка.
На основании данной зависимости легко вычислить расстояние L до конкретного маяка, так как остальные три параметра известны.
Если абсолютная координата каждого маяка заранее известна, они устанавливаются с заранее известными координатами их расположения, то приемник оптического излучения, установленный на транспортном средстве 3, находится на окружности, описанной вокруг конкретного маяка 1. Если проводится измерение расстояния до двух маяков, позиция приемника оптического излучения сходится к двум точкам, а трех маяков к одной. Зная высоты и положения двух-трех маяков, можно определить координаты приемника оптического излучения, установленного на транспортном средстве.
На Фиг. 3 - Фиг. 6 показаны схемы, поясняющие способ определения положения транспортного средства на местности.
Схемы на Фиг. 3 - Фиг. 5 относятся к случаю, когда на борту транспортного средства 3 установлен один приемник оптического сигнала, содержащий цифровую светочувствительную матрицу 6. Способ реализуется следующим образом.
Располагают оптические маяки 1 с заранее известными координатами их расположения вблизи траектории движения транспортного средства. На транспортном средстве установлен один приемник оптического сигнала, направленный вперед, по ходу движения. Светочувствительная матрица приемного устройства регистрирует сигналы, по меньшей мере, трех маяков 1 (На рисунках маяки обозначены буквой M и цифрой, например M1.). До каждого маяка вычисляется дистанция L. Так как каждый маяк имеет собственные, отличные от других характеристики излучения, и каждый маяк привязан к определенной точке местности, определяется принадлежность полученных сигналов к конкретному маяку и решается простая тригонометрическая задача определения положения транспортного средства.
На Фиг. 3 приведен случай, когда маяки 1 установлены вблизи траектории 2 движения и поочередно по ходу движения транспортного средства 3. В этом случае изображения маяков 1 на матрице 6 будут расположены вблизи друг от друга. В этом случае потребуется матрица 6 с высоким разрешением. Если располагать маяки 1, например, как показано на Фиг. 4, то разрешение матрицы 6 потребуется меньше, ввиду большего углового разрешения изображений маяков. На Фиг. 5 показан пример с еще большим расстоянием маяков 1 от примерно прямолинейной трассы 2. В этом случае определение местоположения будет точнее. Следует заметить, что в поле «зрения» приемника оптического сигнала может попадать излучение более дальних маяков. В этом случае на маяки могут устанавливаться ограничители направления излучения маяков, определенным, заранее заданным, направлением.
Кроме того, на транспортное средство могут устанавливаться несколько приемников оптического сигнала, которые могут быть установлены между собой на некотором расстоянии, или направлены в разные стороны. В этом случае данные от различных приемников оптического сигнала обрабатываются совместно.
На Фиг. 6 показан пример, когда на транспортном средстве 3 установлены два приемника оптического сигнала, при этом один приемник располагают на транспортном средстве 3 с направлением вперед по направлению движения, а другой приемник располагают с положением назад. В этом случае для определения положения транспортного средства достаточно сигналов от двух маяков 1, один из которых находится впереди, а другой сзади транспортного средства 3. Точность определения по двум маякам 1 не самая высокая, но навигация транспортного средства 3 вполне возможна. Естественно, что большее число маяков 1, сигналы которых будут обработаны, повысит точность определения положения транспортного средства.
Предложенный способ прост в исполнении, эффективен даже при неблагоприятных погодных и производственных условиях и не требует сложного оборудования. Он может быть реализован в автономной транспортной системе.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ точной посадки беспилотного летательного аппарата и устройство для реализации способа | 2021 |
|
RU2773978C1 |
| ПОДВОДНАЯ СТАНЦИЯ | 2009 |
|
RU2388021C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ И УГЛОВ ОРИЕНТАЦИИ ЛЕТАТЕЛЬНОГО АППАРАТА ОТНОСИТЕЛЬНО ВЗЛЕТНО-ПОСАДОЧНОЙ ПОЛОСЫ | 2014 |
|
RU2548366C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ И УГЛОВ ОРИЕНТАЦИИ ЛЕТАТЕЛЬНОГО АППАРАТА ОТНОСИТЕЛЬНО ВЗЛЕТНО-ПОСАДОЧНОЙ ПОЛОСЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2378664C1 |
| УНИВЕРСАЛЬНЫЙ СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ ОБЪЕКТА С ПОМОЩЬЮ ОПТИЧЕСКОЙ НАВИГАЦИОННОЙ СИСТЕМЫ | 2016 |
|
RU2638876C1 |
| КОМПЛЕКС СРЕДСТВ АВТОНОМНОЙ ПОСАДКИ БЕСПИЛОТНОГО ВОЗДУШНОГО СУДНА | 2023 |
|
RU2813215C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ И УГЛОВ ОРИЕНТАЦИИ ЛЕТАТЕЛЬНОГО АППАРАТА ОТНОСИТЕЛЬНО ВЗЛЕТНО-ПОСАДОЧНОЙ ПОЛОСЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2347240C2 |
| СИСТЕМА И СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ВОДОЛАЗА | 2014 |
|
RU2575045C1 |
| Гидроакустическая навигационная система дальнего радиуса действия | 2022 |
|
RU2790937C1 |
| Способ контроля диаграммы направленности антенны облетным методом с помощью БПЛА | 2022 |
|
RU2836791C2 |



Группа изобретений относится к способам управления движением транспортного средства по заданной траектории. В первом способе для управления движением транспортного средства располагают оптические маяки с заранее известными координатами вблизи траектории движения, каждый из которых содержит два источника оптического излучения с монохромным спектром излучения, имеющие различные характеристики излучения и расположенные определенным образом. Определяют положение транспортного средства на местности с помощью приемника оптического сигнала, установленного на транспортном средстве и содержащего светочувствительную матрицу путем обработки сигналов от трех маяков определенным образом. Во втором способе используют два приемника оптического сигнала, установленных на транспортном средстве определенным образом, и обрабатывают сигналы от двух маяков. Обеспечивается точность определения положения транспортного средства при неблагоприятных условиях эксплуатации. 2 н. и 13 з.п. ф-лы, 6 ил.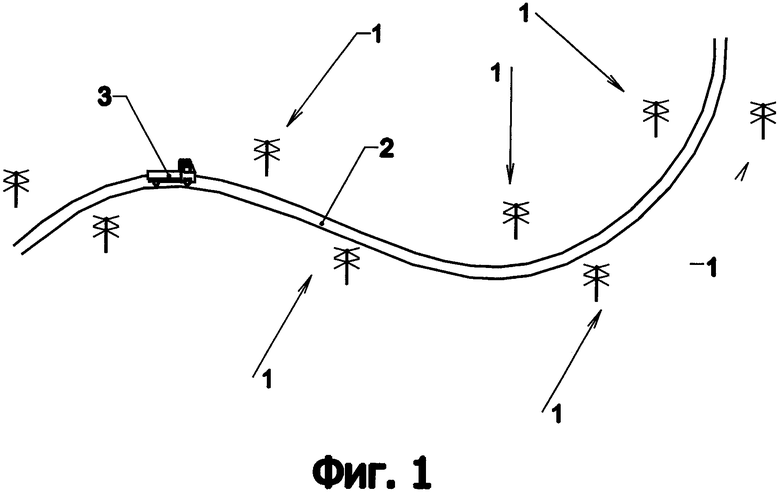
1. Способ управления движением транспортного средства по заданной траектории, характеризующийся тем, что располагают оптические маяки с заранее известными координатами их расположения вблизи траектории движения транспортного средства, причем каждый маяк содержит два источника оптического излучения с монохромным спектром излучения, разнесенных на определенное расстояние, причем каждый из маяков имеет отличные от других маяков характеристики излучения; устанавливают на транспортное средство, по меньшей мере, один приемник оптического сигнала, содержащий светочувствительную матрицу; путем обработки полученного упомянутой матрицей изображения, содержащего, по меньшей мере, данные от трех маяков, определяют дистанцию от транспортного средства до каждого маяка, определяют положение транспортного средства на местности, с учетом определенных дистанций до указанных маяков и их местоположения, полученного исходя из характеристик оптического излучения каждого из маяков.
2. Способ по п. 1, характеризующийся тем, что приемник оптического сигнала включает объектив с известным фокусным расстоянием.
3. Способ по п. 1, характеризующийся тем, что в качестве светочувствительной матрицы используют светочувствительную цифровую матрицу.
4. Способ по п. 4, характеризующийся тем, что упомянутые маяки располагают по обеим сторонам трека движения поочередно.
5. Способ по п. 1, характеризующийся тем, что используют источники оптического излучения маяков с длиной волны, соответствующей красному и синему спектру.
6. Способ по п. 1, характеризующийся тем, что используют маяки с различными характеристиками, например различной частотной модуляцией светового излучения.
7. Способ по п. 1, характеризующийся тем, что ограничивают направление излучения маяка определенным направлением.
8. Способ управления движением транспортного средства по заданной траектории, характеризующийся тем, что располагают оптические маяки с заранее известными координатами их расположения вблизи траектории движения транспортного средства, причем каждый маяк содержит два источника оптического излучения с монохромным спектром излучения, разнесенных на определенное расстояние, причем каждый из маяков имеет отличные от других маяков характеристики излучения; устанавливают на транспортное средство, по меньшей мере, два приемника оптического сигнала, разнесенных в пространстве и содержащих светочувствительную матрицу; путем обработки полученного упомянутой матрицей изображения, содержащего, по меньшей мере, данные от двух маяков, определяют дистанцию от транспортного средства до каждого маяка и определяют положение транспортного средства на местности, с учетом определенных дистанций до указанных маяков и их местоположения, полученного исходя из характеристик оптического излучения каждого из маяков.
9. Способ по п. 8, характеризующийся тем, что приемник оптического сигнала имеет объектив с известным фокусным расстоянием.
10. Способ по п. 8, характеризующийся тем, что в качестве светочувствительной матрицы используют светочувствительную цифровую матрицу.
11. Способ по п. 8, характеризующийся тем, что упомянутые маяки располагают по обеим сторонам трека движения поочередно.
12. Способ по п. 8, характеризующийся тем, что используют источники оптического излучения маяков с длиной волны, соответствующей красному и синему спектру.
13. Способ по п. 8, характеризующийся тем, что используют маяки с различными характеристиками, например различной частотной модуляцией светового излучения.
14. Способ по п. 8, характеризующийся тем, что ограничивают направление излучения маяка определенным направлением.
15. Способ по п. 8, характеризующийся тем, что один приемник оптического сигнала располагают на транспортном средстве с направлением вперед по направлению движения, а другой приемник располагают на транспортном средстве с положением назад.
| СПОСОБ И УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ДВИЖУЩЕГОСЯ ОБЪЕКТА ПОСРЕДСТВОМ ИСПОЛЬЗОВАНИЯ СВЯЗИ С ПОМОЩЬЮ СВЕТА В ВИДИМОЙ ОБЛАСТИ СПЕКТРА | 2008 |
|
RU2406232C2 |
| ИЗМЕРИТЕЛЬНОЕ УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ РАССТОЯНИЯ МЕЖДУ НИМ И ЦЕЛЕВЫМ ОБЪЕКТОМ С ПОМОЩЬЮ ИЗМЕРИТЕЛЬНОГО ОПТИЧЕСКОГО ИЗЛУЧЕНИЯ | 2012 |
|
RU2602734C2 |
| УСТРОЙСТВО ДЛЯ ОПТИЧЕСКОГО ИЗМЕРЕНИЯ РАССТОЯНИЙ | 2007 |
|
RU2442107C2 |
| WO 2005098476 A1, 20.10.2005 | |||
| US 9250081 B2, 02.02.2016. | |||

