Изобретение относится к медицине, более конкретно, к способам массажа и массажным робототехническим устройствам универсального типа для программируемого автоматического массажа поглаживанием, разминанием, растиранием и т. д. Изобретение применимо для осуществления любого типа массажа - общего и гигиенического, спортивного, лечебного, косметического. Кроме того, изобретение позволяет производить поиск и воздействие на биологически активные точки.
До сих пор задача облегчения тяжелого труда массажиста решалась путем использования различных аппаратных средств, а также путем использования массажных кушеток, кресел, оснащенных перемещаемым электроприводом массажным инструментом - см. , например, патент США 5385531 (EUROKEYTON SA), опубл. 31.01.95.
В качестве ближайшего аналога целесообразно принять массажный робот и способ массажа, им реализуемый, по патентному документу Японии, имеющему номер публикации 06304217 А (YOKOYAMA MITSUHIRO), дата публикации описания - 01.11.94, кл. A 61 H 7/00. Это устройство оснащено блоком управления, расположенным в корпусе и предназначенным для управления перемещением основания, и включает привод перемещения относительно оси, скользящий элемент, гидравлический цилиндр и средство для осуществления пальцевого надавливания - имитатор пальца. Общими для ближайшего аналога и заявленного изобретения являются операции воздействия на поверхность тела человека с помощью массажного инструмента - имитатора части руки массажиста, перемещение инструмента осуществляют по программе от системы управления с помощью приводов. В части устройства общими являются следующие признаки: наличие массажного инструмента, привода массажного инструмента и системы управления. Данное изобретение решает задачу разгрузки массажиста и позволяет облегчить его труд. Однако оно неуниверсально и предназначено для проведения в основном точечного или пальцевого массажа. Перенастройка робота с точечного воздействия на массаж на протяженных участках невозможна. Кроме того, в известном изобретении отсутствует силовой контроль за массажным воздействием.
Сущность изобретения.
Общеизвестно, что массаж являeтся эффективным средством лечения, а именно восстанавливает работоспособность, способствует снятию усталости, а главное - служит для предупреждения и профилактики многих заболеваний, являясь активным средством оздоровления организма.
Известные массажные устройства позволяют проводить специфические виды массажа и не являются универсальными средствами. Таким образом, для проведения разных типов массажного воздействия требуется большой арсенал механических и электрических приборов.
Настоящее изобретение направлено на решение задачи облегчения монотонного и тяжелого труда массажиста. Кроме того, изобретение направлено на создание универсального автоматизированного устройства для массажа на основе манипуляционной робототехнической системы (РТС).
РТС в промышленной робототехнике - робототехническая система, представляющая промышленный робот с инструментом для выполнения основной технологической операции.
Промышленный робот состоит из манипулятора и программируемой системы управления.
Манипулятор представляет собой многозвенный механизм, перемещаемый электромагнитными приводами.
Система управления представляет собой многопроцессорное вычислительное устройство с программным обеспечением и контроллерами приводов манипулятора.
Контурное управление обеспечивает заданную траекторию движения инструмента с заданной скоростью.
Технический результат, достигаемый в результате применения изобретений, заключается в обеспечении универсальности выполнений различных видов массажа под силовым контролем. Дополнительный технический результат заключается в повышении точности отработки массажных движений.
Технический результат достигается за счет того, что в способе массажа путем механического воздействия на поверхность тела пациента с помощью массажного инструмента массажный инструмент закрепляют на манипуляторе робота и осуществляют перемещение массажного инструмента по поверхности тела с помощью манипулятора робота, при этом контролируют величину массажного воздействия.
Технический результат усиливается за счет того, что предварительно задают траекторию движения массажного инструмента, продолжительность, скорость и величину воздействия, и проводят операцию обучения робота к индивидуальной поверхности тела пациента, а в процессе массажа поддерживают величину массажного воздействия в заданных пределах и периодически осуществляют коррекцию программы для исключения случайных отклонений.
В качестве робота используют промышленный робот с электромеханическим приводом и контурной системой управления.
В качестве робота используют промышленный робот РМ-01 с системой управления "Сфера-36".
Траекторию движения массажного инструмента задают реперными точками, которыми для массажа на спине являются седьмой шейный позвонок и копчик.
Устройство для массажа содержит массажный инструмент, соединенный с исполнительным механизмом с возможностью управляемого перемещения, и отличается тем, что исполнительное устройство выполнено в виде манипулятора робота, оснащенного электромеханическими приводами, а на массажном инструменте установлен датчик для измерения величины массажного воздействия, соединенный с системой управления.
Датчик для измерения величины массажного воздействия на плоских участках поверхности тела является однокомпонентным датчиком нормальной составляющей силы.
Датчик для измерения величины массажного воздействия на рельефных участках поверхности тела является шестистепенным силомоментным датчиком.
Массажный инструмент закреплен на фланце манипулятора через разъем с возможностью съема и замены.
Массажный инструмент выполнен в виде имитатора ребра ладони.
Массажный инструмент выполнен в виде имитатора плоскости ладони.
Массажный инструмент выполнен в виде разведенных в противоположные стороны имитатора большого и указательного пальцев.
Массажный инструмент выполнен в виде имитатора подушечки большого пальца.
Датчик для измерения величины массажного воздействия выполнен с использованием тензоэлементов для измерения от одной до шести компонент вектора силы и момента, наклеенных на упругие элементы.
В устройство введено средство отключения манипулятора робота при неадекватных ощущениях пациента, выполненное в виде кнопочного выключателя или микрофонного устройства, связанных с системой управления.
Массажный инструмент снабжен средством для подогрева.
Приведенный ниже пример осуществления способа и выполнения устройства для массажа позволяет более подробно пояснить получаемый технический результат.
Сущность изобретения поясняется чертежами, где на фиг. 1 представлена структурная схема устройства для массажа; на фиг. 2 - различные виды массажных инструментов, используемых в устройстве; на фиг. 3 - ряд конструкций датчиков для измерения величины массажного воздействия; на фиг. 4 - структурная схема интерфейса для подключения двухкомпонентного датчика к системе управления "Сфера-36"; на фиг. 5 - процесс обучения робота на номинальном пациенте; на фиг. 6 - схема обеспечения усилия при массаже.
Пример конкретного выполнения изобретения.
Заявленный способ массажа целесообразно осуществлять с применением уже известного и широко используемого в промышленности для различных целей робота, который не требует значительной доработки и путем минимальных преобразований, касающихся размещения массажного инструмента и датчика, а также интерфейса для связи робота с датчиком и соответствующих программных средств преобразуется в робот-массажист. Пример приведен для одного вида промышленного робота, но способ и устройство могут быть осуществлены с применением практически любого известного промышленного робота с манипулятором и контурной системой управления.
Таким роботом является промышленный робот РМ-01, который имеет антропоморфный манипулятор (фиг. 1) 1 с шестью степенями подвижности. Размеры звеньев 2, 3, 4 руки манипулятора примерно такие же, как у человека среднего роста. Развиваемое рукой усилие до 60 Н, максимальная контурная скорость 1000 мм/с, погрешность позиционирования равна 0,1 мм. Манипулятор 1 состоит из верхней части 2 руки, предплечья 3, кисти 4. На кисти 4 к ее фланцу 5 через разъем 6 и датчик 7, использующий тензоэлементы, наклеенные на упругий элемент (не показан), сменно закреплен массажный инструмент 8. Перемещения манипулятора 1 осуществляют электромеханическими приводами 11 от системы управления 9. Датчик 7 связан с системой управления 9 через специально разработанный интерфейс 10 для целей применения робота как массажного устройства.
Программное обеспечение робота представляет собой операционную систему реального времени. Язык прикладного программирования робота ARPS - роботоориентированный язык, допускает программирование обучением и аналитическое - расчетом.
Сменный массажный инструмент 8 представляет собой имитатор пальцев массажиста или других частей его руки. На фиг. 2 показаны инструменты для имитации разминаний, поглаживаний и выжиманий: а) имитатор подушечки большого пальца 13, б) имитатор ребра ладони 14, в) имитатор плоскости ладони 15, г) имитатор растянутых в противоположные стороны большого 16 и указательного 17 пальцев, д) имитатор защипывающих большого 18 и среднего 19 пальцев; е) каталки 20, 21, ж) конус 22 с шариком 23.
Сменный инструмент выполнен в виде, максимально приближенном к имитируемому органу. Например, имитаторы плоскости ладони 15 - в виде подушечки по размеру ладони без пальцев, наполненной легким мягким материалом и обтянутой замшей. "Ребро ладони" 14 выполнено в виде деревянной или пластмассовой пластины, обтянутой замшей или иной мягкой материей. Для комфортного восприятия пациентом инструменты могут подогреваться изнутри электрическим током, подогрев осуществляется широко применяемыми в промышленности нагревательными элементами 12.
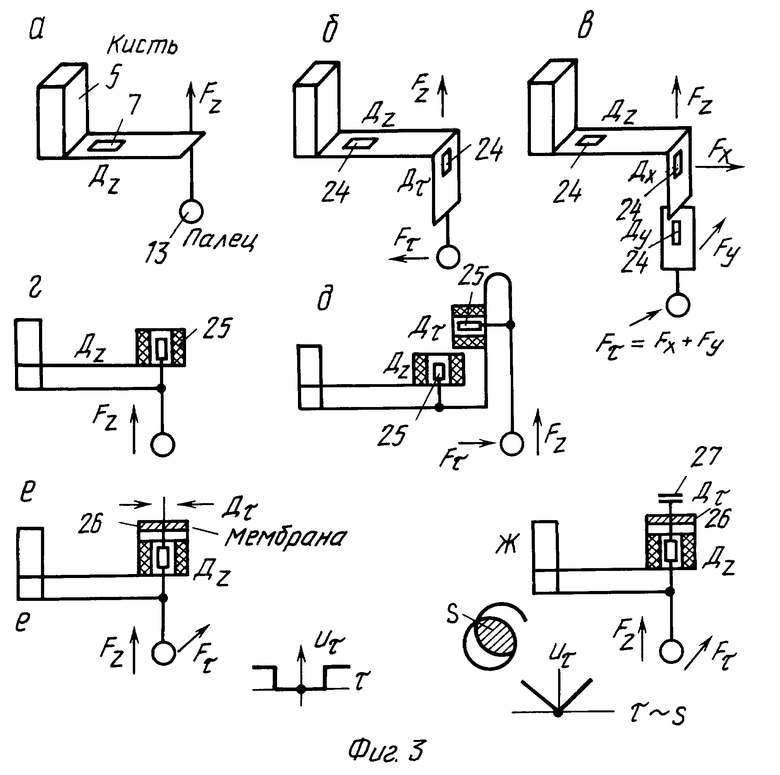
Для силомоментного управления роботов применяются датчики 7 различной физической природы (фиг. 3). Полную информацию о векторе сил-моментов представляют многокомпонентные датчики на основе тензоэлементов 24. Тензоэлементы 24 наклеивают на упругие элементы и измеряют деформации порядка микрометров, что меньше погрешности позиционирования робота.
При выполнении мягких массажных движений для обеспечения необходимых усилий возможны смещения пальца на несколько миллиметров. Упругий элемент робота может быть не только базой для крепления измерителей деформации, но и сглаживающим элементом. Поэтому для измерения компонент усилия могут быть использованы потенциометры, герконы, емкостные и дифференциальные индуктивные датчики.
На фиг. 3 приведен ряд конструкций для измерения массажного воздействия. Конструкции а), б), в) имеют тензодатчики для измерения от одной до трех компонент соответственно. По аналогии с а) и б) конструкции г) и д) выполнены на дифференциально-трансформаторных элементах 25. Измерение второй компоненты возможно лишь в направлении движения кисти, боковые смещения неизмеримы. Измерять касательную компоненту можно конструкцией а) с тензоэлементами или конструкциями е), ж), где упругость в касательном направлении обеспечивает резиновая мембрана 26. В конструкции е) измерительным элементом касательной компоненты является круговой электроконтактный датчик, а конструкции ж) - емкостной 27.
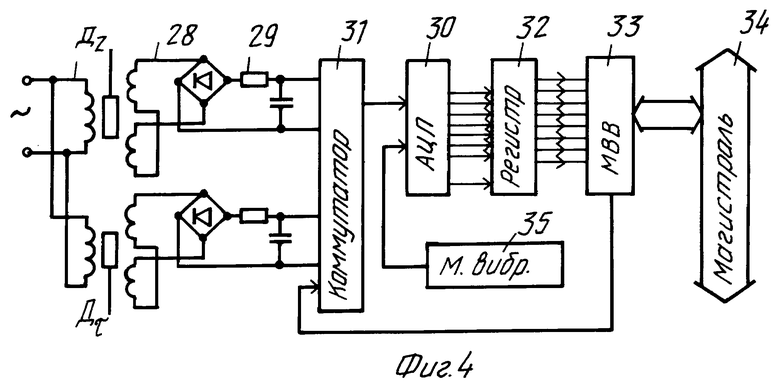
Для подключения датчиков 7 к системе управления 9 используется интерфейс 10. На фиг. 4 приведена структурная схема интерфейса для подсоединения двухкомпонентного индукционного датчика к магистрали системы управления 9. Датчик 7 запитывается переменным напряжением 36 В частотой 50 Гц. Выходной сигнал датчика для последующей оцифровки выпрямляется двухполупериодным выпрямителем 28 и сглаживается фильтром 29. Коммутатор 31 в режиме разделения времени подключает каждую компоненту датчика к аналого-цифровому преобразователю АЦП 30. АЦП оцифровывает аналоговый сигнал датчика и через регистр 32 и модуль ввода-вывода 33 системы управления 9 робота РМ-01 выставляет сигнал на магистраль 34 системы управления 10. Для определения момента подхода инструмента к телу пациента перед касанием предназначен инфракрасный датчик 36 подхода инструмента к телу пациента. Датчик подключается к системе управления 9 через модуль ввода. Он необходим для повышения быстродействия робота-массажиста за счет повышения скорости подхода к массируемым участкам. По сигналу датчика 36 скорость подхода переключается на более низкую, что уменьшает перерегулирование по нажатию. Датчик включает источник инфракрасного излучения и приемник, оптические оси которых пересекаются на теле пациента. Отраженный свет попадает в приемник, а пороговое устройство вырабатывает сигнал срабатывания.
Для коррекции сдвигов пациента во время проведения сеанса используется система технического зрения 37 (см. фиг. 1). В результате обработки изображения пациента система вычисляет смещение его относительно номинального. Система управления робота в соответствии с этими смещениями вырабатывает новые координаты точек, по которым выполняются массажные траектории. Система 37 включает видеокамеру, подключенную к персональному компьютеру, использующему дополнительную (Фреймгребер) плату в корзине компьютера для запоминания изображения. Персональный компьютер через последовательный интерфейс RS-232 передает информацию о смещениях пациента в систему управления робота.
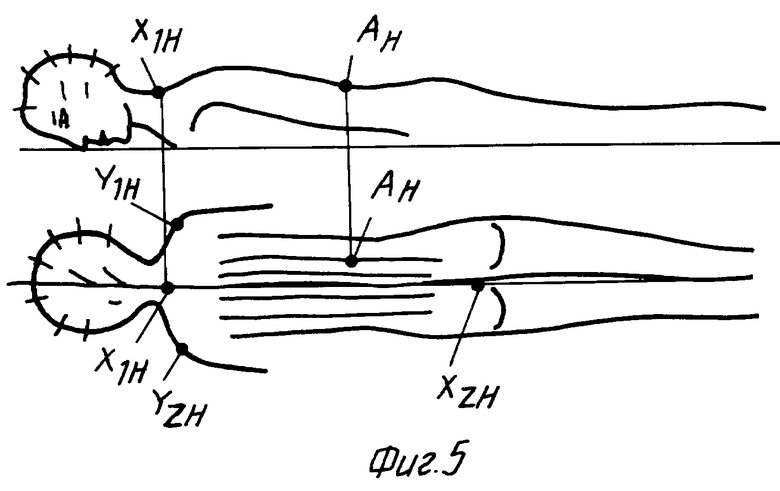
При осуществлении способа массажа согласно настоящему изобретению с помощью устройства ввода системы управления "Сфера-36" задают продолжительность и величину массажного воздействия, а также скорость выполнения операции. Траекторию движения задают путем обучения РСТ на номинальном пациенте (фиг. 5). Для этого на спине номинального пациента (среднего, без резких отклонений от нормального физического развития) для последующего осуществления массажа спины размечают по пять точек на четырех полосах вдоль позвоночника (две полосы с одной и две с другой стороны позвоночника). Точки Ан (всего 20 точек) фиксируются при касании инструмента со спиной. Они задаются как комбинированные точки относительно точки Х1н (С7 - седьмой выступающий шейный позвонок). Записывается в память также точка Х2н (копчик). Инструментальная ось X ориентируется вдоль направления Х1н - Х2н. Расстояние между точками Х1н и Х2н будет определять масштаб вдоль оси X. Далее в память записываются две точки У1н и У2н (акремионы), характеризующие ширину спины и поэтому масштаб вдоль оси У. 20 точек вдоль полос записываются так, чтобы характеризовать основные особенности рельефа длинных мышц спины. Для номинального пациента эта процедура проводится один раз. Возможен уточненный вариант, когда все указанные точки записываются на дискету для каждого пациента.
Ориентация и позиционирование конкретного пациента производятся следующим образом. Когда конкретный пациент ложится в рабочую зону робота, его приближенно ориентируют позвоночником вдоль оси X так, чтобы точка Х1д (седьмой шейный позвонок данного пациента) находилась примерно рядом с точкой Х1н, подсказываемой инструментом робота. Записывают в память новую точку Х1д, подводя инструмент к седьмому шейному позвонку данного пациента так, чтобы инструментальная ось X была направлена по прямой Х1д, Х2д. Далее производят масштабирование данного пациента. В память записывают точки У1д, У2д, принадлежащие данному пациенту и определяющие ширину его спины. Программой "масштабирование" по четырем новым точкам осуществляют растяжение или сжатие координат точек А. Образуются новые 20 точек Ад.
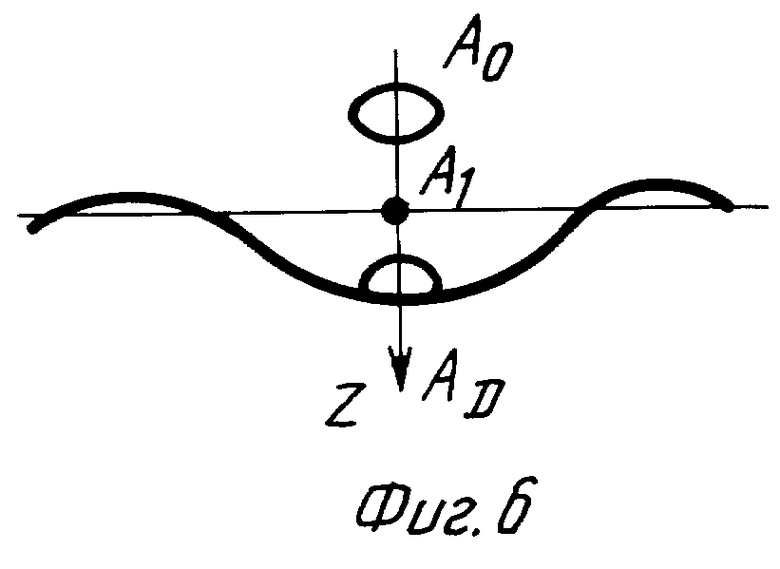
Самообучение и образование точек Вд, в которых обеспечивается заданное усилие. Из каждой точки Ад (точнее, немного выше в направлении, обратном инструментальной оси) инструмент опускается до касания тела пациента и нажимает так, чтобы обеспечить программно-заданное усилие. При этом образуется множество точек Вд. Точки Вд характеризуют деформированную с заданным усилием поверхность спины пациента в момент времени, когда проводится обучение точек. Режим самообучения может повторяться с частотой, зависящей от времени неподвижности пациента. Робот готов к проведению массажных операций на данном конкретном пациенте.
Поглаживание. Если точки Вд получены при малых усилиях, то робот, интерполируя траектории вдоль этих точек, своим инструментом будет выполнять поглаживание. Для этой процедуры используют в основном имитатор плоскости ладони, а если траектория движения незначительна (для малых участков и малых мышц) - имитатор большого пальца.
Выжимание. Сохраняя те же траектории, что для поглаживания, но увеличив силу прижатия инструмента к телу, робот будет выполнять выжимание. Эта манипуляция осуществляется с использованием тех же имитаторов плюс имитатор ребра ладони.
Разминание. Если окрестности точек Вд достаточно плоские и с однородной упругостью, то на них строят витки разминания с любыми геометрическими и скоростными параметрами.
Подобно тому как выполняются обучение робота и массажные процедуры на мышцах спины, осуществляют массажные процедуры на любых других участках поверхности тела пациента. Поиск биологически активных точек осуществляется согласно правилу китайских цуней. В случае неадекватных ощущений пациент либо кнопочным выключателем 35, либо голосом посредством микрофонного устройства через усилитель, подключенный к системе управления 9, отключает манипулятор 1 робота. Массаж прекращается.
Заявленный способ был применен на практике для реабилитации рабочих и служащих. Ниже приведены данные для реальных пациентов, проведших курс массажа с использованием заявленного способа и устройства.
Пример 1. Сидоров В.Э., 40 лет, инженер-программист. До прохождения курса массажа жалобы на боли в спине, утомляемость. Назначен и проведен курс из 10 сеансов по 25 мин. Каждый сеанс строился следующим образом. Перед размещением пациента в зоне массажа проведена диагностика электронной и механической части устройства. Произведено загружение в ОЗУ СУ "Сфера-36" точек номинального пациента. Установлены параметры для данного пациента и данной массируемой области: вид массажа, вид массируемого участка, характер траекторий, радиус витка спирали при разминании 5-2 мм, скорость 0,1-0,5 м/с, усилие нажатия 5-50 Н, число повторений 20-100. Пациент ложился в зоне массажа. Производилось обучение реперных точек. Программа SCALE выполняла позиционирование, ориентацию и масштабирование для данного пациента, вырабатывая координаты точек, необходимых для программы "Самообучение". По программе "Самообучение", заложенной в СУ "Сфера-36", уточнены предварительно полученные точки с учетом рельефа и упругости тканей данного пациента. Включена программа "Исполнение" для массива точек, полученных в режиме "Самообучение". Массажный инструмент передвигается в соответствии с программой манипулятором. Периодически в зависимости от неподвижности пациента (период 10 - 100 с) система технического зрения корректирует возможные сдвиги пациента, а включенная в это время программа "Самообучение" уточняет точки с учетом заданных усилий. После прохождения курса самочувствие пациента улучшилось, работоспособность высокая, не отмечено ни одного раздражающего фактора и неадекватного ощущения. Режим останова манипулятора не использовался.
Пример 2. Пациент Иванов В.Ф., 38 лет, рабочий конвейера. Отмечал постоянную усталость мышц спины и стоп. Количество назначенных сеансов 8 по 20 мин на спине и соответственно 10 мин на стопах. Порядок действий при проведении процедур тот же, за исключением проведения корректировки сдвигов пациента. В данном случае система технического зрения не использовалась, корректировка проводилась в режиме "Самообучение" через равные интервалы времени. После окончания курса массажа самочувствие улучшилось, работоспособность повысилась, не отмечено ни одного случая использования экстренного останова или отрицательных ощущений во время процедуры.
| название | год | авторы | номер документа |
|---|---|---|---|
| Набор устройств для проведения массажа и способ проведения массажа | 2018 |
|
RU2682995C1 |
| ЛЕЧЕБНО-ОЗДОРОВИТЕЛЬНОЕ УСТРОЙСТВО | 2002 |
|
RU2236211C2 |
| СПОСОБ МАССАЖА ЕЛЕНЫ МУСТАФАЕВОЙ | 2011 |
|
RU2469695C2 |
| СПОСОБ ЛЕЧЕНИЯ ЗАБОЛЕВАНИЙ ГЛАЗ | 1997 |
|
RU2105534C1 |
| Способ ручного массажа | 2019 |
|
RU2722083C1 |
| Способ функциональной коррекции позвоночника | 2017 |
|
RU2641061C1 |
| АДАПТИВНЫЙ МОБИЛЬНЫЙ ПРОСТРАНСТВЕННЫЙ РЕАБИЛИТАЦИОННЫЙ РОБОТ-МАНИПУЛЯТОР И СПОСОБ ОРГАНИЗАЦИИ ДВИЖЕНИЙ И ДИАГНОСТИКИ ПАЦИЕНТА С ЕГО ПОМОЩЬЮ | 2014 |
|
RU2564754C1 |
| СПОСОБ МАССАЖА | 2013 |
|
RU2522380C1 |
| СПОСОБ И УСТРОЙСТВО ОЗДОРОВЛЕНИЯ ОРГАНИЗМА ЧЕЛОВЕКА | 2004 |
|
RU2282429C2 |
| КОМБИНИРОВАННЫЙ СПОСОБ КОРРЕКЦИИ ФИГУРЫ | 2022 |
|
RU2800697C2 |

Изобретение предназначено для использования в массажных устройствах универсального типа для программируемого автоматического массажа. Технический результат заключается в обеспечении универсальности выполнений любых видов массажа и на любых участках тела. Дополнительный технический результат заключается в повышении точности отработки массажных движений. Способ массажа осуществляется путем механического воздействия на поверхность тела пациента с помощью массажного инструмента, перемещаемого по программе. Массажный инструмент устанавливают на манипуляторе робота и выполняют перемещение массажного инструмента по поверхности тела пациента, контролируя величину массажного воздействия. Устройство для массажа содержит массажный инструмент, соединенный с возможностью управляемого перемещения с исполнительным устройством. Исполнительное устройство выполнено в виде манипулятора робота, оснащенного электромеханическими приводами и системой управления, а на массажном инструменте установлен соединенный с системой управления датчик для измерения величины массажного воздействия. 2 с. и 13 з.п.ф-лы, 6 ил.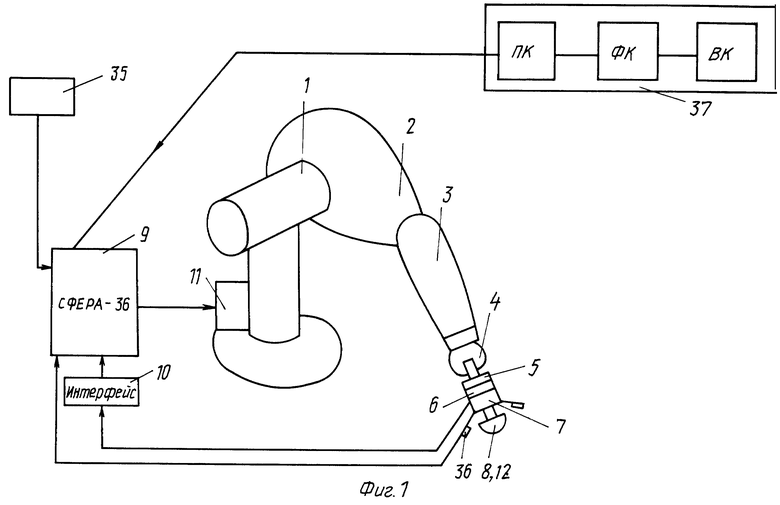
| US 4412535 A, 01.11.83 | |||
| Устройство для самомассажа | 1977 |
|
SU660682A1 |
| DE 3436389 A1, 10.04.86 | |||
| US 4721100 A, 26.01.88. | |||

